POLITEKNO SAINS EDISI KHUSUS DIES NATALIS Juli 2012 PENALAAN PARAMETER KENDALI PID DENGAN
LOGIKA FUZZY PADA SISTEM TERMAL Wiyono
Staf Pengajar – Progdi Teknik Elektro, Akademi Teknologi Warga Surakarta
ABSTRACT
Thermal system is a slow process of changing. If the cooling process done naturally will lead to the decrease in temperature to be slow, so that attempted to control overshoot and steady-state error as small as possible to the conditions set point and load changes. In the conventional PID control tuning is done off-line without taking into account the changes in the plant and the disturbances that arise. The purpose of this study is to design equipment for the control of thermal systems that can automatically tune the PID parameters by fuzzy logic. In the present study used a RISC AVR microcontroller as a control center, which will provide value to the control unit controls the power, then the percentage of control values fed to the heating element with 450 Watt power to heat water with a maximum volume of 2 Liters. While the software is used for PID algorithms and fuzzy logic programming with C language.
In order to tune the proper PID parameters on-line, then made two-level control system. The first two-level determines the PID parameters by finding the minimum and maximum value of Kp, Ki and Kd with the reaction curve method. The second level in order to design a fuzzy system can automatically tune the PID gain, then formulated into a combination of 49 fuzzy if-then rules to get the value of Kp, Ki and Kd the right of errors and changes in the value of delta error.
The results of the process control system with PID control parameters tuning with fuzzy logic is applied to the thermal system can improve the performance of conventional PID control. Tests for set point changes and changes in water volume resulting average value of the response characteristics of control systems as follows: rise time (tr) 231 seconds, the peak time (tp) 254 seconds, the time setting (ts) 302 seconds,
the overshoot (Mp) 0.22 ℃ and steady state error (OS) 0.28 ℃. While the
conventional PID control of the resulting tr = 223 seconds, tp = 307
seconds, ts = 678 seconds, Mp = 2.17 ℃ and OS = 0.67 ℃.
POLITEKNO SAINS EDISI KHUSUS DIES NATALIS Juli 2012 I PENDAHULUAN
Kendali PID telah banyak digunakan di proses industri karena bentuknya sederhana dan mudah diimplementasikan. Keberhasilan pengendalian dengan kendali PID ditentukan oleh penalaan parameter PID. Pada kendali PID konvensional penalaan dilakukan secara off-line
tanpa memperhitungkan perubahan yang terjadi pada plant dan gangguan yang muncul. Berdasarkan kondisi ini, maka dalam penelitian ini dicoba untuk mengoptimisasi parameter PID secara on-line dengan memperhitungkan perubahan yang terjadi pada plant dan gangguan yang muncul dengan menggunakan pengendali berbasis logika fuzzy
Di dunia industri, khususnya yang menggunakan sistem termal, diperlukan pengendalian yang teliti, stabil terhadap gangguan dan mampu mengadaptasi perubahan setpoint
maupun perubahan beban. Jika proses pengendalian menghasilkan keluaran melebihi harga setpoint
tetapi tidak dilakukan proses pendinginan oleh peralatan kendali artinya proses pendinginan dilakukan secara alami, maka dibutuhkan waktu yang lebih lama untuk melakukan proses pendinginan menuju nilai setpoint. Dengan demikian perlu dirancang suatu sistem kendali yang mampu
menghasilkan keluaran dengan overshoot dan steadystate error
sekecil mungkin.
II METODE PENELITIAN 2.1 Bahan Penelitian
Bahan yang akan diteliti adalah proses pemanas zat cair berupa air. Air ditampung di bak penampung dengan kapasitas volume 2 Liter tanpa ditutup. Komponen pemanas berupa heater coil dengan kapasitas daya 150 Watt sebanyak 3 Unit. Tidak dilakukan proses pendinginan oleh peralatan, proses pendinginan terjadi secara alami. Suhu air diharapkan dapat diatur sesuai dengan suhu yang diinginkan.
