BAB II
LANDASAN TEORI
2.1 Definisi Sistem Kendali
Menurut Katsuhiko Ogata, 1993, dalam bukunya yang berjudul Teknik Kontrol Automatik : „Sistem adalah kombinasi dari beberapa komponen yang bekerja bersama-sama dan melakukan suatu sasaran tertentu‟. Sehingga sistem kendali dapat didefinisikan sebagai kumpulan komponen fisik yang tersusun sedemikian rupa dan saling bekerja sama untuk mencapai suatu kondisi yang diharapkan.
Sistem kendali secara umum terbagi dua menurut jenisnya yaitu bersifat terbuka (open loop) dan tertutup (close loop). (Norman S Nise. Control System Engineering 4th Edition., 2004). Gambar diagram blok sistem kendali terbuka dan tertutup dapat dilihat pada Gambar 2.1 dibawah ini.
Controller Actuator
Sensor Set-Point
Process
Controller Actuator Process
Set-Point
(a)
(b)
Gambar 2.1 Diagra m blok sistem kendali secara umu m, (a ) sistem kendali terbuka ,
(b) sistem kendali tertutup.
Sumber : Sistem Kendali Umpan Balik - Ku liah 1, (http://paparisa.unpatti.ac.id), 2012 Pada sistem kendali terbuka, pengendali (controller) harus memberikan sinyal ke aktuator sesuai nilai masukan (set-point). Kelemahan dari sistem kendali terbuka adalah pengendali tidak mengetahui sebenarnya apakah aktuator telah melaksanakan apa yang harus dilaksanaan sehingga apabila terjadi sesuatu gangguan pada proses maka sistem tidak memperbaiki proses secara otomatis. Pada sistem kendali tertutup, pengendali mengetahui kondisi sebenarnya dari
proses dari perbedaan kondisi proses (yang diberi tahu oleh sensor) dengan nilai
set-point sehingga apabila dalam proses terjadi gangguan maka pengendali akan
memperbaiki proses dengan memberi sinyal ke aktuator yang sesuai perhitungan. Sistem kendali dapat diterapkan pada suatu sistem yang berfungsi mengambil data-data terukur dari lapangan yang dimasukkan kedalam pusat pemroses data-data masukan lalu pusat pemroses data tersebut menghasilkan nilai keluaran untuk kendali di lapangan sehingga diharapkan nilai keluaran sistem dapat ideal atau sesuai harapan. Sistem kendali dapat berupa komputer sebagai pusat pengolah data dan penampil data sehingga data-data di lapangan dapat lebih mudah dimengerti oleh manusia dan dapat dikendalikan jarak jauh melalui saluran komunikasi jarak jauh.
2.2 Mikrokontroler ATmega64 dan ATmega16
Mikrokontroler merupakan sebuah IC (Integrated Circuit) sistem komputer yang seluruh atau sebagian elemen komputer di masukkan dalam sebuah IC sehingga dapat disebut single chip microcomputer. Mikrokontroler dibuat oleh banyak perusahaan pembuat IC seperti Atmel, Microchip, PIC, dan Intel yang masing- masing mempunyai spesifikasi dan kompatibilitas yang berbeda-beda baik dari segi pemogrammannya dan perangkat keras yang tertanam didalamnya.
Mikrokontroler ATmega64 dan ATmega16 termasuk keluarga AVR-Mega (Alf and vegard‟s Risc Processor) buatan Atmel yang berbasis arsitektur RISC
(Reduced Instruction Set Computer). RISC adalah suatu jenis arsitektur prosessor
yang melakukan hampir semua instruksi dalam satu pulsa (clock) sehingga waktu untuk mengeksekusi satu instruksi program sangat cepat dan tergantung frekuensi
clock yang diberikan.
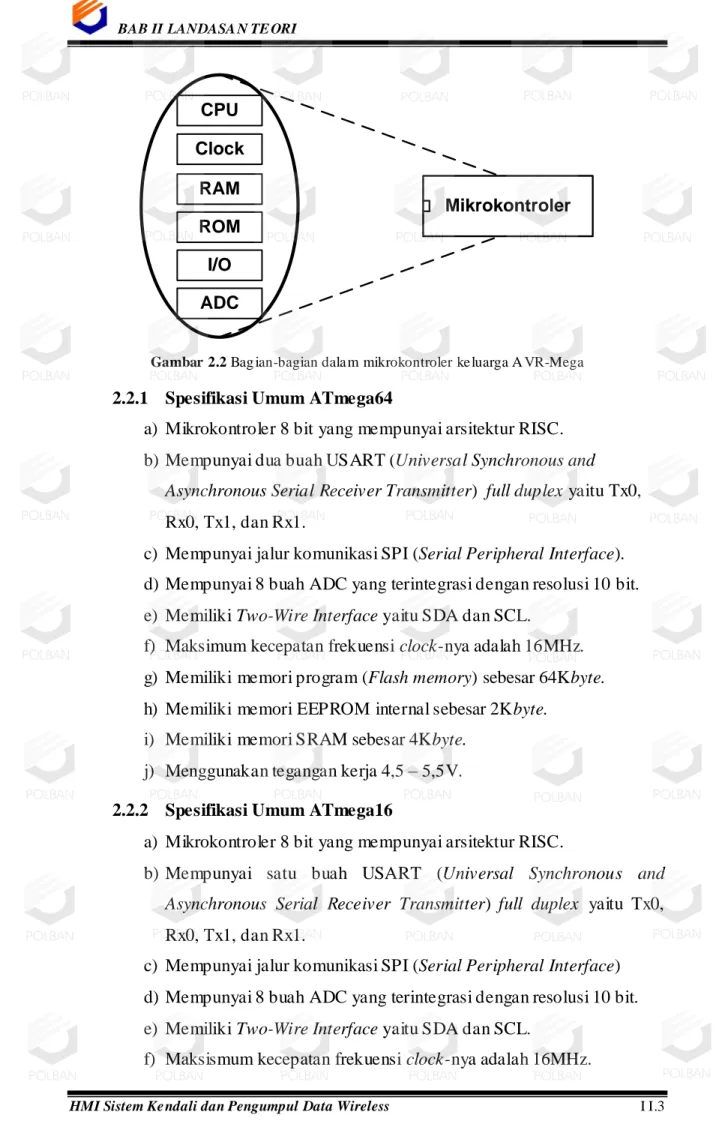
Mikrokontroler ATmega64 dan ATmega16 termasuk dalam keluarga mikrokontroler AVR-Mega buatan Atmel. Gambar 2.2 adalah bagian-bagian dalam mikrokontroler keluarga ATmega.
