BAB II
KAJIAN PUSTAKA
2.1 Tinjauan Mutakhir
Untuk melengkapi skripsi ini digunakan beberapa jurnal dan penelitian yang berhubungan erat dengan judul skripsi ini yaitu Sistem Perhitungan Orang Berbasis Sensor Visual Dalam Lingkup Jaringan Sensor Nirkabel sebagai referensi, adapun referensi penelitian dan jurnal yang telah ada sebelumnya adalah sebagai berikut :
1. Referensi yang pertama merupakan sebuah penelitian berjudul “Jaringan Sensor Visual Nirkabel” oleh Nyoman Putra Sastra, 2015.
Penelitian ini bertujuan membuat suatu sistem jaringan sensor visual nirkabel yang handal dengan mengembangkan platform jaringan sensor nirkabel yang telah ada sehingga implementasi JSN lebih mudah dan praktis apabila digunakan untuk aplikasi-aplikasi visual. Penelitian ini menghasilkan konsumsi energi yang dihasilkan pada IEEE 802.15.4 lebih rendah dibandingkan dengan IEEE 802.11 b/g, yaitu pada jarak 10 meter konsumsi energi IEEE 802.15.4 hanya 11,18% dari konsumsi energi IEEE 802.11 b/g.
2. Referensi yang kedua berjudul “Lightweight People Counting and Localizing for Easily Deployable Indoors WSNs” oleh Thiago Teixeira dan Andreas Savvides, 2008.
Dimana dalam penelitian ini bertujuan menciptakan metode penghitungan dan pendeteksi orang dengan menggunakan kamera pada lingkup jaringan sensor nirkabel. Algoritma yang digunakan adalah motion histogram untuk mendeteksi orang berdasarkan gerakan dan besar pikselnya. Pada penelitian dihasilkan algoritma pendeteksi, penghitung dan penempatan orang dengan metode motion histogram yang beroperasi secara real time pada lingkup jaringan sensor nirkabel, Melalui penggunaan daya rendah pada AER motion camera, kompleksitas komputasi keseluruhan dapat lebih dikurangi, yang pada akhirnya memungkinkan prosesor sederhana
untuk dipekerjakan dan menurunkan konsumsi daya sistem tanpa perlu dilakukannya kalibrasi.
3. Refrensi yang ketiga berjudul “People Counting System Using Raspberry Pi With OpenCV” oleh Badhan Hemangi dan K. Nikhita, 2016.
Dimana dalam penelitian ini bertujuan menciptakan sistem penghitung orang yang berbasis Raspberry Pi dan library OpenCV. Dengan menggunakan picamera sebagai sensor visual untuk menangkap citra dan Raspberry Pi untuk memproses data visual. Sedangkan perangkat lunak menggunakan bahasa python dan library OpenCV. Pengujian dilakukan pada citra dengan wajah orang menghadap kamera, dengan mencari nilai histogram pada citra tersebut, jumlah orang dapat terhitung.
4. Referensi keempat berjudul “Rancang Bangun Alat Penghitung Jumlah Pengunjung di Toko Adhelia Berbasis Mikrokontroler Atmega 16” oleh Dhanar Intan Surya Saputra, 2015.
Dalam penelitian ini diwujudkan alat penghitung orang yang berbasis mikrokontroler Atmega 16, sensor ultrasonic yang berfungsi untuk menampilkan jarak digunakan sebagai sumber data dalam penelitian ini. Dengan membandingkan nilai jarak saat terdapat orang lewat dan saat tidak ada orang, didapat jumlah orang yang masuk ke dalam ruangan, hasil perhitungan orang ditampilkan pada LCD.
5. Referensi kelima berjudul “Aplikasi Sensor Vision untuk Deteksi Multiface dan Menghitung Jumlah Orang” oleh RD. Kusumanto, Wahyu S. Pambudi dan, Alan N. Tompunu,2012.
Penelitian ini bertujuan untuk menghitung jumlah orang pada citra statis maupun dinamis, dengan metode Haar-like Features yang mampu. melakukan pengenalan wajah secara real-time. Pengujian dilakukan pada citra statis yang didapatkan dengan mengunggah file image dan citra dinamis yang didapat dari kamera webcam. Dengan mendeteksi wajah orang pada citra, didapatkan jumlah orang pada citra tersebut.
Berdasarkan beberapa penelitian di atas, bisa diidentifikasi dua komponen penting dalam pengolahan citra pada JSN, yaitu aspek pada pengiriman data dan pada pengolahan citra. Kedua hal tersebut mempunyai peranan penting dalam mewujudkan skripsi ini.
Tabel 2.1 Tinjauan Mutakhir
No. Nama Penulis
Judul Metode Hasil
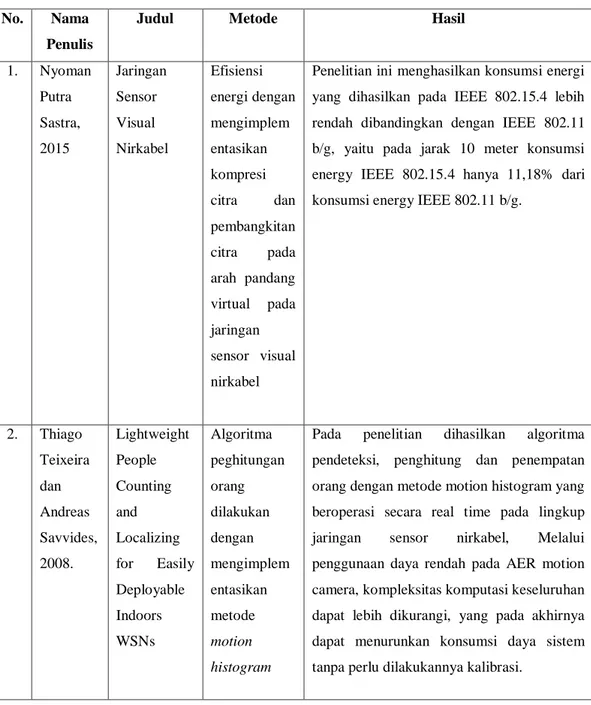
1. Nyoman Putra Sastra, 2015 Jaringan Sensor Visual Nirkabel Efisiensi energi dengan mengimplem entasikan kompresi citra dan pembangkitan citra pada arah pandang virtual pada jaringan sensor visual nirkabel
Penelitian ini menghasilkan konsumsi energi yang dihasilkan pada IEEE 802.15.4 lebih rendah dibandingkan dengan IEEE 802.11 b/g, yaitu pada jarak 10 meter konsumsi energy IEEE 802.15.4 hanya 11,18% dari konsumsi energy IEEE 802.11 b/g.
