i
TUGAS AKHIR
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh:
Nama : Ni Made Juliartuti NIM : 045114009
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
By:
Ni Made Juliartuti Student Number: 045114009
ELECTRICAL ENGINEERING STUDY PROGRAM DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY SANATA DHARMA UNIVERSITY
vi
KARYA INI KUPRSEMBAHKAN KEPADA
TUHANKU
BAPAK DAN IBUKU
KAKAK DAN KEPONAKANKU
ORANG YANG TUHAN ANUGRAHKAN UNTUKKU
SEMUA PIHAK YANG TELAH MEMBANTU TERCIPTANYA KARYA INI
TUHAN TIDAK BUTA DIA TAHU KALAU KITA BENAR-BENAR BERUSAHA
TUHAN JUGA TIDAK NGANTUK SEHINGGA SEMUA TAMPAK JELAS
SAAT TUHAN MENJAWAB DOAMU
IA MENAMBAH IMANMU,
SAAT TUHAN BELUM MENJAWAB DOAMU
IA MENAMBAH KESABARANMU
SAAT TUHAN MENJAWAB TAPI BUKAN DOAMU
viii
INTISARI
Di jaman modern seperti sekarang banyak mainan yang sudah menggunakan teknologi yang canggih, dimana salah satunya adalah mainan helikopter dengan menggunakan remote control. Tetapi remote control hanya dapat digunakan untuk komunikasi satu arah dan tampilan posisi dari model helikopter tidak ada. Penelitian dengan judul “Monitoring Gerakan Model Helikopter Berbasis Visual Basic” ditujukan untuk menggantikan peranan dari
remote control dalam pemberian gerakan pada model helikopter dan dapat memberikan tampilan gerakan model helikopter pada PC.
Program Monitoring Gerakan Model Helikopter Berbasis Visual Basic dapat di jalankan pada PC untuk memberikan perintah gerakan ke model helikopter sesuai dengan set point yang diinginkan. Program dapat memonitor data dari model helikopter dan menampilkan animasi dari gerakan model helikoter. Pada program ini juga terdapat status yang menyatakan keadaan koneksi yang sedang terjadi yaitu keadaan disconnect, connect dan busy.
Program pada penelitian ini dirancang dengan menngunakan software
Visual Basic. Data untuk animasi diperoleh dari model helikopter. Untuk mengkoneksikan alat ke software dapat dilakukan oleh user dengan menekan tombol connect. Pemilihan gerakan ketinggian dan sudut dapat dilakukan dengan melakukan pemilihan pada combo box ketinggian dan sudut. Penelitian ini berhasil dengan menggunakan komunikasi kabel serial RS232 dengan panjang pengujian sampai dengan 10 meter. Komunikasi menggunakan perangkat wireless
belum bisa digunakan.
ix
control only can used for one way communication and there is no position appearance of the helicopter model. Research with title “Movement Monitoring Helicopter Model Based on Visual Basic” attributed to replace the role of remote control in movement application of the helicopter model and can give movement appearance of the helicopter model on PC.
The Movement Monitoring Helicopter Model Based on Visual Basic program can carried on PC to give movement instruction to the helicopter model according to wanted set point. This program can monitoring data having as position from helicopter model and featured animation of the helicopter model movement. In this program also exist state that declares for connection situation that happen,i.e.disconnect, connect, and busy situation.
The program in this research designed using Visual Basic software. Data for animation gotten from helicopter model. For connect the instrument to software can be done by user by pressing the connect button. Elevation and angle movement is chosen by pressing elevation combo box or angle. This research success by use of RS 232 serial cable communication with longing examination up to 10 meters. That communication with wireless devise can’t be used.
x
Puji syukur penulis panjatkan kehadirat Ida Sang Hyang Widhi Wasa/Tuhan Yang Maha Esa atas rahmat dan karunia-Nya sehingga tugas akhir yang berjudul “Monitoring Gerakan Model Helikopter Berbasis Visual Basic” ini dapat diselesaikan. Sebagai persyaratan kelulusan dalam Program Strata 1 pada Jurusan Teknik Elektro Universitas Sanata Dharma.
Dalam menyusun tugas akhir ini penulis banyak memperoleh bantuan, dukungan, serta motivasi dari berbagai pihak. Untuk itu penulis mengucapkan terima kasih yang sedalam - dalamnya kepada:
1. Bapak dan Ibuku tercinta atas segala doanya yang tiada henti, kesabaran, dan dukungan baik secara moril ataupun materi.
2. Saudaraku Ni Putu Novi Sriwahyuni atas dukungan dan pengertiannya. 3. Ibu Bernadeta Wuri Harini,S.T.,M.T., selaku pembimbing I dan Bapak
Ir.Tjendro selaku pembimbing II yang telah memberikan petunjuk dan bimbingannya di dalam penulisan tugas akhir.
4. Bapak Ir.Tjendro dan Bapak Agustinus Bayu Primawan,ST,M.Eng selaku dosen pembimbing akademik penulis selama mengikuti kuliah di Universitas Sanata Dharma.
xii
HALAMAN JUDUL (INGGRIS) ... ii
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
HALAMAN PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN DAN MOTTO ... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xvi
DAFTAR TABEL ... xx
BAB I. PENDAHULUAN ... 1
1.1. Latar Belakang Masalah ... 1
1.2. Tujuan dan Manfaat ... 3
1.3. Batasan Masalah ... 4
1.4. Metodologi Penelitian ... 5
xiii
2.2.1. Gaya-gaya yang Bekerja pada Helikopter saat Terbang 16
2.2.2. Terbang Naik dan Turun ... 16
2.2.3. Kesetimbangan dalam Membelok ... 17
2.3. Komunikasi Serial ... 17
2.3.1. Spesifikasi Perangkat Keras ... 20
2.3.2. Kabel Serial RS232 untuk Komunikasi Data ... 20
2.4. Komunikasi Mikrokontroller ATMega 32 ... 23
2.5. Teknologi Wireless ... 29
2.6. Visual Basic ... 30
2.6.1. Langkah-langkah untuk Mengembangkan Aplikasi .... 31
2.6.2. Tampilan Layar Visual Basic ... 31
2.6.3. Komunikasi Serial pada Visual Basic ... 33
BAB III. PERANCANGAN ... 36
3.1. Prinsip Kerja Sistem ... 36
3.2. Perancangan Sistem Komunikasi ... 37
3.2.1. Komunikasi pada Mikrokontroller ATMega32. ... 37
3.2.2. Perancangan Komunikasi Wireless ... 40
3.2.3. Perancangan Komunikasi pada PC ... 42
3.3. Perancangan Sistem Monitoring pada PC ... 45
xiv
4.1.1. Form Password ... 51
4.1.2. Form Pilihan Gerakan pada Model Helikopter ... 53
4.1.2.1. Pengamatan Ketinggian ... 55
4.1.2.1.1.Perbandingan data ketinggian antara PC dengan hardware……… 61
4.1.2.2. Pengamatan Sudut ….. ... 62
4.1.2.2.1. Perbandingan data sudut antara PC dengan hardware………...71
4.2. Pengujian Transfer Data ... 73
4.2.1. Pengujian dan Pengamatan Perangkat Wireless ... 73
4.2.1.1. Pengujian dari TxA Menuju RxB ... 74
4.2.1.2. Pengujian dari RxA Menuju TxB ... 76
4.2.2. Pengujian dan Pengamatan dengan Kabel Serial ... 78
4.2.2.1. Pengujian Ketinggian ... 79
4.2.2.2. Pengujian Sudut ... 80
4.3. Proses Pengecekan Set Point ... 81
BAB V. KESIMPULAN DAN SARAN ... 84
5.1. Kesimpulan ... 84
xv
xvi
DAFTAR GAMBAR
Gambar 2-1 Bidang angkat pesawat sayap tetap dan helikopter dengan
airfoilnya………... 8
Gambar 2-2 Tekanan statik dan tekanan dinamik pada suatu objek ... 11
Gambar 2-3 Tabung venturi ... 12
Gambar 2-4 Garis arus (streamlines) didalam tabung venturi ... 12
Gambar 2-5 Garis arus (streamlines) disekitar airfoil ... 12
Gambar 2-6 Permukaan atas sayap ... 14
Gambar 2-7 Total tekanan pada permukaan atas sayap dan pada permukaan bawah sayap ... 14
Gambar 2-8 Tekanan statik dan dinamik ... 14
Gambar 2-9 Tekanan dan aliran udara pada bidang angkat ... 15
Gambar 2-10 Pola aliran disekitar airfoil ... 15
Gambar 2-11 Terbang naik dan terbang turun ... 17
Gambar 2-12 Kesetimbangan dalam membelok ... 17