2.2 Alat Penelitian
Penalaan parameter PID dengan logika fuzzy yang dimaksud adalah ketiga parameter Kp, Kd dan Ki pada kendali PID ditala dengan menggunakan logika fuzzy. Pada kendali PID konvensional, penalaan dilakukan secara off-line
POLITEKNO SAINS EDISI KHUSUS DIES NATALIS Juli 2012
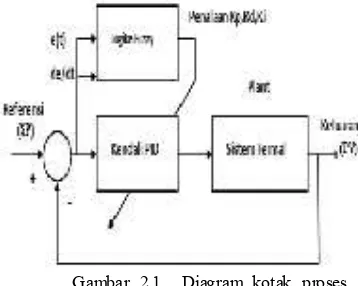
Gambar 2.1 Diagram kotak proses pengendalian sistem termal
e(t) adalah selisih dari referensi dan keluaran, sedangkan de/dt adalah perubahan dari e(t). e(t) = Referensi(Sp) – Keluaran (Pv)
(2.1)
Hasil akhir dari proses pengendalian yaitu untuk mendapatkan nilai keluaran yang sesuai dengan nilai referensinya. Hasil proses pengendalian dapat dianalisis berdasarkan karakteristik tanggapan sistem pengendalian yang berhubungan dengan kestabilan, respon transient
(karakteristik sistem) dan error steady state.
2.3 Jalan Penelitian
2.3.1 Perancangan Perangkat Keras
Secara diagram kotak hubungan antara komponen-komponen sistem kendali dapat
dilihat seperti pada Gambar 2.2 berikut ini.
Gambar 2.2 Diagram kotak perangkat keras kendali
2.3.2 Perancangan Perangkat Lunak Fuzzy dan PID
Gambar 2.3 Diagram kotak penalaan parameter PID dengan Fuzzy
POLITEKNO SAINS EDISI KHUSUS DIES NATALIS Juli 2012 pemrograman logika fuzzy dan
kendali PID. Seluruh program yang digunakan dalam penelitian menggunakan bahasa C dengan bantuan tool software CodeVision AVR 1.25.3 (CV AVR) [6]. CV AVR merupakan salah satu software kompiler yang kusus digunakan untuk Mikrokontroler keluarga AVR.
2.3.3 Perangkat lunak PID
Persamaan kendali PID dalam bentuk transformasi Laplace dapat dituliskan [21]:
(2.2)
dengan metode penyelesaian yang sering digunakan yaitu backward
difference method dapat dijelaskan
sebagai berikut:
z0 = nomor sampling ke n (sekarang berlangsung)
z-1 = waktu sampling ke n-1
z-2 = waktu sampling ke n-2, dan seterusnya
Dengan metode Backward
difference persamaan PID menjadi:
(2.3)
Satu interval waktu sampling dapat dinyatakan:
(2.4)
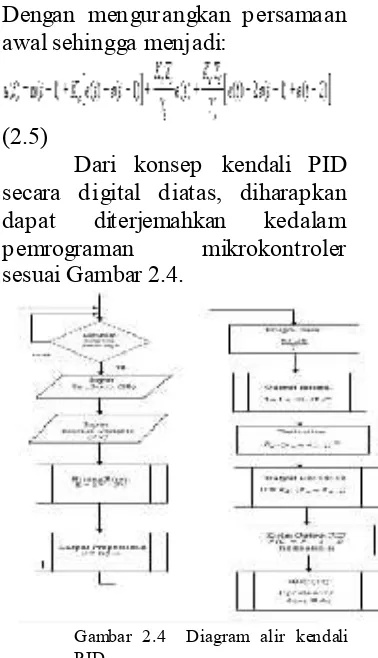
Dengan mengurangkan persamaan awal sehingga menjadi:
(2.5)
Dari konsep kendali PID secara digital diatas, diharapkan dapat diterjemahkan kedalam pemrograman mikrokontroler sesuai Gambar 2.4.
Gambar 2.4 Diagram alir kendali PID
2.3.4 Perangkat lunak Logika Fuzzy
2.3.4.1 Fungsi Keanggotaan error dan Perubahan error
Nilai error e dibagi kedalam tujuh level ( NB, NM , NS, ZZ, PS, PM, PB), sedangkan nilai perubahan error ec (error change) juga dibagi kedalam tujuh level (DNB, DNM, DNS, DZZ, DPS, DPM, DPB). Huruf pertama N, P dan D berarti negative, positive dan
POLITEKNO SAINS EDISI KHUSUS DIES NATALIS Juli 2012 S dan Z berarti big, medium, small
dan zero.
Gambar 2.5 Keanggotaan input error e dan perubahan error ec
Sedangkan untuk fungsi keanggotaan input error e dan perubahan error ec seperti pada Gambar 2.5.