2. Thiago Teixeira dan Andreas Savvides, 2008. Lightweight People Counting and Localizing for Easily Deployable Indoors WSNs Algoritma peghitungan orang dilakukan dengan mengimplem entasikan metode motion histogram
Pada penelitian dihasilkan algoritma pendeteksi, penghitung dan penempatan orang dengan metode motion histogram yang beroperasi secara real time pada lingkup jaringan sensor nirkabel, Melalui penggunaan daya rendah pada AER motion camera, kompleksitas komputasi keseluruhan dapat lebih dikurangi, yang pada akhirnya dapat menurunkan konsumsi daya sistem tanpa perlu dilakukannya kalibrasi.
Tabel Lanjutan 2.1 Tinjauan Mutakhir
No. Nama Penulis
Judul Metode Hasil
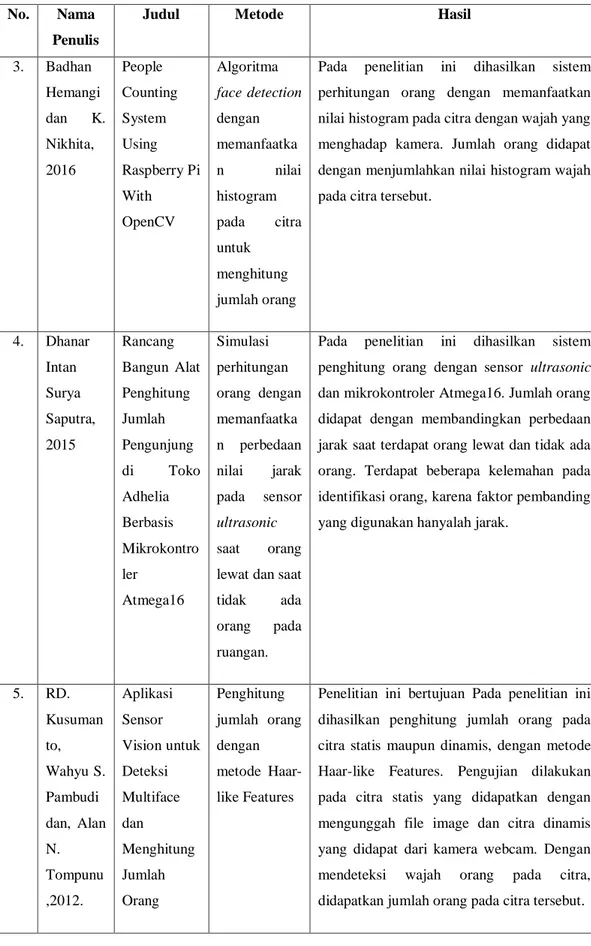
3. Badhan Hemangi dan K. Nikhita, 2016 People Counting System Using Raspberry Pi With OpenCV Algoritma face detection dengan memanfaatka n nilai histogram pada citra untuk menghitung jumlah orang
Pada penelitian ini dihasilkan sistem perhitungan orang dengan memanfaatkan nilai histogram pada citra dengan wajah yang menghadap kamera. Jumlah orang didapat dengan menjumlahkan nilai histogram wajah pada citra tersebut.
4. Dhanar Intan Surya Saputra, 2015 Rancang Bangun Alat Penghitung Jumlah Pengunjung di Toko Adhelia Berbasis Mikrokontro ler Atmega16 Simulasi perhitungan orang dengan memanfaatka n perbedaan nilai jarak pada sensor ultrasonic saat orang lewat dan saat tidak ada orang pada ruangan.
Pada penelitian ini dihasilkan sistem penghitung orang dengan sensor ultrasonic dan mikrokontroler Atmega16. Jumlah orang didapat dengan membandingkan perbedaan jarak saat terdapat orang lewat dan tidak ada orang. Terdapat beberapa kelemahan pada identifikasi orang, karena faktor pembanding yang digunakan hanyalah jarak.
5. RD. Kusuman to, Wahyu S. Pambudi dan, Alan N. Tompunu ,2012. Aplikasi Sensor Vision untuk Deteksi Multiface dan Menghitung Jumlah Orang Penghitung jumlah orang dengan metode Haar-like Features
Penelitian ini bertujuan Pada penelitian ini dihasilkan penghitung jumlah orang pada citra statis maupun dinamis, dengan metode Haar-like Features. Pengujian dilakukan pada citra statis yang didapatkan dengan mengunggah file image dan citra dinamis yang didapat dari kamera webcam. Dengan mendeteksi wajah orang pada citra, didapatkan jumlah orang pada citra tersebut.
2.2 Sensing dan Sensor
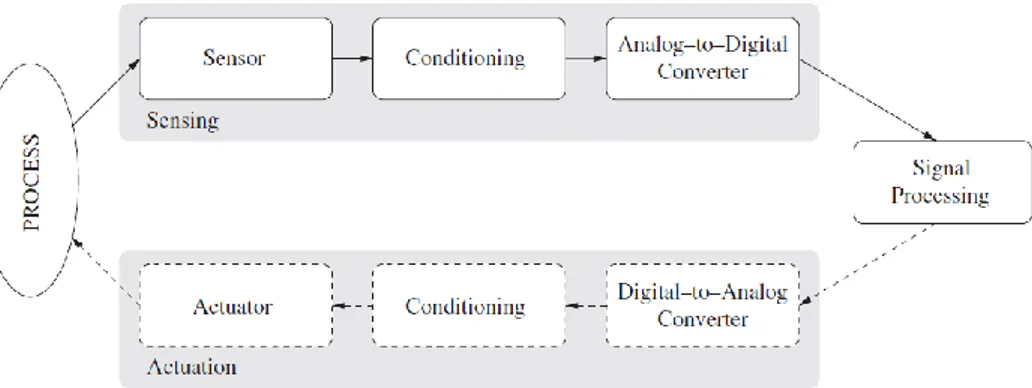
Sensing adalah teknik yang digunakan untuk mengumpulkan informasi tentang objek fisik atau proses, termasuk terjadinya peristiwa (yaitu, perubahan dalam keadaan seperti penurunan suhu atau tekanan). Sebuah objek yang melakukan sensing disebut sensor. Sebagai contoh, tubuh manusia dilengkapi dengan sensor yang mampu menangkap informasi optik dari lingkungan (mata), informasi akustik seperti suara (telinga), dan bau (hidung). Ini adalah contoh dari sensor jarak jauh, maksudnya mereka tidak perlu menyentuh objek yang dipantau untuk mengumpulkan informasi. Dari segi teknis, sensor adalah perangkat yang menerjemahkan parameter atau peristiwa di dunia fisik menjadi sinyal yang dapat diukur dan dianalisis. Istilah lain yang umum digunakan adalah transduser, yang sering digunakan untuk menggambarkan sebuah perangkat yang mengubah energi dari satu bentuk ke yang lain. Sebuah sensor, kemudian, adalah jenis transduser yang mengubah energi di dunia fisik menjadi energi listrik yang dapat dikirimkan ke komputasi sebuah sistem atau controller. Contoh langkah-langkah dalam sensing (atau akuisisi data) ditunjukkan pada Gambar 2.1.