Gambar 2-13 Konfigurasi DB9 ... 21
Gambar 2-14 Pin-pin pada mikrokontroler AT mega 32 ... 23
Gambar 2-15 Bentuk fisik modul tampak depan ... 30
Gambar 2-16 Jendela utama visual basic ... 31
Gambar 2-17 Jendela form ... 31
Gambar 2-18 Jendela kode editor ... 32
xvii
Gambar 2-20 Toolbox ... 32
Gambar 2-21 Jendela properti ... 33
Gambar 2-22 Form layout ... 33
Gambar 3-1 Rancangan diagram blok monitoring gerakan pada model helikopter ... 36
Gambar 3-2 Proses inisialisasi port ... 39
Gambar 3-3 Proses pengiriman data ... 39
Gambar 3-4 Flowchart proses penundaan untuk penerimaan data dari model helikopter ke PC ... 40
Gambar 3-5 Rangkaian skematik dari pemancar penerima ... 41
Gambar 3-6 Rangkaian skematik RS232 ... 41
Gambar 3-7 Diagram alir wireless dari sisi komputer ... 42
Gambar 3-8 Diagram alir wireless dari sisi mikrokontroler ... 42
Gambar 3-9 Proses Komunikasi ... 44
Gambar 3-10 Flowchart form password ... 46
Gambar 3-11 Tampilan password benar ... 46
Gambar 3-12 Tampilan password salah ... 46
Gambar 3-13 Flowchart form control model helikopter ... 49
Gambar 3-14 Rencana tampilan gerakan model helikopter ... 50
Gambar 4-1 Tampilan form password benar ... 52
Gambar 4-2 Tampilan form password salah ... 52
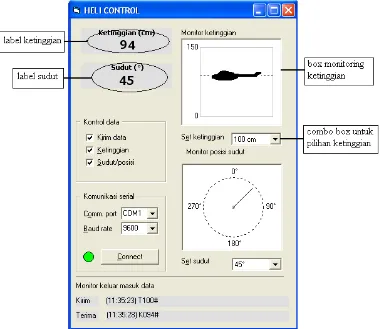
Gambar 4-3 Tampilan awal form pilihan gerakan ... 54
xviii
Gambar 4-5 Tampilan ketinggian 50cm pada LCD (hardware) ... 57
Gambar 4-6 Tampilan ketinggian 100cm pada LCD (hardware)... 58
Gambar 4-7 Pengujian ketinggian pada PC dengan set point 100cm ... 58
Gambar 4-8 Tampilan ketinggian sebelum mencapai set point 100cm pada LCD (hardware)………. 59
Gambar 4-9 Pengujian ketinggian pada PC sebelum set point 100cm terpenuhi ... 59
Gambar 4-10 Pengujian ketinggian sesudah mencapai set point 100cm pada LCD (hardware) ... 59
Gambar 4-11 Pengujian ketinggian pada PC sesudah set point 100cm terpenuhi ... 60
Gambar 4-12 Pengujian ketinggian pada PC dengan set point 120cm ... 61
Gambar 4-13 Tampilan ketinggian 120cm pada LCD (hardware) ... 61
Gambar 4-14 Pengujian sudut pada PC dengan set point 450 putar kanan ... 64
Gambar 4-15 Tampilan pada hardware dengan set point 450 putar kanan .. 64
Gambar 4-16 Tampilan pada hardware dengan set point 900 putar kanan ... 65
Gambar 4-17 Pengujian sudut pada PC dengan set point 900 putar kanan ... 65
Gambar 4-18 Pengujian sudut pada PC dengan set point 1350 putar kanan .. 66
Gambar 4-19 Tampilan pada hardware dengan set point 1350 putar kanan .. 66
Gambar 4-20 Pengujian sudut pada PC dengan set point 450 putar kiri ... 67
Gambar 4-21 Tampilan pada hardware dengan set point 450 putar kiri ... 67
Gambar 4-22 Pengujian sudut pada PC dengan set point 900 putar kiri ... 68
xix
Gambar 4-24 Pengujian sudut pada PC sebelum set point 900 putar kiri
terpenuhi ... 69
Gambar 4-25 Tampilan pada hardware sebelum set point 900 putar kiri terpenuhi……….………. 69
Gambar 4-26 Pengujian sudut pada PC sesudah set point 900 putar kiri terpenuhi ... 70
Gambar 4-27 Tampilan pada hardware sesudah set point 900 putar kiri terpenuhi ... 70
Gambar 4-28 Tampilan pada hardware dengan set point 1350 putar kiri ... 71
Gambar 4-29 Pengujian sudut pada PC dengan set point 1350 putar kiri ... 71
Gambar 4-30 Bentuk fisik TLP 434 ... 73
Gambar 4-31 Bentuk fisik RLP 434 ... 73
Gambar 4-32 Gambar skema pengujian pemancar penerima wireless ... 74
Gambar 4-33 Foto alat dari TxA menuju RxB ... 75
Gambar 4-34 Hasil pengujian dari TxA menuju RxB dengan baud rate 600 bps ... 75
Gambar 4-35 Foto alat dari RxA menuju TxB ... 77
xx
Tabel 2-2 Penentuan mode paritas ... 27
Tabel 2-3 Nama register beserta alamatnya ... 28
Tabel 2-4 Susunan kaki dari modul TLP dan RLP 434A ... 30
Tabel 4-1 Perbandingan data ketinggian antara PC dengan model helikopter 62
Tabel 4-2 Perbandingan data sudut putar kanan antara PC dengan model helikopter ... 72
Tabel 4-3 Perbandingan data sudut putar kiri antara PC dengan model helikopter ... 72
Tabel 4-4 Perbandingan hasil pengujian dari TxA menuju RxB dengan baud rate yang berbeda-beda ... 76
Tabel 4-5 Perbandingan hasil pengujian dari RxA menuju TxB dengan baud rate yang berbeda-beda ... 78
Tabel 4-6 Pengujian ketinggian ... 80
Tabel 4-7 Pengujian sudut putar kanan ... 80
1
1.1 Latar Belakang Masalah.
Konsep helikopter telah menjadi impian manusia sejak ratusan tahun
lalu. Leonardo da Vinci adalah orang pertama yang tercatat dalam sejarah sebagai
orang yang membuat ilustrasi dalam bentuk gambar tentang pesawat helikopter di
tahun 1483. [1]
Pesawat digambarkan sebagai sekrup udara (aerial screw) yang mampu bergerak secara vertikal. Dari ilustrasi tersebut pesawat semacam ini dinamakan
helikopter. Helikopter berasal dari bahasa Yunani yang terdiri atas dua suku kata,
yaitu “Helico”dan “Pleron” yang artinya sayap putar. Pada tahun 1903 dengan keberhasilan Wright bersaudara melakukan penerbangannya dengan pesawat
sayap tetap (fixed wing), maka perhatian orang lebih tertuju kepada pesawat fixed wing dari pada pesawat helikopter (rotary wing). Beberapa ahli melihat bahwa helikopter juga mempunyai kelebihan – kelebihan tertentu. Mereka melihat bahwa
pesawat fixed wing selalu memerlukan landasan pacu yang lebih panjang.
Pada tahun 1910 seorang perancang dari Rusia Igor Sikorsky membuat
helikopter dengan engine bertenaga 25 HP. Akan tetapi, pada saat itu ia lebih tertarik dan terlibat dalam pembuatan pesawat fixed wing. Barulah beberapa tahun kemudian ia menyalurkan bakatnya pada pesawat rotary wing.
Kebanyakan helikopter tersebut mempunyai sistem satu rotor anti togue
masalah yang belum memuaskan, terutama kehandalannya (relliability), akan tetapi kebutuhan pasar terus meningkat. Pada dekade selanjutnya peningkatan dan
pengembangan terus berjalan sehingga helikopter mendapat tempat strategis di
dunia kedirgantaraan.
Kelemahan yang masih ada saat itu adalah hampir tidak adanya mesin
penggerak (power plant) yang dirancang khusus untuk helikopter. Biasanya digunakan power plant yang sudah ada untuk pesawat fixed wing dengan beberapa modifikasi. Setelah bidang militer banyak tertarik pada bidang helikopter, barulah
muncul rancangan power plant yang khusus untuk helikopter.
Saat ini banyak eksperimen yang sedang berlangsung untuk dapat
mengatasi masalah itu. Dengan demikian, di masa depan akan ada pesawat
helikopter dengan kecepatan yang lebih tinggi dan jarak jangkau lebih jauh,
sehingga dapat dioperasikan dengan ekonomis.
Helikopter merupakan salah satu jenis transportasi. Seiring dengan
berkembangnya ilmu pengetahuan dan teknologi kecanggihan dari alat
transportasi pun semakin berkembang khususnya teknologi penerbangan.
Helikopter banyak digunakan untuk penerbangan ke daerah – daerah terpencil
untuk membantu korban bencana alam dan digunakan untuk perang. Kebanyakan
dari masyarakat tidak mengetahui alasan bahwa untuk menerbangkan helikopter
tidak memerlukan landasan pacu seperti pesawat terbang pada umumnya dan
dapat mendarat di laut lepas.
Helikopter dalam bentuk mainan juga banyak digemari dewasa ini
control. Penggunaan remote control ini memanfaatkan media udara untuk dapat berkomunikasi dengan helikopter. Tetapi dengan remote control hanya bisa melakukan komunikasi satu arah dan proses dari komunikasinya tidak dapat
dilihat secara visual.