CPU RAM ROM I/O Clock ADC Mikrokontroler
Gambar 2.2 Bag ian-bagian dala m mikrokontroler ke luarga A VR-Mega 2.2.1 Spesifikasi Umum ATmega64
a) Mikrokontroler 8 bit yang mempunyai arsitektur RISC. b) Mempunyai dua buah USART (Universal Synchronous and
Asynchronous Serial Receiver Transmitter) full duplex yaitu Tx0,
Rx0, Tx1, dan Rx1.
c) Mempunyai jalur komunikasi SPI (Serial Peripheral Interface). d) Mempunyai 8 buah ADC yang terintegrasi dengan resolusi 10 bit. e) Memiliki Two-Wire Interface yaitu SDA dan SCL.
f) Maksimum kecepatan frekuensi clock-nya adalah 16MHz. g) Memiliki memori program (Flash memory) sebesar 64Kbyte. h) Memiliki memori EEPROM internal sebesar 2Kbyte.
i) Memiliki memori SRAM sebesar 4Kbyte. j) Menggunakan tegangan kerja 4,5 – 5,5V. 2.2.2 Spesifikasi Umum ATmega16
a) Mikrokontroler 8 bit yang mempunyai arsitektur RISC.
b) Mempunyai satu buah USART (Universal Synchronous and
Asynchronous Serial Receiver Transmitter) full duplex yaitu Tx0,
Rx0, Tx1, dan Rx1.
c) Mempunyai jalur komunikasi SPI (Serial Peripheral Interface) d) Mempunyai 8 buah ADC yang terintegrasi dengan resolusi 10 bit. e) Memiliki Two-Wire Interface yaitu SDA dan SCL.
f) Maksismum kecepatan frekuensi clock-nya adalah 16MHz.
g) Memiliki memori program (Flash memory) sebesar 16Kbyte. h) Memiliki memori EEPROM internal sebesar 512 byte. i) Memiliki memori SRAM sebesar 1Kbyte.
j) Menggunakan tegangan operasi 4,5 – 5,5V.
ADC (Analog to Digital Converter) pada ATmega16 dibangun dari
successive approximation ADC yang mempunyai resolusi 10 bit. Didalam
ATmega16 terdapat 8 jalur masukan untuk ADC yang dapat diaktifkan semuanya. ADC tersebut dapat dikonfigurasi secara single ended input atau
differential input. Selain itu, ADC ATmega16 mempunyai keakurasian
pembacaan mencapai +/- 2 LSB, maksimum kecepatan pengambilan sampel yaitu 15kSPS (15000 sampel per detik), rentang kecepatan konversi satu jalur masukan ADC yaitu 13 – 260us dan rentang tegangan masukan adalah 0V sampai VCC (5V).
Pada ADC modus single ended input nilai desimal hasil dari konversi analog ke digital adalah :
𝐴𝐷𝐶 = 𝑉𝑖𝑛 .1023
𝑉𝑟𝑒𝑓
Vref = Tegangan referensi (5V)
Vin = Tegangan masukan
ADC = Nilai desimal hasil konversi ADC
USART (Universal Synchronous and Asynchronous Serial Receiver
Transmitter) pada mikrokontroler merupakan salah satu perangkat
komunikasi mikrokontroler tersebut ke perangkat luar seperti
mikrokontroler lain dan komputer dengan parameter-parameter USART yang telah disamakan antara pengirim dan penerima seperti baud rate, stop
bit, dan parity. USART pada ATmega16 dapat digunakan secara
synchronous maupun asynchronous dan dapat digunakan secara half-duplex maupun full-duplex. USART tersebut dapat dikonfigurasi banyak data bit yang digunakan (6,7, atau 8), stop bit (1 atau 2 stop bit), parity (even, odd, atau tidak menggunakan parity). Kecepatan transfer data yang dapat digunakan adalah dari 2400 bps sampai 2 Mbps.
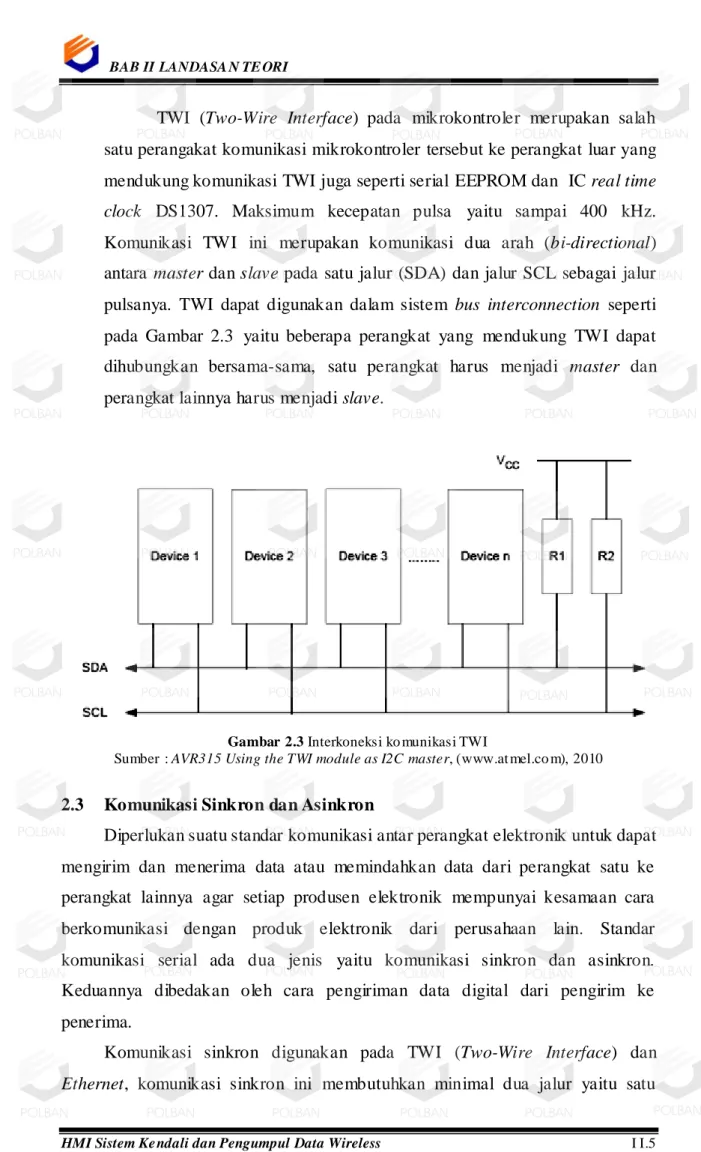
TWI (Two-Wire Interface) pada mikrokontroler merupakan salah satu perangakat komunikasi mikrokontroler tersebut ke perangkat luar yang mendukung komunikasi TWI juga seperti serial EEPROM dan IC real time
clock DS1307. Maksimum kecepatan pulsa yaitu sampai 400 kHz.
Komunikasi TWI ini merupakan komunikasi dua arah (bi-directional) antara master dan slave pada satu jalur (SDA) dan jalur SCL sebagai jalur pulsanya. TWI dapat digunakan dalam sistem bus interconnection seperti pada Gambar 2.3 yaitu beberapa perangkat yang mendukung TWI dapat dihubungkan bersama-sama, satu perangkat harus menjadi master dan perangkat lainnya harus menjadi slave.
Gambar 2.3 Interkoneksi ko munikasi TWI
Sumber : AVR315 Using the TWI module as I2C master, (www.at mel.co m), 2010
2.3 Komunikasi Sinkron dan Asinkron
Diperlukan suatu standar komunikasi antar perangkat elektronik untuk dapat mengirim dan menerima data atau memindahkan data dari perangkat satu ke perangkat lainnya agar setiap produsen elektronik mempunyai kesamaan cara berkomunikasi dengan produk elektronik dari perusahaan lain. Standar komunikasi serial ada dua jenis yaitu komunikasi sinkron dan asinkron. Keduannya dibedakan oleh cara pengiriman data digital dari pengirim ke penerima.