Fenomena di dunia nyata (sering disebut sebagai proses atau sistem) yang diamati oleh perangkat sensor. Sinyal-sinyal listrik yang dihasilkan sering tidak siap untuk diproses segera, oleh karena itu diterapkan tahap pengkondisian sinyal. Di sini, berbagai operasi dapat diterapkan pada sinyal sensor untuk digunakan lebih lanjut. Misalnya, sinyal sering membutuhkan amplifikasi (atau atenuasi) untuk mengubah besarnya sinyal agar lebih cocok dengan berbagai konversi analog-ke-digital. Selanjutnya, pengkondisian sinyal sering menerapkan filter untuk menghilangkan noise sinyal yang tidak diinginkan dalam rentang frekuensi tertentu (misalnya, filter highpass dapat digunakan untuk menghapus 50 atau 60 Hz). Setelah pengkondisian, sinyal analog diubah menjadi sinyal digital menggunakan converter analog-ke-digital (ADC). Sinyal sekarang tersedia dalam bentuk digital dan siap untuk diproses lebih lanjut, disimpan, atau visualisasi. (Waltenegus Dargie, 2010)
Gambar 2.1 Akuisisi Data (Waltenegus Dargie, 2010)
2.3 Jaringan Sensor Nirkabel
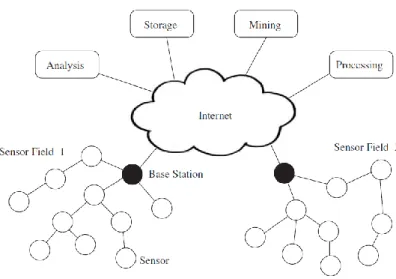
Dalam jaringan sensor nirkabel banyak sensor terhubung menuju controller dan stasiun pengolahan langsung (misalnya, menggunakan local area network). Oleh karena itu, sensor nirkabel tidak hanya komponen penginderaan, tetapi juga mengenai kemampuan on-board processing, komunikasi, dan penyimpanan. Dengan tambahan ini, sensor node sering kali tidak hanya bertanggung jawab untuk pengumpulan data, tetapi juga untuk analisis jaringan, korelasi, dan fusi data sensor sendiri dan data dari node sensor lainnya. Ketika banyak sensor kooperatif memantau lingkungan fisik yang besar, mereka membentuk jaringan sensor nirkabel (JSN). Node sensor berkomunikasi tidak hanya dengan satu sama lain, tetapi juga dengan base station (BS) menggunakan komunikasi wireless, yang memungkinkan untuk menyebarkan data sensor untuk pengolahan jarak jauh, visualisasi, analisis, dan sistem penyimpanan. Misalnya, pada Gambar 2.2 menunjukkan dua bidang sensor pemantauan dua wilayah geografis yang berbeda dan menghubungkan ke Internet menggunakan base station mereka.
Kemampuan node sensor pada JSN dapat bervariasi, yaitu, sensor sederhana yang dapat memantau fenomena fisik tunggal, sementara yang lebih kompleks menggabungkan banyak teknik sensing yang berbeda (misalnya, akustik, optik, magnetik). Tiap sensor bisa menggunakan kemampuan komunikasi yang berbeda, misalnya, menggunakan ultrasound, inframerah, atau teknologi frekuensi radio dengan berbagai kecepatan data dan latency. Sementara sensor sederhana hanya dapat mengumpulkan dan mengkomunikasikan informasi tentang lingkungan
yang diamati, perangkat yang lebih kuat (misalnya, perangkat dengan pengolahan yang besar, energi, dan kapasitas penyimpanan) juga dapat melakukan pengolahan dan agregasi fungsi yang luas. Perangkat tersebut sering mendapat pekerjaan tambahan dalam JSN, misalnya, membentuk komunikasi backbone yang dapat digunakan oleh perangkat sensor yang sumber dayanya terbatas untuk mencapai base station. (Waltenegus Dargie, 2010)
Gambar 2.2 Jaringan Sensor Nirkabel (Waltenegus Dargie, 2010)
Sebuah JSN dapat terdiri dari 2 atau lebih node, yaitu node client dan node server. Setiap node mampu mengirimkan data ke node lainnya secara single-hop atau sekali pengiriman. Sistem menggunakan transmisi data unicast dan menggunakan 2 buah node untuk saling mengirimkan data. Selain itu node server dan node client terhubung dengan PC dan keduanya berfungsi sebagai sensing device atau node sensor (F. Akyildiz dan Can Vuran 2010). Node sensor umumnya terdiri dari 3 komponen dan dapat terdiri dari board yang terpisah-pisah atau bisa juga sebagai sebuah sistem embedded terintegrasi, yaitu:
Modul nirkabel atau mote merupakan komponen kunci suatu jaringan sensor. Modul ini mempunyai kemampuan komunikasi antar modul dan mempunyai memori yang besar untuk penyimpanan program aplikasi dan data.
Board Sensor merupakan suatu board yang umumnya terdiri dari beberapa sensor skalar atau sensor multimedia. Board ini bisa terintergarasi pada mote (bisa juga tidak).
Board pemrograman disebut juga board Gateway. Pada board ini terdapat beberapa antarmuka seperti Wifi, USB, atau port serial untuk mengkoneksikan mote dengan jaringan atau dengan PC/laptop. Fungsiboard ini sebagai antarmuka untuk memprogram mote atau untuk mengambil data dari mote.
