IV TIGA MODEL ARUS LALU-LINTAS
Masih berkaitan dengan bab sebelumnya,pada bagian ini akan dibahas tiga model untuk suatu arus lalu-lintas yang mengalir pada suatu single link. Model-model tersebut terdiri atas dua model makroskopik dan satu model mikroskopik, yaitu:
1. Model makroskopik yang menghubungkan arus keluar dan volume.
2. Model makroskopik yang menghubungkan waktu tempuh dan volume.
3. Model mikroskopik mobil pengikut. Model 1 dan model 2 digunakan untuk memperhatikan bagaimana model berperilaku pada saat kondisi lalu-lintas normal atau stabil. Dimana kondisi stabil adalah kondisi ketika arus masuk dan waktu tempuh tetap.
Pada bagian ini juga akan ditunjukkan bahwa terdapat sejumlah pemodelan matematika untuk arus lalu-lintas dengan setiap konteks memberikan interpretasi fisik yang berbeda terhadap parameter dan variabel. Akan ditunjukkan pula bahwa sebuah persamaan diferensial biasa dapat memiliki dua interpretasi yang berbeda pada konteks pemodelan yang sama.
4.1 Model 1
Model ini menghubungkan antara arus yang mengalir keluar , dari suatu ruas jalan pada waktu , dan volume kendaraan
, pada suatu ruas jalan pada waktu . Misalkan,
: arus yang mengalir masuk ke link (inflow) pada waktu t (kendaraan per satuan waktu).
: arus yang mengalir keluar dari link (outflow) pada waktu t (kendaraan per satuan waktu).
: volume kendaraan yang ada pada suatu ruas jalan pada waktu t (kendaraan).
Dengan didefinisikan ,
yaitu arus lalu-lintas yang mengalir keluar pada waktu t adalah fungsi dari volume pada waktu t. Dengan prinsip konservasi kendaraan, perubahan volume kendaraan pada link adalah arus yang masuk dikurangi dengan arus yang keluar, yaitu:
. (4.1) Tinjau suatu ruas jalan (link) bervolume yang tersebar merata. Jika lalu-lintas bergerak tanpa hambatan dan kendaraan terakhir
meninggalkan ruas jalan tersebut setelah waktu maka rata-rata arus keluar dari ruas jalan tersebut adalah , sehingga
. (4.2) berdasarkan aturan rantai, maka
. (4.3) Substitusikan persamaan (4.3) ke persamaan (4.1) maka diperoleh
. (4.4)
Persamaan (4.2) dan (4.4) disebut sebagai model lalu-lintas taksesak (uncongested). 4.2 Model 2
Model ini menghubungkan antara waktu tempuh kendaraan , untuk melintasi suatu panjang jalan pada waktu , dan volume kendaraan , pada suatu ruas jalan lalu-lintaspada waktu .
Misalkan adalah waktu tempuh pada saat , yaitu waktu yang dibutuhkan kendaraan untuk melintasi ruas jalan dari pintu masuk sampai dengan pintu keluar pada saat . Jika banyaknya kendaraan pada ruas jalan meningkat maka waktu tempuh kendaraan juga meningkat. Jika waktu tempuh kendaraan pada waktu bergantung linear pada banyaknya kendaraan pada waktu maka diberikan
, (4.5) dengan adalah waktu tempuh kendaraan untuk melintasi ruas jalan ketika tidak ada kendaraan lain yang mengalir pada link tersebut dalam satuan waktu dan adalah suatu konstanta dalam satuan kendaraan per satuan waktu.
Didefinisikan volume kendaraan pada link pada waktu adalah
v . (4.6) Dengan prinsip konservasi lalu-lintas, banyaknya kendaraan yang mengalir masuk pada waktu adalah sama dengan banyaknya
kendaraan yang keluar pada waktu yaitu,
(4.7)
Dengan menurunkan persamaan (4.7) terhadap waktu maka diperoleh arus keluar pada waktu yaitu
1
. (4.8)
Jika persamaan (4.6) disubstitusikan ke persamaan (4.5), kemudian kedua ruas diturunkan terhadap maka diperoleh laju perubahan waktu tempuh pada waktu , yaitu
. (4.9) Dengan demikian, arus keluar link pada
waktu menjadi
. (4.10)
Persamaan (4.10) dikatakan sebagai model waktu tempuh linear.