Selanjutnya dilakukan penurunan berdasarkan respon step
sistem, seperti Gambar 2.6, dibawah ini
Gambar 2.6 Respon step sistem
Pada titik awal disekitar a, suatu sinyal aksi kendali yang besar dibutuhkan untuk mencapai waktu naik yang cepat. Untuk menghasilkan sinyal aksi kendali
yang besar diperlukan penguatan proporsional yang besar, penguatan derivatif yang kecil dan penguatan integral yang besar. Dari persamaan sebelumnya dapat ditentukan apabila nilai Kp dan Kd diperoleh maka penguatan integral berlawanan secara proporsional terhadap , artinya penguatan integral yang kecil bermakna kecil. Akibatnya aturan disekitar al adalah:
If e(t) is PB and ė(t) is ZZ Then Klp
is Big, Kld is Small, is S
If e(t) is ZZ and ė(t) is NB Then Klp
is Small, Kld is Big, is B
Tabel 2.1 Aturan Kendali
Kaidah
Perpendek rise time Perpendek rise time Perpendek rise time Kurangi ov ershoot Kurangi ov ershoot Kurangi ov ershoot Kurangi ov ershoot Kurangi ov ershoot Kurangi ov ershoot Perkecil osilasi Perkecil osilasi Perkecil osilasi Peng ereman Perpendek rise time Kurangi ov ershoot Kurangi ov ershoot Perkecil osilasi Peng ereman Peng ereman
POLITEKNO SAINS EDISI KHUSUS DIES NATALIS Juli 2012
fuzzifier dan center average
defuzzifier, parameter K' p , K' d
dan dapat ditala secara on-line
sesuai persamaan berikut ini [16].
2.3.4.2 Mencari Nilai Kp , Kd dan ∝
penguatan PID yang akan ditala dinyatakan dengan [Kp min, Kp
max] c R dan
[Kd min, Kd max] c R dengan penguatan proporsional Kp ∈ [Kp
min, Kp max] dan penguatan derivatif Kd ∈ [Kd min, Kd max]. Untuk memudahkan Kp dan Kd
dinormalisasikan menjadi 0-1 dengan tranformasi linier seperti berikut.
K 'p = Kp – Kpmin / Kpmax –
Kpmin (2.9)
K 'd = Kd – Kdmin / Kdmax –
Kdmin (2.10) Konstanta waktu
integral dapat ditentukan dengan mengacu kepada konstanta waktu derivatif. Dinyatakan dengan
Ti = α Td
(2.11)
Selanjutnya dapat diperoleh,
Ki = Kp / ( αTd) = KP2 / ( αKd) (2.12)
Table 2.2 rule untuk K’p
Table 2.3 rule untuk K’d
∆error
DNB DNM DNS DZZ DPS DPM DPB error
NB S S S S S S S
NM B B S S S B B
NS B B B S B B B
ZZ B B S S S B B
PS B B B S B B B
PM B B S S S B B
PB S S S S S S S
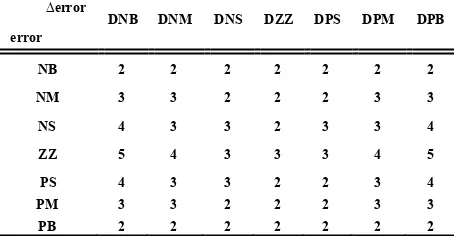
Table 2.4 rule untuk a
∆error
DNB DNM DNS DZZ DPS DPM DPB error
NB 2 2 2 2 2 2 2
NM 3 3 2 2 2 3 3
NS 4 3 3 2 3 3 4
ZZ 5 4 3 3 3 4 5
PS 4 3 3 2 2 3 4
PM 3 3 2 2 2 3 3
PB 2 2 2 2 2 2 2
Ketiga Tabel 2.2, 2.3, 2.4 diatas adalah hasil konsekuen untuk pembacaan nilai Kp’, Kd’ dan α.
