Sistem Pendeteksi Orang Tergeletak berbasis sebuah
Kamera Pengawas dengan menggunakan metode
Template Matching
Tulisan ini membahas pengembangan suatu sistem yang dapat mendeteksi orang tergeletak memanfaatkan sebuah kamera pengawas. Model pendeteksi orang tergeletak ini dapat dikembangkan sebagai sistem peringatan dini untuk orang tergeletak sehingga orang tersebut bisa mendapat pertolongan secepatnya.
Sistem ini dirancang untuk lingkungan dalam ruangan (indoor) menggunakan kamera yang terhubung ke komputer sebagai devais masukan citra. Setiap citra masukan kamera tersebut akan diolah dengan metode background subtraction, thresholding, median filtering, hole-filling, segmentasi objek dan template matching.
Pengujian sistem menunjukkan bahwa hasil pendeteksian terbaik (Hit 65.28%, Miss Detection 34.72%, Correct Rejection 54.48%, dan False Alarm 45.52%) didapatkan dari parameter
background subtraction, hole-filling, median filtering, segmentasi objek, template matching.
1.
PENDAHULUAN
Sistem yang dapat mendeteksi orang tergeletak dapat sangat bermanfaat untuk memberi peringatan dini pada saat seseorang tergeletak. Hal ini berguna untuk mencegah timbulnya dampak lebih buruk bagi orang tergeletak tersebut. Salah satu contoh penerapan sistem seperti ini adalah peringatan dini adanya seorang manula yang tergeletak di panti jompo. Pada contoh tersebut, pendeteksian dini adanya seorang manula yang tergeletak dapat merupakan permasalahan antara hidup dan mati bagi manula tersebut (Wang, dkk., 2011).
Beberapa cara telah dikembangkan untuk mendeteksi orang tergeletak. Salah satu cara yang telah dikembangkan yaitu dengan menggunakan pendeteksi orang tergeletak menggunakan akselerometer dan/atau gyroscope (Liyanage, 2008 dan Willems, 2009). Kendati telah dikembangkan dalam berbagai desain yang stylish dan nyaman, masih terdapat kelemahan yang menjadi masalah dari penggunaan pendeteksi orang tergeletak jenis ini, karena pendekatan ini mengharuskan pengguna untuk selalu membawa atau memasangnya di badan agar pendeteksian dapat bekerja (Liyanage, 2008). Hal ini akan tidak efektif bagi pengguna yang lupa/lalai membawa alat tersebut. Cara lain yang telah dikembangkan adalah dengan menggunakan sensor akustik, yang mampu mengenali bunyi orang terjatuh (Perry, dkk., 2009). Penggunaan kamera juga merupakan salah satu alternatif yang dapat digunakan dalam pengembangan sistem pendeteksi orang tergeletak (Perry, dkk.,
2009). Pendeteksi orang tergeletak berbasis kamera menjadi alternatif yang dapat digunakan karena tidak memerlukan alat yang terpasang ke badan.
Pada tulisan ini, penulis merancang-bangun prototip suatu sistem pendeteksian orang tergeletak menggunakan sebuah kamera pengawas sebagai devais masukan citra, selanjutnya diolah dengan metode background subtraction (Porikli, 2005 dan Piccardi, 2004), thresholding (Jain, 1989), median filtering (Gonzalez, 2008), hole-filling (Gonzalez, 2008), segmentasi objek (Maillet dkk., 2000) dan template matching (Theodoridis dkk., 2009, Brunelli, 2009 dan Jurie dkk., 2002). Pendeteksi orang tergeletak yang dirancang berfungsi sebagai sistem peringatan dini untuk orang tergeletak, mulai dari mendeteksi keberadaan orang tergeletak dan kemudian meneruskan informasi tersebut kepada orang lain yang berkepentingan (misalnya dokter atau perawat) di sekitar lokasi tersebut. Template matching dipilih sebagai metode pendeteksian orang tergeletak karena metode ini merupakan salah satu cara yang dapat digunakan dalam aplikasi pendeteksian objek (Brunelli, 2009).