Komunikasi sinkron digunakan pada TWI (Two-Wire Interface) dan
Ethernet, komunikasi sinkron ini membutuhkan minimal dua jalur yaitu satu
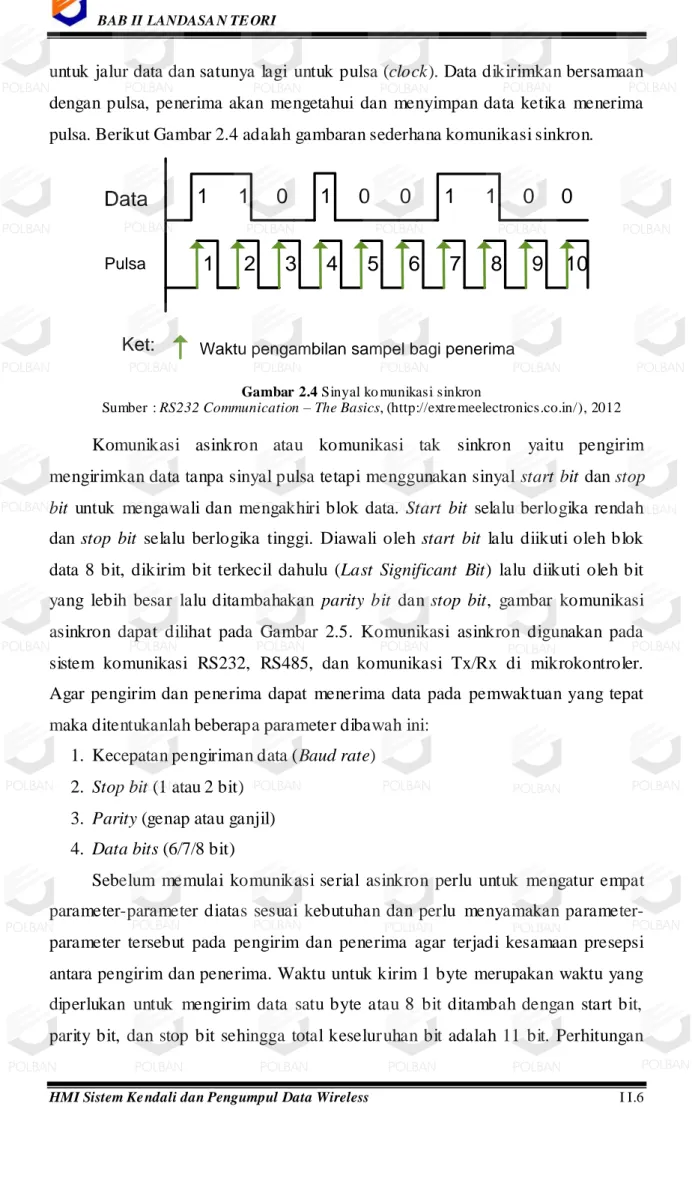
untuk jalur data dan satunya lagi untuk pulsa (clock). Data dikirimkan bersamaan dengan pulsa, penerima akan mengetahui dan menyimpan data ketika menerima pulsa. Berikut Gambar 2.4 adalah gambaran sederhana komunikasi sinkron.
1
1
1
2
3
4
5
6
7
8
9
10
1
1
1
0
0
0
0
0
PulsaData
Waktu pengambilan sampel bagi penerima Ket:
Gambar 2.4 Sinyal ko munikasi sinkron
Sumber : RS232 Communication – The Basics, (http://extre meelectronics.co.in/), 2012 Komunikasi asinkron atau komunikasi tak sinkron yaitu pengirim mengirimkan data tanpa sinyal pulsa tetapi menggunakan sinyal start bit dan stop
bit untuk mengawali dan mengakhiri blok data. Start bit selalu berlogika rendah
dan stop bit selalu berlogika tinggi. Diawali oleh start bit lalu diikuti oleh blok data 8 bit, dikirim bit terkecil dahulu (Last Significant Bit) lalu diikuti oleh bit yang lebih besar lalu ditambahakan parity bit dan stop bit, gambar komunikasi asinkron dapat dilihat pada Gambar 2.5. Komunikasi asinkron digunakan pada sistem komunikasi RS232, RS485, dan komunikasi Tx/Rx di mikrokontroler. Agar pengirim dan penerima dapat menerima data pada pemwaktuan yang tepat maka ditentukanlah beberapa parameter dibawah ini:
1. Kecepatan pengiriman data (Baud rate) 2. Stop bit (1 atau 2 bit)
3. Parity (genap atau ganjil) 4. Data bits (6/7/8 bit)
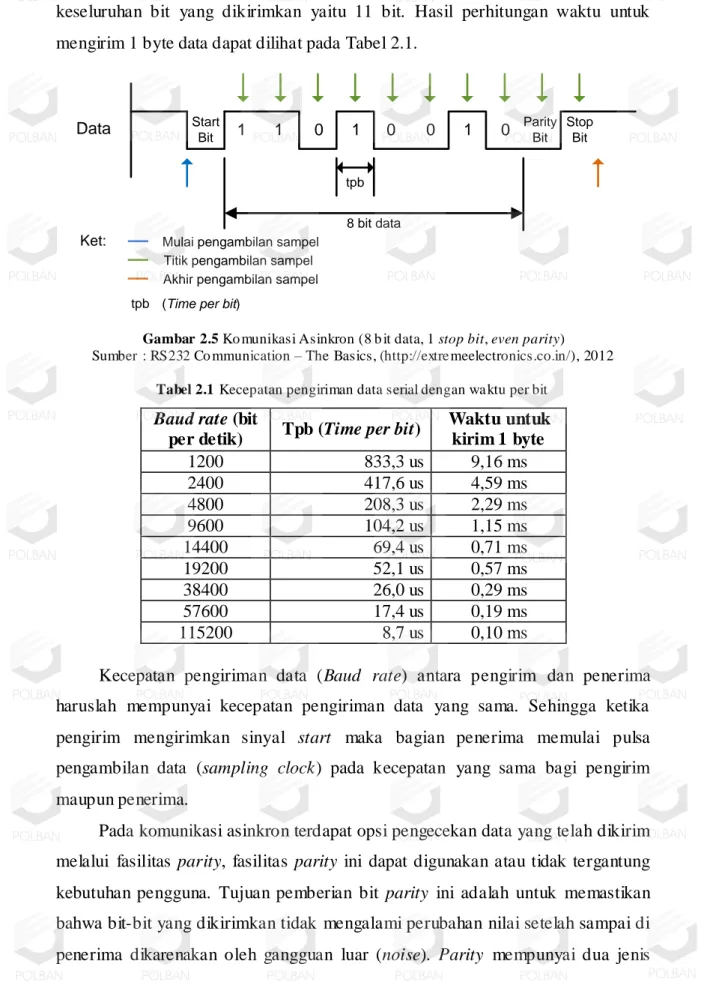
Sebelum memulai komunikasi serial asinkron perlu untuk mengatur empat parameter diatas sesuai kebutuhan dan perlu menyamakan parameter-parameter tersebut pada pengirim dan penerima agar terjadi kesamaan presepsi antara pengirim dan penerima. Waktu untuk kirim 1 byte merupakan waktu yang diperlukan untuk mengirim data satu byte atau 8 bit ditambah dengan start bit, parity bit, dan stop bit sehingga total keseluruhan bit adalah 11 bit. Perhitungan
mendapatkan waktu untuk kirim 1 byte adalah Tpb dikali dengan total keseluruhan bit yang dikirimkan yaitu 11 bit. Hasil perhitungan waktu untuk mengirim 1 byte data dapat dilihat pada Tabel 2.1.
