BAB II
LANDASAN TEORI
2.1. Sistem Kendali Lup[1]
Sistem kendali dapat dikatakan sebagai hubungan antara komponen yang membentuk sebuah konfigurasi sistem, yang akan menghasilkan tanggapan sistem yang diharapkan. Sistem kendali yang sederhana biasanya terdiri dari empat bagian yaitu masukan (input), pengendali (controller), kendalian (plant), keluaran (output). Sistem kendali lup merupakan suatu rangkaian simpul proses yang digunakan untuk mengendalikan suatu plant, agar diperoleh keluaran sesuai dengan yang diiinginkan. Sistem kendali lup dapat dibedakan menjadi dua, yaitu :
1. Sistem kendali lup terbuka (open loop control system) 2. Sistem kendali lup tertutup (close loop control system) 2.1.1 Sistem Kendali Lup Terbuka
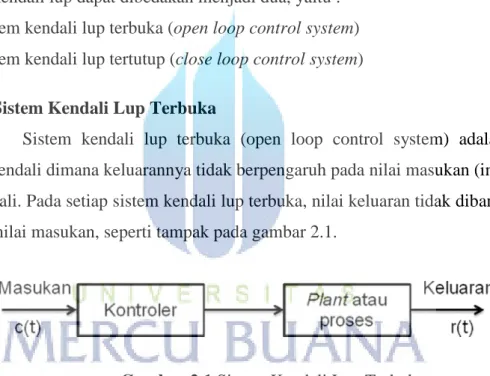
Sistem kendali lup terbuka (open loop control system) adalah suatu sistem kendali dimana keluarannya tidak berpengaruh pada nilai masukan (input) dan pengendali. Pada setiap sistem kendali lup terbuka, nilai keluaran tidak dibandingkan dengan nilai masukan, seperti tampak pada gambar 2.1.
Gambar 2.1 Sistem Kendali Lup Terbuka
Berdasarkan gambar di atas terlihat bahwa setiap masukan langsung diproses untuk menghasilkan nilai keluaran. Apabila terdapat gangguan, maka keluaran sistem r(t) tidak akan dapat dikendalikan untuk menjadi sama dengan masukan (referensi) yang diinginkan. Sistem kendali lup terbuka ini digunakan apabila hubungan antara masukan dan keluaran sudah diketahui dan tidak terdapat gangguan internal maupun eksternal.
2.1.2 Sistem Kendali Lup Tertutup
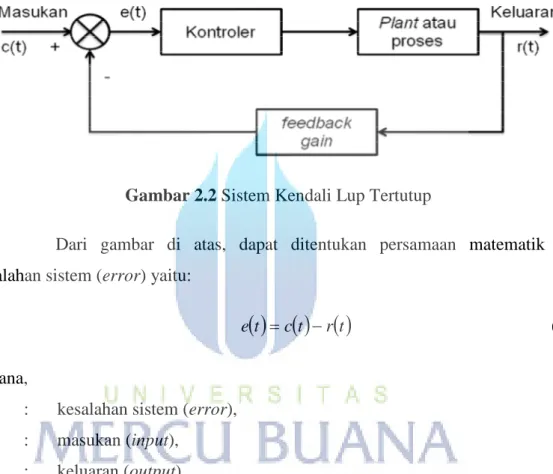
Sistem kontrol lup tertutup adalah suatu sistem kontrol yang sinyal keluarannya memiliki pengaruh langsung pada aksi pengontrolan. Sinyal keluaran akan dibandingkan dengan sinyal masukan yang membentuk selisih dan akan diumpankan ke kontroler untuk memperkecil kesalahan sehingga menghasilkan keluaran sistem yang sesuai atau mendekati harga yang diinginkan. Hubungan antara masukan-keluaran dari sistem kontrol lup tertutup diperlihatkan pada Gambar 2.2.
Gambar 2.2 Sistem Kendali Lup Tertutup
Dari gambar di atas, dapat ditentukan persamaan matematik dari kesalahan sistem (error) yaitu:
t c t r te (2.1)
dimana,
e(t) : kesalahan sistem (error), c(t) : masukan (input),
r(t) : keluaran (output).