Pada bagian 2 dari tulisan ini membahas prototip sistem yang dirancang-bangun, bagian 3 membahas pengujian kinerja sistem dan bagian 4 berisi kesimpulan.
2.
PERANCANGAN SISTEM
Sistem pendeteksi orang tergeletak ini menggunakan kamera pengawas yang terpasang tetap pada bagian atas ruangan (sudut pandang, letak dan ketinggian pemasangan sudah diatur). Citra yang ditangkap kamera pengawas diolah menggunakan enam metode secara berurutan, seperti ditunjukkan pada Gambar 1.
2.1
Background Subtraction
Background Subtraction
Thresholding
Median Filtering
Hole Filling
Segmentasi Objek
Template Matching
Citra Masukan
Hasil Deteksi Citra Background
Gambar 1. Diagram Kotak Sistem
(a) (b)
(c)
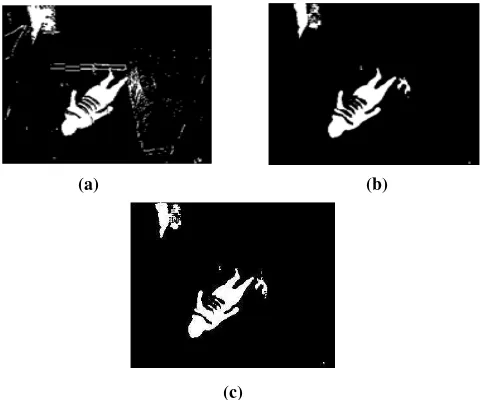
Gambar 2. Background subtraction: (a) citra background B,
(b) frame masukan kamera F(n), (c) citra selisih S(n)
2.2
Thresholding
Thresholding pada sistem yang dirancang digunakan untuk mengubah citra berwarna atau citra grayscale menjadi citra biner atau citra yang hanya memiliki dua macam nilai piksel, yaitu 0 untuk hitam dan 1 untuk putih (Gonzalez, 2008). Pada metode thresholding, piksel yang memiliki nilai keabuan lebih kecil dari ambang thresholding yang ditentukan (tb) akan
diberikan nilai 0, sementara piksel yang memiliki nilai keabuan yang lebih besar dari ambang thresholding (tb) akan diubah
menjadi bernilai 1. Thresholding pada sistem ini dilakukan dengan cara mengubah daerah citra yang terdeteksi sebagai obyek menjadi warna putih dan daerah citra yang terdeteksi sebagai bukan obyek menjadi warna hitam seperti yang ditunjukkan pada Gambar 3a.
(a) (b)
(c)
Gambar 3. Contoh hasil keluaran thresholding, median
filtering dan hole-filling : (a) citra hasil thresholding dari
citra selisih, (b) citra hasil median filtering dari (a), (c) citra
hasil hole-filling dari (b).
2.3
Median Filtering
Median filter adalah salah satu filter non-linear yang banyak digunakan untuk memperhalus dan mengurangi derau pada citra (derau pada sistem yang dirancang berbentuk bintik putih). Timbulnya derau pada suatu citra dapat disebabkan oleh pencahayaan, suhu, transmisi data atau jenis kamera yang berbeda (Gonzalez, 2008). Secara matematis, median filtering dapat dirumuskan pada persamaan berikut :
,
,
, ,
g x y Median f x i y j i j w (2) dimana g(x,y) merupakan citra yang dihasilkan dari citra f(x,y) dengan w sebagai window yang ditempatkan pada bidang citra dan (i, j) elemen dari window tersebut. Hasil proses median filtering ditunjukkan pada Gambar 3b.
2.4
Pengisian Lubang (Hole-Filling)
Algoritma hole-filling disebut juga dilasi bersyarat (conditional dilation) (Gonzalez, 2008). Persamaan hole-filling ini tercantum pada Persamaan (3). Algoritma ini digunakan untuk mengisi lubang (hole) yang terletak di dalam objek dengan melakukan dilasi pada piksel yang berada dalam batas-batas tepian objek. Hole pada citra biner didefinisikan sebagai daerah background citra yang dikelilingi oleh tepi-tepi dari objek dalam citra (Gonzalez, 2008).
