Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 1
Tutorial
Pemrograman Mikrokontroler AVR dengan
AVR Studio dan WinAVR GCC (ATMega16/32/8535)
Versi 2.0
http://klikdisini.com/embedded
oleh
Agfianto Eko Putra ([email protected]) dan Dhani Nugraha ([email protected])
Unit Layanan Elektronika dan Instrumentasi
Jurusan Ilmu Komputer dan Elektronika
Fakultas Matematika dan Ilmu Pengetahuan Alam
Universitas Gadjah Mada – Yogyakarta
2011Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 2
Tutorial Pemrograman Mikrokontroler AVR dengan
AVR Studio dan WinAVR GCC (ATMega16/32/8535)
Disusun oleh:
Agfianto Eko Putra – [email protected] dan
Dhani Nugraha - [email protected]
Daftar Isi
1. Apakah Mikrokontroler itu? ... 4
2. Pengetahuan Dasar Mikrokontroler AVR ... 7
2.1. Pendahuluan ... 7
2.2. Memilih AVR “yang benar” ... 8
2.3. Ada apa dengan Mikrokontroler AVR ATMega16? ... 9
2.3.1. Ringkasan Fitur-fitur Mikrokontroler AVR ATMega16 ... 9
2.3.2. Diagram Pin dan Diagram Blok Mikrokontroler AVR ATMega16 ... 10
2.3.3. Penjelasan Singkat Pin-pin pada Mikrokontroler AVR ATMega16 ... 11
3. Pengenalan Bahasa C untuk Mikrokontroler AVR ... 15
3.1. Struktur Penulisan Bahasa C ... 15
3.2. Tipe-tipe data dalam Bahasa C ... 15
3.3. Deklarasi Variabel dan Konstanta ... 15
3.4. Pernyataan ... 16
3.5. Fungsi ... 16
3.6. Pernyataan berkondisi dan Pengulangan... 16
3.7. Operasi Logika dan Bilangan Biner ... 17
3.8. Operasi Aritmetika... 17
3.9. Pengulangan Terus-menerus atau Infinite Looping ... 18
4. Menggunakan AVR Studio 4 dengan WinAVR GCC ... 20
5. Masukan/Luaran (I/O) pada Mikrokontroler AVR ... 25
5.1. Register DDRx ... 25
5.2. Register PORTx ... 25
5.3. Register PINx ... 26
5.4. Percobaan-1: LED berkedip-kedip ... 27
5.5. Percobaan-2: Membunyikan buzzer! ... 29
5.6. Percobaan-3: Aplikasi Pushbutton untuk ON/OFF LED ... 30
6. Timer/Counter dan Watchdog pada Mikrokontroler AVR ... 32
6.1. Percobaan-4: Menggunakan Timer1 ... 35
6.2. Percobaan-5: Menggunakan Timer2 ... 37
6.3. Percobaan-6: Menggunakan Timer0 ... 39
6.4. Percobaan-7: Lima Kali pencacahan – aplikasi Counter ... 41
6.5. Tentang Watchdog ... 42
6.6. Percobaan-8: Aplikasi Watchdog (Bagian-1) ... 43
6.7. Percobaan-9: Aplikasi Watchdog (Bagian-2) ... 44
7. Interupsi dan Aplikasinya ... 46
7.1. Pendahuluan Interupsi Mikrokontroler AVR ... 46
7.2. Percobaan-10: ON/OFF LED menggunakan Interupsi Timer0 ... 47
7.3. Percobaan-11: ON/OFF LED melalui Interupsi Eksternal ... 48
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 3
8.1. Penghasil Detak - Clock Generator ... 50
8.2. Mengirim Data – USART Transmitter ... 54
8.3. Menerima Data – USART Receive ... 56
8.4. Percobaan-12: Komunikasi Serial ... 57
9. LCD dan ADC ... 60
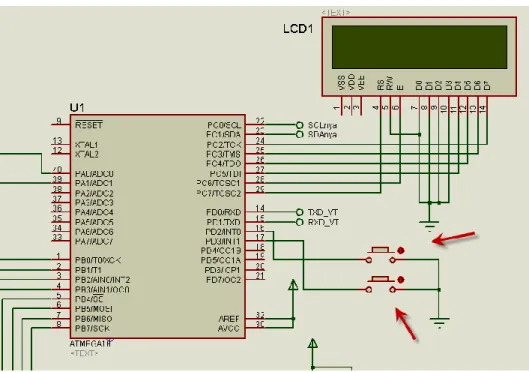
9.1. Rangkaian antarmuka LCD dan ADC ... 60
9.2. Percobaan-13: Aplikasi LCD Bagian-1 ... 62
9.3. Percobaan-14: Aplikasi LCD Bagian-2 ... 62
9.4. Percobaan-15: Aplikasi LCD Bagian-3 ... 63
9.5. Percobaan-16: Aplikasi LCD Bagian-4 ... 64
9.6. Percobaan-17: Menggunakan ADC Internal Bagian-1 ... 65
9.7. Percobaan-18: Menggunakan ADC Internal Bagian-2 ... 66
10. Komunikasi I2C untuk RTC dan EEPROM ... 68
10.1. Pendahuluan RTC DS1307 ... 68
10.2 Komunikasi I2C pada RTC DS1307 ... 68
10.3. Rangkaian Baku RTC DS1307 ... 70
10.4. Percobaan-19: Aplikasi RTC (I2C) Bagian-1 ... 70
10.5. Percobaan-20: Aplikasi RTC (I2C) Bagian-2 ... 72
10.6. Tentang Two-wire Serial EEPROM AT24C32/64 ... 74
10.7. Percobaan-21: Akses EEPROM Internal... 76
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 4
1. Apakah Mikrokontroler itu?
Jika kita bicara tentang Mikrokontroler, maka tidak terlepas dari pengertian atau definisi tentang Komputer itu sendiri, mengapa? Ada kesamaan-kesamaan antara Mikrokontroler dengan Komputer (atau Mikrokomputer), antara lain:
Sama-sama memiliki unit pengolah pusat atau yang lebih dikenal dengan CPU (Central
Processing Unit);
CPU tersebut sama-sama menjalankan program dari suatu lokasi atau tempat, biasanya dari ROM (Read Only Memory)1 atau RAM (Random Access Memory)2;
Sama-sama memiliki RAM yang digunakan untuk menyimpan data-data sementara atau yang lebih dikenal dengan variabel-variabel;
Sama-sama memiliki beberapa luaran dan masukan (I/O) yang digunakan untuk melakukan komunikasi timbal-balik dengan dunia luar, melalui sensor (masukan) dan aktuator (luaran), perhatikan bagan yang ditunjukkan pada Gambar 1.
Gambar 1. Bagan masukan, pemrosesan hingga luaran
Lantas apa yang membedakan antara Mikrokontroler dengan Komputer atau Mikrokomputer? Begitu mungkin pertanyaan yang ada di benak kita, saat kita membaca beberapa daftar kesamaan yang sudah saya tuliskan tersebut. Sama sekali berbeda, itu jawaban yang saya berikan kepada Anda:
Mikrokontroler adalah versi mini dan untuk aplikasi khusus dari Mikrokomputer atau Komputer! Berikut saya berikan kembali daftar kesamaan yang pernah kemukakan sebelumnya dengan menekankan pada perbedaan antara Mikrokontroler dan Mikrokomputer:
CPU pada sebuah Komputer berada eksternal dalam suatu sistem, sampai saat ini kecepatan operasionalnya sudah mencapai lebih dari 2,5 GHz, sedangkan CPU pada Mikrokontroler berada didalam (internal) sebuah chip, kecepatan kerja atau operasionalnya masih cukup rendah, dalam orde MHz (misalnya, 24 MHz, 40 MHz dan lain sebagainya). Kecepatan yang relatif rendah ini sudah mencukupi untuk aplikasi-aplikasi berbasis mikrokontroler.
Jika CPU pada mikrokomputer menjalankan program dalam ROM atau yang lebih dikenal dengan BIOS (Basic I/O System) pada saat awal dihidupkan, kemudian mengambil atau menjalankan program yang tersimpan dalam hard disk. Sedangkan mikrokontroler sejak awal menjalankan program yang tersimpan dalam ROM internal-nya (bisa berupa Mask ROM atau Flash PEROM atau Flash ROM). Sifat memori program dalam mikrokontroler ini non-volatile, artinya tetap akan tersimpan walaupun tidak diberi catu daya.
1
Memori yang hanya bisa dibaca saja.
2
Memori yang bisa dibaca juga bisa ditulisi. Masukan-masukan • sensor cahaya • sensor suhu • sensor tekanan, dll Pemroses • uC AT89 • uC AVR • uC PIC16F, dll Luaran-luaran • aktuator - motor • relay • speaker, dll
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 5 RAM pada mikrokomputer bisa mencapai ukuran sekian GByte dan bisa di-upgrade ke ukuran yang lebih besar dan berlokasi di luar CPU-nya, sedangkan RAM pada mikrokontroler ada di dalam chip dan kapasitasnya rendah, misalnya 128 byte, 256 byte dan seterusnya dan ukuran yang relatif kecil inipun dirasa cukup untuk aplikasi-aplikasi mikrokontroler.
Luaran dan masukan (I/O) pada mikrokomputer jauh lebih kompleks dibandingkan dengan mikrokontroler, yang jauh lebih sederhana, selain itu, pada mikrokontroler akses keluaran dan masukan bisa per bit.
Jika diamati lebih lanjut, bisa dikatakan bahwa Mikrokomputer atau Komputer merupakan komputer serbaguna atau general purpose computer, bisa dimanfaatkan untuk berbagai macam aplikasi (atau perangkat lunak). Sedangkan mikrokontroler adalah special purpose computer atau komputer untuk tujuan khusus, hanya satu macam aplikasi saja.
