3.1. Perancangan Alat 3.1.1. Blok Diagram
Blok kontrol sistem penjejak matahari 4 arah adalah sebagai berikut :
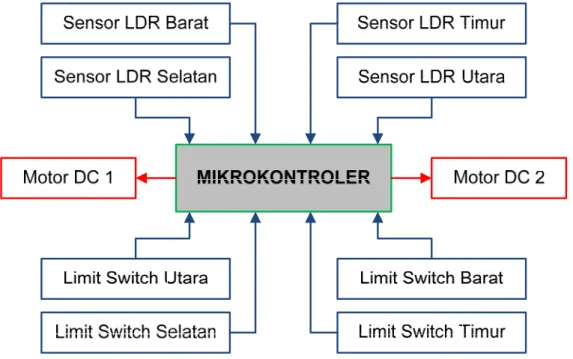
Gambar 3.1 Blok Perancangan Sistem Kontrol
Sistem kontrol dari penjejak matahari 4 arah yang di bangun adalah dengan menggunakan sistem kontrol open loop yang dapat terlihat dari blok kontrol sistem diatas. Dimana input sistem berupa sensor LDR dan limit switch kemudian input ini diolah oleh mikrokontroler sesuai dengan program untuk menghasilkan output berupa gerakan motor DC tanpa adanya umpan balik kepada mikrokontroler.
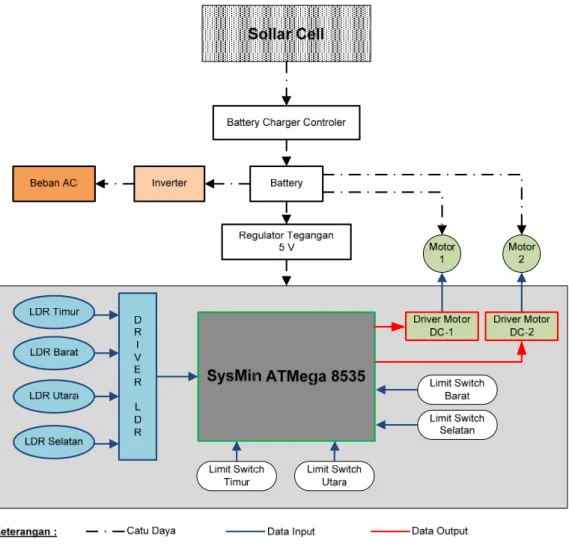
Gambar 3.2 Blok Perancangan Sistem Solar Cell Penjejak Matahari 4 Arah
3.1.2. Prinsip Kerja Rangkaian
Secara umum, prinsip kerja sistem solar cell penjejak matahari 4 arah adalah dengan mendeteksi arah datangnya sinar matahari oleh LDR yang kemudian disampaikan menjadi masukan kepada mikrokontroller. Dari masukan tersebut mikrokontroller akan menggerakan motor DC untuk menggerakan posisi solar cell agar tegak lurus dengan arah datangnya sinar matahari.
1. LDR berfungsi mendeteksi arah datangnya sinar matahari 2. Limit switch berfungsi membatasi gerakan solar cell
3. Motor DC berfungsi menggerakan solar cell agar tegak lurus dengan arah datangnya sinar matahari
4. Mikrokontroller ATmega 8535 berfungsi sebagai kontroler keseluruhan sistem.
5. Semua kebutuhan catu daya berasal dari baterai yang berupa aki kering. Untuk menyuplai ke kebutuhan daya untuk motor DC 1 dan motor DC 2, catu daya diambil langsung dari baterai. Sedangkan untuk kebutuhan catu daya blok rangkaian lainnya diambil dari baterai dengan melalui regulator tegangan terlebih dahulu untuk mendapatkan tegangan 5 VDC.
3.1.3. Logika Kerja Rangkaian
Logika kerja untuk pembuatan kontrol sistem solar cell penjejak matahari 4 arah adalah memastikan keempat sensor LDR menerima cahaya matahari yang diartikan bahwa posisi solar cell telah berada tegak lurus dengan arah datangnya sinar matahari dengan menggerakan motor DC 1 dan motor DC 2 .
1. Motor DC 1 akan menggerakkan panel solar cell dari Timur ke Barat. Motor DC 1 akan berhenti apabila kedua sensor LDR Timur dan sensor LDR Barat terkena matahari. Apabila sensor LDR Timur dan sensor LDR Barat tidak mendeteksi matahari, maka panel sel surya akan menyentuh limit switch Barat dan mikrokontroler akan memberikan keluaran pada motor DC 1 untuk berbalik putaran ke arah Timur. Apabila dalam pergerakan menuju arah Timur kedua sensor LDR tersebut tidak mendeteksi matahari, maka panel solar cell akan menyentuh limit switch Timur dan mikrokontroler akan memerintahkan motor DC 1 untuk berbalik putaran menuju kearah barat. 2. Motor DC 2 akan bekerja bila motor DC 1 telah berhenti karena kedua sensor
LDR Timur dan sensor LDR Barat terkena matahari.