1 0 Data Start Bit Parity Bit 8 bit data Stop Bit 1 1 0 0 1 0
Akhir pengambilan sampel Mulai pengambilan sampel Titik pengambilan sampel
tpb
Ket:
tpb (Time per bit)
Gambar 2.5 Ko munikasi Asinkron (8 b it data, 1 stop bit, even parity)
Sumber : RS232 Co mmunication – The Basics, (http://extre meelectronics.co.in/), 2012
Tabel 2.1 Kecepatan pengiriman data serial dengan wa ktu per bit Baud rate (bit
per detik) Tpb (Time per bit)
Waktu untuk kirim 1 byte 1200 833,3 us 9,16 ms 2400 417,6 us 4,59 ms 4800 208,3 us 2,29 ms 9600 104,2 us 1,15 ms 14400 69,4 us 0,71 ms 19200 52,1 us 0,57 ms 38400 26,0 us 0,29 ms 57600 17,4 us 0,19 ms 115200 8,7 us 0,10 ms
Kecepatan pengiriman data (Baud rate) antara pengirim dan penerima haruslah mempunyai kecepatan pengiriman data yang sama. Sehingga ketika pengirim mengirimkan sinyal start maka bagian penerima memulai pulsa pengambilan data (sampling clock) pada kecepatan yang sama bagi pengirim maupun penerima.
Pada komunikasi asinkron terdapat opsi pengecekan data yang telah dikirim melalui fasilitas parity, fasilitas parity ini dapat digunakan atau tidak tergantung kebutuhan pengguna. Tujuan pemberian bit parity ini adalah untuk memastikan bahwa bit-bit yang dikirimkan tidak mengalami perubahan nilai setelah sampai di penerima dikarenakan oleh gangguan luar (noise). Parity mempunyai dua jenis
yaitu parity even (genap) dan parity odd (ganjil). Jenis Parity even dapat diketahui dari jumlah bit „1‟ pada bit-bit data dan bit parity berjumlah genap. Sementara jenis parity ganjil dapat diketahui dari jumlah bit „1‟ pada bit-bit data dan bit
parity berjumlah ganjil. Pada Tabel 2.2 adalah contoh jenis parity genap dan
ganjil.
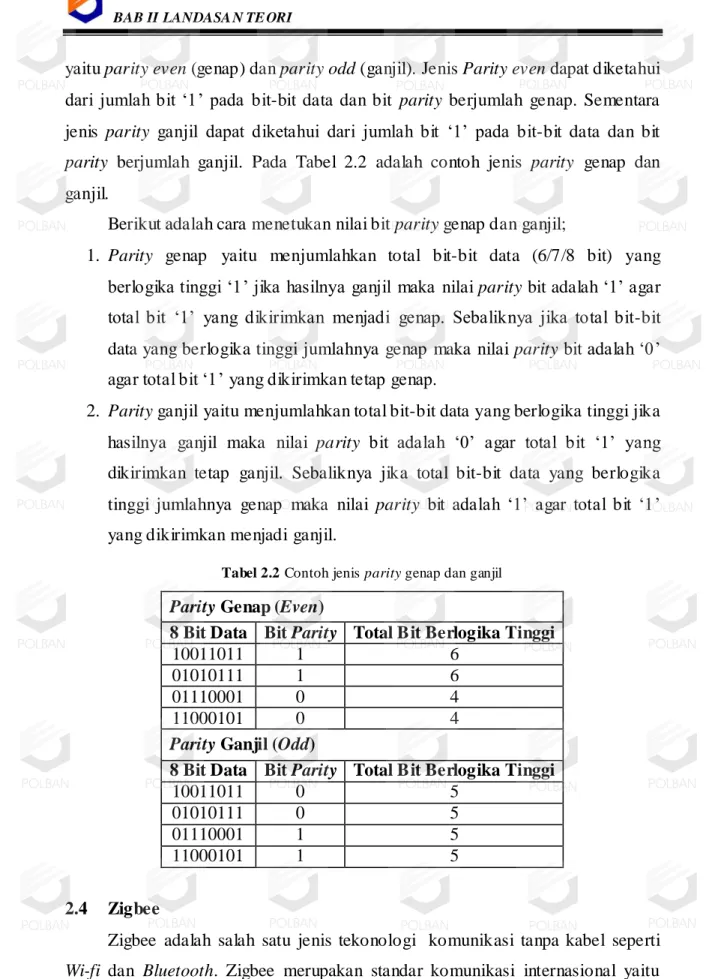
Berikut adalah cara menetukan nilai bit parity genap dan ganjil;
1. Parity genap yaitu menjumlahkan total bit-bit data (6/7/8 bit) yang berlogika tinggi „1‟ jika hasilnya ganjil maka nilai parity bit adalah „1‟ agar total bit „1‟ yang dikirimkan menjadi genap. Sebaliknya jika total bit-bit data yang berlogika tinggi jumlahnya genap maka nilai parity bit adalah „0‟ agar total bit „1‟ yang dikirimkan tetap genap.
2. Parity ganjil yaitu menjumlahkan total bit-bit data yang berlogika tinggi jika hasilnya ganjil maka nilai parity bit adalah „0‟ agar total bit „1‟ yang dikirimkan tetap ganjil. Sebaliknya jika total bit-bit data yang berlogika tinggi jumlahnya genap maka nilai parity bit adalah „1‟ agar total bit „1‟ yang dikirimkan menjadi ganjil.
Tabel 2.2 Contoh jenis parity genap dan ganjil Parity Genap (Even)
8 Bit Data Bit Parity Total Bit Berlogika Tinggi
10011011 1 6
01010111 1 6
01110001 0 4
11000101 0 4
Parity Ganjil (Odd)
8 Bit Data Bit Parity Total Bit Berlogika Tinggi
10011011 0 5
01010111 0 5
01110001 1 5
11000101 1 5
2.4 Zigbee
Zigbee adalah salah satu jenis tekonologi komunikasi tanpa kabel seperti
Wi-fi dan Bluetooth. Zigbee merupakan standar komunikasi internasional yaitu
IEEE 802.15.4 untuk aplikasi tertentu. Zigbee termasuk personal area network (PAN) yaitu bisa digunakan untuk membangun jaringan sendiri yang tidak
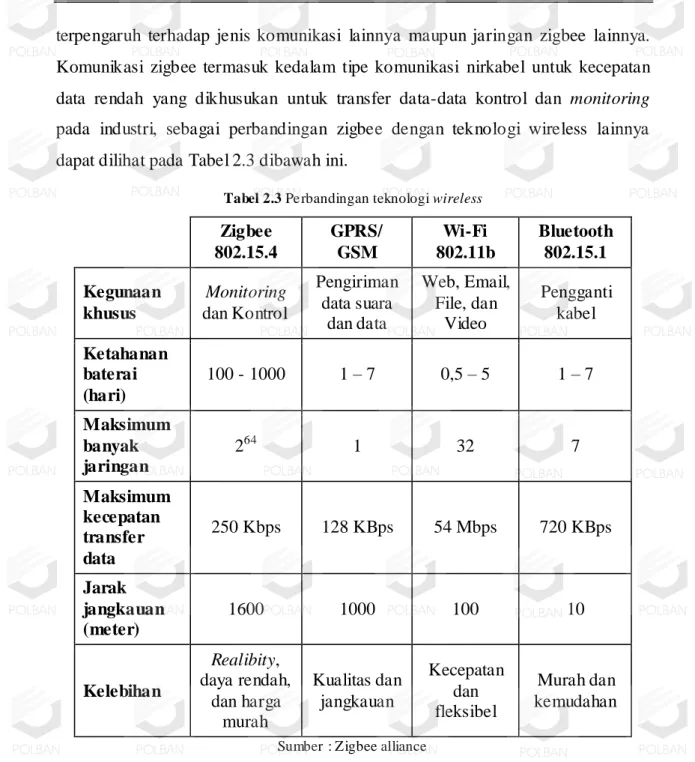
terpengaruh terhadap jenis komunikasi lainnya maupun jaringan zigbee lainnya. Komunikasi zigbee termasuk kedalam tipe komunikasi nirkabel untuk kecepatan data rendah yang dikhusukan untuk transfer data-data kontrol dan monitoring pada industri, sebagai perbandingan zigbee dengan teknologi wireless lainnya dapat dilihat pada Tabel 2.3 dibawah ini.