Dari alasan di ataslah maka akan dibuat sistem monitoring model
helikopter dengan mengaplikasikan kecanggihan dari komputer dan teknologi
lainnya yang mendukung. Komputer dan model helikopter akan dapat
berkomunikasi untuk melakukan gerakan. Gerakan dari model helikopter akan
dimonitoring dari personal computer ( PC ) yang dapat dilakukan dengan dua arah. Pada PC akan ditampilkan ketinggian, sudut putar dan animasi.
Pada saat ini untuk mengontrol suatu alat kebanyakan masih
menggunakan kabel dan penggunaannya kurang efisien. Sehingga orang (user)
harus menggunakan kabel yang panjang di mana dapat mengganggu gerakan yang
akan dilakukan. Selain hal tersebut komunikasi dengan media udara (wireless) lebih berkembang dan efisien. Komunikasi wireless banyak digunakan pada pemancar penerima untuk telepon seluler.
1.2 Tujuan dan manfaat penelitian
Tujuan penelitian ini adalah:
1. Memonitor gerakan model helikopter dengan menggunakan PC
2. Memberikan informasi tentang gerakan yang akan dilakukan yaitu
ketinggian dan sudut putar pada model helikopter.
4. Untuk mengetahui proses komunikasi antara PC dengan model helikopter
melalui media udara.
Manfaat penelitian ini adalah:
1. Untuk perkembangan ilmu pengetahuan.
• Dapat memanfaatkan kinerja PC.
• Menambah aplikasi penggunaan Visual Basic.
2. Bagi masyarakat luas.
• Memberikan informasi tentang kemajuan di bidang teknologi .
• Dapat memberikan pengetahuan dasar tentang prinsip – prinsip
penerbangan helikopter.
1.3 Batasan masalah
Dalam perancangan alat ini, yang dijadikan pemikiran utama adalah
bagaimana memonitor gerakan dari model helikopter melalui PC dan dapat
ditampilkan pada layar monitor dengan menggunakan pemrograman Visual Basic.
Adapun batasan masalah yang digunakan dalam perancangan ini adalah
sebagai berikut:
1. Program akan menampilkan gerakan ketinggian, dan sudut putar dari
model helikopter.
2. Program menggunakan Visual Basic
4. PC mengirimkan masukan ke model helikopter untuk melakukan
gerakan.
5. Pada PC menunjukkan nilai yang diinginkan.
1.4 Metodologi penelitian.
Metodologi penelitian yang digunakan adalah sebagai berikut:
1. Studi Literatur
• Mempelajari refrensi tentang Visual Basic, wireless, komunikasi serial dan prinsip – prinsip dasar helikopter.
• Melalui diskusi dan konsultasi.
2. Survey
• Dengan melakukan survey ke SMK Penerbangan Angkasa Ardhya
Garini.
• Musium AAU Adisucipto.
• www.jogja-aeromodeling.co.id
3. Perancangan tampilan pada program Visual Basic
4. Peancangan pemancar penerima
5. Menentukan data – data yang akan dibutuhkan untuk proses komunikasi
antara PC dengan model helikopter.
8. Membuat perangkat lunak dari data – data yang diperoleh dengan
menggunakan program Visual Basic sehingga mampu menampilkan
animasi dari gerakan yang ditentukan.
9. Melakukan pengetesan dari program yang telah dibuat .
10. Pengambilan data.
11. Pembuatan laporan tugas akhir, berdasarkan data – data yang sudah
diperoleh dari proses pengetesan program dengan hardware dan berdasarkan data yang sudah diperoleh.
1.5. Sistematika Penulisan
Sistematika penulisan laporan tugas akhir ini adalah sebagai berikut :
BAB I : PENDAHULUAN
Bab ini berisi latar belakang masalah, tujuan dan manfaat dari penelitian, batasan masalah, metodologi penelitian, dan sistematika penulisan.
BAB II : DASAR TEORI
Bab ini berisi dasar berisi tentang semua literatur yang akan digunakan dalam penulisan tugas akhir.
BAB III : PERANCANGAN
BAB IV : HASIL DAN PEMBAHASAN
Bab ini berisi tentang, pengambilan data, penampilan data, pembahasan dan analisis hasil penelitian yang telah dilaksanakan. BAB V : KESIMPULAN DAN SARAN
8
2.1 Prinsip – prinsip Aerodinamik.
Pesawat terbang memerlukan suatu gaya angkat (lift) yang mampu
mengimbangi berat (weight) pesawat agar dapat mengudara. Gaya angkat tersebut
dihasilkan melalui suatu bidang angkat (lifting surface) yang dirancang
sedemikian rupa.[2]
a. Bidang Angkat.
Pesawat terbang bersayap tetap bidang angkatnya lebih dikenal
dengan sayap. Pada helikopter tidak dilihat adanya sayap seperti yang
terdapat pada pesawat bersayap tetap, tetapi bagian yang berputar lebih
dikenal dengan rotor yang berfungsi sebagai bidang angkatnya.
Sayap maupun daun-daun rotor mempunyai penampang lintang
yang khas disebut airfoil. Bentuk seperti ini dimaksudkan agar bila
bidang angkat dilintasi udara dengan kecepatan tertentu akan mudah
menghasilkan reaksi aerodinamik berupa gaya angkat. Lihat gambar 2-1 :
b. Gerak dan Kecepatan Airfoil
Sayap maupun daun-daun rotor dengan penampang lintangnya
tidak begitu saja menghasilkan gaya angkat. Diperlukan suatu gerak
sekaligus kecepatan (v) bagi airfoil. Dengan demikian akan ada aliran
udara yang melintas disekitar sayap ataupun daun rotor. Aliran udara
menjadi media bagi airfoil atau bidang angkat untuk mengembangkan
gaya-gaya aerodinamik.
Pada pesawat-pesawat bersayap tetap, diperlukan gerak maju
untuk menghasilkan kecepatan udara bagi bidang angkatnya. Gerak maju
tersebut umumnya dihasilkan melalui aksi propeller atau sistem propulsi
yang menghasilkan thrust (daya dorong).
Pada helikopter, rotornya tidak memerlukan gerak maju untuk
mendapatkan kecepatan, tetapi diperlukan suatu gerak putar bagi rotor
sehingga didapat suatu kecepatan putar (U).
c. Gerak Benda dan Udara
Di dalam aerodinamika terdapat gerak relatif, karena
kenyataannya dalam mempelajari sifat-sifat aerodinamik suatu benda
(objek) yang bergerak di udara, gerakannya bukan terhadap tanah
(ground), karena merupakan gerak absolut, tetapi gerak benda tersebut adalah terhadap udara yang disebut dengan gerak relatif. Dengan
demikian, akan ada pula kecepatan relatif (Relative velocities).
kecepatan udara terhadap benda. Keduanya mempunyai besaran yang
sama tetapi berlawanan arah.
d. Prinsip – prinsip Aliran Udara.
Prinsip – prinsip aliran udara meliputi 4 unsur, yaitu:
1. Tekanan Statik
Udara mempunyai berat, dengan beratnya ini udara
menimbulkan tekanan yang disebut tekanan statik. Misalnya udara
yang tenang menimbulkan tekanan statik. Tekanan ini aksinya ke
segala arah adalah sama, jadi gayanya untuk setiap benda adalah
setimbang dan tidak ada resultan gaya.
2. Tekanan Dinamik
Udara yang bergerak akan memberikan suatu energi tambahan.
Hal ini dikarenakan kecepatannya. Jika udara yang bergerak ditahan
pada suatu bidang permukaan, maka energi ini akan menyebabkan
suatu tambahan tekanan terhadap permukaan bidang yang
memaksanya terhenti, sehingga tekanan pada bidang tersebut
besarnya di atas tekanan atmosfer. Tambahan tekanan pada
permukaan bidang karena kecepatan udara disebut tekanan dinamik.
Tekanan dinamik tergantung pada kerapatan udara (ρ) dan kecepatan
3.
4.
Gambar 2
Garis – gar
Dal
konsep aru
arus yang m
Aliran di d
Beb
suatu zat c
tabung.
Den
mengalir m
yang melin
tabung. M
A, dan kec
Prin
konstan. Pr
bentuk tabu
Massa alir
2-2 Tekanan
ris Arus Uda
lam banyak
us udara (st
menggambar
dalam Tabun
berapa hal
air atau fluid
ngan prinsip
melalui tabu
ntas di setia
assa alir di
cepatan alir a
nsip aliran
rinsip massa
ungnya.
= konstan, m
n statik dan t
ara.
k aspek a
treamlines). rkan lintasan
ng
yang pentin
da, dapat dia
p suatu aliran
ng pipa ada
ap bagian a
dalam tabun
adalah
kontinyu in
a alir yang ko
maka
ekanan dina
aerodinamik
Streamlines
n satu partik
ng yang be
amati dengan
n yang kontin
alah konstan
adalah sama
ng dengan lu
……
ni menyatak
onstan ini da
amik pada su
biasanya
s adalah ga kel dari aliran
erkaitan den
n suatu alira
nyu, massa a
. Artinya m
a di setiap t
uas penampa ……… kan bahwa apat diterapk ……...…… uatu objek digunakan
aris – garis
n udara.
ngan aliran
an di dalam
aliran yang
massa fluida
titik dalam
ang tabung
….. (2.1)
Av adalah
kan apapun
Gambar 2-3 Tabung venturi
Jika dibuat garis – garis arus di dalam tabung venturi, akan
didapatka bentuk seperti gambar berikut:
Gambar 2-4 Garis arus (streamlines) di dalam tabung venturi Dari gambar diatas dapat kita lihat bahwa di mana kecepatan
alirnya meningkat, maka garis arusnya adalah rapat. Prinsip inipun
dapat diterapkan jika aliran udara bukan didalam tabung, tetapi
mengalir bebas di sekitar sayap. Dapat dilihat pada gambar 2-5.