Terdapat dua solusi analitik untuk model waktu tempuh linear antara lain:
a. Solusi arus keluar
Teorema 1: Misalkan didefinisikan fungsi arus masuk pada waktu dengan
0 , , 00, (4.11) maka solusi analitik arus keluar ke-
1,2,3, … . untuk 0 adalah
∑
∑ . (4.12)
Dengan menggunakan induksi matematika dari persamaan di atas, maka diperoleh
. (4.13)
Berdasarkan persamaan (4.11)
lim ,
, (4.14) dengan menunjukkan maksimum arus keluar stabil dari link yang diperbolehkan. Bukti: Lihat di Lampiran 1.
b. Solusi waktu tempuh
Pada bagian ini akan diuraikan perubahan waktu tempuh setiap saat. Dari persamaan (4.11) dan (4.8) dapat dilihat bahwa laju perubahan waktu tempuh merupakan fungsi linear bagian demi bagian dengan kemiringan setiap bagian diberikan oleh
, 0,1,2, .. (4.15) dengan diskontinuitas terjadi pada saat arus keluar berubah. Misalkan nilai-nilai waktu tempuh yang terjadi pada titik diskontinu tersebut dinotasikan dengan , , ,…. Nilai awal waktu tempuh adalah dan pada titik ini diskontinuitas pertama terjadi dengan arus keluar melompat dari 0 ke . Berdasarkan Teorema 1, diskontinuitas berikutnya terjadi pada waktu dengan waktu tempuh
(4.16) Diskontinuitas berikutnya terjadi pada waktu
, , dan
seterusnya, dengan waktu-waktu tempuh berturut-turut diberikan oleh:
1 ,
,
,
dan seterusnya (4.17)
Dengan demikian, pada waktu
∑ ,
waktu tempuh diberikan oleh 1
1 (4.18) dengan,
dan
∑ .
Dengan menggunakan persamaan (4.13) dan (4.18) diperoleh bentuk sederhana
, yaitu
Bentuk rekursif persamaan (4.19) dapat ditulis menjadi
1 1 1
… .1 ∏ . (4.20) Selanjutnya, dengan mensubstitusikan persamaan (4.12) ke persamaan (4.20) , maka diperoleh
∑ , (4.21) dengan adalah waktu tempuh pada waktu
. Dengan menjumlahkan deret pada persamaan (4.21) makadiperoleh
lim , (4.22) asalkan 1. (4.23) Persamaan di atas menunjukkan bahwa pada akhirnya waktu tempuh akan konvergen ke nilai yang diberikan pada persamaan (4.22). Dengan menggunakan software Mathematica 6.0, didapatkan tiga grafik dari model waktu tempuh linear sebagai ilustrasi keseluruhan perilaku solusi analitik yang telah dijelaskan. Dengan arus keluar (outflow) , waktu tempuh , dan perubahan waktu tempuh berubah terhadap waktu. Dengan arus masuk yang konstan, 10 kendaraan/ menit, 10 menit dan 20 kendaraan/menit.
Keterangan: = Arus keluar (outflow), = Arus masuk (inflow), Gambar 5 Grafik arus masuk dan arus keluar
pada waktu .
Dari Gambar 5 di atas dapat dilihat bahwa garis horizontal adalah arus masuk konstan
dan garis putus-putus adalah arus keluar dengan diskontinuitas terjadi pada saat arus keluar berubah. Secara asimtot outflow mendekati inflow yang konstan.
Keterangan: = Waktu tempuh ke = Waktu tempuh konstan Gambar 6 Grafik waktu tempuh pada waktu .
Grafik di atas menunjukkan perilaku kendaraan dengan waktu tempuh ke- yang secara asimtot mendekati waktu tempuh yang konstan.
Gambar 7 Grafik laju perubahan waktu tempuh pada waktu .
Grafik di atas menunjukkan laju perubahan waktu tempuh setiap saat dengan kemiringan bagian demi bagian diberikan oleh persamaan (4.15). Seiring bertambahnya waktu, laju perubahan waktu tempuh semakin mengecil.