1
c
k k
X X B A k = 1,2,3,.. (3) dimana B merupakan structuring element berbentuk bujursangkar berukuran 3×3 pixel, A merupakan citra masukan dengan objek berlubang dan Xkadalah keluaran proses pada
iterasi ke-k. Hasil proses hole-filling ditunjukkan pada Gambar 3c.
2.5
Segmentasi Objek
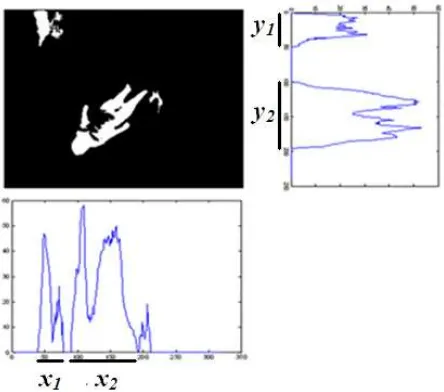
maupun horisontal (x1 & x2 pada proyeksi horisontal dan y1 &
y2 pada proyeksi vertikal). Proyeksi terlebar (x2 & y2 untuk
contoh pada Gambar 3) dipilih untuk menjadi batas segmentasi objek yang akan diproses lebih lanjut pada metode template matching.
Gambar 4. Proyeksi jumlah titik putih secara vertikal dan horisontal
2.6
Template Matching (Pendeteksian Orang
Tergeletak)
Template matching digunakan sebagai metode pendeteksian keberadaan orang tergeletak dalam ruangan. Pada template matching ini digunakan dataset citra template posisi orang tergeletak untuk dicari nilai korelasi silangnya dengan citra objek yang didapat dari bagian segmentasi objek.
Dataset citra template dihasilkan dari pengolahan dataset citra posisi tergeletak (contoh pada seperti Gambar 5) yang diperoleh dari dari 30 responden (15 pria dan 15 wanita). Perincian dataset tersebut dapat dilihat pada Tabel 1. Kriteria untuk orang yang menjadi responden pembuatan dataset citra posisi tergeletak ini merupakan orang yang memiliki tinggi badan minimal 150 cm dan maksimal 180 cm, dengan Indeks Massa Tubuh (IMT) kategori normal = 18,5 – 24,99 (kg/m2) (WHO,
2012). Pembuatan dataset citra posisi tergeletak ini dilakukan dalam kondisi pencahayaan yang cukup.
Gambar 5. Enam macam posisi orang tergeletak (dari kiri ke kanan): telungkup, telentang, tergeletak menghadap ke kiri, tergeletak menghadap ke kanan, telungkup dengan variasi posisi tangan, telentang dengan variasi posisi tangan.
Dataset citra posisi tergeletak di atas akan diolah menjadi dataset citra template untuk digunakan oleh sistem. Setiap citra pada dataset citra posisi tergeletak ini diolah melalui metode background subtraction beserta thresholding, median filtering, hole-filling (pengisian lubang) seperti yang dijelaskan pada bagian 2.1 sampai dengan 2.4, kemudian objek dari hasil citra yang didapat akan diambil melalui cropping untuk mendapatkan template bentuk posisi tergeletak orang yang ada
dalam setiap citra. Contoh citra template dapat dilihat pada Gambar 6.
Gambar 6. Contoh template yang ada dalam dataset citra
template.
Tabel 1. Jenis, Variasi, dan Jumlah Dataset Template
Jenis Dataset Citra Variasi Jumlah
Citra
Citra posisi telentang 12 360
Citra posisi telungkup 12 360
Citra posisi telentang dengan variasi posisi
tangan 12 360
Citra posisi telungkup dengan variasi
posisi tangan 12 360
Citra posisi tergeletak menghadap ke kiri 12 360 Citra posisi tergeletak menghadap ke
kanan 12 360
Total 2160
Pada sistem ini, nilai korelasi silang antara objek dengan dataset citra template yang ada dihitung melalui Persamaan (4). Semakin besar nilai korelasi antara citra template dan obyek, semakin cocok (match) citra template dengan obyek.