∆error
DNB DNM DNS DZZ DPS DPM DPB error
NB B B B B B B B
NM S B B B B B S
NS S S B B B S S
ZZ S S S B S S S
PS S S B B B S S
PM S B B B B B S
POLITEKNO SAINS EDISI KHUSUS DIES NATALIS Juli 2012
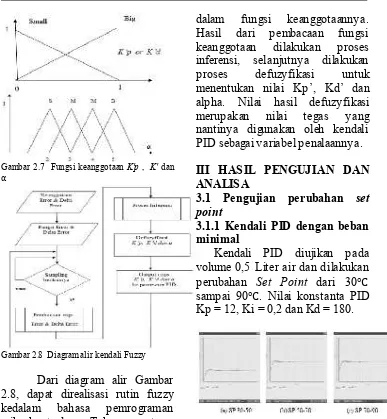
Gambar 2.7 Fungsi keanggotaan K'p , K' dan α
Gambar 2.8 Diagram alir kendali Fuzzy
Dari diagram alir Gambar 2.8, dapat direalisasi rutin fuzzy kedalam bahasa pemrograman mikrokontroler. Tahap pertama adalah membentuk definisi keanggotaan error dan Delta error
kedalam struktur array, kemudian membentuk fungsi keanggotaan tiap variabel keanggotaan error dan Delta error. Pada saat terjadi eksekusi program di setiap waktu sampling maka besar nilai crips
error dan Delta error dimasukkan
dalam fungsi keanggotaannya. Hasil dari pembacaan fungsi keanggotaan dilakukan proses inferensi, selanjutnya dilakukan proses defuzyfikasi untuk menentukan nilai Kp’, Kd’ dan alpha. Nilai hasil defuzyfikasi merupakan nilai tegas yang nantinya digunakan oleh kendali PID sebagai variabel penalaannya.
III HASIL PENGUJIAN DAN ANALISA
3.1 Pengujian perubahan set point
3.1.1 Kendali PID dengan beban minimal
Kendali PID diujikan pada volume 0,5 Liter air dan dilakukan perubahan Set Point dari 30℃ sampai 90℃. Nilai konstanta PID Kp = 12, Ki = 0,2 dan Kd = 180.
Gambar 3.1 Kurva (a), (b), (c) SP 30-90℃ Kendali PID Volume minimal
POLITEKNO SAINS EDISI KHUSUS DIES NATALIS Juli 2012 90 detik, waktu puncak (tp) 131
detik, waktu penetapan (ts) 372 detik, terjadi overshoot dengan penyimpangan terhadap set point
2,5℃ dan kesalahan keadaan mantap 0,6 ℃.
3.1.2 Kendali PID dengan beban maksimal
Kendali PID diujikan pada volume 2 Liter air dan dilakukan perubahan Set Point dari 33℃ sampai 90℃. Nilai konstanta PID Kp = 21, Ki = 0,175 dan Kd = 630.
Gambar 3.2 Kurva (a), (b), (c) SP 33-90℃ Kendali PID Volume maksimal
Sedangkan hasil ketiga percobaan kendali PID pada Gambar 3.2 Kurva (a), (b), (c) dengan volume 2 Liter air dan perubahan suhu dari 30℃ sampai 90℃ dihasilkan nilai rata-rata waktu kenaikan (tr) 270 detik, waktu puncak (tp) 396 detik, waktu penetapan (ts) yang sangat lama, terjadi overshoot dengan penyimpangan terhadap set point
2℃ dan kesalahan keadaan mantap 1,16℃.
3.1.3 Kendali Fuzzy+PID dengan beban minimal.
Kendali Fuzzy+PID diujikan pada volume 0,5 Liter air dan dilakukan perubahan Set Point dari 30℃ sampai 90℃. Nilai parameter Kpmin-maks = (12,21), Kdmin-maks = (180,630) dan Ki = 12/α.30.
Gambar 3.3 Kurva SP 30-90℃ Kendali
fuzzy+PID untuk Volume minimal
Dari ketiga percobaan kendali Fuzzy+PID pada Gambar 3.3 Kurva (a), (b), (c) dengan volume air 0,5 Liter dan perubahan suhu dari 30℃ sampai 90℃ dihasilkan nilai rata-rata waktu kenaikan (tr) 231 detik, waktu puncak (tp) 265 detik, waktu penetapan (ts) 339 detik, terjadi
overshoot dengan penyimpangan
terhadap set point 0,2℃ dan kesalahan keadaan mantap 0,46℃.
3.1.4 Kendali Fuzzy+PID dengan dengan beban maksimal.
Kdmin-POLITEKNO SAINS EDISI KHUSUS DIES NATALIS Juli 2012 maks = (180,630) dan Ki =
12/α.30.
Gambar 3.4 Kurva SP 31-90 Kendali Fuzzy+PID danVolume maksimal
Ketiga percobaan kendali
Fuzzy+PID pada Gambar 3.4 Kurva
(a), (b), (c) dengan volume air 2 Liter dan perubahan suhu dari 30℃ sampai 90℃ dihasilkan nilai rata-rata waktu kenaikan (tr) 278 detik, waktu puncak (tp) 301 detik, waktu penetapan (ts) 315 detik, terjadi
overshoot dengan penyimpangan
terhadap set point 0,1℃ dan kesalahan keadaan mantap 0,26℃.