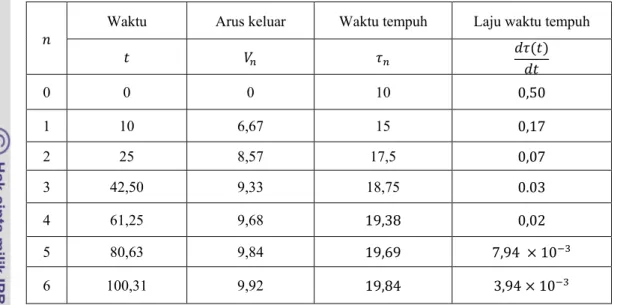
Untuk lebih jelas, koordinat setiap titik pada ketiga grafik di atas dapat di lihat pada Tabel 1. 0 20 40 60 80 100 t 0 2 4 6 8 10 12 p.v 0 20 40 60 80 100 t 10 12 14 16 18 20 t 0 20 40 60 80 100 t 0.0 0.1 0.2 0.3 0.4 0.5 0.6 dt dt
Tabel 1 Nilai-nilai waktu, arus keluar, waktu tempuh, dan laju waktu tempuh berdasarkan pada dua solusi analitik.
Waktu Arus keluar Waktu tempuh Laju waktu tempuh
0 0 0 10 0,50 1 10 6,67 15 0,17 2 25 8,57 17,5 0,07 3 42,50 9,33 18,75 0.03 4 61,25 9,68 19,38 0,02 5 80,63 9,84 19,69 7,94 10 6 100,31 9,92 19,84 3,94 10 4.3 Model 3
Seperti yang telah dijelaskan pada bab sebelumnya (model mikroskopik), formulasi model ini mengasumsikan bahwa pengemudi mobil pengikut menyesuaikan kecepatan menurut kecepatan relatif antara mobilnya dan mobil yang ada di depannya. Hal ini dideskripsikan oleh
, 4.24
dengan adalah posisi mobil pemimpin pada waktu , adalah posisi mobil pengikut pada waktu , dan adalah waktu reaksi atau waktu berfikir pengemudi mobil pengikut. Waktu reaksi adalah waktu yang dibutuhkan pengemudi mobil pengikut untuk bereaksi terhadap suatu perubahan pada perilaku pengemudi mobil pemimpin.
Konstanta adalah koefisien sensitivitas yang sangat berpengaruh terhadap besar kecilnya reaksi pengemudi mobil pengikut terhadap kecepatan relatif antarkendaraan. Semakin besar nilai maka semakin besar reaksi pengemudi mobil pengikut terhadap kecepatan relatif antarkendaraan.
Persamaan (4.24) dapat disederhanakan dengan menggunakan asumsi bahwa pengemudi mobil pengikut bereaksi dengan cepat, yaitu 0, sehingga diperoleh
. (4.25)
Dengan mendefinisikan dan . Persamaan (4.25) dapat ditulis dalam bentuk kecepatan kendaraan yaitu
. (4.26) Jika kecepatan mobil pemimpin pada saat diberikan maka persamaan diferensial (4.26) dapat diselesaikan untuk mendapatkan fungsi kecepatan mobil pengikut. Persamaan (4.26) dapat diperumumkan pula untuk kasus sejumlah barisan mobil, yang masing-masing mengikuti mobil di depannya secara langsung. Dengan menggunakan asumsi bahwa pengemudi ke- memiliki koefisien sensitifitas dan kecepatan mobil ke- yang dinotasikan dengan . Secara umum dapat dituliskan
. (4.27) Dengan menggunakan (4.27), jika diberikan maka kecepatan-kecepatan semua mobil dapat dievaluasi.
Simulasi Model 3
Pada bagian ini sebuah bentuk PDB orde 1 pada persamaan 4.27 akan disimulasikan dengan menggunakan program Mathematica 6.0. Dengan sebuah fungsi kecepatan kendaraan (mobil) pertama diberikan sehingga kecepatan-kecepatan semua mobil di belakangnya dapat dievaluasi dan sebuah fungsi posisi hasil pengintegralan kecepatan mobil pertama untuk mengevaluasi posisi mobil-mobil di belakangnya. Adapun tujuan dari simulasi ini adalah untuk mengetahui reaksi pengemudi mobil pengikut terhadap pengaruh koefisien sensitifitas .