1 10 0
, ( , ) ( , )
j m
s t
c x y w s t O x s y t
(4)Pada persamaan ini, w(s,t) merupakan citra template, O(x+s,y+t) merupakan citra objek dan c(x,y) adalah nilai korelasi kedua citra tersebut pada koordinat (x,y).
Jika nilai korelasi w dan O belum melebihi ambangtergeletak, maka sistem akan melanjutkan perhitungan korelasi antara citra obyek dan citra template selanjutnya. Ketika nilai korelasi w dan O melebihi ambangtergeletak (orang tergeletak terdeteksi), sistem akan menghentikan template matching lalu mengeluarkan bunyi melalui speaker komputer serta menampilkan pesan pada monitor sebagai tanda peringatan agar orang lain di sekitar tempat korban tergeletak dapat mengetahui bahwa ada orang yang tergeletak di ruang yang diawasi.
3.
PENGUJIAN SISTEM
Sistem pendeteksi orang tergeletak direalisasikan dan diuji menggunakan komputer yang menggunakan prosesor Intel Core2Duo 2.93GHz dan memory sebesar 3 GB DDR2. Sistem diuji pada sebuah kamar tidur yang memiliki ukuran (3,5 × 4) meter seperti yang terlihat pada Gambar 2a.
orang tidak tergeletak terdiri dari citra orang berdiri (240 citra), citra orang membungkuk (360 citra), dan citra orang duduk bersila (360 citra). Empat jenis hasil pendeteksian didapatkan dari pengujian sistem, yaitu : Hit, Miss, False Alarm, dan Correct Rejection (Duda, 2001), yang didefinisikan sebagai berikut.
Hit adalah jumlah citra orang tergeletak yang dapat dideteksi dengan benar.
Miss adalah jumlah citra orang tergeletak yang tidak dapat dideteksi.
False Alarm (FA) adalah jumlah citra orang tidak tergeletak yang terdeteksi sebagai citra orang tergeletak.
Correct Rejection (CR) adalah jumlah citra orang tidak tergeletak yang tidak terdeteksi sebagai citra orang tergeletak.
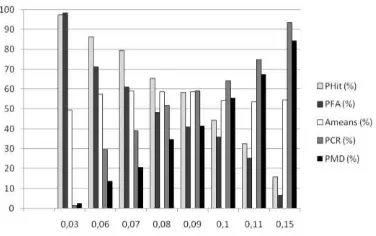
Gambar 7 menunjukkan grafik hasil pengujian sistem dengan berbagai ambang thresholding (tb). Ambang thresholding (tb)
sebesar 0.03 dan 0.06 berturut-turut menghasilkan persentase Hit (PH) yang tinggi sebesar 97.3% dan 86.2%, tetapi
persentase False Alarm (PFA) juga tinggi yaitu sebesar 98.4%
dan 71.3% sehingga dapat dikatakan sistem tidak dapat membedakan pendeteksian orang tergeletak atau orang bukan tergeletak karena hampir semua hasil pendeteksian dianggap tergeletak. Sebaliknya pada tb sebesar 0.15, sistem memberikan
PFA yang rendah sebesar 6.6% dan PH sebesar 15.7% yang juga
menandakan sistem tidak dapat membedakan pendeteksian orang tergeletak dan orang bukan tergeletak, namun dalam hal ini, hampir semua hasil pendeteksian dianggap sebagai tidak tergeletak. Dari hasil ini penulis menyimpulkan bahwa tb
sebesar 0.07 merupakan pilihan terbaik karena menghasilkan Ameans yang paling tinggi serta selisih antara PH dan PFA &
selisih antara persentase Correct Rejection (PCR) dan persentase
Miss (PM) yang lebih tinggi dibandingkan tblain.