2.2. Kalman Filter[3]
Kalman Filter merupakan sebuah algoritma matematika yang
mengoptimalkan penggunaan data tak jelas (imprecise data) pada sebuah sistem linier dengan kesalahan Gaussian yang secara terus menerus memperbaharui estimasi atau perkiraan terbaik dari keadaan (state) sistem tersebut. Kalman Filter mengestimasi keadaan proses pada satu waktu dan kemudian mengambil umpan balik dalam bentuk keluaran berderau.
Dalam Kalman Filter terdapat time update (persamaan prediksi) yang memprediksikan nilai vektor keadaan yang selanjutnya dipakai untuk umpan balik.
Measurement update atau observation update merupakan sebuah persamaan koreksi
yang digunakan untuk mengkoreksi vektor keadaan. Jadi dalam Kalman Filter terjadi proses prediksi dan koreksi. Kalman Filter akan memprediksi suatu ruang keadaan dan akan mengkoreksi apakah keluaran sistem telah sama seperti masukan yang diinginkan.
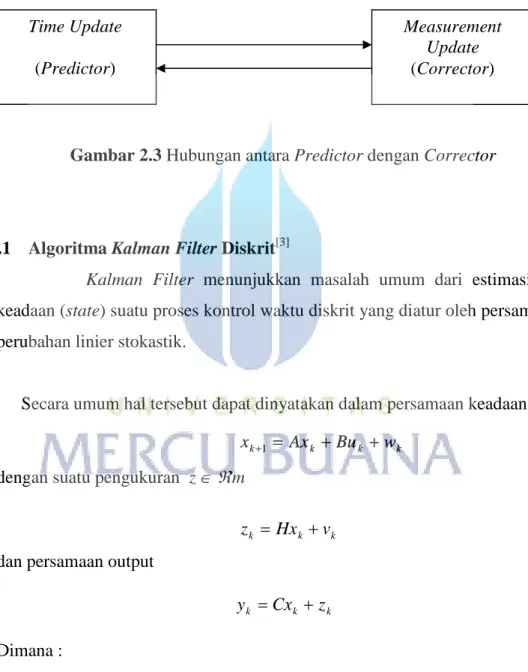
Gambar 2.3 Hubungan antara Predictor dengan Corrector
2.2.1 Algoritma Kalman Filter Diskrit[3]
Kalman Filter menunjukkan masalah umum dari estimasi sebuah
keadaan (state) suatu proses kontrol waktu diskrit yang diatur oleh persamaan dari perubahan linier stokastik.
Secara umum hal tersebut dapat dinyatakan dalam persamaan keadaan :
(2.2) dengan suatu pengukuran z m
(2.3) dan persamaan output
k k k Cx z y (2.4) Dimana : A : matriks keadaan (n x n),
B : matriks (n x 1) yang menghubungkan input kontrol ke sebuah keadaan,
Time Update (Predictor) Measurement Update (Corrector) k k k Hx v z k k k k Ax Bu w xk1 Axk Buk wk x 1
k
x : vektor keadaan proses (n x 1) saat waktu t ,k
k
w : vektor derau proses yang diasumsikan sebagai sebuah deret putih dengan struktur kovarian diketahui,
k
v : vektor derau pengukuran yang diasumsikan sebagai sebuah deret putih dengan struktur kovarian diketahui dan mempunyai korelasi silang nol dengan deret w ,k yk : vektor keluaran,
uk : vektor masukan,
k
z : vektor pengukuran saat waktu t ,k
k
H : matriks (m x n) yang memberikan hubungan ideal antara pengukuran dan vektor keadaan saat waktu t .k
Variabel acak wk dan vk menjelaskan derau proses dan pengukuran. Variabel – variabel tersebut diasumsikan berdiri sendiri antara yang satu dengan yang lainnya, white (putih) dan dengan distribusi kemungkinan normal.
Persamaan Kalman Filter terbagi menjadi dua bagian yaitu persamaan time
update dan persamaan measurement update. Persamaan – persamaan time update
bertanggung jawab atas rencana yang akan datang dari sebuah keadaan yang sekarang dan kovarian kesalahan mengestimasi untuk memperoleh estimasi a priori untuk langkah selanjutnya. Persamaan – persamaan measurement update digunakan sebagai umpan balik, menyatukan sebuah pengukuran baru ke dalam estimasi a priori untuk memperoleh sebuah estimasi a posteriori yang telah diperbaharui.