Modul-modul nirkabel dalam jumlah terbatas telah dikembangkan seiring dengan dikembangkannya berbagai jenis sensor berdasarkan aplikasi penggunaannya. Modul-modul yang awalnya lebih banyak digunakan untuk membantu penelitian di bidang JSN ini mempunyai beragam perbedaan dalam hal kecepatan prosesor, pemrograman dan ukuran unit penyimpanan, frekuensi operasi, dan kecepatan transmisi. Timeline untuk platform JSN diperlihatkan pada Gambar 2.3 (F.Akyildiz dan Can Vuran, 2010). Platform yang ada dapat diklasifikasikan menjadi dua didasarkan pada kemampuan dan penggunaan, yaitu low end dan high end. ( N.P Sastra,2015)
Low end: platform pada kategori ini mempunyai kemampuan terbatas dan hanya digunakan untuk data skalar, seperti untuk temperatur dan kelembaban. Hal utama pada platform ini adalah penggunaan energi seminimal mungkin. Perangkat pada kategori ini mempunyai kemampuan pemrosesan yang rendah dan mempunyai unit penyimpan yang kecil dengan sistem komunikasi standar IEEE.802.15.4 pada radio CC2240.
High end: platform pada kategori ini mempunyai kemampuan lebih tinggi pada komputasi dan pemrosesan serta didisain untuk melakukan pemrosesan konten multimedia dengan cepat dan efisien. Beberapa perangkat ini dapat
bekerja pada berbagai sistem operasi seperti TinyOS, LinuxOS dengan aplikasi java, dan .NET micro frameworks serta dapat dgunakan pada lebih dari satu jenis radio pada kecepatan transfer data berbeda (seperti IEEE 802.15.4, 802.11, dan Bluetooth) (N.P Sastra,2015)
Gambar 2.3 Perkembangan JSN ( N.P Sastra,2015)
2.4 Konsumsi Energi pada Jaringan Sensor Nirkabel
Kendala yang paling sering dikaitkan dengan desain jaringan sensor adalah bahwa sensor node beroperasi dengan sumber daya energi yang terbatas. Tiap sensor node menggunakan baterai sebagai sumber energi, yang harus digantikan atau diisi ulang (misalnya, menggunakan tenaga surya) saat habis. Apakah baterai dapat diisi ulang atau tidak secara signifikan mempengaruhi strategi diterapkan untuk konsumsi energi. Untuk baterai nonrechargeable, node sensor harus dapat beroperasi sampai waktu yang diinginkan atau baterai bisa diganti. Panjangnya waktu beroprasinya node tergantung pada jenis aplikasi, misalnya, pemantauan gerakan glasial yang mungkin memerlukan sensor yang dapat beroperasi selama beberapa tahun sementara sensor pada medan perang hanya diperlukan selama beberapa jam atau beberapa hari.
Hal yang sangat penting dalam jaringan sensor nirkabel adalah efisiensi energi. Persyaratan ini menembus setiap aspek sensor node dan desain jaringan. Misalnya, pilihan yang dibuat pada physical layer dari node sensor mempengaruhi konsumsi energi seluruh perangkat (Shih et al. 2001). Untuk menghitung konsumsi energi pada jaringan sensor visual nirkabel, digunakan rumus 2.1 sbb.
𝐸𝑊𝑉𝑆𝑁= 𝐸𝑐𝑎𝑝𝑡+ 𝐸𝑝𝑟𝑜𝑐+ 𝐸𝑐𝑜𝑚𝑚 (2.1)
Dimana 𝐸𝑐𝑎𝑝𝑡 adalah konsumsi energi saat penangkapan citra, 𝐸𝑝𝑟𝑜𝑐 adalah konsumsi energi saat pengolahan citra, dan 𝐸𝑐𝑜𝑚𝑚 adalah konsumsi energi saat pengiriman citra (N.P Sastra,2015).
Medium Access control (MAC) layer bertanggung jawab untuk menyediakan node sensor dengan akses ke saluran nirkabel. Beberapa strategi MAC untuk jaringan komunikasi contention-based, yaitu, node mungkin mencoba untuk mengakses setiap saat, berpotensi menyebabkan tabrakan antara beberapa node, yang harus ditangani oleh lapisan MAC untuk memastikan bahwa transmisi akhirnya akan berhasil. Kerugian dari pendekatan ini meliputi overhead energi dan penundaan yang terjadi oleh coalission dan recovery mechanism dan node sensor mungkin harus “mendengarkan” media setiap saat untuk memastikan bahwa tidak ada transmisi yang terlewat. Oleh karena itu, beberapa protokol MAC untuk jaringan sensor adalah contention-free. (Waltenegus Dargie, 2010)
2.5 IEEE 802.11
Pada tahun 1999, Institute of Electrical and Electronics Engineers (IEEE) menerbitkan 802.11 LAN nirkabel standar, menentukan phsycal dan link layer dari model OSI untuk koneksi nirkabel. IEEE 802.11 juga sering disebut sebagai "Wireless Fidelity" (Wi-Fi), sertifikasi diberikan oleh Wi-Fi Aliance, sebuah kelompok yang menjamin kompatibilitas antara perangkat keras yang menggunakan standar 802.11. Wi-Fi menggabungkan konsep CSMA/CA dan MACAW, dan juga memberikan fitur yang dapat menghemat energi.