Gambar 7. Grafik hasil pengujian perubahan ambang
thresholding pada sistem
Gambar 8 menunjukkan hasil pengujian median filtering dengan tb sebesar 0.07. Dari sini dapat dilihat bahwa semakin
besar ukuran median filter maka PM dan PCR akan semakin
tinggi, sebaliknya PH dan PFA akan semakin rendah. Hal ini
disebabkan oleh bintik putih dan detail objek yang semakin berkurang saat ukuran median filter meningkat. Dari percobaan, diperoleh hasil bahwa detail citra yang buruk terlihat saat digunakan ukuran median filter lebih besar dari 5×5.
Hasil pengujian pengaruh penggunaan hole-filling ditunjukkan pada Gambar 9. Pada pengujian ini digunakan median filter dengan ukuran 5×5. Dari Gambar 9 dapat disimpulkan bahwa
penggunaan hole-filling membuat PH meningkat dibanding
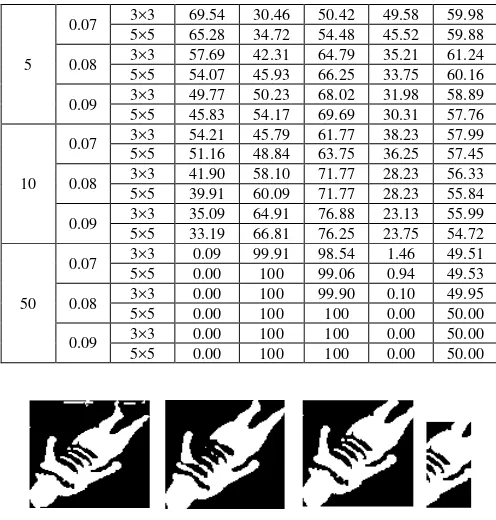
tanpa penggunaan hole-filling karena objek yang didapatkan lebih utuh (seperti ditunjukkan pada Gambar 3b & 3c) sehingga dapat menghasilkan nilai korelasi silang yang lebih tinggi. Berdasarkan pengujian segmentasi objek yang telah dilakukan, terlihat bahwa semakin besar ambang segmentasi (tv) PH dan
PFA akan semakin rendah (seperti ditunjukkan pada Tabel 2).
Hal ini dikarenakan semakin besar ambang segmentasi, detail citra objek semakin berkurang karena terjadi cropping (segmentasi) yang terlalu ketat di sekeliling objek. Hal ini ditunjukkan pada Gambar 10.
Gambar 8. Grafik hasil pengujian pengaruh perubahan
ukuran median filter pada sistem dengan tb = 0,07.
(a)
(b)
Gambar 9. Grafik hasil pengujian metode hole-filling pada
sistem dengan : (a) median filter 5×5 tanpa hole-filling; (b)
median filter 5×5 menggunakan hole-filling.
Tabel 2. Hasil Pengujian Pengaruh Perubahan Ambang
Segmentasi (tv), Ambang Thresholding (tb) dan Ukuran
Median Filter pada Sistem
5
Gambar 10. Contoh citra objek hasil perubahan nilai tv pada
segmentasi objek: (a) tv = 3, (b) tv = 5, (c) tv = 10, (d) tv = 30.
4.