Simulasi terdiri atas tiga contoh dengan masing-masing terdiri atas tiga kasus. Pada kasus pertama, akan ditunjukkan hasil
simulasi jika menggunakan nilai yang sama, pada kasus kedua, akan ditunjukkan hasil simulasi jika menggunakan nilai yang semakin membesar, dan pada kasus ketiga, akan ditunjukkan hasil simulasi jika menggunakan nilai semakin mengecil.
¾ Contoh 1
Misalkan sebuah kendaraan (mobil) pertama (terdepan) bergerak dengan fungsi kecepatan:
2 40,
jika diintegralkan sekali maka diperoleh fungsi posisi mobil pertama, yaitu:
40 .
Jika 0 100, maka 100, sehingga
40 +100,
dengan satuan km/jam untuk kecepatan dan km untuk posisi. Berdasarkan pernyataan pada model 3 (persamaan 4.27), maka hasil evaluasi dengan komputer dalam program
Mathematica 6.0 dengan 0
80 dan s 0 50 berturut-turut sebagai posisi mobil kedua (mobil pengikut pertama) dan posisi mobil ketiga (mobil pengikut kedua) pada saat 0 serta kecepatan semua kendaraan adalah 40 m/jam pada 0. Telah diperoleh hasil simulasi dalam grafik di bawah ini. (Fungsi posisi dan kecepatan mobil-mobil model car-following lihat di Lampiran 3).
# Kasus I : konstan
Pada kasus ini misalkan digunakan nilai 1 1,2,3 .
(a). (b). Ket: : perilaku mobil pertama.
: perilaku mobil kedua. : perilaku mobil ketiga.
Gambar 8 Kecepatan dan posisi mobil-mobil model car-following pada contoh 1 (kasus I). Gambar 8 adalah hasil simulasi untuk
konstan yang menunjukkan bahwa semua pengemudi mobil bereaksi sama terhadap mobil di depannya. Semua mobil bergerak beriringan mengikuti mobil di depannya
dengan jarak antarmobil dan peningkatan kecepatan yang stabil seiring berjalannya waktu. Dapat dilihat pada Gambar 8a semua kendaraan memiliki kecepatan yang sama pada 0. 2 4 6 8 10 t 100 200 300 400 500 s 2 4 6 8 10 t 10 20 30 40 50 60 70 u
2 4 6 8 10 t 10 20 30 40 50 60 70 u 2 4 6 8 10 t 10 20 30 40 50 60 70 u # Kasus II : Membesar
Pada kasus ini digunakan nilai yang semakin membesar sehingga .
Misalkan 1, 2, dan 5.
(a) (b) Ket: : perilaku mobil pertama.
: perilaku mobil kedua. : perilaku mobil ketiga.
Gambar 9 Kecepatan dan posisi mobil-mobil model car-following pada contoh 1 (kasus II). Dapat dilihat pada Gambar 9 di atas,
peningkatan besarnya koefisien sensitifitas untuk mobil ke- menyebabkan pengemudi mobil tersebut bereaksi lebih cepat untuk menaikkan kecepatan (perubahan posisi) dan percepatan (perubahan kecepatan) dengan bergerak mendekati mobil di depannya, yang berarti jarak antarmobil ke dan ke- 1 lebih dekat dibandingkan dengan kasus 1.
Gambar 9b menjelaskan mobil kedua bereaksi lebih cepat terhadap reaksi mobil pertama yang bergerak konstan (tidak ada perubahan reaksi), sehingga jarak semakin dekat. Dan mobil ketiga bereaksi lebih cepat terhadap mobil kedua dengan mendekati mobil kedua yang bereaksi dipercepat.
# Kasus III: Mengecil
Pada kasus ini digunakan nilai yang semakin mengecil sehingga . Misalkan 1 , 0.7 , dan 0.1.
(a) (b) Ket: : perilaku mobil pertama.
: perilaku mobil kedua. : perilaku mobil ketiga.
Gambar 10 Kecepatan dan posisi mobil-mobil model car-following pada contoh 1 (kasus III).
