LAPORAN PRAKTIKUM SISTEM KONTROL
MODEL MATEMATIKA DAN RESPON PADA RANGKAIAN LISTRIK
Dosen Pembimbing : Ahmad Fahriannur, ST, MT
Disusun Oleh : Kelompok 3/Gol.A
1. Silfia Juliana Ingi Kollyn (B42120211) 2. Akhmad Firdaus Andre Vahlefi (B42120303) 3. Bony Ardela Dionanda (B52120304)
a. Mampu membuat bentuk model matematika dari rangkaian listrik b. Mampu menganalisis respon sistem ketika diberi sinyal input C. Dasar Teori
a. Dasar-Dasar Sistem Kontrol
Sistem kontrol merupakan hal penting di dunia industri dan di era teknologi informasi saat ini. Proses produksi dan manufacturing dituntut kestabilannya dan setiap perubahan dapat direspon secara cepat dan real time. Hal ini karena adanya tuntutan kualitas produk dan proses yang konsisten dari pasar dan dunia industri itu sendiri. Contoh sistem control industri seperti pengontrolan variabel-variabel temperatur (temperature), tekanan (pressure), aliran (flow), level (level), dan kecepatan (speed). Variabel-variabel ini adalan parameter-parameter keluaran (output) yang harus dijaga tetap sesuai dengan keinginan yang telah ditetapkan terlebih dahulu oleh operator yang disebut dengan setpoint/set value (SV) sementara nilai actual proses disebut Process Value (PV). Sistem yang dikontrol (bangunan) agar variabel keluaran dijaga tetap pada kondisi tertentu disebut dengan plant.
Implementasi teknik sistem kontrol (System Control Engineering) melibatkan multidisiplin ilmu seperti bidang: teknik mesin (mechanical engineering), teknik elektrik (electrical engineering), elektronik (electronics) dll dimana kolariborasi keilmuan tersebut lazim disebut Mekatronika (Mechatronics).
Sistem kontrol berdasarkan aliran sinyal control dibagi atas dua: 1. Sistem kontrol secara manual (Open Loop Controls).
Sistem kontrol secara manual, proses pengaturannya dilakukan secara manual oleh operator dengan mengamati keluaran secara visual, kemudian dilakukan koreksi variabel-variabel kontrolnya untuk mempertahankan hasil keluarannya. Sistem kontrol itu sendiri bekerjanya secara open loop, artinya sistem kontrol tidak dapat melakukan koreksi variabel untuk mempertahankan hasil keluarannya. Perubahan ini dilakukan secara manual oleh operator setelah mengamati hasil keluarannya melalui alat ukur atau indikator.
2. Sistem Kontrol otomatis (Closed Loop Controls)
umpan balik (feedback) dari hasil keluaran menuju ke masukan setelah dikurangkan dengan nilai setpointnya. Pengaturan secara untai tertutup ini (closed loop controls), tidak memerlukan operator untuk melakukan koreksi variabel-variabel kontrolnya karena dilakukan secara otomatis dalam sistem kontrol dalam sistem kontrol itu sendiri. Dengan demikian keluaran akan selalu dipertahankan berada pada kondisi stabil sesuai dengan setpoint yang ditentukan. Kebutuhan dalam Sistem Kontrol Otomatis
Terdapat tiga alasan utama, mengapa plant proses atau bangunan memerlukan kontrol secara otomatis :
a. Keamanan (Safety). Pada kondisi kompleksitas yang tinggi atau plant/proses yang berbahaya, pada akhirnya dibutuhkan kontrol otomatis dan protokol untuk menjaga keamanan.
b. Stabilitas (Stability). Plant atau proses harus bekerja secara mantap (steadily), dapat diprediksi (predictably) dan keterulangan (repeatably), tanpa fluktuasi atau kegagalan yang tidak terencana.
c. Ketelitian (Accuracy)
Hal ini utamanya diperlukan dalam industri dan ini adalah suatu kebutuhan utama dalam pabrik-pabrik dan bangunan untuk mencegah produksi cacat, untuk menaikkan mutu dan tingkat produksi, dan memelihara kenyamanan. Ini adalah pokok dari efisiensi secara ekonomis.