Q A AP Pk k T 1 1 1 ˆ ˆ k k k Ax Bu x
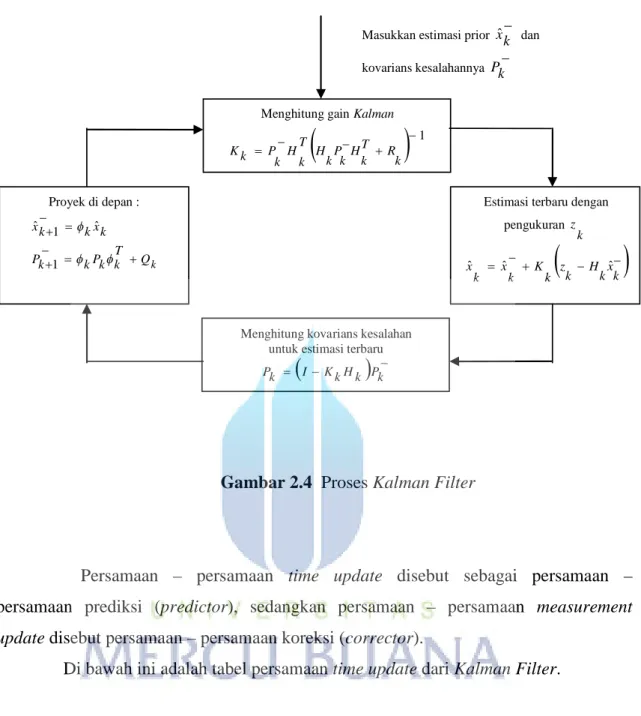
Gambar 2.4 di bawah ini menjelaskan proses Kalman Filter
Masukkan estimasi prior xˆk dan kovarians kesalahannya Pk
Menghitung gain Kalman
1 k R T k H k P k H T k H k P k KEstimasi terbaru dengan pengukuran k z
k x k H k z k K k x k xˆ ˆ ˆ Proyek di depan : k Q T k k P k k P k x k k x 1 ˆ 1 ˆMenghitung kovarians kesalahan untuk estimasi terbaru
I KkHk Pk k
P
Gambar 2.4 Proses Kalman Filter
Persamaan – persamaan time update disebut sebagai persamaan – persamaan prediksi (predictor), sedangkan persamaan – persamaan measurement
update disebut persamaan – persamaan koreksi (corrector).
Di bawah ini adalah tabel persamaan time update dari Kalman Filter.
Tabel 2.1 Persamaan – Persamaan Time Update Kalman Filter
Estimasi a priori
1 P H HP H R K k T T k k
k k k k k x K z Hx xˆ ˆ ˆ
k k k I K H P P Keterangan : kxˆ : estimasi a priori saat tk,
1 ˆk
x : estimasi a posteriori saat tk-1,
1
k
u : vektor masukan saat tk-1, A : matriks keadaan,
B : matriks yang menghubungkan input kontrol ke sebuah keadaan,
AT : matriks transpose A,
k
P : kovarian kesalahan estimasi a priori saat tk,
1
k
P : kovarian kesalahan estimasi a posteriori saat tk-1, Q : kovarian derau proses.
Di bawah ini adalah tabel dari persamaan measurement update dari Kalman
Filter.