2 4 6 8 10 t 100 200 300 400 500 s 2 4 6 8 10 t 100 200 300 400 500 s
10 20 30 40 50 t 10 20 30 40 50 u
Gambar 10 adalah hasil simulasi jika koefisien sensitifitas, mobil ke- diperkecil, khususnya untuk mobil-mobil pengikut. Dapat dilihat pada gambar, mobil kedua dan ketiga bereaksi lebih lambat untuk menaikkan kecepatan dan percepatannya. Hal ini dapat dilihat dari jarak antargrafik yang menunjukkan jarak antarmobil yang lebih besar dibandingkan saat konstan.
¾ Contoh 2
Misalkan sebuah mobil pertama (terdepan) bergerak dengan fungsi kecepatan:
40,
jika diintegralkan sekali maka diperoleh fungsi posisi mobil pertama, yaitu:
40 ,
Jika 0 60, maka 60, sehingga
40 +60,
dengan satuan km/jam untuk kecepatan dan km untuk posisi. Berdasarkan pernyataan pada model 3 (persamaan 4.27), maka hasil evaluasi dengan komputer dalam program
Mathematica 6.0 dengan 0
30 dan s 0 5 berturut-turut sebagai posisi mobil kedua (mobil pengikut pertama) dan posisi mobil ketiga (mobil pengikut kedua) pada saat 0 serta kecepatan mobil kedua dan ketiga adalah nol pada
0 , 0 0 0 . Telah diperoleh
hasil simulasi dalam grafik berikut ini. (Fungsi posisi dan kecepatan mobil-mobil model car-following lihat di Lampiran 3).
# Kasus I: Konstan
Pada kasus ini misalkan digunakan nilai 1 1,2,3 .
(a) (b) Ket: : perilaku mobil pertama.
: perilaku mobil kedua : perilaku mobil ketiga.
Gambar 11 Kecepatan dan posisi mobil-mobil model car-following pada contoh 2 (kasus I). Untuk Gambar 11 di atas diasumsikan
mobil-mobil sedang bergerak di suatu ruas jalan yang sulit untuk mengendarai dengan kecepatan lebih tinggi sehingga kecepatan hanya berkisar antara 39-42 km/jam dengan menurunkan dan menaikkan kecepatan seiring berjalannya waktu untuk semua mobil.
Pada grafik posisi mobil-mobil, mobil kedua mengikuti mobil pertama dengan jarak antarmobil yang konstan sepanjang waktu yaitu 30 km. Dan mobil ketiga bergerak mengikuti mobil kedua dengan jarak antarmobil yang konstan sepanjang waktu yaitu 25 km. 2 4 6 8 10 t 100 200 300 400 500 s
10 20 30 40 50 t 10 20 30 40 50 u
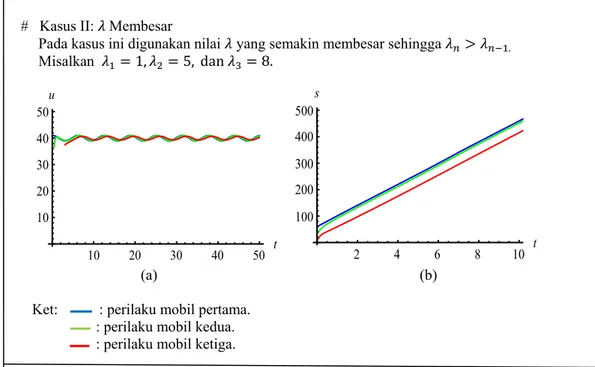
# Kasus II: Membesar
Pada kasus ini digunakan nilai yang semakin membesar sehingga .
Misalkan 1, 5, dan 8.
(a) (b) Ket: : perilaku mobil pertama.
: perilaku mobil kedua. : perilaku mobil ketiga.
Gambar 12 Kecepatan dan posisi mobil-mobil model car-following pada contoh 2 (kasus II). Gambar 12 menjelaskan saat koefisien
sensitifitas diperbesar, maka reaksi pengemudi mobil-mobil tersebut adalah lebih cepat untuk menaikkan kecepatan dan percepatannya. Hal ini dapat dilihat dari reaksi mobil kedua 5 terhadap mobil pertama
1 yang lebih cepat (jarak lebih dekat) dibandingkan dengan mobil ketiga 8 terhadap mobil kedua 5 .