Perhatikan pada bagian garis – garis yang arusnya merapat yang
terjadi pada bagian atas dari penampang sayap (airfoil) tersebut, hal ini menunjukkan adanya peningkatan aliran pada daerah tersebut.
dae terj mak tida e. Prin dim seh diti sesu sep kec teka sep din
ρ a
ada
Setiap
erah dimana
adi kenaika
kin merengg
ak berlaku un
nsip Bernou
Bentuk
maksudkan u
hingga meng
ingkatkan, m
uai dengan p
Prinsip panjang arus cepatan udar anan statik panjang alir nyatakan den Nilai y adalah tekan alah tekanan aliran sub garis arusny an kecepatan gang berarti
ntuk aliran u
lli
k sayap y
untuk mend
hasilkan tek
maka tekana
prinsip Bern
p Bernoulli
s alir tekan
ra disuatu te
udara”. Ke
ran udara
ngan persama
…
yang konstan
nan statik (d
dinamis (da
bsonik digam
ya makin me
n, dan daer
i terjadi pen
udara dengan
yang cemb
dapatkan ke
kanan udara r
an udara stat
noulli. menyatakan nan totalnya empat selalu ecepatan dan pada perm
aan sebagai b
………
n tersebut ad
dalam hal in
alam hal ini =
… mbarkan den erapat berart rah dimana nurunan kec n kecepatan bung pada ecepatan uda rendah. Bila
tis akan me
n bahwa, “pa
a akan teta
u akan diser
n tekanan u
mukaan saya
berikut:
………
dalah tekana
ni = energi p
= energi kine
………
ngan
garis-ti pada daer
garis – gar
cepatan. Ket
supersonik.
permukaan
ara lokal y
a kecepatan u
njadi lebih
ada suatu al
ap, maka p
rtai dengan
udara pada
ap atau bl
…...
an total (tota
potensial) d
etik) ……… garis arus, rah tersebut ris arusnya tentuan ini n atasnya yang tinggi udara lokal kecil yaitu liran udara, peningkatan penurunan setiap titik
lade yang
...(2.3)
al presure),
dan
Gambar 2-6 Permukaan atas sayap
Di sepanjang aliran jumlah energi potensial dan energi kinetik
adalah konstan. Ini berarti, semakin tinggi energi kinetik atau semakin
cepat sejumlah massa udara dipindahkan (mengalir) dari depan ke
belakang, maka akan semakin rendah energi potensialnya. Hal tersebut
berlaku pada permukaan atas maupun bawah dari sayap.
Gambar 2-7 Total tekanan pada permukaan atas sayap dan pada permukaan bawah sayap
Gambar 2-8 Tekanan statik dan dinamik
Rendahnya energi potensial dibawah tekanan atmosfer ini
merupakan suatu tekanan negatif, sehingga dapat memperbesar
konstribusi terjadinya gaya angkat. Semakin cepat mengalirnya sejumlah
gaya angkat yang terjadi. Tekanan negatif statik yang besar dihasilkan
pada permukaan, bidang angkat inilah yang memberikan dukungan
terbesar (sekitar 75%) dari total bidang angkat (lift). Sedangkan sisanya dihasilkan oleh tekanan dinamik pada permukaan tekanan sayap.
Berikut ini adalah gambaran aliran udara dan tekanan udara
yang terjadi pada bidang angkat ketika pesawat sedang terbang.
Gambar 2-9 Tekanan dan aliran udara pada bidang angkat
f. Pola Aliran Udara di sekitar Airfoil
Pola aliran di sekitar airfoil dapat dilihat pada gambar – gambar 2-10
2.2 Gerak Terbang helikopter
2.2.1 Gaya – gaya yang Bekerja pada Helikopter Saat Terbang
Ada tiga gaya yang bekerja pada saat helikopter terbang. Ketiga gaya yang
bekerja pada saat helikopter terbang, yaitu:
1. Berat helikopter w, menangkap di titik berat G
2. Resultan gaya hambat (drag) Fx yang berlawanan arah dengan gerakan
pesawat. Fx dianggap menjadi satu titik dengan berat G.
3. Lift FN yang menangkap di pusat rotor, tegak lurus terhadap rotation plane
(lihat gambar 2-11)
Untuk setimbangnya helikopter, resultan R dari gaya – gaya berat w dan
drag Fx harus sama besar tetapi berlawanan arah dengan lift FN (lihat gambar
2-12). Kondisi setimbang tersebut erat kaitanya dengan stabilitas terbang. Demikian
juga dalam keadaan terbang stasioner (hovering), gaya – gaya harus setimbang.
2.2.2 Terbang Naik dan Turun
Terbang vertikal dari kondisi hovering dimulai dari pilot pada collective pitch level, yaitu sebagai berikut (gambar 2-11)
Penambahan pitch, FN membesar, helikopter terbang naik (FN > w) Pengecilan pitch, FN mengecil dan helikopter terbang turun (FN < w).
Harus diperhatikan bahwa drag Fx, dengan peningkatan kecepatan vertikal
Vz, memberikan posisi setimbang (Vz = konstan) bilamana :
FN=P+ FX (terbang naik / ascending) ………(2.5)
Gambar 2-11 Terbang naik dan terbang turun
2.2.3 Kesetimbangan dalam Membelok
Didalam kondisi membelok gaya baru akan muncul, yaitu gaya sentrifugal
Fc. Jika tidak diimbangi akan mengakibatkan helikopter mengalami side slipping
(menggeser ke samping ). Untuk mengimbangi Fc, dilakukan dengan
memiringkan rotor disc secara lateral ke arah dalam belokan (gambar 2-12)
Komponen gaya THy ( hasil dari memiringkan rotor disc ) mengimbangi
gaya sentrifugal Fc. Semakin tinggi kecepatan maju v akan semakin besar radius
membeloknya ( R ).
Gambar 2-12 Kesetimbangan dalam membelok
2.3 Komunikasi Serial
Metode pengiriman data digital secara umum dibagi menjadi dua cara
yaitu pengiriman data secara paralel dan pengiriman data secara serial. Pada
Sedangkan pada pengiriman data secara paralel, data dikirim sekaligus bersama –
sama. Karena pada proses pengiriman data serial, data dikirim satu persatu maka
salah satu keunggulan proses pengiriman data secara serial dibandingkan paralel
adalah lebih menghemat jalur data. Jalur data yang digunakan dapat menggunakan
berbagai macam media, misalnya media udara. [3]
Dikenal dua cara komunikasi secara serial, yaitu komunikasi data sinkron
dan secara asinkron. Pada komunikasi data serial secara sinkron, clock dikirimkan bersama–sama dengan data serial. Sedangkan komunikasi data serial secara
asinkron, clock tidak dikirimkan bersama data serial, tetapi dibangkitkan secara
sendiri – sendiri baik pada sisi pengirim (transmitter) maupun pada sisi penerima
(receiver). Pada IBM PC kompatibel port serialnya termasuk jenis asinkron.
Komunikasi data serial ini dikerjakan oleh UART (Universal Asyncronous
Receiver Transmitter).
Pada UART, kecepatan pengiriman data (baud rate) pada sisi transmitter
dan pada sisi receiver harus sinkron. Untuk itu diperlukan sinkronisasi antara
transmitter dan receiver. Kecepatan transmisi (baud rate) dapat dipilih bebas
dalam rentang tertentu. Baud rate yang umum dipakai adalah 110, 135, 150, 300,
600, 1200, 2400, 9600 (bit/detik). Dalam komunikasi data serial, baud rate dari
kedua alat yang berhubungan harus di atur pada kecepatan yang sama.
Selanjutnya, harus ditentukan panjang data (6, 7, atau 8 bit), paritas (genap, ganjil
atau tanpa paritas), dan jumlah bit stop.
Pengiriman data serial melalui media udara menggunakan gelombang
adalah data yang dikirimkan ditumpangkan pada frekuensi pembawa dan
dipancarkan di udara oleh pemancar. Pada penerima frekuensi pembawa yang
mengandung data ditangkap dan dipisahkan dari data yang dibawa. Untuk dapat
mengirimkan data serial melalui udara minimal diperlukan suatu device yang
dapat melakukan proses penumpangan data serial digital ke frekuensi pembawa
dengan frekuensi yang lebih tinggi untuk kemudian dipancarkan ke udara.