Contoh Sederhana Sistem Kontrol
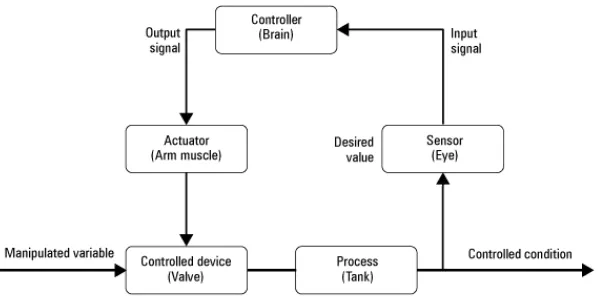
Gambar 1. Model Sistem Kontrol Sederhana (manual control system) Contoh proses yang diperlihatkan dalam gambar di atas, operator mengoperasikan secara manual (dengan tangan) agar membuat variasi aliran air melalui variasi pembukaan atau penutupan Klep Masukan untuk memastikan bahwa :
Permukaan air tidaklah terlalu tinggi; atau dijalankan dengan membuang sampah melalui pelimpah.
Permukaan air tidaklah terlalu rendah; atau tidak sampai pada bagian dasar dari tangki.
Hasil dari sistem kontrol ini adalah air keluar dari tangki pada tingkat rate yang berada pada daerah cakupan yang diperlukan. Jika air keluar pada rate terlalu tinggi atau rendah, proses pengaliran air melalui klep masukan dikatakan tidak beroperasi secara benar. Pada kondisi awal, klep pengosongan pada pipa produk akhir berada pada posisi yang tetap. Pada contoh sistem kontrol dalam Gambar 1 di atas akan mendemontrasikan bahwa :
1. Operator mengarahkan untuk menjaga kondisi air didalam tangki melalui klep masukan agar berada pada level antara 1 dan 2. Level permukaan air pada kondisi tersebut disebut sebagai Kondisi Terkontrol (Controlled Condition).
3. Air itu sendiri disebut sebagai Agen Kontrol (Control Agent).
4. Pengendalian aliran air kedalam tangki, maka level air akan berubah. Perubahan level air dalam tangki dikenal sebagai Variabel Kontrol (Controlled Variable).
5. Sedangkan air dalam tangki dikenal sebagai Media Terkontrol (Controlled Medium).
6. Level air diusahakan dipelihara yang dapat dilihat pada indikator secara visual disebut sebagai Setpoint (Set Point atau Set Value).
7. Level air yang dipelihara pada titik diantara 1 dan 2 yang terlihat pada indikator secara visual dan parameter kontrol masih diperkenankan yaitu berada sedikit diatas dasar tangki dan tidak melimpah. Nilai pada daerah ini disebut sebagai Nilai yang diinginkan (Desired Value).
8. Diasumsikan bahwa level dirawat secara ketat agar berada pada titik antara 1 dan 2. Level air ini berada pada keadaan Mantap (Steady State), dikenal sebagai Nilai Kontrol (Control Value) atau Nilai Nyata (Actual Value).
Catatan: Melihat pada point 7 dan 8 di atas, level air secara ideal dipelihara pada titik 3. Tetapi pada kenyataannya level akan berada diantara 1 dan 2, namun masih bekerja dengan baik. Perbedaan antara Setpoint dan Nilai Nyata disebut sebagai Deviasi (Deviation).
9. Jika klep masukan ditutup pada posisi baru, level air dalam tangki akan menurun dan deviasi akan berubah. Ayunan deviasi (Sustained Deviation) ini disebut sebagai Offset.
Elemen-elemen kontrol otomatis
Gambar 2. Elemen-elemen dari sistem kontrol otomatis
Dari Gambar 1 di atas terdapat elemen-elemen kontrol seperti yang diperlihatkan dalam Gambar 2. Elemen-elemen kontrol tersebut adalah:
Mata operator mendeteksi adanya pergerakan level air melalui skala yang telah ditandai terlebih dahulu. Mata operator dikatakan sebagai Sensor. Sinyal dari mata (sensor) menuju ke otak, yang mana akan mengetahui
adanya deviasi. Otak dapat dikatakan sebagai Kontroler (Controller). Arm Muscle (Lengan dari klep masukan) dan tangan (aktuator, actuator)
memutar klep, disebut sebagai Perangkat Pengontrol (Controlled Device). Cara penjelasan yang berbeda diperlihatkan kempbali dalam Gambar 2, sebagai penjelasan dari Gambar 1 yaitu :
Secara sederhana operator dalam Gambar 1 akan menahan air dalam tangki pada kondisi level yang telah didefinisikan atau ditentukan. Level 3 dapat disebut sebagai target dari operator atau disebut sebagai Setpoint.