4.1.2 Kendali PID dengan Perubahan Beban dan set point Tetap
Kendali PID diujikan pada volume mulai 0,5 Liter air sampai 2 Liter air dan set point tetap sebesar 70℃. Nilai konstanta PID Kp = 12, Ki = 0,2 dan Kd = 180.
Gambar 3.5 Kurva perubahan Volume 0,5-2 Liter kendali PID
Dari ketiga percobaan kendali PID pada Gambar 3.5 Kurva (a), (b), (c) dengan set point
70℃ dan perubahan volume 0,5 Liter sampai 2 Liter air dihasilkan nilai rata-rata waktu kenaikan (tr) 267 detik, waktu puncak (tp) 351 detik, waktu penetapan (ts) 630 detik, terjadi overshoot dengan penyimpangan terhadap set point
2,1℃ dan kesalahan keadaan mantap 0,46℃.
4.1.2.2 Kendali Fuzzy+PID dengan Perubahan Beban dan set point Tetap
Kendali Fuzzy+PID diujikan pada volume mulai 0,5 Liter air sampai 2 Liter air dan set point
tetap sebesar 70℃. Nilai parameter Kpmin-maks = (12,21), Kdmin-maks = (180,630) dan Ki = 12/α.30.
Gambar 3.6 Kurva perubahan Volume 0,5-2 Liter pada kendali Fuzzy+PID
Ketiga percobaan kendali
Fuzzy+PID pada Gambar 3.6 Kurva
POLITEKNO SAINS EDISI KHUSUS DIES NATALIS Juli 2012 rata-rata waktu kenaikan (tr) 208
detik, waktu puncak (tp) 226 detik, waktu penetapan (ts) 278 detik, terjadi overshoot dengan penyimpangan terhadap set point
0,3℃ dan kesalahan keadaan mantap 0,2℃.
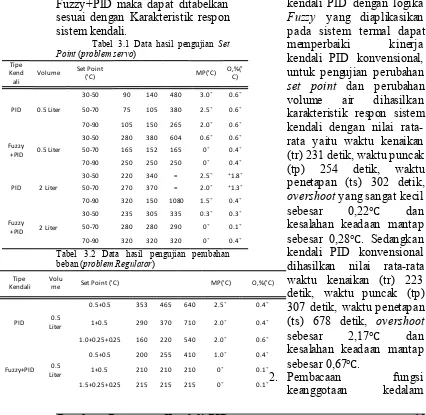
Dari pengamatan hasil pengujian kendali PID dan Fuzzy+PID maka dapat ditabelkan sesuai dengan Karakteristik respon sistem kendali. beban (problem Regulator)
Tipe
IV KESIMPULAN DAN SARAN 4.1 Kesimpulan
Dari hasil penelitian dan pembahasan, dapat disimpulkan beberapa hal sebagai berikut:
1. Proses kendali dengan sistem penalaan parameter kendali PID dengan logika
Fuzzy yang diaplikasikan
pada sistem termal dapat memperbaiki kinerja kendali PID konvensional, untuk pengujian perubahan
set point dan perubahan
volume air dihasilkan karakteristik respon sistem kendali dengan nilai rata-rata yaitu waktu kenaikan (tr) 231 detik, waktu puncak (tp) 254 detik, waktu penetapan (ts) 302 detik,
overshoot yang sangat kecil
sebesar 0,22℃ dan kesalahan keadaan mantap sebesar 0,28℃. Sedangkan kendali PID konvensional dihasilkan nilai rata-rata waktu kenaikan (tr) 223 detik, waktu puncak (tp) 307 detik, waktu penetapan (ts) 678 detik, overshoot
sebesar 2,17℃ dan kesalahan keadaan mantap sebesar 0,67℃.
POLITEKNO SAINS EDISI KHUSUS DIES NATALIS Juli 2012 struktur array pada
pemrograman logika fuzzy
dan PID yang ditulis dengan bahasa C, dapat menghemat lokasi memori program mikrokontroler AVR ATmega32. Pada penelitian ini untuk mengakses dua masukan sistem fuzzy e(t)
dan (t) kedalamkombinasi 49 aturan parameter K'p ,
K'd dan agar dapat ditala secara on-line, dibutuhkan lokasi memori program 26 Kbyte, sedangkan dengan pendefinisian langsung setiap fungsi dibutuhkan 31Kbyte.