Antarmuka kanal serial lebih kompleks/sulit dibandingkan dengan
antarmuka melalui kanal paralel, hal ini disebabkan karena:
1. Dari segi perangkat keras : adanya proses konversi data paralel menjadi
serial atau sebaliknya menggunakan piranti tambahan yang disebut UART
(Universal Asynchronous Receiver/Transmitter).
2. Dari segi perangkat lunak : lebih banyak register yang digunakan atau
terlibat.
Namun di sisi lain antarmuka kanal serial menawarkan beberapa kelebihan
dibandingkan secara paralel, antara lain:
1. Kabel untuk komunikasi serial bisa lebih panjang dibandingkan dengan
paralel. Data – data dalam komunikasi serial dikirimkan untuk logika `1`
sebagai tegangan -3 s/d -25 volt dan untuk logika `0` sebagai tegangan +3
s/d +25 volt
2. Jumlah kabel serial lebih sedikit yaitu TXD (saluran kirim), RXD (saluran
terima) dan ground.
3. Saat ini penggunaan mikrokontroller semakin populer, kebanyakan
Interface) yang dapat digunakan untuk komunikasi dengan port serial komputer.
2.3.1 Spesifikasi Perangkat Keras
Piranti – piranti yang menggunakan komunikasi serial meliputi:
• DTE = Data Terminal Equipment, yaitu komputer itu sendiri.
• DCE = Data Communication Equipment, misalnya modem, plotter
dan lain – lain.
Beberapa parameter yang ditetapkan EIA (Electronics Industy
Association) antara lain:
• `Space` (logika 0) antara tegangan +3 s/d 25 volt • `Mark` (logika 1) antara tegangan -3 s/d -25 volt
• Daerah tegangan antara +3 s/d -3 volt tidak didefinisikan.
• Tegangan rangkaian terbuka tidak boleh lebih dari 25 volt (dengan
acuan ground)
• Arus hubung singkat tidak boleh melebihi 500mA.
2.3.2 Kabel Serial RS 232 Untuk Komunikasi Data
RS 232 yang merupakan kabel serial, dapat digunakan untuk komunikasi
data. Komunikasi data ini bisa dilakukan antara dua komputer, maupun antara
komputer dengan peralatan lain, misalnya PLC (Programmable Logic Controller).
Ada dua jenis RS 232 yaitu 25 pin dan 9 pin.[4]
Semua chip UART kompatibel dengan TTL (termasuk sinyal TxD, RxD,
(RS232 level converter) yang berfungsi untuk mengkonversi sinyal TTL menjadi logika RS232.
DB 9 dapat dilihat pada gambar berikut :
Gambar 2-13 Konfigurasi DB9
Informasi mengenai pin-pin DB9 dapat dilihat pada tabel berikut:
Tabel 2-1 Pin – pin pada DB 9
No Pin Nama
1 Carrier Detect
2 Receive Data (RD)
3 Transmitted Data (TD)
4 Data Terminal Ready (DTR)
5 Signal Ground
6 Data Set Ready (DSR)
7 Request To Send (RTS)
8 Clear To Send (CTS)
9 Ring Indikator
Pin – pin tersebut dapat dibagi menjadi tiga kelompok fungsi yaitu:
1. Data Signals
a. Transmitted Data (TD)
Ditunjukkan kepada penerima, dimana data dibangkitkan oleh
pengirim
b. Receive Data (RD)
Ditunjukan kepada pengirim, dimana data diterima oleh
2. Control Signals
a. Request To Send (RTS)
Ditunjukkan kepada penerima, di mana pengirim menegaskan
bahwa akan mengirim data kepada penerima.
b. Clear To Send (CTS)
Ditunjukkan kepada pengirim, di mana penerima siap untuk
menerima, dan merupakan tanggapan dari RTS.
c. Data Set Ready (DSR)
Ditunjukkan kepada pengirim, dimana penerima siap untuk
beroperasi.
d. Data Terminal Ready (DTR)
Ditunjukkan kepada penerima, dimana pengirim siap untuk
beroperasi.
e. Ring Indicator (RI)
Ditunjukkan kepada pengirim, yang menandakan bahwa penerima
menerima sinyal dering pada kanal komunikasi.
f. Carrier Detect (CD)
Ditunjukkan kepada pengirim, yang menandakan bahwa penerima
2.4 Komunikasi Mikrokontroler ATMega 32
Pin – pin pada ATMega 32 dapat dilihat pada gambar 2-14 sebagai
berikut[5]:
Gambar 2-14 Pin –pin pada mikrokontroller ATMega 32
Konfigurasi pin mikrokontroler AVR ATMega 32
1. VCC merupakan pin yang berfungsi sebagai pin masukan catu daya.
2. GND merupakan pin ground.
3. Port B (PB0 – PB7) merupakan pin I/O dua arah dan pin fungsi
khusus, yaitu sebagai Timer/Counter, komparator analog dan SPI.
4. Port C (PC0 – PC7) merupakan pin I/O dua arah dan pin fungsi
khusus, yaitu TWI, komparator analog, input ADC dan Timer
Osilator.
5. Port D (PD0 – PD7) merupakan pin I/O dua arah dan pin fungsi
khusus, yaitu komparator analog, interupsi eksternal dan komunikasi
serial.
7. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
8. AVCC merupakan pin masukan tegangan untuk ADC.
9. AREF merupakan pin tegangan referensi ADC.
ATMega32 telah dilengkapi Universal Syncronous and Asyncronous
Serial Receiver and Transmitter (USART). Melalui USART dapat dilakukan komunikasi secara serial dengan komputer atau perangkat lainnya. Sistem
USART ATMega32 memiliki beberapa keuntungan dibandingkan dengan sistem
UART, yaitu :
1. Operasi full duplex.
2. Mode operasi asinkron dan sinkron.
3. Mendukung komunikasi multiprosesor.
4. Mode kecepatan transmisi berorde Mbps.
Komunikasi USART dilakukan melalui pin RXD (PD0) dan TXD (PD1)
serta pin XCK (PB0) untuk komunikasi syncronous. Untuk mengontrol USART
digunakan register UCSRA, UCSRB dan UCSRC (USART Control and Status
Register A,B,C) dan UBRR (USART Baud Rate Register).
1. UCSRA (USART Control and Status Register A).
a. RXC – USART Receive Complete, bit ini akan aktif jika data masuk.
b. TCX – USART Tranmit Complete, bit ini akan aktif pada saat selesai
melakukan pengiriman data.
c. UDRE – USART Data Register Empty, bit ini menandakan transmitter
d. FE – Framing Error, bit ini akan aktif jika terdapat error saat menerima data.
e. DOR – Data OveRun, bit ini akan aktif jika ada data yang masuk namun register UDR penuh ( belum dibaca ).
f. PE – Parity Error, bit ini akan aktif jika terdapat error parity saat menerima data.
g.U2X – Double USART Transmission Speed, bit ini digunakan untuk menggandakan kecepatan baud rate.
h. MPCM – Multiprocessor Communication Mode
2 UCSRB ( USART Control and Status Register B )
UCSRBmerupakan register 8 bit pengatur aktivasi penerima dan pengirim
USART.
a. XCIE – USART Receive Complete Interrupt Enable, mengatur aktivasi
interupsi penerimaan data serial. Bernilai awal 0 sehingga proses
penerimaan data berdasar pada sistem pooling. Jika bernilai 1 dan jika bit RXC pada UCSRA bernilai 1, interupsi penerimaan data serial akan
dieksekusi.
b. TXCIE – USART Transmit Complete Interrupt Enable, mengatur aktivasi
interupsi pengiriman data serial. Bernilai awal 0. Jika bernilai 1 dan jika
bit pada TXC pada UCSRA bernilai 1, interupsi pengiriman data serial
akan dieksekusi.
c. UDRIE – USART Data Register Empty Interrupt Enable, mengatur
UCSRA. Bernilai awal 0. Jika bernilai 1 maka interupsi akanterjadi hanya
jika bit UDRE bernilai 1.
d. RXEN – Receive Enable, merupakan bit aktivasi penerima serial ATMega32. Bernilai awal 0. Jika bernilai 1, maka penerima data serial
diaktifkan.
e. TXEN – Transmitt Enable, merupakan bit aktivasi pengirim serial ATMega32. Bernilai awal 0. Jika bernilai 1, maka pengirim data serial
diaktifkan.
f. UCSZ2 – Character Size, bersama dengan bit UCSZ1 dan UCSZ0 di
register UCSRC menentukan ukuran karakter serial yang dikirimkan. Pada
saat awal, ukuran karakter diset pada 8 bit.
g. RXB8 – Receive Data Bit 8, menampung bit ke 8 pada penerimaan 9-bit.
h. TXB8 – Transmit Data Bit 8
3. UCSRC ( USART Control and Status Register C )
UCSRC merupakan register 8 bit yang digunakan untuk mengatur mode
dan kecepatan komunikasi serial yang dilakukan.
a. URSEL – Register Select, merupakan bit pemilih akses antara UCSRC
dan UBRR karena memiliki alamat yang sama. Bernilai awal 1 sehingga
secara normal akan selalu mengakses register UCSRC.
b. UMSEL – USART Mode Select, merupakan bit pemilih mode komunikasi
serial antara sinkron dan asinkron. Bernilai awal 0 sehingga modenya
c. UPM 1:0 – Parity Mode, merupakan bit pengatur paritas. Bernilai awal 00 sehingga paritas tidak dipergunakan. Detail nilainya dapat dilihat pada
tabel berikut :
Tabel 2-2 Penentuan mode paritas
UPM 1 : 0 Mode Paritas
00 Tidak aktif
01 Tidak digunakan
10 Paritas genap
11 Paritas ganjil
d. USBS – Stop Bit Select, merupakan bit pemilih ukuran bit stop. Bernilai awal 0 sehingga jumlah bit stop yaitu 1 bit. Jika bernilai 0, maka jumlah
bit stop yaitu 2 bit.
e. UCSZ1danUCSZ0 merupakan bit pengatur jumlah karakter serial.
f. UCPOL – Clock Polarity, merupakan bit pengatur hubungan antara
perubahan data keluaran dan data masukan serial dengan clock
sinkronisasi. Hanya berlaku pada mode sinkron. Untuk mode asinkron, bit
ini diset 0.