Tabel 2.3 Pe rbandingan teknologi wireless Zigbee 802.15.4 GPRS/ GSM Wi-Fi 802.11b Bluetooth 802.15.1 Kegunaan khusus Monitoring dan Kontrol Pengiriman data suara dan data Web, Email, File, dan Video Pengganti kabel Ketahanan baterai (hari) 100 - 1000 1 – 7 0,5 – 5 1 – 7 Maksimum banyak jaringan 264 1 32 7 Maksimum kecepatan transfer data 250 Kbps 128 KBps 54 Mbps 720 KBps Jarak jangkauan (meter) 1600 1000 100 10 Kelebihan Realibity, daya rendah, dan harga murah Kualitas dan jangkauan Kecepatan dan fleksibel Murah dan kemudahan
Sumber : Zigbee alliance
Zigbee berasal dari kata Zig dan Bee menyatakan lintasan komunikasi dalam menyampaikan informasi adalah berbentuk seperti sarang lebah yang bisa membentuk sebuah jaringan yaitu satu perangkat zigbee dapat berkomunikasi dengan banyak perangkat zigbee lainnya. Berikut Gambar 2.6 adalah simbol Zigbee.
Gambar 2.6 Simbol te knologi ko munikasi Zigbee
Sumber : Zigbee alliance, 2010
Ada dua konfigurasi Zigbee yaitu Peer to peer dan Nonbeacon. Kofigurasi
peer to peer (Gambar 2.7) berarti sebuah perangkat zigbee mempunyai status
yang sama (sejenis) dengan yang lainnya dan tiap perangkat zigbee dapat berkomunikasi antara satu dengan yang lainnya dalam area yang masih dapat dijangkau. Peer to peer ini merupakan konfigurasi yang cukup sederhana sama seperti jalur bus dalam komputer yaitu masing- masing perangkat mempunyai alamat yang berbeda sehingga untuk berkomunikasi diperlukan alamat tujuan agar data dapat terkirim ke prangkat yang dituju. Sementara konfigurasi jaringan
nonbeacon (Gambar 2.8) yaitu dalam suatu jaringan minimal terdapat coodinator
sebagai pusatnya dan end-device sebagai ujung jaringannya, satu lagi jika dibutuhkan yaitu router yaitu sebagai perpanjangan tangan untuk coordinator dan
end-device-nya.
Gambar 2.7 Konfigurasi Peer to Peer
Sumber : Datasheet XBEE, 2010
Gambar 2.8 Konfigurasi ja ringan nonbeacon
Sumber : Datasheet XBEE, 2010
2.5 Modul Wireless XBee 2.4GHz
Modul wireless XBee 2.4 (Gambar 2.9) adalah modul radio frekuensi
transciever menggunakan teknologi komunikasi Zigbee dan bekerja pada
frekuensi UHF (Ultra High Frequency) yaitu 2.4GHz dengan panjang gelombang sekitar 124mm. Dalam satu modul XBee ini terdapat pengirim sekaligus penerima dengan antarmuka sistem UART (Universal Asynchronous Receiver Transmitter). Jalur pengirim dan penerima yang terpisah jadi memungkinkan modul untuk mengirim data sekaligus menerima data pada waktu yang hampir bersamaan. Berikut Gambar 2.10 diagram blok modul wireless XBee 2.4GHz.
Gambar 2.9 Modul XBee 2.4GHz
Sumber : Datasheet XBEE, 2010
Gambar 2.10 Diagra m b lok modul wireless XBee 2.4GHz
Sumber : Datasheet XBEE, 2010
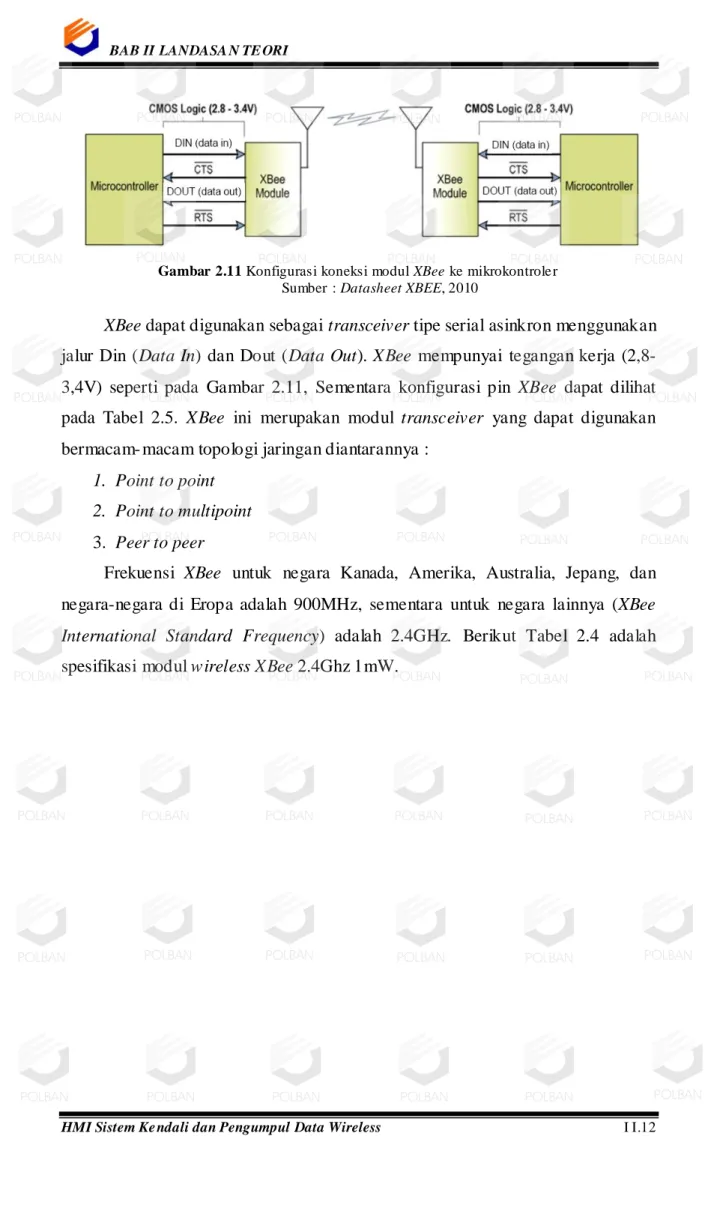
Gambar 2.11 Konfigurasi koneksi modul XBee ke mikrokontrole r
Sumber : Datasheet XBEE, 2010
XBee dapat digunakan sebagai transceiver tipe serial asinkron menggunakan
jalur Din (Data In) dan Dout (Data Out). XBee mempunyai tegangan kerja (2,8-3,4V) seperti pada Gambar 2.11, Sementara konfigurasi pin XBee dapat dilihat pada Tabel 2.5. XBee ini merupakan modul transceiver yang dapat digunakan bermacam- macam topologi jaringan diantarannya :
1. Point to point 2. Point to multipoint
3. Peer to peer
Frekuensi XBee untuk negara Kanada, Amerika, Australia, Jepang, dan negara-negara di Eropa adalah 900MHz, sementara untuk negara lainnya (XBee
International Standard Frequency) adalah 2.4GHz. Berikut Tabel 2.4 adalah
spesifikasi modul wireless XBee 2.4Ghz 1mW.