Perhatikan Gambar 2, agar Anda mendapatkan gambaran tentang mikrokontroler lebih jelas.
Gambar 2. Diagram Blok mikrokontroler (yang) disederhanakan
ALU, Instruction Decoder, Accumulator dan Control Logic, sebagaimana ditunjukkan pada Gambar 2, merupakan Otak-nya mikrokontroler yang bersangkutan. Jantungnya berasal dari detak OSC (lihat pada Gambar 2 sebelah kiri atas). Sedangkan di sekeliling „Otak‟ terdapat berbagai macam periferal seperti SFR (Special Function Register) yang bertugas menyimpan data-data sementara selama proses berlangsung). Instruction Decoder bertugas menerjemahkan setiap instruksi yang ada di dalam Program Memory (hasil dari pemrograman yang kita buat sebelumnya). Hasil penerjemahan tersebut merupakan suatu operasi yang harus dikerjakan oleh ALU (Arithmetic
Logic Unit), mungkin dengan bantuan memori sementara Accumulator yang kemudian
menghasilkan sinyal-sinyal kontrol ke seluruh periferal yang terkait melalui Control Logic.
Memori RAM atau RAM Memory bisa digunakan sebagai tempat penyimpan sementara, sedangkan SFR (Special Function Register) sebagian ada yang langsung berhubungan dengan I/O dari mikrokontroler yang bersangkutan dan sebagian lain berhubungan dengan berbagai macam operasional mikrokontroler.
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 6
ADC atau Analog to Digital Converter (tidak setiap mikrokontroler memiliki ADC internal), digunakan untuk mengubah data-data analog menjadi digital untuk diolah atau diproses lebih lanjut.
Timer atau Counter digunakan sebagai pewaktu atau pencacah, sebagai pewaktu fungsinya seperti
sebuah jam digital dan bisa diatur cara kerjanya. Sedangkan pencacah lebih digunakan sebagai penghitung atau pencacah event atau bisa juga digunakan untuk menghitung berapa jumlah pulsa dalam satu detik dan lain sebagainya. Biasanya sebuah mikrokontroler bisa memiliki lebihd dari 1 timer.
EEPROM (sama seperti RAM hanya saja tetap akan menyimpan data walaupun tidak mendapatkan sumber listrik/daya) dan port-port I/O untuk masukan/luaran, untuk melakukan komunikasi dengan periferal eksternal mikrokontroler seperti sensor dan aktuator.
INFORMASI PELATIHAN MIKROKONTROLER, PLC DAN LAIN-LAIN
HTTP://KLIKDISINI.COM/PELATIHANAVR
Beberapa catatan mikrokontroler lainnya adalah:
„Tertanam‟ (atau embedded) dalam beberapa piranti (umumnya merupakan produk konsumen) atau yang dikenal dengan istilah embedded system atau embedded controller;
Terdedikasi untuk satu macam aplikasi saja (lihat contoh-contoh yang akan saya terangkan pada bagian lain dari buku ini);
Hanya membutuhkan daya yang (cukup) rendah (low power) sekitar 50 mWatt (Anda bandingkan dengan komputer yang bisa mencapai 50 Watt lebih);
Memiliki beberapa keluaran maupun masukan yang terdedikasi, untuk tujuan atau fungsi-fungsi khusus;
Kecil dan relatif lebih murah (seri AT89 di pasaran serendah-rendahnya bisa mencapai Rp. 15.000,00, mikrokontroler AVR di pasaran saat ini juga relatif murah sedangkan Basic Stamp bisa mencapai Rp. 500.000,00);
Seringkali tahan-banting, terutama untuk aplikasi-aplikasi yang berhubungan dengan mesin atau otomotif atau militer.
Mikrokontroler yang beredar saat ini dibedakan menjadi dua macam, berdasarkan arsitekturnya:
o Tipe CISC atau Complex Instruction Set Computing yang lebih kaya instruksi tetapi fasilitas internal secukupnya saja (seri AT89 memiliki 255 instruksi);
o Tipe RISC atau Reduced Instruction Set Computing yang justru lebih kaya fasilitas internalnya tetapi jumlah instruksi secukupnya (seri PIC16F hanya ada sekitar 30-an instruksi).
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 7
2. Pengetahuan Dasar Mikrokontroler AVR
2.1. Pendahuluan
Keluarga Mikrokontroler AVR merupakan mikrokontroler dengan arsitektur modern (emang selama ini ada yang kuno kali??). Perhatikan Gambar 3, Atmel membuat 5 (lima) macam atau jenis mikrokontroler AVR, yaitu:
TinyAVR (tidak ada kaitannya ama mbak Tini yang jualan gudeg…)
Mikrokontroler (mungil, hanya 8 sampai 32 pin) serbaguna dengan Memori Flash untuk menyimpan program hingga 16K Bytes, dilengkapi SRAM dan EEPROM 512 Bytes. MegaAVR (nah yang ini sudah mulai banyak yang nulis bukunya…)
Mikrokontroler dengan unjuk-kerja tinggi, dilengkapi Pengali Perangkat keras (Hardware Multiplier), mampu menyimpan program hingga 256 KBytes, dilengkapi EEPROM 4K Bytes dan SRAM 8K Bytes.
AVR XMEGA
Mikrokontroler AVR 8/16-bit XMEGA memiliki periferal baru dan canggih dengan unjuk-kerja, sistem Event dan DMA yang ditingkatkan, serta merupakan pengembangan keluarga AVR untuk pasar low power dan high performance (daya rendah dan unjuk-kerja tinggi). AVR32 UC3
Unjuk-kerja tinggi, mikrokontroler flash AVR32 32-bit daya rendah. Memiliki flash hingga 512 KByte dan SRAM 128 KByte.
AVR32 AP7
Unjuk-kerja tinggi, prosesor aplikasi AVR32 32-bit daya rendah, memiliki SRAM hingga 32 KByte.
Gambar 3. Mikrokontroler Atmel: Sukses melalui inovasi
Cuman yang populer di Indonesia adalah tinyAVR dan megaAVR, itupun masih kalah populer dengan keluarga AT89 yang belakangan juga sudah mulai banyak yang beralih ke AVR.
Perbedaan jenis-jenis tersebut terletak dari fasilitas, atau lebih dikenal dengan fitur-fiturnya. Jenis TinyAVR merupakan mikrokontroler dengan jumlah pin yang terbatas (sedikit maksudnya) dan sekaligus fitur-fiturnya juga terbatas dibandingkan yang megaAVR. Semua mikrokontroler AVR
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 8
memiliki set instruksi (assembly) dan organisasi memori yang sama, dengan demikian berpindah-pindah (walaupun tidak disarankan) antar mikrokontroler AVR gak masalah dan mudah!
Beberapa mikrokontroler AVR memiliki SRAM, EEPROM, antarmuka SRAM eksternal, ADC, pengali perangkat keras, UART, USART dan lain sebagainya. Bayangkan saja Anda punya TinyAVR dan MegaAVR, kemudian telanjangi (maksudnya copotin) semua periferal-nya, nah Anda akan memiliki AVR Core yang sama! Kayak membuang semua isi hamburger, maka Anda akan mendapatkan rotinya doang yang sama…
2.2. Memilih AVR “yang benar”
Moralnya… tidak peduli tinyAVR, megaAVR, XMEGA AVR (AVR32 pengecualian karena masuk ke mikrokontroler 32-bit) semuanya memiliki unjuk-kerja yang sama saja, tetapi dengan “kompleksitas” atau fasilitas yang berbeda-beda, ibaratnya begini: banyak fasilitas dan fitur = megaAVR, fitur atau fasilitas terbatas = TinyAVR. Gitu aja kok repot…
Untuk lebih jelasnya perhatikan keterangan singkat yang saya berikan berikut ini, berdasar informasi resmi dari Atmel (http://www.atmel.com) dan maaf masih dalam bahasa Inggris (supaya kelihatannya aura kecanggihannya, he he he...).
tinyAVR
o Optimized for simple applications requiring a small microcontroller. o Great performance for cost effective devices.
o Fully featured with 10-bit ADCs and high speed PWMs onboard. o Self-Programming Flash memory for maximum flexibility. o debugWIRE On-Chip Debug and In-System Programming.
megaAVR
o Self-Programming Flash memory with boot block.
o High accuracy 10-bit A/D converters with up to x200 analog gain stage. o USART, SPI and TWI(1) compliant serial interfaces.
o IEEE 1149.1 compliant JTAG interface on megaAVRs with 44 pins or more. o On-Chip Debug through JTAG or debugWIRE interface.
AVR XMEGA
o picoPower technology for ultra low power consumption o True 1.6 volt operation and CPU speed up to 32 MHz. o Event System and DMA Controller.
o High speed, high resolution 12-bit ADC and DAC.
o Crypto engine, Timers/Counters and fast communication interfaces. o Accurate and flexible Clock System with dynamic clock switching.
AVR32 UC3
o High CPU performance. o Low power consumption. o High data throughput. o Low system cost. o High reliability. o Easy to use.
AVR32 AP7
o High CPU perfromance. o Low power consumption. o SIMD / DSP instructions. o Instruction & data caches. o Memory management unit. o Built for embedded Linux
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 9 2.3. Ada apa dengan Mikrokontroler AVR ATMega16?
O tidak apa-apa! Dalam buku saya ini memang sengaja menggunakan mikrokontroler AVR ATMega16 karena fitur-fitur yang dibutuhkan. Tentu saja Anda bisa menggunakan tipe AVR lainnya, apakah yang 40 pin atau yang kurang dari itu, bisa ATMega88, ATMega16, ATMega128, ATMega8535, ATMega168 dan lain sebagainya.