4.2 Saran
Beberapa saran untuk alur pengembangan penelitian lebih lanjut dapat penulis berikan, yaitu: 1. Pengembangan dapat dilakukan
dengan mengatur kembali bentuk dan rentang keanggotaan Kp, Kd dan α pada logika fuzzy
untuk menghasilkan karakteristik respon sistem kendali yang berbeda.
2. Pengembangan dapat diaplikasikan pada skala plant
yang lebih besar.
Penulis berharap penelitian ini dapat dikembangkan lebih lanjut, dan dapat memberikan sumbangan nyata bagi perkembangan teknologi perangkat sistem kendali dan
perkembangan perangkat
embedded system yang
bermanfaat dibidang industri.
DAFTAR PUSTAKA
[1] Atmel, 2003, 8-bit Microcontroller with 32K Bytes In-System Programmable Flash,
http://www.atmel.com/ product/AVR/ . (download, 20/3/2008, jam 8:04).
[2] Agus,B. 2008, C dan AVR: Rahasia Kemudahan
Bahasa C dalam
Mikrokontroler
ATmega8535,
Yogyakarta, Graha Ilmu.
[3] Ahn, K.K & Nguyen, B.K. 2006, Position Control of Shape Memory Alloy
ActuatorsUsing Self
Tuning Fuzzy PID Controller,
International Journal of Control, Automation, and Systems, vol. 4, no. 6, pp. 756-762. (download, 12/12/2008, jam 15:23).
[4] Gopal, M. 2003, Control
Systems, USA.
McGraw-Hill.
[5] Gunterus, Frans. 1994,
Falsafah Dasar: Sistem
POLITEKNO SAINS EDISI KHUSUS DIES NATALIS Juli 2012 jakarta. PT. Elex Media
Komputindo. and Inelligent Systems
Design, England:
Pearson.
[9] Kaufmann, A. and M.M. Gupta, 1991,
Introduction to Fuzzy Arithmetic Theory and
Applications , New
York, Van Nostrand Reinhold.
[10] Klir, G.J. & T.A. Folger,
1988, Fuzzy
Sets,Uncertainty, and
Information , New
Delhi, Prentice-Hall. [11] Kim, J.H. Kim, K.C. dkk,
1994,
FuzzyPrecompensated
PID Controllers, IEEE.
Trans. Syst. Man. Cybern., Vol.2. No.4, (download, 22/1/2008, jam 11:16).
[12] National Semiconductor, 2000, LM35Precision Centigrade
Temperature Sensors,
www.national.com.
.(download, 9/5/2009, jam 13:08).
[13] Ogata, K., 1997, Modern
Control Engineering,
New Jersey, Prentice
Controller with
Adaptable Reference,
International Journal of Intelligent Systems and Technologies 3;1 © www.waset.org.
(download 17/12/209, jam 9:23).
[16] Wang, L.X. 1997, A Course in Fuzzy Systems and
Control, New
POLITEKNO SAINS EDISI KHUSUS DIES NATALIS Juli 2012
Hydraulic Actuator
Using System
Identification
Approach, Universiti
Teknologi
Malaysia,International Journal on Smart Sensing and Intelligent Systems, Vol.2. (download, 20/12/2010, jam 11:12).
[19] Zhen-Yu Zhao, M. Tomizuka, & S. Isaka 1993, Fuzzy Gain Scheduling of PID
Controllers,IEEE.
Trans. Syst. Man. Cybern., Vol.23. No.5: 1392–1398, (download, 6/8/2009, jam 10:34). [20] Zimmerman, H.J., 1991,
Fuzzy Set Theory and
Its Applications,
Amsterdam,Kluwer Publishing Co.
[21] Visioli A.,2006, Practical
PID Control, London,
Springer.
[22] Kularatna, N. 1998, Power
Electronics Design
Handbook,
Woburn,Newnes. [23] Cheng-Ching Yu, 2006,
Autotuning of PID Controllers, A Relay
Feedback Approach,
Springer 2nd.
[24] National Instruments, 1998,
Getting started using ComponentWorks
Autotuning PID,
http://www.natinst.com , (download, 15/1/2009) [25] Li- Xuquan., Chen, j., dkk, 2004, A new method for controlling refrigerant flow in automobile air
conditioning, Applied
Thermal Engineering 24 1073–1085, http://www.sciencedire ct.com
[26] http://www.omega.com [27] Lian, H., Christopher H,
dkk, 1999, Fuzzy Hybrid PID Controller of a Steam Heated
Dryer, Korea, IEEE.