DESAIN DAN PROTOTIPE ALAT PEMINDAH BARANG BERDASARKAN WARNA MENGGUNAKAN MIKROKONTROLER ATMEGA32 *) ABSTRAK
Teks penuh
Gambar
Dokumen terkait
Kemudian dengan selesainya Laporan Akhir ini dengan judul, ” Rancang Bangun Alat Penghitung Dan Pemilah Barang Menggunakan Sensor Warna Berbasis Mikrokontroler
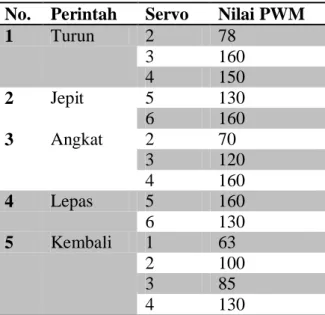
Dof 4 yang di kendalikan melalui servo 4 akan bergerak dari titik 0 derajat menuju titik 60 derajat untuk membuka capit atau gripper untuk mengambil barang.. Selanjutnya dof
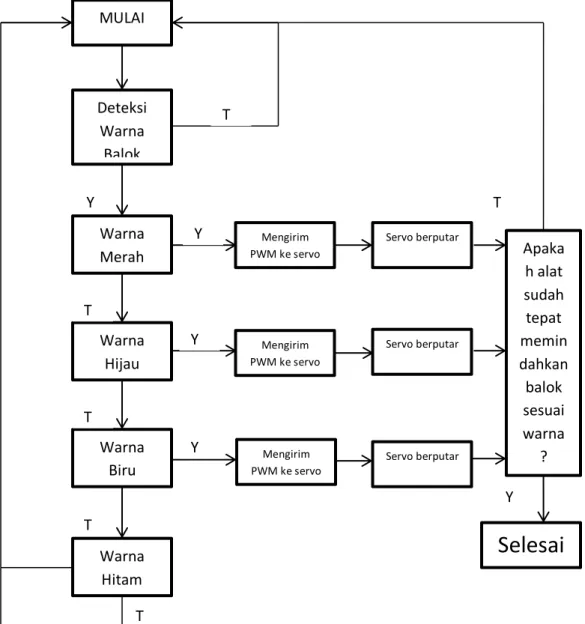
Alat ini akan bekerja dengan menyeleksi warna buah kopi yang merah yang berarti matang dan warna hijau berarti belum matang, pada alat ini dilengkapi dengan
Dengan citra ( bitmap ) yang ditangkap webcam saat barang yang masuk terdeteksi sensor proximity , program flowstone dalam komputer akan mendeteksi warnanya dengan
Penelitian ini adalah untuk merancang suatu alat untuk mendeteksi warna serta nominal uang berbasis arduino uno serta sensor TCS3200 yang memanfaatkan perubahan arus
Teknik Informatika, Fakultas Ilmu Komputer, Universitas Almuslim Abstrak: Pembuatan alat pemisah warna objek yang dapat memindahkan objek warna dari satu tempat ke tempat
Telah dirancang pengolah tampilan dan penyimpan hasil alat timbang berbasis serat optik menggunakan mikrokontroler ATmega32. Alat timbang ini dapat menampilkan beban
Dari penelitian yang telah dilakukan, dengan mikrokontroler Atmega32 dapat dirancang suatu alat yang dapat digunakan sebagai alat timbang beban menggunakan