Tabel 2.4 Spesifikasi XBee 2.4Gh z 1mW
Spesifikasi XBee
Performa
Jarak jangkauan (dalam ruangan/indoor) 90 meter
Jarak jangkauan (luar ruangan/outdoor) 30 meter
Daya keluaran RF 1mW
Kecepatan transfer data serial 1200 bps - 250kbps
Sensitifitas penerima
(Receiver Sensitivity) -92dBm
Suplai yang dibutuhkan
Tegangan kerja 2,8 - 3,4 V
Arus pada saat mengirim data
(Transmit Current) 45mA (Vcc = 3,3 V)
Arus pada saat menerima data
(Receiver Current) 50mA (Vcc = 3,3 V)
Power-down current < 10uA
Spesifikasi umum
Frekuensi kerja ISM 2,4GHz
Dimensi 2,438cm x 2,761cm
Suhu kerja -40 sampai 85OC (industrial)
Jaringan dan Keamanan
Topologi yang didukung Point to point, Point to multipoint
& Peer to peer
Banyak Channel 16 (11 sampai 26) Channel
Opsi pengalamatan PAN ID, Channel dan Address
Sumber : Datasheet XBEE, 2010
Tabel 2.5 Konfigurasi pin modul wireless XBee 2.4GHz
Pin Spesifikasi XBee
1 VCC Power Supply
2 DOUT UART Data Out
3 DIN/CONFIG‟ UART Data In
4 DO8 Digital Output 8
5 RESET‟ Reset modul
6 PWM0 / RSSI PWM output 0 / RX Signal
Strength Indicator
7 PWM1 PWM output 1
8 - Tidak terhubung
9 DTR‟ / SLEEP_RQ / DI8 Pin Sleep Control Line atau Digital
Input pin ke-8
10 GND Ground
11 AD4 / DIO4 Analog Input 4 atau Digital I/O 4
12 CTS‟ / DIO7 Clear-to-send Flow Control atau
Digital I/O 7
13 ON / SLEEP Module Status Indicator
14 VREF Voltage Referance A/D Inputs
15 Associate / AD5 / DIO5 Associated Indicator, Analog Input
5 or Digital I/O 6
16 RTS / AD6 / DIO6 Request-to-send Flow Control,
Analog Input 6 or Digital I/O 6
17 AD3 / DIO3 Analog Input 3 or Digital I/O 3
18 AD2 / DIO2 Analog Input 2 or Digital I/O 2
19 AD1 / DIO1 Analog Input 1 or Digital I/O 1
20 AD0 / DIO0 Analog Input 0 or Digital I/O 0
Sumber : Datasheet XBEE, 2010
2.6 IC Penyangga (Buffer) 74HC4050
IC penyangga (buffer) adalah suatu rangkaian yang berfungsi untuk menyelaraskan sinyal keluaran dari suatu perangkat agar perangkat lain dapat menerima sinyal yang diterimanya. Ada dua jenis IC penyangga yaitu analog dan digital, sementara IC 74HC4050 adalah termasuk IC penyangga digital. Ada beberapa ciri rangkaian penyangga digital yaitu sebagai berikut;
1. Menetapkan Impedansi 2. Bersifat menguatkan arus
3. Menyesuaikan logika masukan dengan logika keluaran.
Dibawah ini Gambar 2.12 adalah konfigurasi pin IC 74HC4050 dan 74HC4049. Jika IC 74HC4050 merupakan buffer tidak membalik (non-inverting) maka IC 74HC4049 merupakan buffer membalik (inverting).
Gambar 2.12 Konfigurasi p in IC 74HC4050 dan 74HC4049
Sumber : Datasheet IC 74HC4050, 2009
IC 74HC4050 adalah IC penyangga digital high speed CMOS yaitu bekerja bisa sampai frekuensi sekitar 8MHz karena tunda waktu tanggapan maksimum (Propagation Delay) adalah 60ns pada tegangan Vcc = 3,3V. Berikut Tabel 2.6 adalah spesifikasi elektris IC 74HC4050.
Tabel 2.6 Spesifikasi ele ktris IC 74HC4050 Parameter Simbol VCC (V) Min (V) Max (V)
Rentang tegangan operasi VCC - 2 5
Tegangan masukan logika tinggi VIH
2 1,5 -
4,5 3,15 -
6 4,2 -
Tegangan masukan logika rendah VIL
2 - 0,5
4,5 - 1,35
6 - 1,8
Tegangan keluaran logika tinggi VOH
2 1,9 -
4,5 4,4 -
6 5,9 -
Tegangan keluaran logika rendah VOL
2 - 0,1
4,5 - 0,1
6 - 0,1
Sumber : Datasheet IC 74HC4050, 2009
2.7 IC Real time Clock DS1307
IC RTC DS1307 merupakan IC (Integrated Circuit) yang khusus menangani pemwaktuan detik, menit, jam, hari, bulan, dan tahun yang sangat presisi dan memiliki akurasi hingga tahun 2100. IC ini dapat menghasilkan nilai waktu satu detik yang presisi dan akurat sehingga IC ini banyak dipergunakan pada perangkat jam digital, telepon seluler, dan perangkat pemwaktuan lainnya. Dibawah ini Gambar 2.13 adalah gambar pin diagram IC DS1307 dan gambar penggunaan umumnya.
Microcontroller DS1307 SDA SCL GND VCC SDA SCL GND VCC VCC VCC Crystal 3V X1 X2 Vbat 4K7 VCC 4K7 (a) (b)
Gambar 2.13 (a) Diagra m p in DS1307, (b) Rangkaian u mu m RTC DS1307
Sumber : Datasheet IC DS1307, 2007
Sebuah IC DS1307 membutuhkan kristal 32.768kHz agar pemwaktuan bekerja presisi dan akurat IC ini juga mempunyai fasilitas supply cadangan
menggunakan pin VBAT yang dihubungkan ke baterai 3V. Sehingga disaat supply
tegangan utama tidak ada atau tegangan VCC kurang dari tegangan baterai maka IC
ini otomatis mengalihkan sumber energinya ke baterai 3V dan mengkatifkan mode low-current battrey backup. Pada mode low-current battery backup ic ini tidak dapat diakses tetapi pemwaktuan masih tetap berjalan. RTC DS1307 membutuhkan arus 500nA pada mode low-current battery backup sehingga dengan baterai 3V/48mA dapat bertahan hingga 11 tahun, sedangkan pada mode aktif hanya membutuhkan 1,5mA. DS1307 dapat di akses oleh mikroprosessor atau mikrokontroler menggunakan komunikasi I2C (Inter Integrated Circuit). I2C ini merupakan komunikasi sinkron sehingga pada mikrokontroler dibutuhkan dua jalur komunikasi, satu jalur digunakan sebagai Serial Data (SDA) dan satunya lagi sebagai jalur Serial Clock (SCL). Berikut Gambar 2.14 adalah protokol penulisan data pada RTC dan Gambar 2.15 adalah protokol pembacaan data dari RTC. Pada protokol penulisan data, diawali dengan alamat slave lalu alamat memori dan dilanjutkan dengan urutan data. Sementara untuk membaca data, mikrokontroler harus menggunakan protokol penulisan data dahulu yaitu alamat
slave dan alamat memori lalu dilanjutkan dengan protokol pembacaan data yaitu
alamat slave lalu data yang dibaca. Pada pembacaan data diperlukan protokol penulisan data dahulu karena agar RTC mengetahui alamat memori yang akan dibaca.