2.3.1. Ringkasan Fitur-fitur Mikrokontroler AVR ATMega16
Berikut ini saya ringkaskan berbagai macam fitur-fitur untuk Mikrokontroler AVR ATMega16 atau Atmega16L (Mikrokontroler AVR 8-bit dengan Flash ISP 16kByte) langsung dari datasheet-nya, maaf juga masih sebagian besar dalam Bahasa Inggris3...
• Mikrokontroler AVR 8-bit daya-rendah dengan unjuk-kerja tinggi. • Arsitektur RISC tingkat lanjut
– 131 Instruksi yang ampuh – Hampir semuanya dieksekusi dalam satu detak (clock) saja – 32 x 8 General Purpose Working Registers
– Operasi statis penuh
– Throughput hingga 16 MIPS pada 16 MHz – Pengali On-chip 2-cycle
• High Endurance Non-volatile Memory segments
– 16K Bytes of In-System Self-programmable Flash program memory – 512 Bytes EEPROM
– 1K Byte Internal SRAM
– Write/Erase Cycles: 10,000 Flash/100,000 EEPROM – Data retention: 20 years at 85°C/100 years at 25°C – Optional Boot Code Section with Independent Lock Bits
In-System Programming by On-chip Boot Program True Read-While-Write Operation
– Programming Lock for Software Security • Antarmuka JTAG (IEEE std. 1149.1 Compliant)
– Boundary-scan Capabilities According to the JTAG Standard – Extensive On-chip Debug Support
– Programming of Flash, EEPROM, Fuses, and Lock Bits through the JTAG Interface • Fitur-fitur periferal
– Dua Pewaktu/Pencacah 8-bit dengan Praskalar dan Mode Pembanding terpisah.
– Sebuah Pewaktu/Pencacah 16-bit Timer/Counter Dengan Praskalar, Mode Pembanding dan Capture yang terpisah.
– Pencacah Real Time dengan Osilator terpisah – Empat kanal PWM
– 8-kanal, 10-bit ADC
8 Single-ended Channels
7 Differential Channels in TQFP Package Only
2 Differential Channels with Programmable Gain at 1x, 10x, or 200x – Byte-oriented Two-wire Serial Interface
– Programmable Serial USART – Master/Slave SPI Serial Interface
– Pewaktu Watchdog yang bisa diprogram dengan Osilator On-chip yang terpisah – Komparator Analog On-chip
• Fitur-fitur Mikrokontroler khusus
3
Jika Anda bingung dengan istilah-istilah pada fitur-fitur ini silahkan merujuk ke datasheet aslinya, sehingga fokus pada buku ini tidak melulu pada datasheet...
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 10 – Reset saat Power-on dan Deteksi Brown-out yang bisa diprogram
– Internal Calibrated RC Oscillator – Sumber interupsi Eksternal dan INternal
– Enam Mode Sleep: Idle, ADC Noise Reduction, Power-save, Power-down, Standby and Extended Standby
• I/O and Packages
– 32 Programmable I/O Lines
– 40-pin PDIP, 44-lead TQFP, and 44-pad QFN/MLF • Tegangan kerja
– 2.7 - 5.5V untuk Atmega16L – 4.5 - 5.5V untuk Atmega16 • Kecepatan (frekuensi clock)
– 0 - 8 MHz untuk Atmega16L – 0 - 16 MHz untuk Atmega16
• Konsumsi daya pada 1 MHz, 3V, 25°C for Atmega16L – Aktif: 1.1 mA
– Idle Mode: 0.35 mA – Mode Power-down: < 1 μA
INFORMASI PELATIHAN MIKROKONTROLER, PLC DAN LAIN-LAIN
HTTP://KLIKDISINI.COM/PELATIHANAVR
2.3.2. Diagram Pin dan Diagram Blok Mikrokontroler AVR ATMega16
Pada Gambar 4 dan 5 ditunjukkan diagram pin, masing-masing, untuk Mikrokontroler AVR ATMega16 tipe PDIP dan TQFP/MLF atau dikenal sebagai SMD.
Gambar 4. Diagram Pin Mikrokontroler AVR ATMega16 tipe PDIP
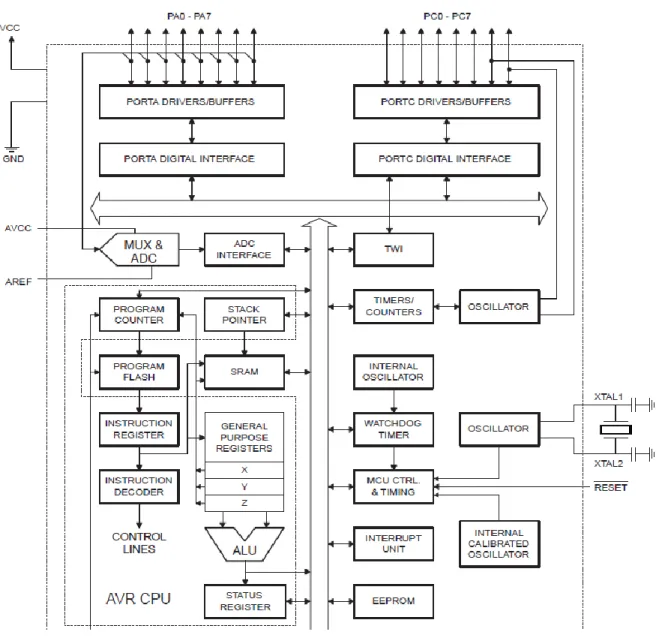
Pada Gambar 6 dan 7 ditunjukkan diagram blok untuk Mikrokontroler AVR ATMega16, perhatikan begitu banyaknya fitur-fitur dalam diagram blok tersebut, sebagaimana juga sudah saya kutipkan pada bagian sebelumnya.
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 11
Gambar 5. Diagram Pin Mikrokontroler AVR ATMega16 tipe SMD
2.3.3. Penjelasan Singkat Pin-pin pada Mikrokontroler AVR ATMega16
Berikut kita jelaskan secara singkat fungsi dari masing-masing PIN pada Mikrokontroler AVR ATMega16.
Vcc Masukan tegangan catu daya
GND Ground, emang apalagi kalau bukan ground...
Port A (PA7..PA0) Port A berfungsi sebagai masukan analog ke ADC internal pada mikrokontroler ATMega16, selain itu juga berfungsi sebagai port I/O dwi-arah 8-bit, jika ADC-nya tidak digunakan. Masing-masing pin menyediakan resistor pull-up internal4 yang bisa diaktifkan untuk masing-masing bit.
Port B (PB7..PB0) Port B berfungsi sebagai sebagai port I/O dwi-arah 8-bit.Masing-masing pin menyediakan resistor pull-up internal yang bisa diaktifkan untuk masing-masing bit.
Port B juga memiliki berbagai macam fungsi alternatif, sebagaimana ditunjukkan pada Tabel 1
Port C (PC7..PC0) Port C berfungsi sebagai sebagai port I/O dwi-arah 8-bit.Masing-masing pin menyediakan resistor pull-up internal yang bisa diaktifkan untuk masing-masing bit.
Port C juga digunakan sebagai antarmuka JTAG, sebagaimana ditunjukkan pada Tabel 2
Port D (PD7..PD0) Port D berfungsi sebagai sebagai port I/O dwi-arah 8-bit.Masing-masing pin menyediakan resistor pull-up internal yang bisa diaktifkan untuk masing-masing bit.
Port D juga memiliki berbagai macam fungsi alternatif,
4
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 12
sebagaimana ditunjukkan pada Tabel 3
/RESET Masukan Reset. Level rendah pada pin ini selama lebih dari lama waktu minimum yang ditentukan akan menyebabkan reset, walaupun clock tidak dijalankan.
XTAL1 Masukan ke penguat osilator terbalik (inverting) dan masukan ke rangkaian clock internal.
XTAL2 Luaran dari penguat osilator terbalik
AVCC Merupakan masukan tegangan catu daya untuk Port A sebagai ADC, biasanya dihubungkan ke Vcc, walaupun ADC-nya tidak digunakan. Jika ADC digunakan sebaiknya dihubungkan ke Vcc melalui tapis lolos-bawah (low-pass filter).
AREF Merupakan tegangan referensi untuk ADC
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 13
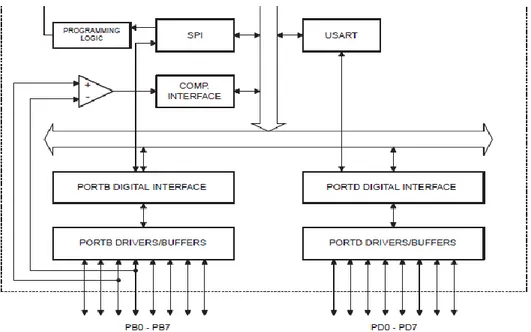
Gambar 7. Diagram blok Mikrokontroler AVR ATMega16 – Bagian II
Pada Tabel 1, 2 dan 3 ditunjukkan masing-masing alternatif fungsi dari Port B, Port C dan Port D. Dalam buku saya ini sengaja penjelasan dari masing-masing fungsi tersebut (kecuali antarmuka JTAG) akan dibahas pada saat digunakan, sehingga Anda bisa memahami langsung dengan mencoba, istilah kerennya “Learning by Doing”...
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 14
Tabel 2. Alternatif fungsi PORTC
Tabel 3. Alternatif fungsi PORTD
INFORMASI PELATIHAN MIKROKONTROLER, PLC DAN LAIN-LAIN
HTTP://KLIKDISINI.COM/PELATIHANAVR
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 15
3. Pengenalan Bahasa C untuk Mikrokontroler AVR
Bahasa C luas digunakan untuk pemrograman berbagai jenis perangkat, termasuk mikrokontroler, khususnya seri AVR dari Atmel. Ada yang menyebutkan bahwa bahasa ini merupakan High Level Language sisanya menyebut sebagai Midle Level Language. Dengan demikian seorang programmer dapat menuangkan (menuliskan) algoritmanya dengan mudah.