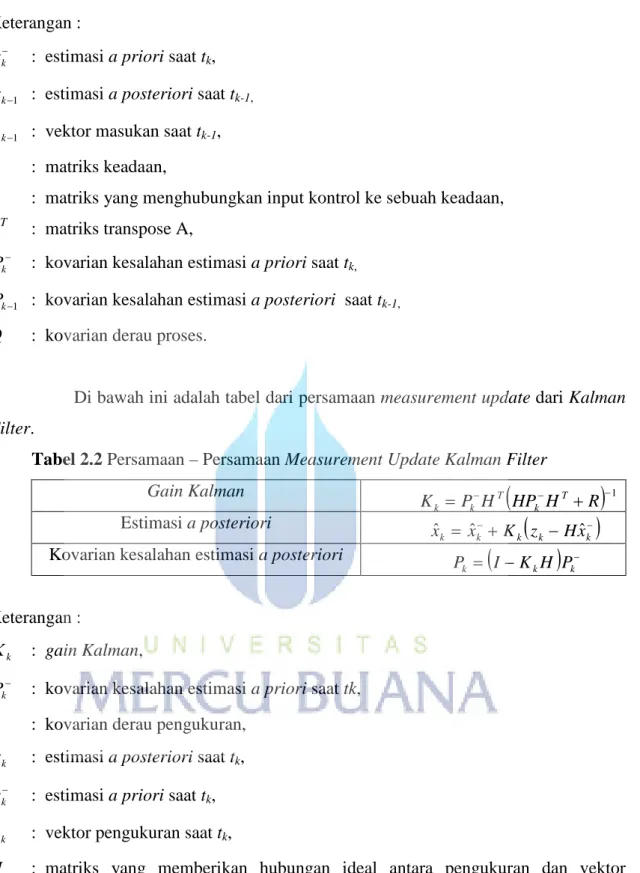
Tabel 2.2 Persamaan – Persamaan Measurement Update Kalman Filter
Gain Kalman
Estimasi a posteriori
Kovarian kesalahan estimasi a posteriori
Keterangan :
k
K : gain Kalman,
k
P : kovarian kesalahan estimasi a priori saat tk,
R : kovarian derau pengukuran,
k
xˆ : estimasi a posteriori saat tk,
k
xˆ : estimasi a priori saat tk,
k
z : vektor pengukuran saat tk,
H : matriks yang memberikan hubungan ideal antara pengukuran dan vektor keadaan saat waktu t ,k
HT : matriks transpose H,
k
P : kovarian kesalahan estimasi a posteriori saat tk, I : matriks identitas.
2.2.2 Kalman Filter Sebagai Estimator
Kalman Filter dapat berfungsi sebagai estimator. Maksudnya adalah Kalman Filter mampu melakukan estimasi ruang keadaan suatu plant yang dipengaruhi
oleh disturbansi.
Kalman Filter Estimator dapat dinyatakan sebagai :
n n
Ax
nn
Bu
n L
y
n Cx
nn
Du
n
xˆ 1 ˆ 1 v ˆ 1 (2.5)
n y n u M MD CM D CM I n n x MC I MC I C n n x n n y v 1 ˆ . ˆ ˆ (2.6)
nn xnn
M
y
n Cx
nn
Du
n
xˆ ˆ 1 v ˆ 1 (2.7) Keterangan :
nnxˆ : estimasi keadaan saat t = n,
nnyˆv : estimasi keluaran saat t = n,
n n
xˆ 1 : estimasi keadaan saat t = n+1 dari t = n,
1
ˆnn
x : estimasi keadaan saat t = n dari t = n-1,
n u : masukan,
n yv : keluaran, L : gain pengukuran, M : gain inovasi.Di bawah ini merupakan diagram blok Kalman Filter Estimator
KALMAN
FILTER
PLANT
y
w
υ
xˆ yˆy
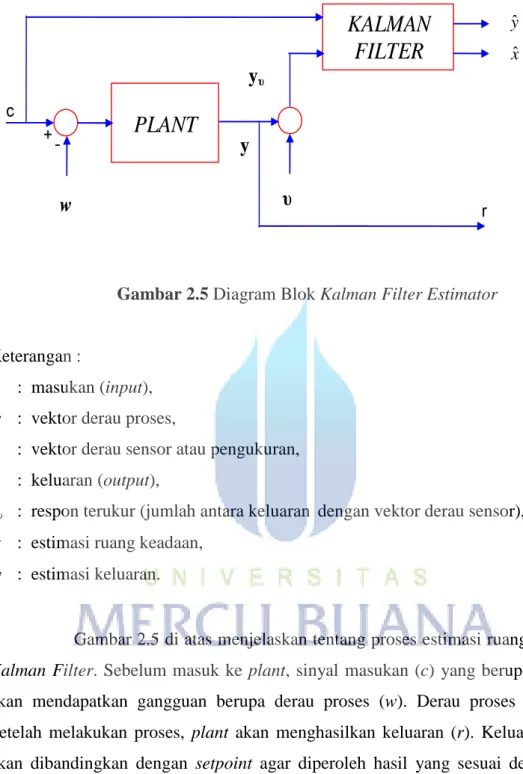
υGambar 2.5 Diagram Blok Kalman Filter Estimator
Keterangan :
c : masukan (input),
w : vektor derau proses,
υ : vektor derau sensor atau pengukuran, r : keluaran (output),
yυ : respon terukur (jumlah antara keluaran dengan vektor derau sensor),
xˆ : estimasi ruang keadaan,
yˆ : estimasi keluaran.