# Kasus III: Mengecil
Pada kasus ini digunakan nilai yang semakin mengecil sehingga . Misalkan 1 , 0.4 , dan 0.3.
(a) (b) Ket: : perilaku mobil pertama.
: perilaku mobil kedua. : perilaku mobil ketiga.
Gambar 13 Kecepatan dan posisi mobil-mobil model car-following pada contoh 2 (kasus III). Gambar 13 menjelaskan saat koefisien
sensitifitas diperkecil 1 , maka pengemudi mobil-mobil tersebut bereaksi lebih lambat. Dapat dilihat dari jarak antargrafik yang menunjukkan jarak
antarmobil yang lebih jauh. Mobil kedua bereaksi jauh lebih lambat (jarak lebih jauh) terhadap mobil pertama dibandingkan dengan reaksi pengemudi mobil ketiga terhadap mobil kedua. 2 4 6 8 10 t 100 200 300 400 500 s 10 20 30 40 50 t 10 20 30 40 50 u 2 4 6 8 10 t 100 200 300 400 500 s
¾ Contoh 3
Misalkan sebuah mobil pertama (terdepan) bergerak dengan fungsi kecepatan:
2 √ ,
jika diintegralkan sekali maka diperoleh fungsi posisi mobil pertama, yaitu:
40√1 ,
Jika 0 70, maka 30 sehingga
40√1 30,
dengan satuan km/jam untuk kecepatan dan km untuk posisi. Berdasarkan pernyataan pada
model 3 (persamaan 4.27), maka hasil evaluasi dengan komputer dalam program
Mathematica 6.0 dengan 0
50 dan s 0 0 berturut-turut sebagai posisi mobil kedua (mobil pengikut pertama) dan posisi mobil ketiga (mobil pengikut kedua) pada saat 0. Kecepatan mobil-mobil pada 0 adalah 20 km/jam, 16 km/jam dan 20 km/jam. Telah diperoleh hasil simulasi dalam grafik berikut ini. (Fungsi posisi dan kecepatan mobil-mobil model car-following lihat di Lampiran 3).
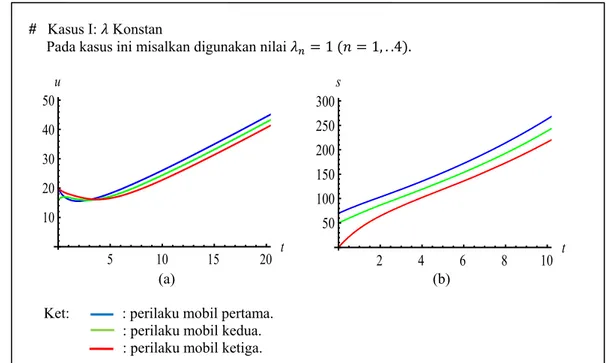
# Kasus I: Konstan
Pada kasus ini misalkan digunakan nilai 1 1, . .4 .
(a) (b) Ket: : perilaku mobil pertama.
: perilaku mobil kedua. : perilaku mobil ketiga.
Gambar 14 Kecepatan dan posisi mobil-mobil model car-following pada contoh 3 (kasus I). Gambar 14 menjelaskan mobil kedua
bergerak mengikuti mobil pertama pada jarak 20 meter sepanjang waktu dari mobil pertama. Dan mobil ketiga bergerak pada
jarak 50 meter dari mobil kedua pada 0 kemudian mendekati mobil kedua dan kemudian mejauh dari mobil di depannya. 5 10 15 20 t 10 20 30 40 50 u 2 4 6 8 10 t 50 100 150 200 250 300 s
5 10 15 20 t 10 20 30 40 50 u
# Kasus II: Membesar
Pada kasus ini digunakan nilai yang semakin membesar sehingga .
Misalkan 1, 2, dan 3.
(a) (b)
Ket: : perilaku mobil pertama. : perilaku mobil kedua. : perilaku mobil ketiga.
Gambar 15 Kecepatan dan posisi mobil-mobil model car-following pada contoh 3 (kasus II)
Gambar 15a menjelaskan kecepatan mobil-mobil model car-following menurun untuk beberapa, waktu kemudian meningkat. Oleh karena peningkatan besarnya koefisien sensitifitas , maka pengemudi mobil-mobil pengikut mempercepat reaksinya untuk meningkatkan kecepatan maupun percepatannya. Hal ini dapat dilihat dari
pergeseran garis berwarna hijau dan merah pada Gambar 15a dan 15b.