Besarnya kesalahan (error) atau perbedaan antara setpoint dan nilai nyata disebut sebagai deviasi. Jika deviasi konstan atau disebut kondisi matap, hal ini disebut sebagai Ayunan Deviasi atau Ofset.
Operator memanipulasi level air, pada akhirnya diarahkan untuk menghasilkan keluaran, pada kasus ini, adalah sebuah kebutuhan aliran air yang keluar dari tangki.
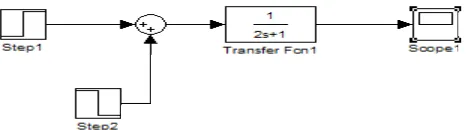
b. Rangkaian RC dan Rumus a. Rangkaian 1
b. Rangkaian 2
D. Langkah Percobaan a. Percobaan 1
1. Gunakan instruksi pemrograman matlab dari persamaan 1 jika nilai R = 2
, nilai kapasitor (C) = 1F dan V1 sinyal step.
2. Tampilkan gambar grafik respon sistem 3. Ulangi langkah 1 dan 2 ketika nilai R :
R = 2, C = 5 F R = 2, C = 0,1 F
4. Ulangi langkah 1 dan 2 dengan sinyal input V1 adalah sinyal impulse
1. Gunakan instruksi pemrograman matlab dari persamaan 2 jika nilai R = 2
, nilai L = 0.5 H, nilai C = 0.5 F dan V1 sinyal step.