3.1. Struktur Penulisan Bahasa C
Perhatikan struktur penulisan dalam Bahasa C sebagai berikut...
#include < [library1.h] > // Opsional #define [nama1] [nilai]; // Opsional [global variables] // Opsional
[functions] // Opsional
int main(void) // Program Utama
{
[Deklarasi local variable/constant] [Isi Program Utama]
}
Keterangan:
Opsional artinya boleh ditulis boleh tidak, menyesuaikan kebutuhan – tuliskan pustaka apa saja yang digunakan dan lain sebagainya
Penulisan variabel dilakukan di awal agar aman bisa digunakan sepanjang program, demikian juga dengan deklarasi fungsi-fungsi yang terlibat
Silahkan ikuti (baca) terus tutorial ini untuk melihat contoh-contoh program di bagian lain tutorial ini.
3.2. Tipe-tipe data dalam Bahasa C char : 1 byte ( -128 s/d 127 )
unsigned char : 1 byte ( 0 s/d 255 ) int: 2 byte ( -32768 s/d 32767 )
unsigned int: 2 byte ( 0 s/d 65535 ) long: 4 byte ( -2147483648 s/d 2147483647 ) unsigned long: 4 byte ( 0 s/d 4294967295 ) float: bilangan desimal
array: kumpulan data-data yang sama tipenya.
3.3. Deklarasi Variabel dan Konstanta
Variabel adalah memori penyimpanan data yang nilainya dapat diubah-ubah. Penulisan :
[tipe data] [nama] = [nilai];
Konstanta adalah memori penyimpanan data yang nilainya tidak dapat diubah. Penulisan :
const [nama] = [nilai];
Global variable atau constant dapat diakses di seluruh bagian program.
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 16 3.4. Pernyataan
Statement atau pernyataan adalah setiap operasi dalam pemrograman, harus diakhiri dengan [;] atau [}]. Pernyataan tidak akan dieksekusi bila diawali dengan tanda [//] untuk satu baris. Lebih dari 1 baris gunakan pasangan [/*] dan [*/]. Pernyataan yang tidak dieksekusi disebut juga komentar. Contoh:
suhu=adc/255*100; //contoh rumus perhitungan suhu 3.5. Fungsi
Function atau fungsi adalah bagian program yang dapat dipanggil oleh program utama. Penulisan :
[tipe data hasil] [nama function]([tipe data input 1],[tipe data input 2]) {
[pernyataan_1]; [pernyataan_2]; ...
}
3.6. Pernyataan berkondisi dan Pengulangan
if else: digunakan untuk menyeleksi satu atau beberapa kondisi
if ( [persyaratan] ) { [statement1]; [statement2]; ... } else { [statement3]; [statement4]; ... }
for : digunakan untuk pengulangan dengan jumlah yang sudah diketahui – berapa kali diulang.
for ( [nilai awal] ; [syarat] ; [operasi nilai] ) {
[statement1]; [statement2]; ...
}
while: digunakan untuk pengulangan (looping) jika dan sealama memenuhi suatu kondisi masih dipenuhi (pengulangan selama benar
while ( [persyaratan] ) { [statement1]; [statement2]; ... }
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 17 do { [statement1]; [statement2]; ... } while ([persyaratan])
switch case: digunakan untuk seleksi dengan banyak kondisi
switch ( [nama variabel] ) {
case [nilai1]: [statement1]; break;
case [nilai2]: [statement2]; break;
... }
3.7. Operasi Logika dan Bilangan Biner
Operator Logika AND: && NOT: ! OR : || Biner AND: & OR : | XOR : ^ Shift right: >> Shift left : <<
Lebih besar sama dengan: >= Lebih kecil/besar: < , > Lebih kecil sama dengan : <=
3.8. Operasi Aritmetika
Operator Keterangan
+, -, *, / Tambah, kurang, kali dan bagi +=, -=, *=, /=
Nilai di sebelah kiri operator ditambah, dikurangi, dikali atau dibagi dengan nilai di
sebelah kanan operator.
% Sisa pembagian
++, -- Ditambah 1 (increment) atau dikurangi satu (decrement)
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 18
Contoh:
a = 5 * 6 + 2 / 2 – 1 hasilnya 30
a *= 5 jika nilai awal a=30, maka hasilnya 150 a += 3 jika nilai awal a=30, maka hasilnya 33 a++ jika nilai awal a=5, maka hasilnya 6
a-- jika nilai awal a=5, maka hasilnya 4, dst
3.9. Pengulangan Terus-menerus atau Infinite Looping
Apa itu Pengulangan terus-menerus atau infinite looping? Yaitu suatu pengulangan atau kalang (loop) yang dilakuka terus-menerus tanpa batas, hingga rangkaian tidak lagi mendapatkan sumber catu daya.
Yang perlu Anda ingat, bahwa kode-kode program yang dijalankan, dalam kaidah Bahasa C, adalah yang ada di fungsi utama atau main, seperti contoh berikut...
void main() {
// pernyataan-pernyataan program }
Program akan dijalankan berurutan dari atas ke bawah dan program tersebut hanya akan dijalankan sekali saja. Jika menggunakan infinite loop (ada yang mengatakan sebagai pengulangan tak-hingga atau kalang tak-hingga, gak masalah, artinya sama saja kok), maka program yang ada di dalam pengulangan tersebut akan dijalankan berulang-ulang terus-menerus, contoh...
void main() {
// pernyataan-pernyataan program
while (1); // infinite loop
{
// pernyataan2 }
}
Untuk keluar dari infinite looping gunakan perintah break;
Mengapa terjadi Infinite Looping ?? Perhatikan pada contoh tersebut, pernyataan atau instruksi while (1) menyatakan bahwa kondisi SELALU BENAR, sehingga selalu dilakukan pengulangan terus-menerus! Coba bedakan dengan contoh berikut...
void main() {
// pernyataan-pernyataan program
while (index<5); // infinite loop
{
// pernyataan2 Index += 1; }
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 19
Program di dalam kurung kurawa setelah instruksi while (index<5) akan dijalankan selama nilai dari index kurang dari 5, index merupakan variabel sehingga nilainya bisa berubah. Nah, jika index lebih dari atau sama dengan 5, maka pengulangan dihentikan.
INFORMASI PELATIHAN MIKROKONTROLER, PLC DAN LAIN-LAIN
HTTP://KLIKDISINI.COM/PELATIHANAVR
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 20
4. Menggunakan AVR Studio 4 dengan WinAVR GCC
AVR Studio 4 merupakan perangkat lunak gratis (free software) yang bisa anda unduh di internet melalui websitenya Atmel5. Perangkat lunak ini bisa Anda gunakan untuk menulis program bahasa mesin (assembly) dan, jika diintegrasikan dengan winAVR GCC6, bahasa C, mensimulasi program yang Anda buat7 dan kemudian mendebug program sehingga menghasilkan berkas dengan ekstensi .hex yang bisa anda unduh kedalam IC mikrokontroller anda.
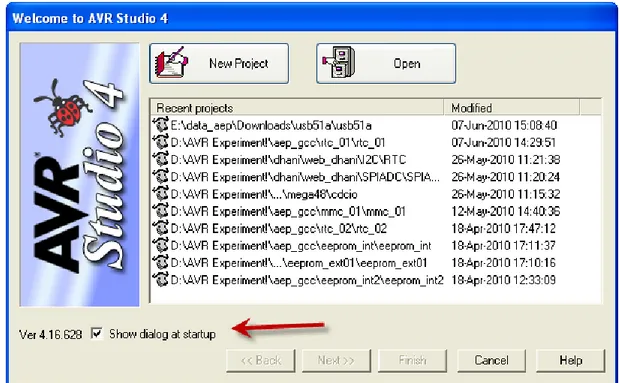
Untuk pertama kali, Anda harus melakukan instalasi AVR Studio 4 ini ke komputer anda, jika ingin diintegrasikan dengan WinAVR GCC, lakukan instalasi WinAVR GCC terlebih dahulu sebelum AVR Stdui 4.0. Cara menginstalnya pun mudah layaknya anda menginstal perangkat lunak komputer yang lain. Gambar 8 adalah contoh tampilan utama dari AVR Studio 4.0 saat pertama kali Anda jalankan.
Gambar 8. Tampilan awal AVR Studio 4.0 – Wizard Dialog
Tampilan yang ditunjukkan pada Gambar 8 bukan merupakan tampilan utama dari AVR Studio 4, melainkan kotak dialog wizard yang akan menuntun kita, khususnya, membuat program baru (lihat pada tanda panah, bahwa dialog ini diaktifkan setiap kali AVR Studio 4 dijalankan, hilangkan tanda centang jika Anda tidak ingin mengaktifkan kotak dialog ini di awal program).
Okey, sekarang kita klik New Project, sehingga akan ditampilkan pilihan dan isian-isian yang ditunjukkan pada Gambar 9.
Perhatikan tanda panah di Gambar 9, lakukan pilihan bahasa apa yang akan Anda gunakan, apakah Atmel AVR Assembler atau AVR GCC? Karena kita akan belajar pemrograman mikrokontroler AVR menggunakan Bahasa C, maka dipilih AVR GCC.
5 http://www.atmel.com 6 Unduh WinAVR GCC di 7
Pengertian simulasi disini adalah simulasi dalam tingkat register bukan simulasi dengan piranti (device). Jika Anda menginginkan simulasi dengan rangkain dan piranti, gunakan free software lainnya yaitu VMLAB yang bisa diunduh di http://amctools.com/download.htm (versi terbaru saat ebook ini ditulis adalah v3.15)
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 21
Langkah berikutnya adalah, perhatikan tanda panah di Gambar 10, mengisi Project name (atau nama proyek), Initial file (nama file utama proyek yang bersangkutan) dan Location (tempat menyimpan proyek Anda, klik pada tanda panah jika Anda menginginkan lokasi lainnya). Kemudian klik Next jika sudah selesai. Kemudian ditampilkan Gambar 11.