Proses membangun hubungan komunikasi data serial memerlukan suatu
kecepatan data (data transfer rate ) yang sesuai, baik di sisi komputer maupun di sisi mikrokontroller. Ada beberapa hal yang perlu diperhatikan untuk membangun
hal tersebut pada mikrokontroler, yaitu nilai baud rate yang dipergunakan, setting format data stop bit, dan pengaturan beberapa register seperti : RXEN, TXEN,
dan RXCIE. Pengaturan baud rate dilakukan dengan memberikan nilai pada
register UBRR. Register UBRR adalah register 16 bit sehingga terdiri dariUBRRH
Nilai UBRR = (Frekuensi_kristal / (16 * baud_rate)) – 1 ……….(2.7)
Proses pengiriman data serial dilakukan per byte data dengan menunggu
register UDR yang merupakan tempat data serial akan disimpan menjadi kosong
sehingga siap ditulis dengan data yang baru. Proses tersebut menggunakan bit
yang ada pada register UCSRA, yaitu bit UDRE ( USART Data Register Empty ).
Bit UDRE merupakan indikator kondisi register UDR. Jika UDRE bernilai 1,
maka register UDR telah kosong dan siap diisi dengan data yang baru.
Proses penerimaan data serial dilakukan dengan mengecek nilai bit RXC
(USART Receive Complete) pada register UCRSA. RXC akan bernilai 1 jika ada
data yang siap dibaca di buffer penerima, dan bernilai 0 jika tidak ada data pada
buffer penerima. Jika penerima USART di nonaktifkan, maka bit akan selalu
bernilai 0. Untuk dapat menggunakan port serial (comm1) maka alamatnya harus
diketahui. Base addres comm1 biasanya adalah 1016 atau (3F8h) alamat tersebut
adalah alamat yang biasa digunakan, tergantuk dari komputer yang dipakai.
Setelah base addres diketahui, dapat ditentukan alamat register – register yang
digunakan untuk komunikasi port serial. Berikut adalah tabel register beserta
alamatnya:
Tabel 2-3 Nama register beserta alamatnya
Nama Register Alamat Register
TX Buffer 3F8h
RX Buffer 3F8h
Baud Rate Divisor Latch LSB 3F8h
Baud Rate Divisor Latch MSB 3F9h
Interrupt Enable Register 3F9h
Interrupt Identification Register 3FAh
Line Control Register 3FBh
1. Rx Buffer digunakan untuk menampung dan menyimpan data dari DCE. 2. Tx Buffer digunakan untuk menampung dan menyimpan data yang akan
dikirim ke port serial.
3. Baud Rate Divisor Latch LSB digunakan untuk menampung byte rendah
untuk pembagi clock pada IC UART agar didapat baud rate yang tepat.
4. Baud Rate Divisor Latch MSB digunakan untuk menampung byte tinggi untuk
pembagi clock pada IC UART.
5. Interrupt Enable Register digunakan untuk menset interupsi apa saja yang akan diberikan oleh komputer.
6. Interrupt Identification Register digunakan untuk menentukan urutan prioritas interupsi.
7. Line Control Register digunakan untuk menentukan jumlah bit data, jumlah bit paritas, dan jumlah bit stop.
8. Modem Control Register digunakan untuk mengatur saluran pengatur modem terutama saluran DTR dan saluran RST.
9. Line Status Register digunakan untuk menampung bit – bit yang menyatakan keadaan penerimaan atau pengiriman data dan status kesalahan operasi.
10.Modem Status Register digunakan untuk menampung bit – bit yang menyatakan status dari saluran hubungan dengan modem.
2.5 Teknologi wireless
TLP/RLP ialah modul hybrid murah RF ASK berupa pemancar dan
untuk aplikasi wireless, radio control atau telemetri. Gambar dibawah
menampilkan bentuk fisik chip tersebut[6].
Gambar 2-15 Bentuk fisik modul tampak depan RLP-434 (gambar A) dan TLP-434 (gambar B)
Untuk susunan kaki dari modul TLP dan RLP 434A dapat dilihat pada
tabel dibawah:
Tabel 2-4 Susunan kaki dari model TLP dan RLP 434A
2.6 Visual Basic
Microsof Visual Basic adalah bahasa pemrograman yang digunakan
untuk membuat aplikasi windows yang berbasis grafis (GUI – Graphical User
Interface).[7]
Visual Basic merupakan event-driven programming (pemrograman
terkendali kejadian) artinya program menunggu sampai adanya respon dari
pemakai berupa event/kejadian tertentu (tombol diklik, menu dipilih, dan
lain-lain). Ketika event terdeteksi, kode yang berhubungan dengan event (prosedur
2.6.1 Langkah – langkah untuk Mengembangkan Aplikasi
1. Membut user interface/tampilan. 2. Mengatur properti.
3. Menulis kode program.
2.6.2 Tampilan Layar Visual Basic
• Main Window (jendela utama) terdiri dari title bar (baris judul), menu bar,
dan toolbar. Baris judul berisi nama proyek, mode operasi Visual Basic
sekarang dan form aktif. Menu bar merupakan menu drop-down di mana
operasi dapat dikontrol dari lingkungan Visual Basic. Toolbar berisi
kumpulan gambar yang mewakili perintah yang ada dimenu. Jendela utama
juga menampilkan lokasi dari form yang aktif relatif terhadap sudut kiri atas layar (satuan ukurannya twips), juga lebar dan panjang dari form yang aktif.
Gambar 2-16 Jendela utama Visual Basic
• Form Windows (Jendela Form) adalah pusat dari pengembangan aplikasi
Visual Basic. Di sinilah tempat menggambar aplikasi.
• Jendela Kode Editor
Jendela kode editor secara umum berguna untuk menuliskan listing program
dalam pembuatan suatu aplikasi .
Gambar 2-18 Jendela Kode Editor
• Project Windows (Jendela Proyek) menampilkan daftar form dan modul
proyek. Proyek merupakan kumpulan dari modul form, modul class, modul
standar, dan file sumber yang membentuk suatu aplikasi.
Gambar 2-19 Jendela Proyek
• Toolbox adalah kumpulan dari objek yang digunakan untuk membuat user
interface serta control bagi program aplikasi.
• Propertis Windows (Jendela Properti) berisi daftar struktur setting properti
yang digunakan pada sebuah objek terpilih. Kotak drop-down pada bagian
atas jendela berisi daftar semua objek pada form yang aktif. Ada dua tab
tampilan: Alphabetic (urut abjad) dan Catagorized (urut berdasar kelompok). Di bagian bawah kotak terdapat properti dari objek terpilih
Gambar 2-21 Jendela Properti
• Form Layout Windows (Jendela Layout Form) menampilkan posisi form
relatif terhadap layar monitor.
Gambar 2-22 Form Layout
2.6.3 Komunikasi Serial Pada Visual Basic dengan MSComm
Dalam Visual Basic disediakan custom control untuk komunikasi serial
yaitu communication control. Bila belum ada dalam window toolbox Visual Basic,
project/components/microsoft comm control 6.0 (gambar telepon). Beberapa pengesetan properti adalah sebagai berikut :
• Name = Comm1
• Comm1.CommPort = 1
Menginisialisasi penggunaan Port Comm1 dengan nama
“comm1”. Jika digunakan port2 maka ditulis Comm1.CommPort2.
• Comm1.DTREnable = True
Menyatakan Data Terminal Ready siap digunakan.
• Comm1.Handshaking
Menyatakan penggunaan handshaking (jabat tangan)
• Comm1.InBufferSize = 1024
Menyatakan ukuran buffer masukan, yang menunjukkan jumlah
karakter yang bisa diterima.
• Comm1.InputLen = 0
Menyatakan banyaknya karakter yang akan dibaca jika input
digunakan. Nilai 0 memberitahu kontrol untuk membaca seluruh
buffer.
• Comm1.OutBufferSize = 512
Menyatakan ukuran buffer keluaran, yang menunjukkan jumlah
karakter yang bisa dikirim.