IEEE 802.11 dapat digunakan dalam Point Coordination Function (PCF) atau Distributed Coordination Function (DCF). Dalam mode PCF, komunikasi antar perangkat berjalan melalui badan pusat yang disebut access point (AP) atau base station. Dalam mode DCF, perangkat berkomunikasi langsung dengan satu sama lain (disebut sebagai mode ad-hoc). IEEE 802.11 didasarkan pada CSMA/CA, dimana sebelum node mengirimkan data, node merasakan adanya media yang beraktivitas. Jika medium idle selama setidaknya satu periode yang disebut ruang IFS DCF (DIFS), node diperbolehkan untuk mengirimkan data (Gambar 2.4). Jika tidak, perangkat mengeksekusi algoritma backoff untuk menunda. Ini merupakan algoritma acak memilih sejumlah slot waktu untuk menunggu dan menyimpan nilai ini dalam backoff counter. Untuk setiap slot waktu yang berlalu tanpa aktivitas di jaringan, counter melakukan pengurangan
nilai dan perangkat dapat mencoba transmisi ketika counter ini mencapai nol. Jika aktivitas terdeteksi sebelum counter mencapai nol, perangkat menunggu sampai saluran telah diam untuk jangka waktu DIFS sebelum terus pengurangan nilai counter. (Waltenegus Dargie, 2010)
Gambar 2.4 IEEE 802.11 Medium Access Control (Waltenegus Dargie, 2010)
2.6 Citra
Citra merupakan istilah lain untuk gambar sebagai salah satu komponen multimedia yang memegang peranan sangat penting sebagai bentuk informasi visual. Citra mempunyai karakteristik yang tidak dimiliki oleh data teks, yaitu citra kaya dengan informasi. (Rinaldi Munir, 2010)
Meskipun sebuah citra kaya akan informasi, namun sering kali citra yang dimiliki mengalami penurunan mutu, misalnya mengandung cacat atau noise. Tentu saja citra semacam ini menjadi lebih sulit untuk diinterpretasikan karena informasi yang disampaikan oleh citra tersebut menjadi berkurang.
Suatu citra dapat didefinisikan sebagai fungsi f (x,y) berukuran M baris dan N kolom, dengan x dan y adalah koordinat (x,y) dinamakan intensitas atau tingkat keabuan dari citra pada titik tersebut. Apabila nilai x,y dan nilai amplitudo f secara keseluruhan berhingga (finite) dan bernilai diskrit, maka dapat dikatakan bahwa citra tersebut adalah citra digital.
2.6.1 Matriks Bitmap
Citra bitmap adalah susunan bit-bit warna untuk tiap piksel yang membentuk pola tertentu. Pola-pola warna ini menyajikan informasi yang dapat dipahami sesuai dengan persepsi indera penglihatan manusia. Format ini
mampu menyimpan informasi dengan kualitas tingkat 1 bit sampai 24 bit. Citra bitmap didefinisikan sebagai fungsi f (x,y) dengan x dan y adalah koordinat bidang. Besaran f untuk tiap koordinat (x,y) disebut intensitas atau derajat keabuan citra pada titik tersebut.
Sehingga dapat dikatakan bitmap dimodelkan dalam bentuk matriks. Nilai piksel atau entri-entri dari matriks ini mewakili warna yang ditampilkan di mana ordo matriks merupakan dimensi panjang dan lebar dari bitmap. Nilai-nilai warna ditentukan berdasarkan intensitas cahaya yang masuk. Dalam komputer, derajat intensitas cahaya diwakili oleh bilangan cacah. Nilai 0 menerangkan tidak adanya cahaya sedangkan nilai yang lain menerangkan adanya cahaya dengan intensitas tertentu. Nilai-nilai ini bisa didapatkan melalui fungsi-fungsi yang disediakan oleh bahasa pemrograman berdasarkan input berupa lokasi entri-entri matriks yang hendak dicari.
2.6.2 Piksel
Piksel (Picture Elements) adalah nilai tiap-tiap entri matriks pada bitmap. Rentang nilai-nilai piksel ini dipengaruhi oleh banyaknya warna yang dapat ditampilkan. Jika suatu bitmap dapat menampilkan 256 warna maka nilai-nilai pikselnya dibatasi dari 0 hingga 255. Suatu bitmap dianggap mempunyai ketepatan yang tinggi jika dapat menampilkan lebih banyak warna. Prinsip ini memberikan contoh dua buah bitmap dapat memiliki perbedaan dalam menangani transisi warna putih ke warna hitam. Perbedaan ketepatan warna bitmap menjelaskan bahwa bitmap sebelah atas memberikan nilai untuk warna lebih sedikit daripada bitmap di bawahnya. Untuk bitmap dengan pola yang lebih kompleks dan dimensi yang lebih besar, perbedaan keakuratan dalam memberikan nilai warna akan terlihat lebih jelas. Sebuah citra adalah kumpulan piksel–piksel yang disusun dalam larik dua dimensi. Indeks baris dan kolom (x,y) dari sebuah piksel dinyatakan dalam bilangan bulat. Piksel (0,0) terletak pada sudut kiri atas pada citra, indeks x begerak ke kanan dan indeks y bergerak ke bawah. Konvensi ini dipakai merujuk pada cara penulisan larik yang digunakan dalam pemrograman komputer. Letak titik
origin pada koordinat grafik citra dan koordinat pada grafik matematika terdapat perbedaan. Hal yang berlawanan untuk arah vertikal berlaku pada kenyataan dan juga pada sistem grafik dalam matematika yang sudah lebih dulu dikenal.
2.6.3 Cahaya
Cahaya merupakan radiasi elektromagnetik yang menstimulasi sistem penglihatan manusia. Cahaya ditampilkan sebagai sebuah distribusi energi spektrum L(λ) dimana λ adalah panjang gelombang cahaya yang dapat diterima oleh sistem penglihatan manusia. Panjang gelombang cahaya yang dapat diterima mata adalah 350 hingga 780nm.
Jangkauan iluminasi yang dapat diterima oleh sistem penglihatan manusia adalah 1 hingga 10¹º. Luminance dari suatu obyek tidak tergantung dari luminance latar sekelilingnya. Lain hal dengan brightness sebuah obyek yang merupakan tingkat luminance yang diterima oleh mata dan sangat tergantung dari luminance latar sekitarnya. Hal ini menyebabkan sebuah obyek dengan latar yang berbeda dapat memiliki tingkat luminance yang sama namun dengan tingkat brightness yang berbeda. (Boldson H, 2015)
2.6.4 Akuisisi Citra
Proses akuisisi citra adalah pemetaan suatu pandangan (scene) menjadi citra kontinyu dengan menggunakan sensor. Ada beberapa macam sensor untuk akuisisi citra, yaitu:
1. Sensor tunggal (single sensor) 2. Sensor garis ( sensor strip) 3. Sensor larik (sensor array)
Sensor tunggal yang paling familiar adalah photodioda. Photodioda terbentuk dari silikon yang memiliki tegangan keluaran yang sebanding dengan cahaya. Untuk menciptakan citra dua-dimensi dengan menggunakan sensor ini, harus ada proses pemindahan relatif di setiap sumbu x dan y antara sensor dan objek.