Gambar 9. Halaman 2 kotak dialog wizard
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 22
Gambar 11. Halaman 3 kotak dialog wizard – memilih mikrokontroler AVR
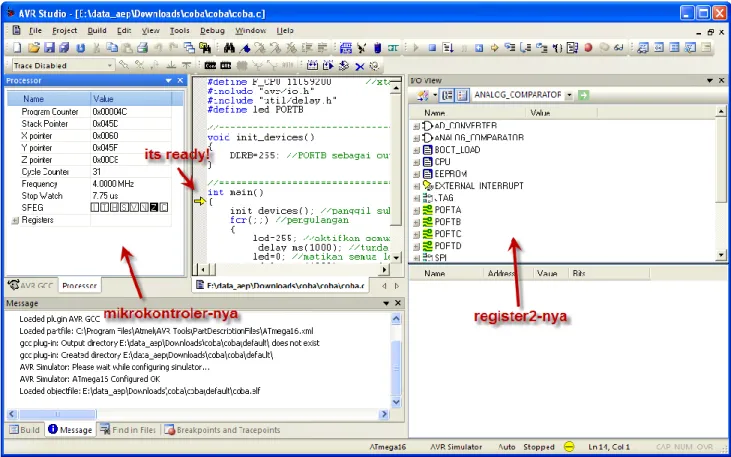
Langkah selanjutnya adalah memilih mikrokontroler AVR yang digunakan, perhatikan tanda panah pada Gambar 11, dan akhiri dengan klik Finish. Sehingga ditampilkan jendela utama dari AVR Studio 4, sebagaimana ditunjukkan pada Gambar 12, dengan editor (perhatikan tanda panah pada Gambar 12) siap digunakan untuk mengetikkan program Anda.
Gambar 12. Jendela utama AVR Studio 4
Okey, misalnya sekarang kita ketikkan program berikut, ketik saja dulu, ntar kita terangkan atau berikan penjelasan tentang program ini di halaman-halaman berikutnya...
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 23 /* * led_01.c * * Created: 19/07/2011 15:44:08 * Author: agfianto68 */ // program LED01.C
// menghidupkan lampu LED pada PORTB #define F_CPU 11059200
#include "avr/io.h" #define led PORTB
//=========================================== void init_devices() { DDRB=255; } //==========================================program utama int main() { init_devices(); led=255; } //===========================================
Simpan berkas (program) Anda dengan Ctrl+S atau pilih menu File Save. Kemudian lakukan kompilasi (tekan F7), jika tidak ada kesalahan akan ditampilkan laporan seperti contoh berikut...
Wow! Anda sudah berhasil membuat program mikrokontroler AVR Anda yang pertama, selamat ya! Luar biasa!
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 24
Lha terus habis gini ngapain? Oya, Anda langsung bisa mensimulasikan-nya (Ctrl+Shift+Alt+F5) dengan AVR Studio 4 (perhatikan Gambar 13) atau men-download-kan hex-nya ke board mikrokontroler AVR Anda8.
Gambar 13. Jendela Debugger AVR Studio 4
Okey, sampai disini pendahuluan AVR Studio 4-nya, sekarang kita mulai bahas konsep pemrogramannya, antara lain:
Konsep Masukan/Luaran atau I/O, dan
Timer/Counter pada Mikrokontroler AVR
8
Untuk urusan mendownload program (HEX) ke mikrokontroler silahkan merujuk ke artikel saya yang terkait di ??, dan ikuti diskusi-nya.
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 25
5. Masukan/Luaran (I/O) pada Mikrokontroler AVR
Mohon silahkan melihat kembali berbagai macam fitur ATMega16 (sebagai contoh mikrokontroler AVR) pada halaman-halaman sebelum ini. Salah satunya adalah memiliki 4 x 8 saluran masukan dan luaran digital (berlogika 0 atau 1), totalnya 32 bit atau 32 pin! Masing-masing diberi nama A, B, C dan D (masing-masing 8 pin atau 8 bit).
Kali ini kita akan membahas tentang hal dasar berkaitan dengan konsep I/O atau masukan/luaran pada mikrokontroler AVR:
Membaca tingkat tegangan masukan, apakah berlogika 0 (tegangan disekitar 0 volt) atau 1 (tegangan sekitar 5 volt maksimal);
Mengeluarkan tingkat tegangan 0 (sekitar 0 volt) atau 1 (sekitar 5 volt);
Untuk keperlua tersebut, AVR memiliki beberapa register yang terkait, yaitu DDRx, PORTx dan PINx9, berikut penjelasan masing-masing...
5.1. Register DDRx
Digunakan untuk menentukan apakah sebuah pin pada sebuat PORT (A, B, C atau D) sebagai masukan atau luaran atau disebut sebagai arah (direction) dari pin yang bersangkutan:
Berikan logika 1 (satu) pada bit yang terkait agar dijadikan sebagai luaran atau output.
Berikan logika 0 (nol) pada bit yang terkait agar dijadikan sebagai masukan atau input.
Misal PORTA semua bit akan digunakan sebagai masukan, maka untuk mengaturnya kita gunakan perintah...
DDRA= 0x00; //seluruh pin-pin pada Port A digunakan sebagai input
Misalnya lagi, PORTA.0 akan dijadikan masukan sedangkan PORTA.2 sampai PORTA.7 akan digunakan sebagai luaran, maka perintahnya...
DDRA= 0xFE;
Perhatikan 0xFE (heksa) = 0b11111110 (biner), perhatikan baik-baik konversi biner ini, setiap bit nilai biner mewakili Pin-Pin pada PortA.
5.2. Register PORTx
Sebagaimana dijelaskan sebelumnya, jika sebuah PORT, semua atau sebagian, dikonfigurasi sebagai masukan, maka register ini berfungsi sebagai penentu apakah kondisi pin yang terkait di-pullup atau
Floating. Begitu juga jika dikonfigurasi sebagai luaran, maka register ini menentukan kondisi pin
yang terkait terbaca HIGH atau LOW. Untuk memahami hal ini, perhatikan Gambar 14.
9
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 26
Gambar 14. Kondisi pullup pada suatu PORT
Penjelasan: Jika PIN.1 dihubungkan ke VCC (tegangan 5 Volt) melalui resistor (R), maka inilah yang di maksud dengan pullup. Saat tidak ada tegangan dari luar, PIN.1 akan cenderung berkondisi HIGH (logika 1). Sedangkan PIN.2 dibiarkan begitu saja sehingga kondisi logik dari PIN.2 begitu rentan terhadap pengaruh disekitarnya. PIN.2 bisa berlogika HIGH, bisa juga berlogika LOW, ini artinya logika PIN.2 mengambang (floating).
Kondisi floating biasanya diperlukan saat PIN sebuah mikrokontroler dihubungkan ke suatu sensor. Karena jika di pullup, dikhawatirkan kondisi logik PIN tersebut mengganggu kondisi logik pin-pin sensor yang bersangkutan.
Perhatikan contoh-contoh berikut... DDRA=0x00;
PORTA = 0xFF;
Ini berarti seluruh pin-pin pada PORTA dijadikan sebagai masukan dan di-pullup, artinya pada rangkaian yang terkait, jika menggunakan tombol atau pushbutton, jika tidak ditekan akan terbaca HIGH dan jika ditekan akan terbaca LOW. Gunakan contoh rangkaian pada Gambar 15 dan perhatikan tanda panah, pushbutton satu ujung dihubungkan ke pin yang terkait sedangkan ujung lainnya di-GND-kan. INGAT! Ini bukan satu-satu-nya cara membuat rangkaian masukan dengan pushbutton, tetapi ini cara yang mudah dan murah meriah... he he he...
Contoh lainnya... DDRB= 0x00; PORTB=0x0F;
Ini artinya seluruh pin-pin PORTB dijadikan masukan, dengan konfigurasi 0x0F (0b00001111) atau PORTB.0 sampai PORTB.3 di-pullup, sedangkan PORTB.4 sampai PORTB.7 dikonfigurasi floating.
5.3. Register PINx
Digunakan untuk membaca masukan pada pin yang bersangkutan, akan dijelaskan pada contoh program di halaman-halaman berikutnya.
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 27
Gambar 15. Contoh rangkaian aktif rendah tombol pushbutton.
5.4. Percobaan-1: LED berkedip-kedip
Percobaan pertama ini menggunakan rangkaian yang ditunjukkan pada Gambar 1610, sedangkan contoh penempatan LED dan pushbutton (percobaan-3) pada AVR Trainer v2.0 ditunjukkan pada Gambar 17.
Gambar 16. Rangkaian LED pada PORTB mikrokontroler ATMega16
10
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 28
Gambar 17. Penempatan LED dan Pushbutton pada AVR Trainer v2.0 Listing program ditunjukkan sebagai berikut...
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 29
Baris 1 – 4 merupakan deklarasi untuk definisi kristal yang digunakan, yaitu 11.0592MHz11. Pustaka apa saja yang digunakan (baris 2 dan 3) dan alias untuk PORTB sebagai led (baris 4);
Baris 7- 10 merupakan subrutin untuk inisialisasi PORTB sebagai luaran (baris 9). Perhatikan bahwa DDRB diberi logika 1 semua (=0xFF atau 255 desimal);
Program utama ditunjukkan pada baris 13 – 23, diawali dengan inisialisasi port (baris 15), kemudian dilakukan pengulangan tak-hingga (baris 16);
Yang dilakukan adalah menyalakan LED, dengan cara memberikan logika 1 (baris 18), kemudian melakukan penundaan 1 detik (baris 19), kemudian mematikan LED dengan logika 0 (baris 20) dan diakhiri dengan penundaan 1 detik (baris 21);
Demikian seterusnya, LED akan berkedip-kedip dengan tundaan 1 detik. 5.5. Percobaan-2: Membunyikan buzzer!