2. Gambarkan grafik respon sistem 3. Ulangi langkah 1 dan 2 jika R adalah :
R = 1, C = 0.5F, L = 0.5H R = 3, C = 0.5 F, L = 0,5 H
4. Ulangi langkah 1 dan 2 dengan sinyal input V1 adalah sinyal impulse
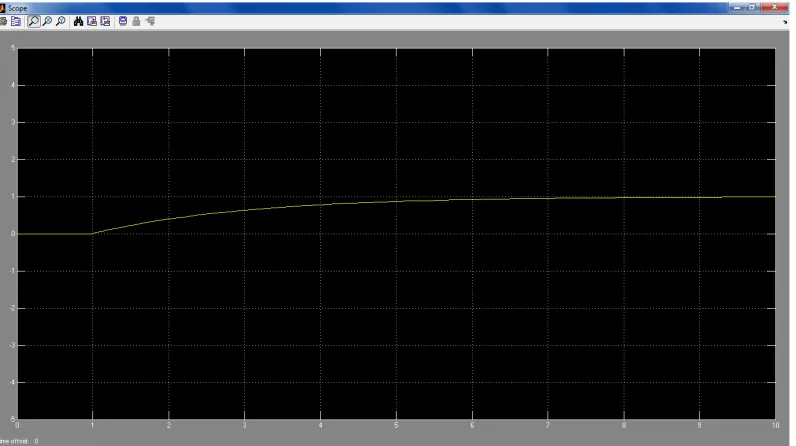
E. Analisa Percobaan dan Pembahasan a. Langkah 1 percobaan 1
Gambar 2. Grafik langkah 1 perbesaran
Gambar 3. Fungsi grafik
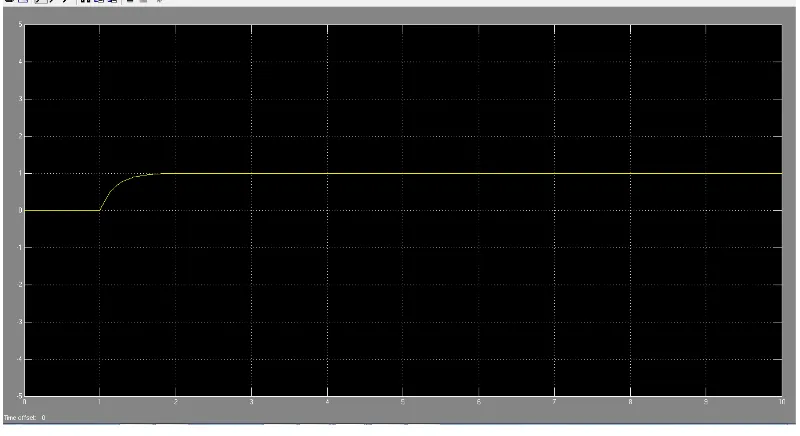
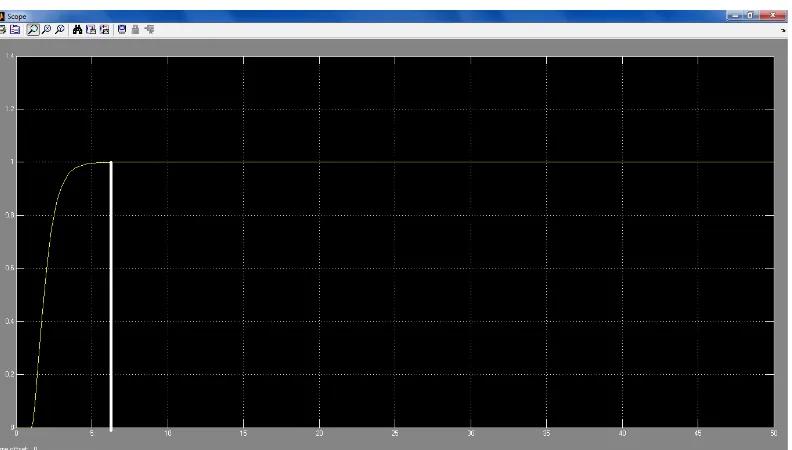
Pada langkah 1 percobaan 1 terlihat grafik yang terbentuk seperti gambar
diatas gambar yang pertama grafik respon dari fungsi s yaitu . Pada gambar
kedua grafik telah dipebesar dan bagian yang diberi tanda warna putih yaitu titik ketika grafik mulai berada pada posisi stabil yaitu pada angka 12.4
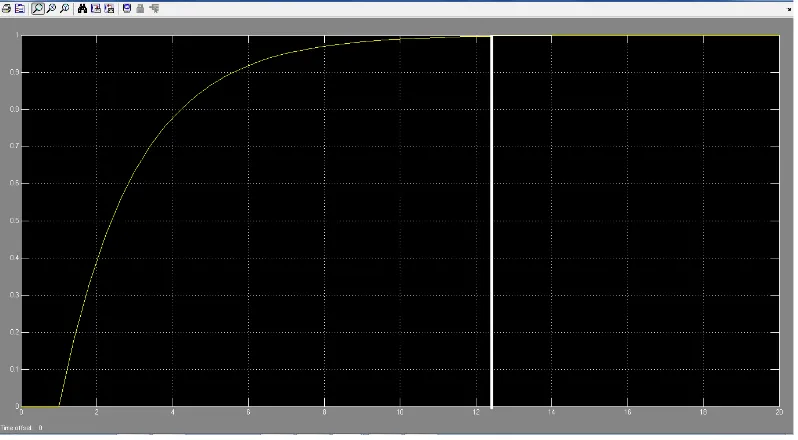
Gambar 4. Fungsi grafik
Gambar 6. Grafik respon langkah 2a perbesaran
Pada gambar grafik diatas menunjukkan respon grafik dari fungsi .