Sensor garis melakukan pencitraan satu arah. Sensor ini berupa deretan sensor yang disatukan dalam satu baris sehingga dapat melakukan akuisisi sumbu x secara bersamaan. Untuk mengakuisisi citra keseluruhan, sensor digerakkan searah sumbu y.
Sensor larik berbentuk larik dua-dimensi dan banyak sekali ditemukan dalam kamera digital. Sensor larik pada kamera digital disebut sensor CCD (charge-coupled device) dengan ukuran rata-rata mencapai 4000 x 4000 elemen. Sensor akan menangkap setiap iluminasi yang dipantulkan oleh objek dan akan diproyeksikan ke dalam bidang citra. Secara bersamaan sensor larik akan menghasilkan keluaran yang setara dengan integrasi dari cahaya yang diterima setiap sensor. (Boldson H, 2015)
2.7 Background Subtraction
Background subtraction merupakan operasi pengolah citra yang paling mendasar untuk aplikasi keamanan video, (Toyama, 1999) yang dapat dioperasikan dengan lokasi kamera yang tidak berubah. Untuk dapat mengoperasikan background subtraction, pertama – tama harus dilakukan identifikasi background. Lalu background dibandingkan dengan citra tiap frame dan kemudian dikurangkan. Objek yang tersisa setelah pengurangan diasumsikan sebagai objek foreground.
Untuk mendefinisikan background dan foreground, background subtraction menggunakan model “scene” pada level yang lebih tinggi, dimana bisa didefinisikan beberapa tingkat di antara foreground dan background, dan metode berbasis waktu yang dapat membedakan foreground yang tidak bergerak dan mendefinisikannya sebagai background. Hal ini dilakukan dengan memanfaatkan fungsi motion detection sehingga saat objek bergerak, objek tersebut ditandai “positif” (pada lokasi baru) dan ditandai “negatif” (pada lokasi sebelumnya).
Dengan cara ini, objek foreground yang baru akan didefinisikan sebagai “foreground baru” dan ditandai sebagai positif atau negatif. Pada area yang tidak terdapat objek foreground dilakukan pembaharuan background secara terus
menerus. Jika objek foreground tidak bergerak dalam waktu yang ditentukan, objek tersebut didefinisikan sebagai “foreground lama” dan bergabung menjadi background. Selain itu background subtraction dapat mendeteksi perubahan/pergerakan yang terjadi secara menyeluruh dan tiba – tiba, seperti saat lampu ruangan dihidupkan. Hal ini dilakukan dengan metode frame differencing. ( Gery Bradski, 2008)
2.7.1 Frame Differencing
Metode background subtraction yang paling sederhana adalah dengan memisahkan frame antar frame dan melabeli tiap perbedaan yang ada sebagai foreground. Metode ini dimulai dengan segmentasi objek latar depan atau benda bergerak tersegmentasi dari latar belakang. Hal ini dilakukan dengan mengambil frame yang diperoleh pada saat t, dilambangkan dengan I(t) untuk dibandingkan dengan gambar latar yang dilambangkan dengan B.
Tiap piksel I(t) dilambangkan sebagai P[I(t)] dan dikurangi dengan tiap piksel pada posisi yang sama pada background yang dilambangkan sebagai P[B]. Sesuai dengan rumus 2.2 dan 2.3 berikut.
𝑃[𝐹(𝑡)] = 𝑃[𝐼(𝑡)] − 𝑃[𝐵] (2.2)
Dan dengan men- threshold hasil persamaan diatas didapatkan rumus :
|𝑃[𝐹(𝑡 + 1)] − 𝑃[𝐹(𝑡)]| > 𝑇ℎ𝑟𝑒𝑠ℎ𝑜𝑙𝑑 (2.3)
Dimana, P[F(t)] adalah tiap piksel pada foreground pada waktu t, dan
𝑃[𝐹(𝑡 + 1)] merupakan tiap piksel pada foreground pada waktu 𝑡 + 1. Pada
rumus 2.3, P[F(t)] didefinisikan sebagai background, karena piksel foreground merupakan piksel yang bergerak, oleh karena itu tiap piksel pada frame pada 𝑡 sebelumnya didefinisikan sebagai background. (B. Patel, 2012)
2.8 Threshold
Threshold merupakan tahap lanjut dari background subtraction dalam mengidentifikasi objek dari citra. Dalam OpenCV, function cvThreshold()
dengan memberikan ambang batas (threshold) pada sebuah array, kemudian sesuatu terjadi pada setiap elemen array tersebut, tergantung apakah elemen array tersebut berada di bawah atau di atas ambang batas. Tipe – tipe pada function cvThreshold()dapat dilihat pada Tabel 2.2
Tabel 2.2 Argumen pada Function cvThreshold()( Gery Bradski, 2008)
Threshol type Operation
CV_THRESH_BINARY 𝑑𝑠𝑡𝑖 = (𝑠𝑟𝑐𝑖> 𝑇)? 𝑀: 0
CV_THRESH_BINARY_INV 𝑑𝑠𝑡𝑖 = (𝑠𝑟𝑐𝑖> 𝑇)? 0: 𝑀
CV_THRESH_TRUNC 𝑑𝑠𝑡𝑖 = (𝑠𝑟𝑐𝑖> 𝑇)? 𝑀: 𝑠𝑟𝑐𝑖
CV_THRESH_TOZERO_INV 𝑑𝑠𝑡𝑖 = (𝑠𝑟𝑐𝑖> 𝑇)? 𝑠𝑟𝑐𝑖: 𝑀
CV_THRESH_TOZERO 𝑑𝑠𝑡𝑖 = (𝑠𝑟𝑐𝑖> 𝑇)? 𝑠𝑟𝑐𝑖: 0
Berdasarkan Tabel 2.2, setiap tipe threshold sesuai perbandingan tertentu antara i source pixel (srci) dan ambang batas (dilambangkan sebagai T). tergantung pada hubungan antara source pixel dan ambang batas, source pixel dsti dapat diset menjadi 0, src, atau nilai maksimal (dilambangkan sebagai M). Hasil tiap tipe threshold dapat dilihat pada Gambar 2.5.
Dalam skripsi ini digunakan metode threshold CV_THRES_BINARY yang menghasilkan nilai piksel maksimal jika nilai piksel melebihi ambang batas atau menghasilkan nilai piksel 0 apabila nilai piksel kurang dari ambang batas. Tipe ini digunakan karena menggunakan komputasi yang sederhana sehingga dapat mengurangi konsumsi beban perangkat.