Gambar 15b menjelaskan mobil kedua dan ketiga mempercepat reaksinya dengan meningkatkan kecepatannya sehingga posisinya tampak dekat dengan mobil di depannya (mobil ke- 1 .
# Kasus III: Mengecil
Pada kasus ini digunakan nilai yang semakin mengecil sehingga .
Misalkan 1 , 0.6, dan 0.2.
(a) (b)
Ket: : perilaku mobil pertama. : perilaku mobil kedua. : perilaku mobil ketiga.
Gambar 16 Kecepatan dan posisi mobil-mobil model car-following pada contoh 3 (kasus III).
5 10 15 20 t 10 20 30 40 50 u 2 4 6 8 10 t 50 100 150 200 250 300 s 2 4 6 8 10 t 50 100 150 200 250 300 s
Gambar 16a menjelaskan kecepatan mobil-mobil model car-following menurun untuk beberapa waktu, kemudian meningkat. Oleh karena penurunan besarnya koefisien sensitifitas , maka pengemudi mobil-mobil pengikut memperlambat reaksinya untuk meningkatkan kecepatan maupun percepatannya. Hal ini tampak jelas terlihat dari pergeseran garis berwarna hijau dan merah pada Gambar 16a dan 16b.
Gambar 16b menjelaskan mobil kedua dan ketiga memperlambat reaksinya dengan menunjukkan jarak antarmobil yang lebih besar.
4.4 Interpretasi Model
Perhatikan kembali model makroskopik pada persamaaan (4.1). Jika dimisalkan bahwa arus keluar bergantung linear pada volume yaitu
, (4.28) berdasarkan aturan rantai, maka
, (4.29) Substitusikan persamaan (4.29) ke persamaan (4.1) maka diperoleh
, (4.30) dengan adalah waktu tempuh saat kondisi stabil di mana arus masuk dan arus keluar adalah konstan.
Persamaan (4.28) dan (4.30) disebut sebagai model arus taksesak (uncongested) karena model membiarkan arus keluar meningkat secara bebas dengan peningkatan volume. Dapat dilihat bahwa persamaan (4.30) dan (4.24) memiliki bentuk persamaan diferensial yang sama, yaitu,
. (4.31) Persamaan (4.31) adalah PDB linear orde-1 dengan penyelesaian
(4.32)
Ada dua interpretasi dari persamaan (4.31):
1. Jika didefinisikan sebagai arus lalu-lintas yang mengalir keluar meninggalkan link dalam satuan kendaraan/satuan waktu, sebagai arus lalu-lintas yang mengalir masuk link dalam satuan kendaraan/satuan waktu, dan sebagai kebalikan dari waktu tempuh stabil maka persamaan (4.31) merepresentasikan sebuah model makroskopik arus lalu-lintas.
2. Jika didefinisikan sebagai kecepatan kendaraan di belakang dalam satuan meter/detik, sebagai kecepatan kendaraan di depannya dalam meter/detik, dan sebagai kepekaan kendaraan pengikut terhadap perubahan gerak kendaraan di depannya maka persamaan (4.31) merepresentasikan sebuah model mikroskopik mobil pengikut.
Bentuk umum persamaan (4.32) adalah
, 1, … . , , (4.33)
Dengan penyelesaian
. (4.34)
Misalkan ruas jalan dibagi menjadi segmen berpanjang sama sehingga tiap segmen memiliki waktu tempuh . Karena arus keluar dari segmen ke- 1 merupakan arus masuk segmen ke- maka diperoleh persamaan-persamaan diferensial
(4.35) untuk 1, … . . , . Jika arus masuk
diberikan maka arus masuk ke setiap segmen, yaitu , ……, dapat dihitung. Pada akhirnya pun dapat diperoleh. hubungan antara (4.35) dan (4.33) menjadi jelas.
Dengan demikian persamaan (4.33) dapat diinterpolasikan sebagai model mikroskopik
mobil pengikut atau model makroskopik segmen.