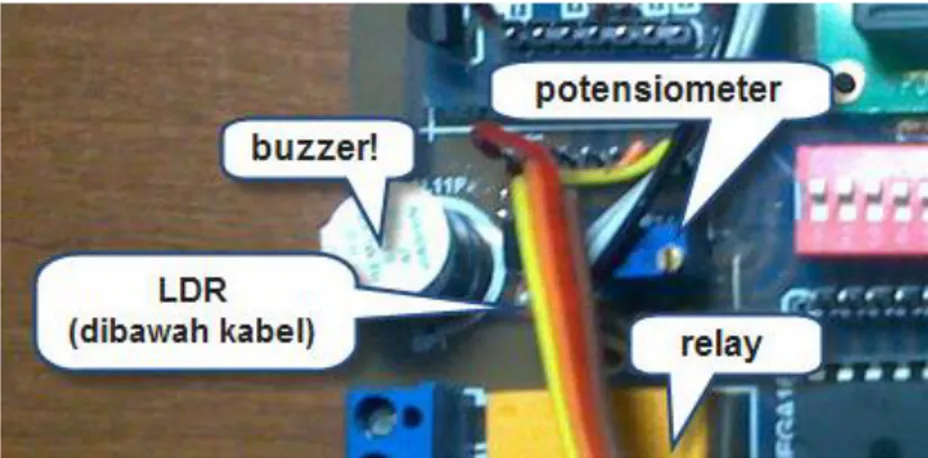
Masih menggunakan rangkaian yang sama seperti sebelumnya, sekarang buzzer juga akan dibunyikan, penempatan buzzer pada AVR Trainer v2.0 dtinjukkan pada Gambar 18.
Gambar 18. Buzzer pada AVR Trainer Board v2.0 Perhatikan listing berikut ini...
[lihat halaman berikut] Penjelasan:
Baris 2 – 5 sama seperti penjelasan pada percobaan-1;
Baris 8 dan 9 digunakan untuk mendeklarasikan suatu instruksi untuk memberikan nilai pada PORTA.7 dengan nilai logika 1 (baris 8) dan logika 0 (baris 9);
Selebihnya adalah program utama (baris 19 – 31), silahkan Anda pelajari dengan seksama.
11
Silahkan membaca artikel saya yang menjelaskan tentang masalah sistem clock pada mikrokontroler AVR di
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 30 5.6. Percobaan-3: Aplikasi Pushbutton untuk ON/OFF LED
Kali ini menggunakan rangkaian pushbutton yang terhubung ke PORTB (ditunjukkan pada Gambar 15. Ada 2 tombol, satu untuk menyalakan LED dan yang .lain untuk mematikan LED, berikut listing programnya...
[lihat halaman berikut] Penjelasan:
Baris 1 - 4 sudah jelas khan? Belum? Ya monggo, silahkan lihat dulu atau baca lagi penjelasan dari percobaan-percobaan sebelumnya, jika sudah paham silahkan kembali lagi kesini...
Baris 6 – 8 digunakan untuk mendeklarasikan 3 macam alias, yaitu „tombol‟, „satu‟ dan „dua‟. Jika Anda perhatikan, khusus tombol didefinisikan sebagai register PIND, sebagaimana janji saya sebelumnya register PINx saya jelaskan disini, yaitu digunakan untuk membaca masukan. Artinya untuk memberikan luaran melalui register PORTx sedangkan untuk membaca masukan gunakan register PINx;
Perhatikan sekarang pada rutin init_devices() yang berbeda dengan sebelumnya (baris 11 – 18): o DDRB=255 sama seperti sebelumnya, PORTB semuanya dijadikan sebaga saluran luaran;
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 31 o PORTD.2 dan PORTD.3 digunakan sebagai saluran masukan, sehingga harus diberi logika „0‟, caranya bagaimana? Anda bisa langsung memberikan instruksi DDRD = 0b00001100 atau DDRB = 0x0C;
o DDRD &= ~(1<<2) untuk PORTD.2 (tanda „~” artinya NOT), dan DDRD &= ~(1<<3) untuk PORTD.3, perhatikan masing-masing baris 14 dan 15;
o Karena rangkaian pushbutton menggunakan konfgurasi active low12
, maka kedua pin tersebut diaktifkan pullup-nya, menggunakan instruksi masing-masing PORTD |= (1<<2) untuk PORTD.2 dan PORTD |= (1<<3) untuk PORTD.3, perhatikan baris 16 dan 17.
Program utama dimulai dari baris 20 hingga 29: o Diawali dengan inisialisasi device pada 22;
o Dilanjutkan dengan mematikan semuan led, baris 23;
o Yang diulang-ulang terus menerus menggunakan instruksi for (;;) {..}, sebagaimana dituliskan pada baris 24 hingga 28, adalah proses memeriksa apakah tombol yang dihubungkan ke PIND.2 ditekan? Atau justru tombol di PIND.3 yang ditekan:
Jika tombol yang ada di PIND.2 ditekan maka led dinyalakan semua (baris 26), sebaliknya
Jika tombol yang ada di PIND.3 ditekan maka led dimatikan semua (baris 27)!
Mudah bukan?
12
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 32
6. Timer/Counter dan Watchdog pada Mikrokontroler AVR
Timer/Counter dalam mikrokontroler merupakan fasilitas yang salah satu fungsinya dapat digunakan sebagai pewaktu atau cacahan suatu event. Sumber clock atau pemicau dapat dibangkitkan dari sinyal eksternal maupun internal.
Jika sumber sinyal pemicu atau clock berasal dari internal maka Timer/Counter berfungsi sebagai pewaktu atau timer dan jika sumber sinyal berasal dari luar maka disebut sebagai pencacah atau
counter.
Mikrokontroler ATMega16 memiliki 3 buah timer yaitu Timer0, Timer1 dan Timer2. Timer0 dan Timer2 memiliki kapasitas 8-bit sedangkan Timer1 memiliki kapasitas 16-bit. Apa yang dimaksud timer 8 bit dan 16 bit?
Timer 8-bit adalah pewaktu yang bisa mencacah atau menghitung hingga maksimal nilai 0xFF heksa (dalam biner = 11111111).
Timer 16-bit sama seperti timer 8-bit, hanya saja nilai maksimalnya mencapai 0xFFFF. Pada ebook ini akan dibahas mengenai Timer1, 16-bit, dan untuk dapat menjalankan atau menggunakan Timer1 ini, maka kita harus mempelajari terlebih dulu register-register yang berkaitan dengan Timer1 karena di register itulah tempat pengaturan Timer/Counter1 agar bisa bekerja.
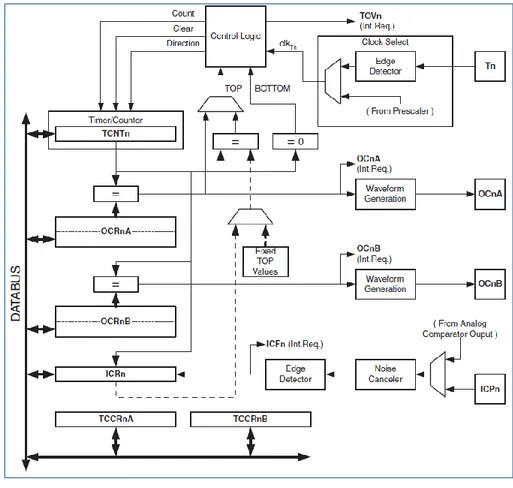
Pada Gambar 19 ditunjukkan diagram blok dari Timer1 16-bit, terlihat adanya beberapa register yang terkait, antara lain (dari atas): TCNT1, OCR1A, OCR1B, ICR1, TCCR1A, TCCR1B dan juga beberapa bit-bit terkait seperti: TOV1, OC1A, OC1B dan ICF1.
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 33
Register Timer1 yang akan kita libatkan di awal ini adalah: TCCR1B
TCNT1 TIMSK TIFR
Register TCCR1B, ditunjukkan pada Gambar 20, merupakan tempat pengaturan clock yang intinya agar Timer/Counter1 bisa bekerja, maka register TCCR1B ini jangan sampai diisi dengan 0x00 (dikosongkan).
Gambar 20. Register TCCR1B
Kok tidak boleh berisi 0x00 atau semua bit pada TCCR1B nol semua? Coba perhatikan Tabel 4. Sumber clock bisa berasal dari internal mulai dari prescaler 1 hingga 1024 atau bisa juga dari sumber eksternal, semua bisa diatur sesuai atau mengikuti aturan pada Tabel 4.
Apa nilai praskalar itu? Timer1 (juga timer/counter lainnya) membutuhkan sumber detak atau clock source. Biasanya sumber detak yang biasa kita pakai berasal dari XTAL. Besarnya maksimum sama dengan XTAL yang digunakan dan minimum XTAL/1024. Nah nilai pembagi atau 1024 ini-lah yang disebur nilai praskalar atau prescaler.
Apa yang terjadi jika semua bit di TCCR1B nol semua? Artinya bit 0, 1 dan 2 juga nol semua, perhatikan Gambar 19, itu artinya CS12=0, CS11=0 dan CS10=0 dan itu menurut Tabel 4 “No clock
source (Timer/Counter stopped)” Timer berhenti bekerja! Atau tidak bekerja!!