• Comm1.RSTEnable = True
Menyatakan pin RST siap digunakan
Digunakan untuk menset nilai baud rate, parity, jumlah bit data,
dan jumlah bit stop. Mengeset port Comm dengan parameter
sebagai berikut:
♦ Angka pertama menunjukkan kecepatan transmisi data
9600 baud
♦ N (none) menunjukkan tidak ada paritas yang digunakan.
Bila digunakan paritas adalah e (even) dan o (odd)
♦ Angka ketiga menunjukkan jumlah bit yang dikirim dalam
satu karakter yaitu 8 bit
♦ Angka terakhir menunjukkan bit akhir (stop bit) dalam satu
karakter.
• Comm1.PortOpen = True (false)
36
3.1 Prinsip Kerja Sistem
Pada perancangan sistem ini model helikopter dapat dikontrol secara
wireless pada jarak tertentu. Komunikasi yang digunakan antara PC dengan model helikopter menggunakan komunikasi serial. Setelah pemancar penerima
terhubung dengan masing – masing perangkat maka komunikasi dapat dilakukan.
Blok diagram untuk perancangan dari sistem dapat dilihat sebagai berikut:
Gambar 3-1 Rancangan diagram blok monitoring gerakan pada model helikopter berbasis Visusl Basic
Alur perancangan dari blok diagram di atas dapat dijelaskan sebagai berikut:
a. Model helikopter mengirimkan data ke PC melalui wireless device, pengiriman data ini digunakan oleh PC untuk mendeteksi bahwa
helikopter dalam keadaan ON.
b. Saat PC mendeteksi model helikopter ON, pada saat itu PC sudah
dapat melakukan pengiriman data ketinggian melalui wireless device
secara serial ke model helikopter.
c. Terdapat tiga pilihan ketinggian yang bisa dilakukan yaitu 0.5 , 1, 1.2
d. Setelah mencapai ketinggian tertentu (sama dengan set point yang telah ditentukan) selanjutnya pemilihan sudut dapat dilakukan.
e. Untuk gerakan sudut terdapat dua pilihan putaran yaitu putar kanan
dan putar kiri dengan sudut putaran 450, 900, 1350.
f. Data ketinggian dan sudut yang dikirimkan model helikopter melalui
wireless device akan digunakan untuk menampilkan animasi.
3.2 Perancangan Sistem Komunikasi
Pada perancangan sistem komunikasi akan dibahas mengenai komunikasi
pada mikrokontroller ATMega 32, perancangan komunikasi wireless dan perancangan komunikasi pada PC. Sistem komunikasi ini dimanfaatkan untuk
melakukan komunikasi antara PC dengan model helikopter.
3.2.1 Komunikasi pada Mikrokontroller ATMega 32
Komunikasi serial pada mikrokontroller ATMega 32 dilakukan melalui
port A, B, C, dan D yang merupakan pin I/O. Untuk melakukan komunikasi data secara serial diperlukan pengaturan data (baud rate) yang sesuai pada sisi komputer dan mikrokontroller.
Agar komunikasi dapat dilakukan maka perlu dilakukan pengaturan bit –
bit. Untuk pengiriman data 8 bit data maka nilai untuk register UCSZ0 harus di
set dengan nilai 3 karena akan difungsikan untuk menentukan jumlah karakter
sebanyak 8 bit. Register UCSZ0 terletak pada register UCSRC sehingga untuk
Sebagai pengirim dan penerima data serial maka perlu diaktifkan RXEN
dan TXEN. Mode pengiriman data dari mikrokontroller dapat berupa ASCII
string atau nilai heksadesimal. Untuk pengaturan pengiriman data secar sinkron atau asinkron diatur pada register UMSEL. Pada register ini nilai awalnya 0
sehingga modenya asinkron, jika diinginkan mode sinkron maka nilai yang dipilih
adalah 1.
Sebelum mikrokontroler dapat bekerja terlebih dahulu harus dilakukan
proses inisialisasi mikrokontroler. Pertama kali mikrokontroler akan mengirimkan
sinyal untuk melakukan proses inisialisasi port agar dapat digunakan untuk berkomunikasi. Selain proses inisialisasi juga perlu dilakukan pengaturan baud rate pada mikrokontroler agar kecepatan transfer datanya sama dengan komputer. Setelah itu mikrokontroler akan mengirimkan sinyal untuk melakukan
pengecekan, apakah proses komunikasi sudah dapat dilakukan. Jika proses
komunikasi belum dapat dilakukan atau terjadi error maka akan dilakukan proses inisialisasi dan pengaturan ulang nilai baud rate. Jika proses komunikasi sudah dapat dilakukan, selanjutnya mikrokontroler melakukan pengaturan format data
yang akan dikirim.
Untuk proses pengiriman data pada mikrokontroler dilakukan pada buffer. Untuk dapat menerima data yang akan dikirimkan buffer harus dalam keadaan kosong. Oleh karena itu sebelum data dikirimkan, mikrokontroler terlebih dahulu
masih terisi maka data yang dikirim akan ditunda dengan melakukan pengecekan
dan saat buffer sudah kosong maka buffer siap menerima data kembali.
Flowchart untuk proses inisialisasi dan pengiriman data dapat dilihat pada gambar 3-2 dan gambar 3-3:
Gambar 3-2 Proses inisialisasi port Gambar 3-3 Proses pengiriman data Saat PC sudah mendeteksi model helikopter pada keadaan ON dan PC
mengirim set point, maka untuk memasukkan data dari model helikopter ke
penerima di PC dibutuhkan penundaan waktu karena pada mikrokontroller
terdapat satu pin untuk mengirim dan menerima data. Flowchart proses penundaan untuk penerimaan data dari model helikopter ke PC dapat dilihat pada
gambar 3-4 sebagai berikut: Start
Inisialisasi
Set baud rate
S udah terhubung?
Form at data
Stop
N o
Yes
Start
Buffer empty
Masukkan data ke buffer
Kirim data
Stop
No
Gambar 3-4 Flowchart proses penundaan untuk penerimaan data dari model helikopter ke PC
3.2.2 . Perancangan Komunikasi Wireless
Pemancar penerima ini digunakan untuk menunjang komunikasi antara
PC dengan model helikopter. Pada perancangan ini digunakan modul RF (radio
frekuensi) modul RF yang digunakan adalah TLP 434A (pemancar) dan RLP
434A (penerima). Modul RF ini bekerja dalam satu frekuensi sehingga
dibutuhkan komponen mikrokontroller untuk switching data yang akan dikirim
dari model helikopter maupun dari PC. S ta r t
M o d e l h e lik o p te r a k tif
P C m e n g ir im s e t p o in t
M o d e l h e lik o p te r m e n g ir im d a ta
tin g g i k e P c
T u n d a 1 0 u s ?
M o d e l h e lik o p te r k ir im d a ta s u d u t k e
P C
T u n d a 1 0 u s ?
Y e s
Jarak pancar maksimum dari modul ini adalah 100 meter tanpa halangan
dan 30 meter didalam gedung. Pada perancangan ini dibutuhkan dua pasang
modul TLP 434A dan RLP 434A yang akan digunakan pada sisi komputer dan
pada sisi model helikopter. Berikut adalah rangkaian skematik dari pemancar
penerima yang akan digunakan:
Gambar 3-5 Rangkaian skematik dari pemancar penerima
Sedangkan pada sisi komputer dibutuhkan RS 232 yang disambung dengan
rangkaian pemancar penerima seperti pada gambar 3-5.
Gambar 3-6 Rangkaian skematik RS 232
C5 10uF U2 MAX232/SO 13 8 11 10 1 3 4 5 2 6 12 9 14 7 16 15 R1IN R2IN T1IN T2IN C+ C1-C2+ C2-V+ V-R1OUT R2OUT T1OUT T2OUT VC C GN D RX VCC C4 10uF TX C6 10uF C3 1uF J4 KOMPUTER 1 2 3 C2 1uF TX Q1 9014 VCC R1 470 RX DATA-RX K1
RELAY DPDT
Pada rangkaian pemancar penerima dibutuhkan relay untuk melakukan
pergantian transfer data dari komputer dengan model helikopter hal ini dilakukan
karena pemancar penerima ini bekerja dalam satu frekuensi. Diagram alir transfer
data dari sisi komputer dan sisi mikrokontroler dapat dilihat pada gambar 3-7 dan
3-8 sebagai berikut:
Gambar 3-7 Diagram alir wireless Gambar 3-8 Diagram alir wireless
dari sisi komputer dari sisi mikrokontroler
3.2.3 Perancangan Komunikasi pada PC
Komunikasi pada PC dilakukan dengan menekan tombol – tombol
tampilan yang sudah disediakan pada perancangan form yang sudah diprogram. Untuk melakukan komunikasi pada PC digunakan pemrograman Visual Basic.
Mulai
Data masuk dari komputer?
Aktifkan pemancar,matikan
penerima
Kirim data kepenerima
Kembalikan keposisi penerima
No
Yes Yes
Mulai
Data masuk dari mikro?