Gambar 2.5 di atas menjelaskan tentang proses estimasi ruang keadaan dari
Kalman Filter. Sebelum masuk ke plant, sinyal masukan (c) yang berupa sinyal kotak
akan mendapatkan gangguan berupa derau proses (w). Derau proses bersifat acak. Setelah melakukan proses, plant akan menghasilkan keluaran (r). Keluaran dari plant akan dibandingkan dengan setpoint agar diperoleh hasil yang sesuai dengan setpoint yang diinginkan.
Saat proses pengukuran terjadi gangguan berupa derau sensor (υ) yang bersifat acak. Derau tersebut bercampur dengan keluaran plant dan menghasilkan respon terukur (yυ). Respon terukur bersama dengan sinyal masukan akan dijadikan
Pada Kalman Filter terjadi proses prediksi dan koreksi. Kalman Filter akan memprediksi ruang keadaan yang diberikan oleh plant dan akan mengkoreksi apakah keluaran sistem telah sama seperti masukan yang diinginkan sesuai dengan itersi yang telah ditentukan. Keluaran dari Kalman Filter berupa estimasi ruang keadaan
xˆ danestimasi keluaran
yˆ . Hasil estimasi ruang keadaan akan dijadikan penalaan untukkontroler.
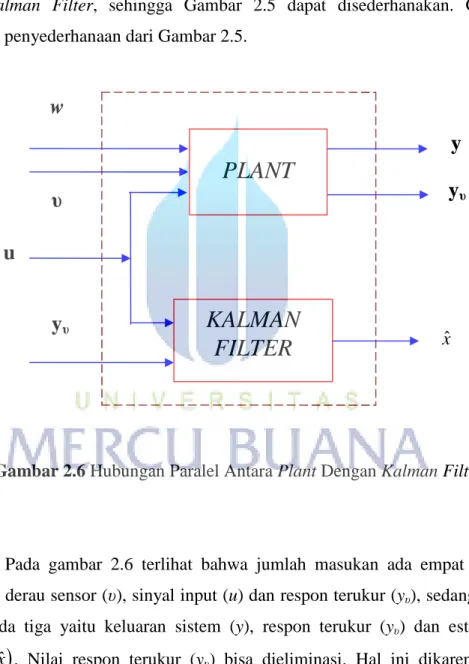
Untuk mencari besarnya estimasi ruang keadaan, plant akan diparalelkan dengan Kalman Filter, sehingga Gambar 2.5 dapat disederhanakan. Gambar 2.6 merupakan penyederhanaan dari Gambar 2.5.
Gambar 2.6 Hubungan Paralel Antara Plant Dengan Kalman Filter
Pada gambar 2.6 terlihat bahwa jumlah masukan ada empat yaitu derau proses (w), derau sensor (υ), sinyal input (u) dan respon terukur (yυ), sedangkan jumlah
keluaran ada tiga yaitu keluaran sistem (y), respon terukur (yυ) dan estimasi ruang
keadaan
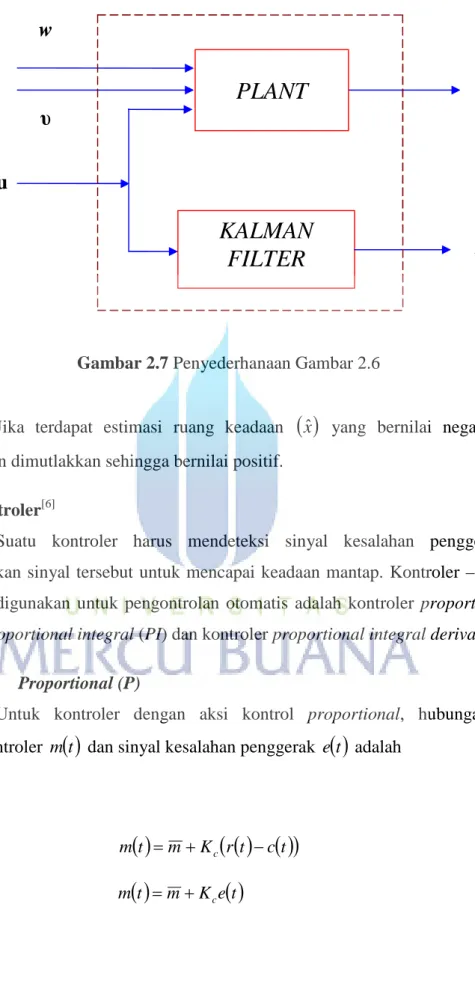
xˆ . Nilai respon terukur (yυ) bisa dieliminasi. Hal ini dikarenakan selain menjadi keluaran plant, respon terukur juga berfungsi sebagai masukan Kalman Filter. Sehingga Gambar 2.6 dapat disederhanakan seperti Gambar 2.7 di bawah ini :u
y
υKALMAN
FILTER
w
υ
y
υ xˆy
PLANT
Gambar 2.7 Penyederhanaan Gambar 2.6
Jika terdapat estimasi ruang keadaan
xˆ yang bernilai negatif, maka nilainya akan dimutlakkan sehingga bernilai positif.2.3. Kontroler[6]