Tabel 4. Konfigurasi sumber clock atau detak pada TCCR1B
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 34
Okey! Register TCNT1 merupakan register pencacah, artinya nilai di dalamnya akan dinaikkan setiap kali ada pemicu, bisa tepi naik atau tepi turun. Jika sumbernya dari dalam (internal) pencacahan dilakukan pada saat tepi naik. Register ini akan mencacah naik dari 0x0000 sampai nilai max 0xFFFF kemudian di-reset kembali lagi ke 0x0000.
Overflow (melimpah) terjadi saat kondisi dari 0xFFFF ke 0x0000, sehingga mengakibatkan bit TOV1 pada register TIFR akan di-set (diberi logika 1). Kondisi overflow juga bisa digunakan untuk menjalankan interrupsi.
Register TIMSK, yang ditunjukkan pada Gambar 21, merupakan register tempat pengaturan interupsi overflow dari Timer/Counter1 yang ingin diaktifkan atau tidak. Dengan memberikan logika 1 pada bit TOIE1 (bit-2 pada TIMSK), maka interupsi Timer/Counter1 aktif dengan catatan bit interupsi global diaktifkan (bit-7 di register Status SREG, perhatikan Gambar 22).
Perhatikan juga bit-bit lain yang berkaitan dengan masing-masing Timer: Timer/Counter-0: OCIE0 dan TOIE0 – masing-masing bit 1 dan 0;
Timer/Counter-1: TICIE1, OCIE1A, OCIE1B dan TOIE1 – masing-masing bit 5, 4, 3 dan 2;
Timer/Counter-2: OCIE2 dan TOIE2 – masing-masing bit 7 dan 6;
Gambar 21. Register TIMSK
Gambar 22. Register SREG Penjelasan register SREG13:
I – Global Interrupt Enable: digunakan untuk mengaktifkan interupsi menyeluruh (global); T – Bit copy storage
H – Half Carry Flag S – Sign bit
V – Two‟s Complement Overflow Flag N – Negative flag
Z – Zero flag C – Carry flag
13
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 35
Sedangkan register TIFR (Timer/Counter Interrupt Flag Register), sebagaimana ditunjukkan pada Gambar 23, digunakan sebagai indikator atau penanda apakah sudah terjadi overflow atau belum. Pada Timer/Counter1, kondisi overflow ditandai dengan logika 1 pada bit TOV1 (bit-2) pada register TIFR.
Gambar 23. Register TIFR
Persamaan untuk mencari waktu jeda yang ingin digunakan adalah berdasarkan nilai awal yang harus dimasukkan ke dalam TCNT1, gunakan persamaan berikut:
TCNT1 = (1+0xFFFF) - (waktu *( XTAL / praskalar) ) Waktu waktu yang diinginkan
XTAL frekuensi kristal yang dipakai
praskalar nilai prescaler (lihat penjelasan berikut ini)
6.1. Percobaan-4: Menggunakan Timer1
Menyalakan dan mematikan LED pada PORTB dengan jeda 1 detik menggunakan Timer1. Bedakan dengan Percobaan-1 dan 2 yang hanya menggunakan fungsi delay yang sama sekali tidak menggunakan fasilitas Timer/Counter.
Okey, sekarang kita cari dulu nilai TCNT1-nya...
Nilai XTAL-nya 11,0592MHz atau 11.059.200Hz;
Nilai praskalarnya 1024;
Waktu yang diinginkan 1 detik, maka
Gunakan TCNT1 = (1+0xFFFF) - (waktu *( XTAL / prescaler) ), jadi...
TCNT1 = (1+65535)-(1detik * (11059200/1024))
= 65536 - (1detik*10800) = 65536-10800
= 54736 (desimal)
= D5D0 (heksadesimal)
Alternatif lain, Anda bisa menggunakan programnya AVR Timer yang bisa diunduh melalui website
http://www.techideas.co.nz. Langkah-langkah penggunakan program ini kita jelaskan berikut:
1. Setelah mengunduh program AVR Timer dari http://www.techideas.co.nz, langkah selanjutnya adalah menjalankan AVRTimer1Clac.exe untuk perhitungan atau kalkulasi Timer1;
2. Lakukan pengisian beberapa nilai sebagaimana ditunjukkan pada Gambar 23, menyesuaikan dengan kebutuhan yang telah kita tetapkan tadi:
a. Frekuensi kristal: 11,0592MHz atau ditulis 11.059.200 Hz; b. Pilih nilai prescale sebesar 1024;
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 36 c. Isikan Timer1 Interrupts per second (berapa kali interupsi/detik) sebesar 1 kali;
d. Perhatikan hasilnya (Gambar 24).
Gambar 24. Contoh penggunaan ATMega Timer Calculator – TIMER1 Listing programnya...
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 37
Penjelasan:
Program ini pada dasarnya sama seperti percobaan-1, hanya saja sekarang tundaan atau jeda menggunakan fasiltas Timer1 yang ada di ATMega16;
Cukup saya jelaskan saja subrutin delay1detik(), yang lainnya sama seperti penjelasan percobaan-percobaan sebelumnya:
o Baris-15 merupakan pengisian register TCCR1B agar digunakan nilai prescale sebesar 1024, artinya nilai kristal 11,0592MHz dibagi dengan 1024, sekaligus mengaktifkan Timer1;
o Baris-16 memberikan nilai awal pada TCNT1 sesuai dengan perhitungan atau kalkulasi yang telah dilakukan sebelumnya, yaitu mengisi dengan nilai awal 54.736 (desimal) atau 0xD5D0 (heksadesimal);
o Baris-17 menunggu hingga terjadi overflow – ini merupakan proses pooling bukan interupsi; o Jika sudah terjadi overflow atau melimpah, maka flag TOV1 di-reset (baris 18) dan Timer1
dimatikan (baris 19).
Gampang tho!?
6.2. Percobaan-5: Menggunakan Timer2
Okey sekarang saya tunjukkan contoh lainnya menggunakan Timer2 dan penggunaan AVRTimer2Calc ditunjukkan pada Gambar 25. Untuk 10 milidetik diisi 100 kali interupsi per detik.
Gambar 25. Contoh penggunaan ATMega Timer Calculator – TIMER2 // program TIMER02.C
// ON dan OFF LED pada PORTB menggunakan Timer2 // By Agfianto Eko Putra, 2010
#define F_CPU 11059200UL #include "avr/io.h" #define led PORTB
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 38
void init_devices() {
DDRB=255; }
//gunakan AVR Delay calculator untuk menghitung
//tundaan 10 milidetik dengan frek kristal 11.0592MHz void delay10ms()
{
TCCR2=0B00000111; //prescaler 1024
TCNT2=0x94; //isi ulang 0x94 agar 1 detik
while(!(TIFR&(1<<TOV2)));
TIFR=64; //TOV2 di-nolkan dengan menuliskan "1" pada bit ybs TCCR2=0B00000000;
}
void delay1detik() {
unsigned char ulang;
for(ulang=0; ulang<100; ulang++) { delay10ms(); } } int main() { init_devices(); for(;;) { led=255; delay1detik(); led=0; delay1detik(); } }
Penjelasan (waktu ngisi titik-titik jangan lihat kuncinya dulu ya):
Percobaan-5 ini sebenarnya juga mirip/sama dengan percobaan-4 (sebelumnya), hanya saja digunakan fasilitas Timer2 untuk melakukan penundaan 1 detik;
Anda perhatikan pada 12 hingga 28: o Terdapat ....14
subrutin yaitu delay10ms() dan ...15;
o Mengapa kok tidak langsung dilakukan tundaan 1 detik? Mengapa harus melakukan pengulangan ....16 kali subrutin delay10ms()? Perhatikan baris 24 – 27;
o Ingat, Timer2 merupakan timer ....17
bit, artinya dengan kemampuan seperti itu tidak bisa dilakukan langsung tundaan 1 detik, cara paling gampang untuk mendapatkan tundaan 1 detik atau 1.000 milidetik adalah mengulang 100 kali tundaan 10 milidetik;
o Perhatikan register TCCR2 bit 0, 1 dan 2 pada Gambar 23. Kemudian perhatikan juga Tabel 5 untuk semua kemungkinan nilai CS22, CS21 dan CS20.
o Nilai prescale yang digunakan, mengikuti Tabel 5, perhatikan pada baris 14, adalah sebesar ....18 atau nilai clock dibagi dengan nilai prescale tersebut;
14 Jawaban: 2 (dua) 15 Jawaban: delay1detik() 16 Jawaban: 100 (seratus) 17 Jawaban: 8 (delapan)
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 39 o Agar terjadi penundaan sekitar 10 milidetik, maka nilai register TCNT2 (pada baris 15) diberi
nilai sebesar ...19 heksadesimal atau ...20 desimal;
Gambar 26. Register TCCR2
o Baris 16 digunakan untuk menunggu terjadinya ...21
pada Timer2, kemudian bit
overflow tersebut direset (baris-17).
o Timer2 kemudian dihentikan dengan memberi nilai ...22
pada register TCCR2.
Tabel 5. Konfigurasi sumber clock atau detak pada TCCR2
6.3. Percobaan-6: Menggunakan Timer0
Bagaimana kalau menggunakan Timer0? Pengaturan pewaktuan menggunakan AVRTimer0Calc ditunjukkan pada Gambar 27. Untuk penundaan 10 milidetik sebanyak 100 kali, parameter-nya sama seperti Timer2. 18 Jawaban: 1024 19 Jawaban = 94 20
Jawaban = 148 (seratus empat puluh delapan)
21
Jawaban: overflow
22
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 40
Gambar 27. Contoh penggunaan ATMega Timer Calculator – TIMER0 Berikut listing programnya...