2.9 Morphological Transformation
Transformasi morfologi dapat dilakukan dengan mudah dengan OpenCV. Transfomasi morfologi terdiri dari dilation dan erosion, yang dapat digunakan dalam berbagai konteks seperti menghilangkan noise, mengisolasi elemen individu, dan menggabungkan elemen yang berbeda pada citra. Morfologi juga bisa digunakan untuk menemukan gradien citra.
2.9.1 Dilation dan Erosion
Dilation adalah konvolusi beberapa citra atau wilayah citra, dengan beberapa kernel. Kernel dalam hal ini berbentuk persegi dengan titik jangkar ditengah. Kernel berperan untuk memindai citra dan menghitung jumlah piksel yang tumpang tindih dengan kernel tersebut dan mengganti nilai piksel gambar dengan nilai maksimal. Hal ini menghasilkan daerah terang pada citra seperti pada Gambar 2.6.
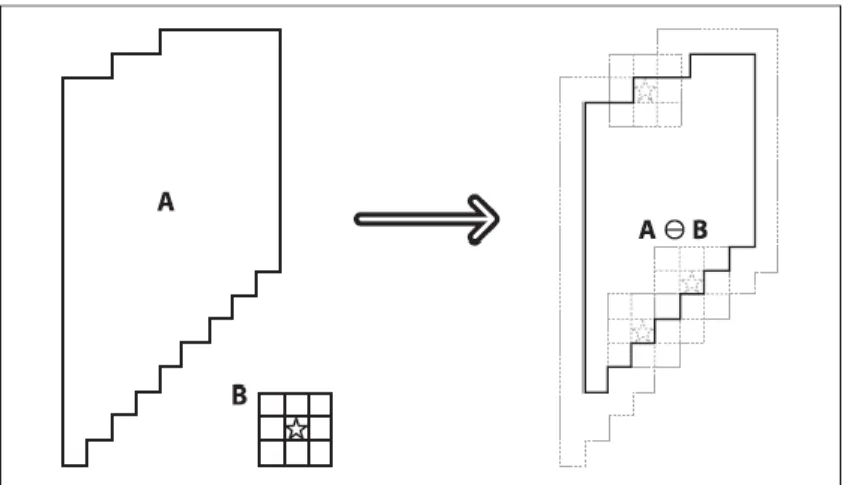
Sedangkan erosion adalah sebaliknya. Pada erosion, Kernel berperan untuk memindai citra dan menghitung jumlah piksel yang tumpang tindih dengan kernel tersebut dan mengganti nilai piksel gambar dengan nilai minimum. Hal ini dapat dilihat pada Gambar 2.7.
Gambar 2.7 Operasi Erosion ( Gery Bradski, 2008)
Dalam Gambar 2.6 dan 2.7 objek dilambangkan sebagai A dan kernel sebagai B, dan dapat disimpulkan pengaplikasian operasi dilation memperlebar wilayah objek A, sedangkan erosion mempersempit wilayah objek A. sehingga dilation berfungsi untuk menghaluskan cekung dan erosion berfungsi untuk menghaluskan tonjolan pada objek.
2.9.2 Opening dan Closing
Opening dan closing merupakan kombinasi dari operasi erosion dan dilation. Dalam opening, pertama – tama dilakukan erosion lalu diikuti dengan dilation. Hal ini dapat dilihat pada Gambar 2.8.
Opening sering kali digunakan untuk memisahkan piksel objek yang terlihat menonjol pada citra yang biasanya telah melewati proses threshold sebelumnya. Sedangkan pada closing, dilakukan operasi dilation terlebih dahulu dan diikuti dengan erosion. Hal ini dapat dilihat pada Gambar 2.9.
Gambar 2.9 Operasi Closing ( Gery Bradski, 2008)
Closing digunakan untuk menghubungkan komponen piksel objek pada citra. Hal ini dilakukan untuk mengurangi segmen yang tidak diinginkan. Untuk memberpejelas objek pada citra, biasanya operasi opening dilakukan terlebih dahulu untuk menghilangkan elemen piksel yang menonjol/noise dan diikuti dengan operasi closing digunakan untuk menghubungkan piksel objek yang berdekatan. Walaupun pada hasil akhir operasi opening dan closing terlihat mirip dengan operasi erosion dan dilation saja, namun kedua operasi ini cenderung menghasilkan objek yang lebih akurat.
2.10 Kontur
Kontur merupakan deretan titik yang mewakili sebuah kurva pada suatu citra. Dalam OpenCV kontur ditampilkan berurutan, dimana tiap deret titik kontur mengandung informasi lokasi dari titik kontur pada urutan selanjutnya. Function cvFindContours()menghasilkan kontur dari citra biner hitam putih. Penggunaan function cvFindContours()dalam menghasilkan kontur dapat dilihat pada Gambar 2.10.
Gambar 2.10 Penggunaan Function cvFindContours()( Gery Bradski, 2008)
Dalam Gambar 2.10 bagian atas ditampilkan citra dengan label A hingga E pada wilayah putih. Dan pada bagian bawah Gambar 2.10 ditampilkan hasil kontur pada citra tersebut dengan menggunakan function cvFindContours(). Dalam function cvFindContours()ada beberapa argumen yang dapat diubah untuk menentukan keluaran yang dinginkan. Argumen argumen tersebut dapat dilihat pada Listing Program 2.1.
Listing Program 2.1 Argumen pada Function cvFindContours()( Gery Bradski, 2008)
Argumen pertama merupakan input berupa citra. Citra tersebut harus berbentuk 8 bit dan biner. Saat cvFindContours() dijalankan, citra input
tersebut akan digunakan untuk komputasi. Argumen selanjutnya adalah
storage , yang mengindikasikan tempat dimana cvFindContours()
dapat mencari memory untuk menyimpan kontur yang didapat. Selanjutnya adalah
firstContour yang mengarah ke CvSeq*. Argumen headerSize
berfungsi untuk memberitahu cvFindContours()tentang objek yang menjadi target. Dua argumen terakhir adalah mode dan method yang berfungsi untuk menentukan kontur apa yang akan dicari dan bagaimana.