Aktifkan pemancar,matikan
penerima
Kirim data kepenerima
Kembalikan keposisi penerima
Agar input dapat dibaca oleh PC maka pada program Visual Basic dilakukan
inisialisasi port serial dengan perintah sebagai berikut:
MSComm1.Commport = 1
MSComm1.Settings = “9600,N,8,1”
Perintah MSComm1.CommPort = 1 menunjukkan pemilihan COM yang digunakan yaitu COM1. Sedangkan perintah MSComm1.Setting = “9600,N,8,1” nilai 9600 menunjukkan pengaturan baud rate menunjukkan bahwa setting port
serialtanpa paritas, 8 menunjukkan jumlah data adalah 8 bit, dan 1 menunjukkan
jumlah stop bit adalah 1. Untuk dapat mengirim atau menerima data maka digunakan perintah sebagai berikut:
MSComm1.PortOpen = True
Jika pengiriman dan penerimaan data sudah selesai dilakukan ( agar tidak terjadi
pertukaran data ) maka nilai true dapat diganti dengan false, dapat ditunjukkan sebagai berikut:
MSComm1.PortOpen = False
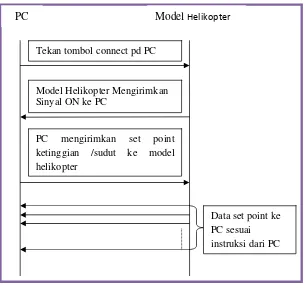
Proses komunikasi antara PC dengan model helikopter dapat dilihat pada
Gambar 3-9 Proses komunikasi
Proses komunikasi diatas dapat dijelaskan sebagai berikut:
• PC member sinyal ke model helikopter berupa A# setelah model
helikopter menerima sinyal A# model helikopter akan secara terus
menerus mengirim data pada saat itu.
• Model helikopter akan mengirim data ketinggian ke PC sampai tinggi
model helikopter sama dengan set point, data ini digunakan untuk menampilkan animasi ketinggian.
• Pemilihan gerakan untuk ketinggian dan sudut dapat dilakukan dengan
mengklik combo box pada pilihan ketinggian atau sudut.
PC ModelHelikopter
Tekan tombol connect pd PC
Model Helikopter Mengirimkan Sinyal ON ke PC
PC mengirimkan set point ketinggian /sudut ke model helikopter
• Jika pada PC diklik combo box ketinggian berarti akan dilakukan gerakan
ketinggian pada model helikopter dan pada animasi sesuai dengan set point yang diinginkan
• Jika pada PC diklik combo box sudut berarti akan dilakukan gerakan sudut pada model helikopter dan pada animasi sesuai dengan set point yang diinginkan.
• Model helikopter akan mendeteksi pengiriman set point dengan mengirimkan data ke PC sampai set point terpenuhi dan data dari perubahan ketinggian atau sudut digunakan untuk menampilkan
perubahan animasi.
3.3 Perancangan Sistem Monitoring pada PC
Sistem monitoring pada PC akan membahas perancangan bentuk – bentuk
form yang akan ditampilkan pada PC untuk melakukan proses komunikasi.
3.3.1 Perancangan Form
Pada perancangan form akan ditampilkan dua form pada komputer, yaitu form1, dan form2. Untuk masing – masing form akan diuraikan sebagai berikut:
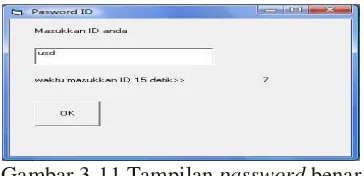
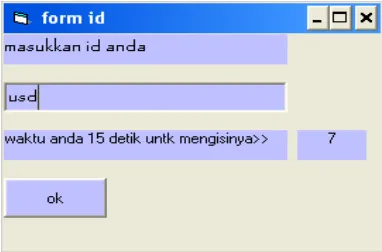
a. Perancangan Form Password
Pada perancangan form password akan dibuat kotak dialog dengan ketentuan pembatasan waktu saat password dimasukkan. Bila password yang dimasukkan benar, maka waktu yang telah ditentukan akan berhenti dan tombol
tidak ada input, maka waktu pembatasan akan terus berjalan hingga muncul pesan
error. Form password ini berfungsi untuk membatasi siapa saja yang dapat menggunakan program yang akan dijalankan. Untuk menjaga tingkat keamanan
setiap selesai menjalankan program, password dapat diubah setiap saat. Flowchart
untuk perancangan form password dapat dilihat pada gambar berikut:
Gambar 3-10 Flowchartform password
T adalah batas waktu yang sudah ditentukan
Tampilan untuk form password dapat dilihat pada gambar berikut:
Gambar 3-11 Tampilan password benar
Setelah password yang dimasukkan benar secara otomatis form control
untuk keadaan model helikopter akan aktif.
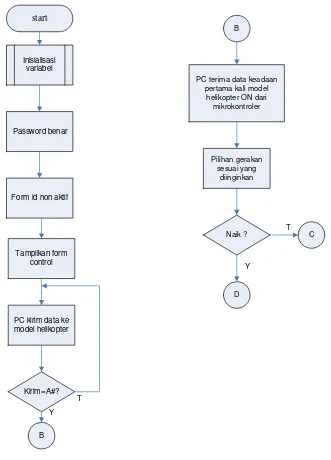
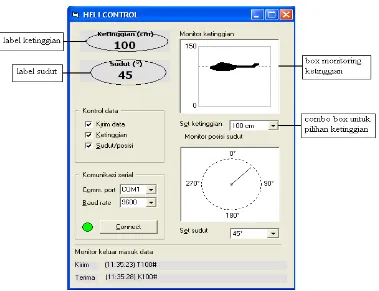
b. Perancangan FormControl Keadaan Pada Model Helikopter
Perancangan form control digunakan untuk melakukan komunikasi antara model helikopter dengan PC pada form ini juga terdapat pilihan gerakan yang akan dilakukan, data yang akan dikirim dan posisi yang terjadi saat itu.
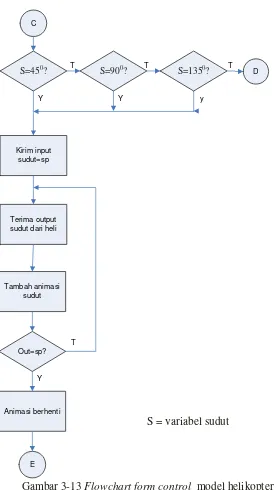
Flowchart untuk form control keadaan pada model helikopter dapat dilihat pada gambar 3-13 :
start
Inisialisasi variabel
Password benar
Form id non aktif
Tampilkan form control
PC kirim data ke model helikopter
Kirim=A#?
B Y
T
Pilihan gerakan sesuai yang
diinginkan
Naik ?
T
Y
C B
PC terima data keadaan pertama kali model
helikopter ON dari mikrokontroler
T = variabel ketinggian
Tambah ketinggian animasi
Out=sp?
Animasi berhenti
Pilihan gerakan T
Naik? T Sudut?
Y Y
T
Stop
C Kirim input
ketinggian =sp
Terima output ketinggian dari heli
T=50 cm? T T=100 cm? T T=120 cm?
D
y y
E y
T
Y
S = variabel sudut
Gambar 3-13 Flowchart form control model helikopter
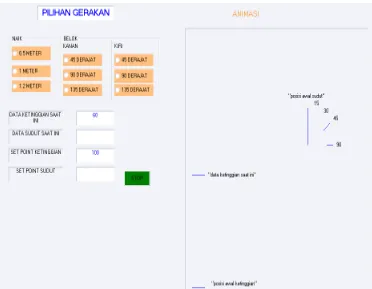
3.3.2 Pengolahan Data dan Animasi
Data yang diperoleh dari output mikrokontroler pada model helikopter
akan dijadikan animasi pada PC (data ini diperoleh dari Sevryadi dan Yustina).
Perancangan animasi dilakukan dengan menggunakan skala pada form, dengan menggunakan picture box. Pada perancangan form, diatur tinggi dan lebar dari
S=450? S=900?
Kirim input sudut=sp
Terima output sudut dari heli
Y Y
T T
C
Tambah animasi sudut
Out=sp?
Animasi berhenti
E
y
S=1350? T D
T
picture box. Untuk animasi ketinggian, jarak antara 1 titik dengan titik yang lain mewakili ketinggian dari model helikopter. Data dari model helikopter akan
digunakan untuk menampilkan animasi.
Untuk perancangan animasi sudut dengan menggunakan animasi berupa
garis dimana jika sudah ada data, garis tersebut akan bergerak melingkar.
Perubahan animasi akan terlihat setiap 150. Disini setengah lingkaran akan dibagi dengan enam penskalaan (setengah lingkaran terdiri dari enam juring). Karena
perubahan animasi per 150 maka untuk mencapai set point 450 akan terjadi tiga kali pergeseran. Tampilan rencana animasi gerakan model helikopter dapat dilihat
pada gambar 3-14
51
Setelah perancangan dan pembuatan sistem maka langkah selanjutnya yaitu melakukan pengujian terhadap sistem yang telah dibuat. Pengujian dilakukan untuk mengetahui apakah sistem yang dibangun dapat berjalan sesuai dengan yang diinginkan. Pengujian dan analisa yang dilakukan meliputi pengujian program monitoring, pengujian transfer data yang digunakan pada sistem, dan proses pengecekan set point