// program TIMER03.C
// ON dan OFF LED pada PORTB menggunakan Timer0 // By Agfianto Eko Putra, 2010
#define F_CPU 11059200UL #include "avr/io.h" #define led PORTB void init_devices() {
DDRB=255; }
//gunakan AVR Delay calculator untuk menghitung
//tundaan 10 milidetik dengan frek kristal 11.0592MHz void delay10ms()
{
TCCR0=0B00000101; //prescaler 1024
TCNT0=0x94; //isi ulang 0x94 agar 1 detik
while(!(TIFR&(1<<TOV0)));
TIFR=1; //TOV0 di-nolkan dengan menuliskan "1" pada bit ybs TCCR0=0B00000000;
}
void delay1detik() {
unsigned char ulang;
for(ulang=0; ulang<100; ulang++) {
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 41 delay10ms(); } } int main() { init_devices(); for(;;) { led=255; delay1detik(); led=0; delay1detik(); } }
6.4. Percobaan-7: Lima Kali pencacahan – aplikasi Counter // program COUNTER.C
// 5 kali pencacahan menaikkan angka pada PORTC // By Agfianto Eko Putra, 2010
#define F_CPU 11059200UL #include "avr/io.h"
#include "avr/interrupt.h" // saatnya menggunakan interupsi #define led PORTC
#define pencacah PORTD
volatile unsigned int cacah; // sbg volatile agar tetap global // di dalam ISR
ISR(TIMER0_OVF_vect) {
TCNT0=0xFB; // isi ulang 0xFB agar 5 kali saja ++cacah; // setara dengan -5 (negatif 5) }
// -- untuk aktivasi interupsi TIMER0 -- void enable_timer0()
{TIMSK|=(1<<TOIE0);}
// -- untuk deaktivasi interupsi TIMER0 -- void disable_timer0() {TIMSK&=~(1<<TOIE0);} void init_devices() { DDRC=255; DDRD=255; } int main() { init_devices();
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 42 // Inisialisasi Timer/Counter 0
// Sumber detak: pin T0 Rising Edge // Mode: Normal top=FFh
TCCR0=0x06;
// Luaran OC0 output: tidak dihubungkan OCR0=0x00;
// Nilai awal dari Timer/Counter 0 (-5 desimal) TCNT0=0xFB; enable_timer0(); sei(); cacah=1; while(1) { led = cacah; pencacah = TCNT0; } } 6.5. Tentang Watchdog
Pewaktu watchdog merupakan piranti pewaktuan perangkat keras yang bisa memicu reset sistem pada saat program utama, karena ada beberapa keasalahan, seperti hang, mengabaikan layanan rutin ke watchdog (biasanya seperti pemberian pulsa secara rutin), atau gampangannya kalo Anda punya anjing atau kucing kemudian lupa memberikan makan, apa yang terjadi? Ya jegog atau ngeong khan?? Dalam hal ini, saat jegog atau ngeong, pewaktu watchdog akan mereset sistem. Intinya, mengembalikan sistem ke awal mula (kondisi normal) karena telah terjadi kesalahan atau hang tadi…
Pewaktu Watchdog pada mikrokontroler AVR mendapatkan clock dari osilator internal 1 MHz yang tersendiri (khusus). Dengan melakukan pengontrolan Watchdog Prescaler, interval reset yang dilakukan Watchdog dapat diatur dan mengikuti Tabel 6. Gambar 28 menunjukkan diagram blok pewaktu watchdog pada mikrokontroler AVR sedangkan Gambar 29 menunjukkan register yang terlibat.
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 43
Gambar 28. Pewaktu Watchdog
Gambar 29. Register Watchdog WDTCR Kesimpulan:
Mikrokontroler AVR memiliki pewaktu Watchdog internal.
Pewaktu watchdog adalah pewaktu yang bisa me-RESET mikrokontroler saat mencapai nilai tertentu.
Selama jalannya program, pewaktu ini harus di-reset (secara manual) sebelum mencapai nilai maksimum-nya. Hal ini untuk memastikan bahwa program berjalan dengan baik dan benar (kayak bahasa Indonesia aja ya…).
Saat program mengalami masalah (hang, crash) atau diam saja pada suatu kalang, maka tidak terjadi proses reset pewaktu Watchdog sehingga RESET sistem secara otomatis akan terjadi.
6.6. Percobaan-8: Aplikasi Watchdog (Bagian-1)
Walaupun menggunakan LCD, pembahasan tentang LCD ada di bagian lain dari buku ini, sementara diikuti saja listingnya sebagai berikut...
// program WD01.C
// tampilan di LCD16x2 dan watchdog #define F_CPU 11059200UL
#include "util/delay.h" #include "stdlib.h" #include "avr/io.h" #include "avr/pgmspace.h" #include "avr/wdt.h" #include "lcd_pc.c" //#define WDTO_2S 7
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 44 #define led PORTB
#define tombol PIND #define satu 2 #define dua 3
//================================================== void init_devices()
{
DDRB=255; //PORTB sebagai luaran DDRD&=~(1<<2); //PORTD.2 sebagai masukan DDRD&=~(1<<3); //PORTD.3 sebagai masukan PORTD|=(1<<2); //PULL UP internal pada PORTD|=(1<<3); //PORTD.2 dan PORTD.3 aktif DDRC=255;
wdt_enable(WDTO_2S); // timeout WDT-nya 2 detik
// tersedia 15MS, 30MS, 60MS, dst } //==========================================program utama int main() { init_devices(); init_lcd(); led=0; lcd_goto(line1); lcd_puts("mulai awal..."); _delay_ms(100); lcd_clrscr(); while(1) { _delay_ms(1000);
wdt_reset(); //harus direset WDT-nya lcd_goto(line1); lcd_puts("watchdog mega16"); lcd_goto(line2); lcd_puts("telah direset.."); _delay_ms(1000); _delay_ms(1000); } } //=========================================== 6.7. Percobaan-9: Aplikasi Watchdog (Bagian-2) // program WD02.C
// tampilan di LCD16x2 dan watchdog serta pushbutton #define F_CPU 11059200UL
#include "util/delay.h" #include "stdlib.h" #include "avr/io.h"
#include "avr/pgmspace.h" #include "avr/wdt.h"
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 45 #include "lcd_pc.c"
//#define WDTO_2S 7 #define led PORTB #define tombol PIND #define satu 2 #define dua 3
//================================================== void init_devices()
{
DDRB=255; //PORTB sebagai luaran DDRD&=~(1<<2); //PORTD.2 sebagai masukan DDRD&=~(1<<3); //PORTD.3 sebagai masukan PORTD|=(1<<2); //PULL UP internal pada PORTD|=(1<<3); //PORTD.2 dan PORTD.3 aktif DDRC=255;
wdt_enable(WDTO_2S); //timeout WDT-nya 2 detik
//tersedia 15MS, 30MS, 60MS, dst } //==========================================program utama int main() { init_devices(); init_lcd(); led=0; lcd_goto(line1); lcd_puts("mulai awal..."); _delay_ms(100); lcd_clrscr(); while(1) { _delay_ms(1000);
wdt_reset(); //harus direset WDT-nya lcd_goto(line1);
lcd_puts("watchdog mega16"); lcd_goto(line2);
lcd_puts("telah direset..");
while (!bit_is_clear(tombol,satu)); //menunggu tombol ditekan
//jika tidak ditekan //WDT akan mereset uC }
}
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 46
7. Interupsi dan Aplikasinya
7.1. Pendahuluan Interupsi Mikrokontroler AVR
Anda bisa membayangkan sebuah sistem elektronik yang selalu mengirimkan atau menampilkan data suhu per detik dan pada saat yang bersamaan melakukan kontrol pengadukan sebuah tangki, artinya proses atau kontrol utama pada sistem tersebut hanya melakukan pengadukan isi tangki dengan kecepatan yang bergantung pada data-data suhu. Setiap detik dilakukan pembacaan data suhu, kemudian ditampilkan pada layar LCD, misalnya, dan dijadikan acuan untuk menetapkan kecepatan pengadukan.
Skenario tersebut membutuhkan mekanisme interupsi. Saat proses dilakukan secara normal, kemudian terjadi interupsi, program normal ditinggalkan terlebih dulu, mengerjakan rutin interupsi, kemudian kembali lagi mengerjakan program secara normal. Inilah konsep interupsi...!
Mikrokontroler AVR memiliki 21 macam sumber interupsi yang terdiri dari 3 interupsi eksternal dan 18 interupsi internal, sebagaimana ditunjukkan pada Tabel 7.
Copyright (c) 2011 by Agfianto Eko Putra and Dhani Nugraha - 47 7.2. Percobaan-10: ON/OFF LED menggunakan Interupsi Timer0
Percobaan ini merupakan penggunaan TIMER0 melalui interupsi, listing selengkapnya sebagai berikut...
// program INTERUPSI_TIMER01.C // ON dan OFF LED pada PORTB
// selama 1 detik menggunakan interupsi TIMER0 #define F_CPU 11059200
#include "avr/io.h"
#include "avr/interrupt.h" #define led PORTB
ISR(TIMER1_OVF_vect) {
led=!led; // toggle penyalaan LED (ON/OFF) TCNT1=0xd5d0; //isi ulang 0xD5D0 agar 1 detik TIFR=4; } void init_devices() { DDRB=255; //LED OUTPUT } //============================================== void enable_timer1() {TIMSK|=(1<<TOIE1);} void disable_timer1() {TIMSK&=~(1<<TOIE1);} void start_timer1() {TCCR1B=0B00000101;} void stop_timer1() {TCCR1B=0B00000000;} //=============================================== int main() { init_devices(); led=1; TCCR1B=0B00000101; //prescaler 1024
TCNT1=0xd5d0; //isi ulang 0xD5D0 agar 1 detik enable_timer1(); //aktivasi interupsi Timer1
sei(); //aktivasi interupsi global
start_timer1(); //jalankan Timer1
while(1); }