Suatu kontroler harus mendeteksi sinyal kesalahan penggerak dan menghilangkan sinyal tersebut untuk mencapai keadaan mantap. Kontroler – kontroler yang biasa digunakan untuk pengontrolan otomatis adalah kontroler proportional (P), kontroler proportional integral (PI) dan kontroler proportional integral derivatif (PID).
2.3.1 Proportional (P)
Untuk kontroler dengan aksi kontrol proportional, hubungan antara keluaran kontroler m
t dan sinyal kesalahan penggerak e
t adalah(2.8)
u
KALMAN
FILTER
w
υ
xˆy
PLANT
t m K e
t m c
t m K
r
t c t
m c dimana :
t e : kesalahan (error),
t r : set point,
tc : variabel proses yang akan dikontrol,
m : nilai bias kontrol,
Nilai bias adalah nilai keluaran yang tetap pada kontrol dalam keadaan error bernilai nol,
c
K : gain control.
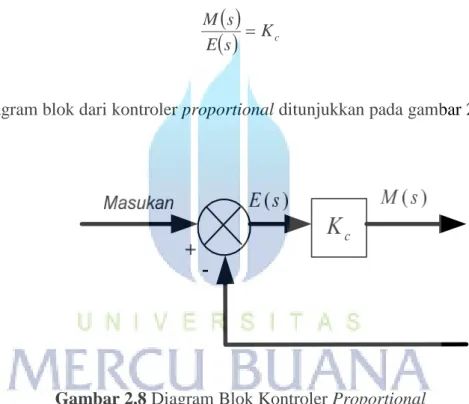
Bentuk transformasi Laplace kontrol proportional :
Kc s E s M Bentuk diagram blok dari kontroler proportional ditunjukkan pada gambar 2.8 di bawah ini.
Gambar 2.8 Diagram Blok Kontroler Proportional
Pada kontroler proportional hanya ada satu parameter yang ditala yaitu gain kontrol (K ). Kelemahan kontrol proportional adalah pada kontrol proportional terjadic
offset pada keadaan steady state. Yang dimaksud offset disini adalah bila nilai kesalahan
t2.3.2 Proportional Integral (PI)
Pada kontrol proportional, untuk menghilangkan offset yaitu kesalahan
t r t cte tidak dapat mencapai nilai nol pada saat steady state perlu ditambahkan komponen pada kontrol tersebut yaitu integral time atau aksi reset time, sehingga kontrol proportional menjadi Propotional Integral (PI). Pada kontrol PI ini ada dua parameter yang perlu ditala yaitu K danc T .i
Aksi kontrol dari kontroler Proportional Integral didefinisikan dengan persamaan berikut : (2.9) dimana m = nilai bias,
t e = error, c K = gain kontrol, i T = integral time.Bentuk transformasi Laplace kontrol Proportional Integral :
(2.10)
Gambar 2.9(a) menunjukkan diagram blok kontroler Proportional
Integral. Jika sinyal kesalahan penggerak e
t adalah fungsi tangga satuan (unit step), seperti ditunjukan pada Gambar 2.9(b), maka keluaran kontroler m
t menjadi seperti yang ditunjukan pada Gambar 2.9 (c).2.3.3 Proportional Integral Derivative (PID)
Komponen kontrol Proportional Integral (PI) ditambahkan dengan aksi kontrol derivative akan menjadi kontrol Proportional Integral Derivative (PID).