KESIMPULAN
Tulisan ini menyajikan rancang-bangun suatu prototip sistem yang dapat mendeteksi orang tergeletak berbasis sebuah kamera pengawas. Prototip sistem telah diuji dengan melibatkan 30 orang responden dan beberapa kombinasi parameter. Berdasarkan pengujian didapatkan hasil bahwa pendeteksian terbaik (PH 65.28%, PM 34.72%, PCR 54.48%, dan PFA 45.52%)
dihasilkan dari parameter ambang thresholding (tb)dan ambang
segmentasi (tv) berturut-turut sebesar 0.07 dan 5, serta
penggunaan hole-filling dan median filter berukuran 5×5. Dengan parameter yang sama didapat rata-rata aritmetik akurasi sistem (Ameans) sebesar 59.88%. Meskipun nilai akurasi sistem
yang dihasilkan menggunakan kombinasi parameter di atas belum terlalu tinggi, akan tetapi hasil ini masih merupakan hasil yang terbaik dibandingkan kombinasi parameter lainnya, karena kombinasi parameter ini menghasilkan kompromi terbaik antara PHdan PFA. Sistem yang dirancang sering mengalami kesulitan
membedakan antara posisi orang berdiri dan posisi orang tergeletak jika sumbu lateral orang tersebut sejajar dengan sumbu y citra yang dihasilkan kamera. Hal ini disebabkan karena sistem yang dirancang-bangun hanya menggunakan satu buah kamera pengawas. Penggunaan dua buah kamera daerah pandang (field of view) saling tegak lurus dapat mengurangi permasalahan ini.
Sistem yang dirancang-bangun pada makalah ini belum mampu membedakan antara seseorang yang jatuh tergeletak dengan seseorang yang dengan sengaja berbaring di lantai. Oleh karena itu, pada penelitian selanjutnya kami berencana untuk menerapkan pendeteksi gerak misalnya menggunakan algoritma Motion History of Images (MHI). Penerapan algoritma ini akan
memberikan kemampuan sistem membedakan seseorang yang jatuh atau sengaja berbaring berdasarkan perbedaan karakteristik gerakan masing-masing kasus (Bradski, dkk., 2000).
5.
REFERENSI
Bradski, G., dan Davis, J., Motion Segmentation and Pose Recognition with Motion History Gradients, IEEE Workshop on Applications of Computer Vision, Desember 2000.
Brunelli, R., Template Matching Techniques in Computer Vision: Theory and Practice, 1st ed., Wiley, 2009.
Duda, R.O., Hart, P.E dan Stork, D.G., Pattern Classification, 2nd ed., Wiley-Interscience, 2001.
Gonzalez, R. dan Woods, R., Digital Image Processing, 3rd ed.,
Prentice-Hall, New Jersey, 2008.
Jain, A. K., Fundamentals of Digital Image Processing, Prentice-Hall, 1989.
Jurie F. dan Dhome M., Real-Time Robust Template Matching, British Machine Vision Conference (BMVC 2002), Cardiff, Inggris (2-5 September 2002).
Liyanage, C De Silva, Audiovisual Sensing Of Human Movements for Home-Care and Security in a Smart Environment, International Journal On Smart Sensing & Intelligent Systems, Vol. 1, No. 1, Maret 2008, h. 220-245. Maillet, S., dan Sharaiha, Y., Binary Digital Image Processing: A Discrete Approach, 1st ed, Academic Press, London, 2000.
Perry, J.T., Kellog, S., Vaidya, S.M., Youn, J-H., Ali, H., dan Sharif, H., Survey and Evaluation of Real-Time Fall Detection Approaches, 6th International Symposium on High-Capacity
Optical Networks and Enabling Technologies (HONET), Alexandria, Desember 2009, h. 158 – 164.
Piccardi, M., Background subtraction techniques: a review, in Proc. of IEEE SMC 2004 International Conference on Systems, Man and Cybernetics, The Hague, Belanda (Oktober 2004). Porikli, F., Multiplicative Background-Foreground Estimation Under Uncontrolled Illumination using Intrinsic Images, Workshop on Motion and Video Computing, Breckenridge, Colorado (Januari 2005).
Theodoridis, S., dan Koutroumbas, K., Pattern Recognition, 4th
ed., Academic Press, 2009.
Wang, S., Zabir, S., dan Leibe, B., Lying Pose Recognition for Elderly Fall Detection, Proceedings of Robotics: Science and Systems VII, Los Angeles, Amerika Serikat (Juni 2011) Willems, J., How to detect human fall in video? An overview, Positioning and Context-Awareness International Conference (POCA 2009), Antwerp, Belgia (Mei 2009).