Terdapat 4 mode yang dapat digunakan yaitu CV_RETR_EXTERNAL,
CV_RETR_LIST, CV_RETR_CCOMP,dan CV_RETR_TREE. Mode pada
cvFindContours() mengindikasikan kontur apa yang akan dihasilkan.
Sedangkan metode yang dapat digunakan ada 5 yaitu CV_CHAIN_CODE, CV_CHAIN_APPROX_NONE,CV_CHAIN_APPROX_SIMPLE,CV_CHAIN_APP
ROX_TC89_L1, dan CV_LINK_RUNS. Dalam skripsi ini digunakan mode
CV_RETR_EXTERNAL yang hanya mencari kontur bagian terluar dari objek. Sedangkan metode yang digunakan adalah CV_CHAIN_APPROX_SIMPLE yang mencari kontur dengan cara mengkompresi segmen horizontal, vertikal, dan diagonal, dan hanya menyisakan titik akhir. Mode dan metode ini digunakan karena komputasi yang dilakukan sangat minim dan cocok untuk perangkat yang menggunakan sumber energi terbatas.
2.11 OpenCV
OpenCV adalah sebuah librarycomputer vision yang open source. Library ini ditulis dengan bahas C dan C++ dan dapat dijalankan pada OS Linux, Windows, dan MAC. Saat ini pengembangannya telah dapat berhubungan dengan Python, Ruby, Matlab, dan Bahasa lainnya. OpenCV didesain untuk komputasi yang efisien dan difokuskan pada aplikasi real time. OpenCV secara otomatis menggunakan library IPP yang sesuai jika library tersebut terinstall. Salah satu tujuan OpenCV adalah menyediakan infrastruktur computer vision yang mudah digunakan yang membantu orang membangun aplikasi citra dengan mudah. Library OpenCV mengandung lebih dari 500 function yang menjangkau banyak
area termasuk pabrik, inspeksi produk, pencitraan medis, keamanaan, user interface, dan robotika.
OpenCV terstruktur menjadi lima komponen utama, empat diantaranya ditampilkan pada Gambar 2.11. Komponen CV terdiri dari pengolahan gambar dasar dan algoritma computer vision pada tingkat yang lebih tinggi, MLL merupakan library machine learning yang meliputi banyak kasifikasi statistic dan clustering tools. HighGUI mengandung rutin I/O dan function mengenai storing dan loading video dan gambar, sedangkan CXCore berisi struktur dan konten data basic.
Gambar 2.11 Struktur OpenCV ( Gery Bradski, 2008)
Gambar 2.11 tidak termasuk CvAux (embedded HMM face recognition) dan algoritma eksperimental (background/foreground segmentation). CvAux meliputi:
Eigen Objects, sebuah teknik komputasi pengenalan yang efisien
Model Markov 1D dan 2D, teknik pengenalan statistik yang dipecahkan oleh pemrograman dinamis
Embedded HMM
Pengenalan gesture dari vision stereo
Ekstensi untuk Delaunay triangulation
Vision stereo
Texture descriptors
Pelacakan mata dan mulut
Pelacakan 3D
Menemukan kerangka (garis tengah) objek dalam sebuah adegan
Mematikan tampilan antara dua tampilan kamera
Segmentasi background-foreground
Video surveillance
Kalibrasi kamera kelas C ++ 2.12 Raspberry Pi 3
Raspberry Pi adalah serangkaian komputer mini (Mini PC) yang dikembangkan di Inggris oleh Raspberry Pi Foundation untuk mempromosikan pengajaran ilmu komputer dasar di sekolah dan di negara-negara berkembang. Penjualannya mencapai diluar target pasarnya yaitu untuk penggunaan lain seperti robotika.
Raspberry Pi 3, dengan prosesor quad-core Cortex-A53, memiliki kecepatan 10 kali kinerja sebuah Raspberry Pi 1. Sedangkan bila dibandingkan dengan Raspberry Pi 2, Raspberry Pi 3 menjadi 80% lebih cepat dari pada Raspberry Pi 2 dalam tugas paralel. Raspberry Pi Foundation merekomendasikan penggunaan Raspbian, sistem operasi berbasis Linux Debian sebagai sistem operasi Raspberry Pi. Sistem operasi pihak ketiga lainnya tersedia melalui situs resmi termasuk Ubuntu MATE, Snappy Ubuntu Core, Windows 10 IoT Core, RISC OS dan distribusi khusus untuk pusat media Kodi. Banyak sistem operasi lain juga bisa berjalan di Raspberry Pi. Tampilan dan spesifikasi Raspberry Pi 3 dapat dilihat pada Gambar 2.12 dan Tabel 2.3.
Gambar 2.12 Tampilan Raspberry Pi 3(wikipedia.org)
Tabel 2.3 Spesifikasi Raspberry Pi 3(wikipedia.org)
Spesifikasi Keterangan
SoC Broadcom BCM2837
CPU 4× ARM Cortex-A53, 1,2GHz
GPU Broadcom VideoCore IV
RAM 1GB LPDDR2 (900 MHz)
Networking 10/100 Ethernet, 2,4GHz 802.11n wireless
Bluetooth Bluetooth 4.1 Classic, Bluetooth Low
Energy
Storage microSD
GPIO 40-pin header, populated
Ports HDMI, 3,5mm analogue audio-video jack,
4× USB 2.0, Ethernet, Camera Serial
Interface (CSI), Display Serial Interface
(DSI)
2.13 Logitech Webcam C170
Logitech Webcam C170 didesain untuk mudah digunakan dalam memulai panggilan video dan mengirim gambar. Logitech webcam menggunakan teknologi Fluid Crystal. Dapat menangkap citra hingga resolusi 5MP dan merekam video dengan resolusi XVGA (1024 x 728). Dalam merekam video, logitech webcam c170 mampu mendapatkan 30 frame dalam tiap detiknya. Tampilan dan
spesifikasi kamera logitech webcam c170 dapat dilihat pada Gambar 2.13 dan Tabel 2.4.
Gambar 2.13 Kamera Webcam Logitech c170 ( logitech.com)
Tabel 2.4 Spesifikasi Kamera Webcam Logitech c170 ( logitech.com)
Spesifikasi Keterangan
Koneksi Kabel
Maksimum resolusi video 1024 x 768
Fitur
Logitech Fluid Crystal Technology, RightSound technology, digital noise
reduction
Support suara Ya
Fitur support suara microphone
Antarmuka komputer USB 2.0