Gambar 2.14 Protokol penulisan data pada RTC DS1307
Sumber : Datasheet IC DS1307, 2007
Gambar 2.15 Protokol pe mbacaan data dari RTC DS1307
Sumber : Datasheet IC DS1307, 2007
Sebelum menggunakan RTC ini diperlukan pengaturan tanggal dan waktu yang dapat diatur dari komputer sebagai HMI (Human Machine Interface) dan mikrokontroler sebagai perantarannya. Pada proyek akhir ini RTC ditempatkan hanya pada perangkat master.
2.8 Serial EEPROM
Serial EEPROM (Electrically Erasable Programmable Read Only Memory ) yaitu jenis memori non-volatile yang banyak digunakan pada perangkat elektronik seperti komputer, telepon seluler, oven elektronik, RTU (Remote Terminal Unit) sebagai penyimpan data-data konfigurasi, tabel kalibrasi, dan sampel data analog seperti suhu, level air, dan lain – lain. Ada tiga jenis serial EEPROM dilihat dari tipe komunikasiinya, yaitu;
a) TWI (Two-Wire Interface)
TWI yaitu komunikasi menggunakan dua jalur yaitu satu sebagai jalur data dua arah (bi-directional) dan satu jalur lagi sebagai pulsa. Pada tipe TWI ini umum digunakan protokol I2C (Inter Integrated Circuit). Mempunyai kecepatan transfer data yang paling lambat dibanding 3WI dan SPI karena maksimum kecepatan pulsanya adalah 1MHz. Pada serial EEPROM
menggunakan TWI maksimum perangkat dalam satu bus adalah 8 buah perangkat karena pengalamatannya hanya ditentukan oleh A0,A1, dan A2. Kelebihan TWI adalah paling mudah digunakan dan murah dalam pembuatan IC karena tidak begitu kompleks. IC seria l EEPROM buatan atmel yang menggunakan TWI adalah jenis AT24Cxxxx.
b) 3WI (Three-Wire Interface)
3WI yaitu komunikasi menggunakan tiga jalur yaitu jalur pulsa, data keluar, dan data masuk. Kecepatan pulsa 3WI mampu mencapai 2MHz. Kelebihan 3WI adalah perangkat yang tidak terbatas dalam satu bus. IC serial EEPROM buatan atmel yang menggunakan 3WI adalah jenis AT93Cxxxx.
c) SPI (Serial Peripheral Interface)
SPI yaitu komunikasi menggunakan empat jalur yaitu jalur pulsa, data keluar, data masuk, chip select (CS). Kecepatan pulsa SPI mampu mencapai 20MHz, tipe ini adalah yang paling cepat diantara TWI dan 3WI. Kelebihan SPI adalah perangkat tidak terbatas dalam satu bus dan dapat mengirim data dalam jumlah besar. Perangkat EEPROM yang menggunakan tipe SPI contohnya microSD. IC serial EEPROM buatan atmel yang menggunakan TWI adalah jenis AT25Cxxxx.
Pada proyek akhir ini menggunakan serial eeprom jenis TWI yaitu AT24Cxxxx. Serial EEPROM AT24Cxxxx diakses menggunakan protokol I2C (Inter Integrated Circuit) sama seperti RTC DS1307. Dengan komunikasi I2C ini maka serial EEPROM dapat langsung dihubungkan dengan mikrokontroler sebagai master dan EERPOM tersebut menjadi slave. Pada umumnya serial EEPROM mempunyai banyak waktu tulis dan baca terbatas, tidak seperti RAM yang tidak terbatas. Serial EEPROM pada umumnya hanya dapat 100.000 kali tulis dan baca.
IC serial EEPROM yang umum digunakan adalah buatan atmel yaitu AT24Cxxxx. Tanda „xxxx‟ pada akhiran penamaan IC serial eeprom buatan atmel mengartikan total memori yang dipunyai IC tersebut. contoh IC AT24C64 maka total memori yang dimilikinya adalah 64Kb it atau 8KByte karena pada serial EEPROM tipe ini mempunyai 8 bit blok data tiap alamat.
Pada proyek akhir ini eeprom yang digunakan adalah AT24C512 dan AT24C64 buatan atmel. Serial EEPROM AT24C512 ditempatkan pada bagian
Master dan AT24C64 ditempatkan pada RTU. Dibawah ini Gambar 2.16
adalah contoh gambar rangkaian umum serial eeprom.
Microcontroller ATMEL 24Cxxxx SDA SCL GND VCC SDA SCL GND VCC VCC VCC A0 A1 4K7 VCC 4K7 A2 WP (a) (b)
Gambar 2.16 (a) Diagra m p in AT24Cxxxx, (b) Contoh rangkaian u mu m seria l
eeprom (ala mat seria l eepro m = 00H) Sumber : Datasheet IC AT24C64
2.9 USB to Serial Converter AVR309
USB to serial Converter AVR309 merupakan modul yang berfungsi untuk
mengubah data USB menjadi data serial asinkron RS232 tetapi pada level 0-5V. Modul ini terdiri dari rangkaian dan program yang telah disediakan di situs www.atmel.com secara gratis yang dapat dipergunakan bagi siapapun yang membutuhkan konversi komunikasi USB ke serial. Berikut Gambar 2.17 merupakan rangkaian USB to serial AVR309 yang telah disediakan oleh atmel.
Rangkaian tersebut menggunakan mikrokontroler ATtiny2313 seba gai
processornya. Cara kerja rangkaian USB to Serial AVR309 tidak dijelaskan pada laporan ini.
Gambar 2.17 Rangka ian USB to Serial Converter
Sumber : AVR309: Software Universal Serial Bus (USB) , (www.at me l.co m), 2009 Rangkaian pada Gambar 2.17 mempunyai koneksi USB yang langsung dapat di koneksikan melalui port USB pada komputer, dengan instalasi driver AVR309 yang sudah tersedia maka komputer dapat mengenali perangkat USB to
Serial ini sebagai virtual USB. Untuk mengirim data serial melalui perangkat
AVR309 ini dapat menggunakan software Visual Basic dan Delphi dengan fungsi- fungsi komunikasi serial yang telah disediakan.
2.10 Transduser Suhu LM35
LM35 adalah transduser suhu yang berukuran kecil yang mudah digunakan dan murah untuk mendapatkan pembacaan suhu yang linear dan stabil. LM35 berbentuk seperti transistor pada umumnya dapat di lihat pada Gambar 2.18 yang mempunyai footprint (TO-92). Kemampuan transduser ini adalah dapat mengukur
suhu dari -55OC sampai +150OC dan mempunyai keluaran analaog yaitu +10,0mV
per derajat celcius dan 0V pada suhu 0OC berarti jika suhu yang aktual 25OC maka
keluarannya adalah +250mV. LM35 mempunyai akurasi 0,5OC pada suhu 25OC.
Pada Gambar 2.19 adalah gambar rangkaian penggunaan umum untuk LM35.