Derivative berfungsi untuk mengantisipasi kesalahan yang mendahului proses. Pada
kontrol PID ini ada tiga parameter yang perlu ditala yaitu K ,c T , dani T .d
t
i c c e t dt T K t e K m t m 0
s T K s E s M i c . 1 1(a)
(b)
(c) Gambar 2.9
(a) Diagram Blok Kontroler Proportional Integral (b) Diagram Masukan Tangga Satuan (Unit Step)
(c) Keluaran Kontroler Proportional Integral.
0 Kp 2 i T Kp t Aksi kontrol PI (Hanya proportional)
t m
t e t 0 1 Unit stepPersamaan kontroler dengan aksi gabungan PID ini diberikan oleh :
(2.11) dalam transformasi Laplace
(2.12) dimana, m : nilai bias,
t e : kesalahan (error), c K : gain kontrol, d T : derivative time, i T : integral time.Blok kontroler Proportional Integral Derivative ditunjukan pada Gambar 2.10(a). Jika
te adalah fungsi ramp satuan (unit ramp) seperti yang ditunjukan pada Gambar 2.10(b), maka keluaran kontroler m
t menjadi seperti yang ditunjukan pada Gambar 2.10(c).2.3.4 Penalaan Parameter pada PID
Penalaan parameter-parameter bertujuan untuk mendapatkan suatu sistem kendali yang baik. Penalaan ini hanya dilakukan untuk pengendali P, PI, dan PID. Parameter-parameter tersebut adalah Kc, Ti, dan Td.
Parameter-parameter tersebut di dapatkan dengan metode Routh’s test dan dengan metode quarter decay ratio response.
e
tdt T K dt t de T K t e K m t m t i c d c c
0
s T s T K s E s M i d c . 1 . 1(a)
(b)
(c) Gambar 2.10
(a) Diagram Blok Kontroler Proportional Integral Derivative (b) Diagram Masukan Ramp Satuan (Unit Ramp) (c) Keluaran Kontroler Proportional Integral Derivative
2.3.4.1 Metode Routh’s Test
Dengan metode Routh’s test didapatkan KC atau ultimate gain, yaitu gain
maksimum pada umpan balik lup kendali yang mengakibatkan sistem kendali PID tidak stabil.
Routh’s test merupakan prosedur untuk menentukan kondisi stabilitas sistem
persamaan polinominal yang mempunyai konstanta positif. Jika kestabilan dari sistem yang dianalisa tidak memerlukan akar kuadrat persamaan dari sistem dan mempunyai bagian yang positif, sehingga Routh’s test merupakan cara yang tepat untuk menentukan kestabilan.
Metode Routh’s test sesuai untuk menyelesaikan masalah dalam menentukan batas-batas sebuah parameter lup, terutama kontrol gain yang stabil.
Untuk melaksanakan metode Routh’s test ditentukan persamaan karakteristik lup, yaitu : 0 ... ) ( ) ( ) ( 1 1 0 1 1 s a s a a s a s G s G s H n n n n V C (2.13)
dimana an, an-1, …., a1, a0 merupakan koefisien polinominal, menyatakan kebanyakan
akar positif bagian real.
Untuk melakukan test pertama, harus dipersiapkan array sebagai berikut :
Baris 1 an an-2 an-4 ……. a1 0 Baris 2 an-1 an-3 an-5 ……. a0 0 Baris 3 b1 b2 b3 ……. 0 0 Baris 4 c1 c2 c3 ……. 0 0 …….. ……. ……… ……… . ……. …… ……. Baris n d1 d2 0 ……… 0 0 Baris n+1 e1 0 0 ……… 0 0
Dimana baris ke tiga sampai baris n +1 dihitung dengan : 1 3 2 1 1 n n n n n a a a a a b (2.14) 1 5 4 1 2 n n n n n a a a a a b 1 2 1 3 1 1 b b a a b c n n 1 3 1 5 1 2 b b a a b c n n
dan seterusnya. Proses diteruskan sampai pada suatu baris baru semuanya bernilai nol.