Grafik responnya terlihat hampir sama dengan grafik respon pada fungsi sebelumnya hanya berbeda pada angka start dan pada saat respon menunjukkan angka kestabilan pada titik 65
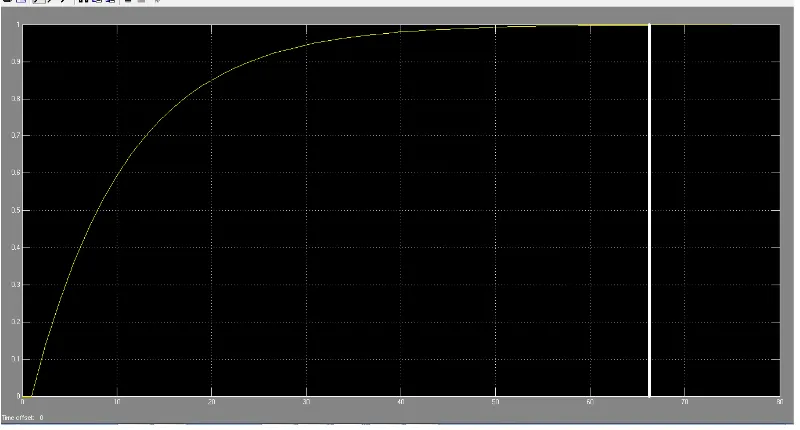
c. Langkah 2b percobaan 1
Gambar 7. Fungsi
Gambar 8. Grafik respon langkah 3b
Gambar 9. Grafik respon langkah 3b perbesaar
Pada grafik repon dengan fungsi terlihat seperti gambar diatas, garis
d. Sinyal impulse
Gambar 10. Rumus fungsi s sinyal impulse
Gambar 12. Sinyal impulse percobaan 1 dengan perbesaran
Sinyal impulse yaitu penggabungan atau penjumlahan dari dua sinyal step dengan mengubah format pada masing-masing step. Untuk sinyal step 1 nilai step time, initial value dan final value adalah 1,0,1 sedangkan untuk step dua yaitu 3,1,0. Pada grafik diatas dapat dilihat responnya ketika kedua sinyal ditambahkan
dengan fungsi s yaitu . Pada gambar 12 ketika dibesarkan grafik responnya
terlihat seperti gambar 12 dengan nilai ketika respon sudah mencapai posisi stabil pada titik ke 15.4
e. Langkah 1 percobaan 2
Gambar 14. Grafik respon langkah 1 percobaan 2
Gambar 15. Grafik respon langkah 1 percobaan 2 diperbesar
f. Langkah 2a percobaan 2
Gambar 16. Rumus fungsi s
Gambar 18. Grafik respon langkah 2a percobaan 2 diperbesar
Grafik respon diatas memiliki fungsi s seperti pada gambar 16. Pada gambar 18 grafik respon diperbesar dan diberi tanda pada saat sinyal respon berada di posisis stabil yaitu pada titik 9.5
g. Langkah 2b percobaan 2
Gambar 20. Grafik respon langkah 2b percobaan 2
Gambar 21. Grafik respon langkah 2b diperbesar Pada grafik respon 2b diatas dapat dilihat bahwa respon mengalami kestabilan pada titik ke 10.5
h. Sinyal impulse percobaan 2
Gambar 23. Grafik respon sinyal impulse percobaan 2
Gambar 24. Sinyal impulse percobaan 2 diperbesar
Penngaturan pada step 1 dan step 2 untuk sinyal impulse pada percobaan 2 sama dengan percobaan 1. Pada grafik diatas dilihat bahwa respon sudah stabil pada titik ke 36.4
Pada percobaan 1 terdapat 3 grafik respon sinyal dengan masing-masing grafik memiliki nilai C yang berbeda akan tetapi memiliki nilai R yang sama, datanya sebagai berikut :
Langkah 1 : R = 2, C = 1F Langkah 2 : R = 2, C = 0.5F Langkah 3 : R = 2, C = 0.1F
Dari ketiga data diatas setelah diaplikasikan ke matlab untuk mengetahui cepat atau lambat suatu fungsi s berada pada posisi stabil langkah yang ke tiga yang memiliki respon yang cepat untuk mencapai titik stabil yaitu pada titik ke 2.35 dan yang paling lambat responnya untuk mencapai titik stabil yaitu pada langkah ke dua dengan nilai ketika berada di posisi stabil yaitu 65.
b. Percobaan 2
Pada percobaan 2 juga dilakukan sama seperti pada percobaan 1. Pada percobaan 2 nilai R pada setiap grafik yang dirubah dan nilai C nya tetap, datanya sebagai berikut :
Langkah 1 : R = 2, C = 0.5F Langkah 2 : R = 1, C = 0.5F Langkah 3 : R = 3, C = 0.5F
Grafik yang mengalami respon paling cepat yaitu grafik yang berada pada langkah ke dua. Pada langkah ke dua grafik respon sinyal sudah stabil pada titik 5.6 dengan nilai R = 1 dan C = 0.5F.
Dari kedua percobaan diatas dapat disimpulkan bahwa nilai R dan C pada suatu fungsi atau persamaan memiliki pengaruh terhadap cepat atau lambat respon suatu sinyal pada grafik untuk mencapai pada titik stabil. Dari data diatas dapat dilihat bahwa apabila nilai R dan C dikalikan maka hasil yang paling kecil akan memiliki nilai respon yang lebih cepat.