Gambar 2.18 Transduser Suhu LM35
Sumber : Datasheet IC LM 35
Gambar 2.19 Rangka ian penggunaan umum LM35
Sumber : Datasheet IC LM 35
2.11 Selenoid valve
Selenoid valve (kran listrik) berfungsi sebagai kran pada umumnya yaitu
buka dan tutup tetapi dioprasikan oleh sinyal elektrik atau arus listrik. Arus listrik ini diubah menjadi gerakan mekanik yang dapat membuka dan menutup kran listrik tersebut. selenoid valve banyak digunakan di rumah-rumah maupun di industri sebagai bagian dari sistem otomasi aliran cairan. Selenoid valve dibedakan oleh ukuran pipa yang dihubungkannya seperti 1/8 inchi, 1/4 in, 1/5 in, dan sebagainya. Berikut Gambar 2.20 adalah selenoid valve 3/4 in.
Gambar 2.20 Selenoid valve 3/4 in
Kran elektrik mengubah arus listrik menjadi gerakan plunger yaitu plunger (besi tutup/buka) pada saat lilitan diberi arus listrik maka plunger akan tertarik ke atas hingga katup buka/tutup tidak tertekan plunger, akibatnya tekanan air yang masuk menekan katup buka/tutup hingga naik dan memberi lubang untuk air dapat lewat. Apabila lilitan tidak diberi arus listrik maka plunger akan menekan katup buka/tutup sehingga tekanan air yang masuk tidak cukup kuat untuk membuka katup tersebut.
2.12 Delphi
Delphi adalah perangkat lunak yang khusus digunakan untuk membangun suatu aplikasi GUI pada komputer. Delphi dapat membangun aplikasi yang terintegrasi dengan hardware yaitu human machine interface (HMI). Keunggulan delphi yaitu :
a) IDE (Integrated Development Environment) atau lingkungan pengembangan aplikasi sendiri.
b) Proses kompilasi cepat, pada saat aplikasi yang dibuat dijalankan pada delphi maka secara otomatis akan di baca sebagai sebuah progra m tanpa dijalankan terpisah.
c) Muda digunakan, source code delphi yang merupakan turunan pascal sehingga tidak diperlukan suatu penyesuaian lagi.
d) Bersifat mulit purpose, artinya bahasa pemograman delphi dapat digunakan untuk mengembangkan berbagai keperluan pengembangan aplikasi dengan tujuan yang berbeda-beda.
Pada proyek akhir ini delphi digunakan untuk membuat human machine
interface software yang dapat berkomunikasi dengan master. Pada perancangannya software ini dirancangan sebagai SCADA (Supervisory Control
and Data Acquisition) dalam bentuk yang sederhana.
2.13 Bascom-AVR
Bascom adalah salah satu aplikasi komputer yang digunakan untuk pemrograman mikrokontroler keluarga AVR. Pada Gambar 2.21 adalah tampilan BASCOM-AVR. BASCOM-AVR ini menggunakan bahasa tingkat tinggi yang merupakan pengembangan dari bahasa Basic.
Didalam software BASCOM ini terdapat fungsi khusus untuk mengubah format program bahasa basic kedalam format hexsadesimal agar program yang telah dibuat dapat dimengerti oleh mikrokontroler. Program yang disimpan oleh
software ini berekstensi *.bas dan hasil kompilasinya adalah *.hex. File
berekstensi *.hex inilah yang akan dimasukan (download) ke mikrokontroler. Diperlukan suatu perangkat dan software tambahan untuk memasukkan file .hex ke mikrokontroler yaitu salah satunya ExtrmeBurner-AVR. Pada Gambar 2.22 adalah tampilan Software Extrme Burner. ExtrmeBurner ini membutuhkan file hasil kompilasi yaitu .hex untuk di download ke mikrokontroler sementara perangkat keras tambahannya adalah USBasp sebagai alat untuk memasukan program ke mikrokontroler melalui USB, alat ini umum disebut downloader. Pada Gambar 2.23 adalah perangkat USBasp, perangkat USBasp ini dibuat sendiri oleh penulis, penulis hanya merancang PCB dan menyoldernya sedangkan skematik dan program internal (firmware) sudah ada.
Gambar 2.21 Ta mpilan software BASCOM -A VR
Gambar 2.22 Ta mpilan software Ext re me Burner
Gambar 2.23 Perangkat downloader (USBasp)
BACOM-AVR telah menyediakan banyak rutin yang siap dipakai tergantung kebutuhannya. Dibawah ini adalah beberapa fungsi yang digunkan pada proyek akhir ini dalam mikrokontroler master dan slave;
a) Komunikasi serial (Tx,Rx) Full duplex b) Komunikasi Two-Wire Interface c) Operasi Aritmatika dan logika
d) Operasi pemindahan data dan perbandingan e) Timer dan operasi lompatan
Pada laporan ini perintah yang digunakan pada pemogramman mikrokontroler di fokuskan pada perintah-perintah untuk komunikasi serial sedangkan perintah lainnya sudah umum digunakan. Berikut adalah beberapa penjelasan rutin untuk komunikasi serial :
A. Waitkey
Perintah waitkey ini berfungsi untuk mengambil dan menunggu data serial yang datang dari pin Rx. Program utama dihentikan sampai menerima sebuah karakter pada buffer masukan lalu program utama berjalan kembali. Cara penulisan perintahnya adalah sebagai berikut;
Var = waitkey( )
Keterangan : Var, merupakan variabel yang sudah didefinisikan sebelumnya dapat berupa integer, word dan byte. Jika variabel berupa integer maka perintah waitkey akan menunggu 2 karakter (2 byte), jika word maka akan menunggu 4 karakter (4 byte), sedangkan jika variabel berupa byte maka perintah waitkey akan menunggu 1 karakter (1 byte).
B. Inkey
Perintah inkey ini berfungsi untuk mengambil data serial pada buffer masukan. Perintah ini tidak akan menunggu karakter yang datang, ada atau tidak ada data maka data pada buffer tetap diambil. Cara penulisan perintahnya adalah sebagai berikut;
Var = inkey( )
Keterangan: Var, merupakan variabel yang sudah didefinisikan sebelumnya dapat berupa integer, word, dan byte sama seperti perintah waitkey. Perintah
inkey ini akan memberikan nilai 0 pada variabel jika tidak ada data pada buffer
atau data pada buffer adalah 0 juga. C. Inputbin
Perintah inputbin ini berfungsi sama seperti waitkey yaitu mengambil dan menunggu data pada buffer serial. Tetapi perintah ini dapat dilakukan untuk banyak variabel masukan. Cara penulisan perintahnya adalah sebagai berikut;
Inputbin var1,var2,var3
Keterangan : Var1,var2,var3 merupakan variabel yang sudah didefinisikan sebelumnya dapat berupa integer, word, dan byte. Perintah inputbin ini akan menghentikan program utama dan mengambil data lalu menghitung total karakter yang sudah masuk pada buffer serial. Jika total karakter sudah terpenuhi maka program utama akan dijalankan kembali.
D. Print
Perintah print ini berfungsi untuk mengirim data melalui port serial. Berikut Tabel 2.7 Cara penulisannya
Tabel 2.7 Beberapa cara penulisan perintah print
Perintah Hasil keluaran
(desimal)
Print Var (jika var = 20) (50) (48)
Print Var; (jika var = 20) (50) (48)
Print “Andi” (65) (110) (100) (105) (13) (10)
Keterangan : Var merupakan variabel ya ng telah didefinisikan dan diisi dapat berupa integer, word, byte, dan string.