2.3.4.2 Metode Substitusi Langsung
Dari persamaan (2.13) yang merupakan persamaan karakteristik di substitusikan s = ui, dan kontrol proportional saja. Hasil substitusi akan diperoleh ultimate gain (KC).
Dariuakan diperoleh perioda ultimate yaitu :
u U T 2 (2.15)
2.3.4.3 Metode Quarter Decay Ratio Response
Metode ini dikenal sebagai metode lup tertutup ( closed loop ) atau on line
tuning, diilhami oleh Zieger dan Nichols tahun 1942. Penalaan parameter PID
dilakukan dengan mencari ultimate gain ( KCU) dan periodanya ( TU).
Untuk menala parameter PID dengan metode ini dilakukan langkah – langkah sebagai berikut :
1. menentukan karakteristik atau jenis lup kendali.
2. melakukan pendekatan dari parameter kendali yang ditala yang menghasilkan respons untuk jenis lup kendali pada langkah pertama.
Pada metode ini karakteristik dari proses diwakilkan dengan adanya ultimate
Prosedur untuk metode quarter decay ratio adalah :
1. set waktu kendali integral dan derivative pada posisi off, sehingga pengendali hanya
proportional. Pada beberapa metode integral time tidak dimatikan, tetapi diatur
pada nilai maksimum.
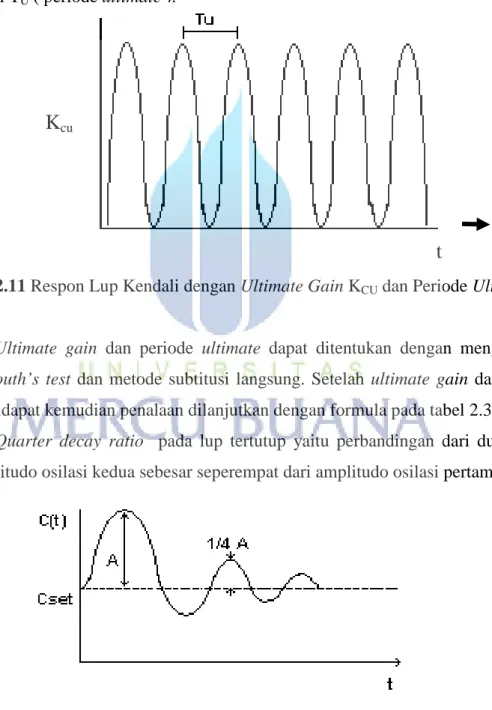
2. naikan nilai gain proportional (atau kurangi nilai proportional band) sehingga c(t) berosilasi dengan amplitudo konstan, catat gain yang menghasilkan osilasi dengan amplitudo konstan sebagai KCU( Ultimate gain ).
3. dari hasil rekorder variabel yang dikendalikan diukur periode osilasi dan dinyatakan sebagai TU( periode ultimate ).
K
cut
Gambar 2.11 Respon Lup Kendali dengan Ultimate Gain KCUdan Periode Ultimate TU
Ultimate gain dan periode ultimate dapat ditentukan dengan menggunakan
metode Routh’s test dan metode subtitusi langsung. Setelah ultimate gain dan periode
ultimate didapat kemudian penalaan dilanjutkan dengan formula pada tabel 2.3.
Quarter decay ratio pada lup tertutup yaitu perbandingan dari dua osilasi,
yaitu amplitudo osilasi kedua sebesar seperempat dari amplitudo osilasi pertama
Gambar 2.13 Respon Quarter Decay Ratio terhadap Setpoint
Gambar 2.12 mengilustrasikan respon quarter decay ratio terhadap disturbance dan setpoint, parameter kendali diatur sehingga terjadi osilasi pada Gambar 2.13. Keuntungan quarter decay ratio dapat mencegah deviasi yang besar dari setpoint tanpa terlalu osilasi.
Tabel 2.3 Quarter Decay Tuning Formula
Tipe kendali Proportional Gain,
KC Integral Time, Ti Derivative Time, Td Proportional P Kcu/2 - -Proportional integral PI Kcu/2,2 Tu/1,2 -Proportional integral derivative PID Kcu/1,7 Tu/2 Tu/8