3. Motor DC 2 akan menggerakkan panel solar cell dari Utara ke Selatan. Motor DC 2 akan berhenti apabila kedua sensor LDR Utara dan sensor LDR Selatan terkena matahari. Apabila sensor LDR Utara dan sensor LDR Selatan tidak mendeteksi matahari, maka panel solar cell akan menyentuh limit switch Utara dan mikrokontroler akan memerintahkan motor DC 2 untuk berbalik putaran ke arah Selatan. Apabila dalam pergerakan menuju arah Selatan kedua sensor LDR tersebut tidak mendeteksi matahari, maka panel
sel surya akan menyentuh limit switch Selatan dan mikrokontroler akan memberikan keluaran pada motor DC 2 untuk berbalik putaran.
3.1.4. Cara Kerja Tiap Rangkaian 1. Rangkaian Driver LDR
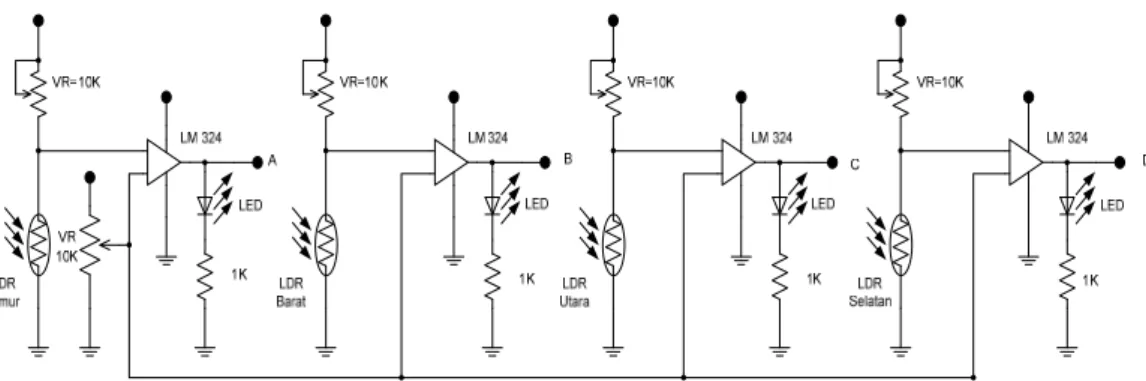
Driver LDR dipergunakan untuk menterjemahkan intensitas cahaya yang diterima oleh LDR menjadi pulsa digital logika 0 atau 1 (0 atau 5 Volt) untuk menjadi masukan ke mikrokontroller.
Output logika dari driver LDR memanfaatkan fungsi Op-Amp sebagai pembanding. Tegangan di kaki inverting Op-Amp yang berasal dari rangkaian pembagi tegangan antara VR dan LDR akan dibandingkan dengan tegangan dari kaki non inverting.
Jika LDR dalam keadaan tidak terkena cahaya, LDR akan mempunyai resistansi yang tinggi sehingga sesuai prinsip pembagi tegangan tegangan yang masuk ke input inverting dari Amp akan tinggi. Sehingga output Op-amp akan sama dengan - Vcc sebesar 0 Volt.
Jika LDR dalam keadaan terkena cahaya, LDR akan mempunyai resistansi yang rendah sehingga sesuai prinsip pembagi tegangan tegangan yang masuk ke input inverting dari Op-Amp akan rendah. Sehingga output Op-amp akan sama dengan Vcc sebesar 5 Volt.
Gambar 3.3 Rangkaian Driver LDR
2. Driver Motor DC
Untuk menggerakkan motor DC diperlukan arus yang cukup besar, sedangkan output mikrokontroler tidak memiliki arus yang cukup untuk
menggerakkannya. Untuk itu diperlukan sebuah driver penggerak motor DC yang berupa penguat arus yang menguatkan tegangan kontrol dari mikrokontroler.
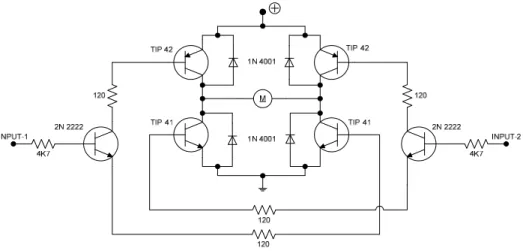
Rangkaian driver motor DC menggunakan rangkaian H-Bridge. Pada rangkaian driver digunakan transistor PNP dan NPN dengan seri TIP41 dan TIP42 dan untuk buffer digunakan transistor tipe 2N2222. Transistor ini digunakan untuk mengaktifkan transistor driver. Digunakan tipe NPN agar output dari mikrokontroler dapat membias transistor tersebut.
Prinsip kerja dari rangkaian ini adalah ketika transistor T1 diberi bias positif atau logika 1 dari mikrokontroler dan T2 diberi logika 0 maka transistor akan mengalirkan arus dari kolektor menuju emitor, sehingga transistor Q5 dan Q4 akan aktif. Dengan demikian arus mengalir dari VCC melewati Q5, melewati motor dan menuju ground melewati Q4. Sehingga motor dapat berputar. Begitu juga sebaliknya ketika transistor T2 diberi bias positif atau logika 1 dari mikrokontroler dan T1 diberi logika 0 maka transistor akan mengalirkan arus dari kolektor menuju emitor sehingga transistor Q6 dan Q3 akan aktif. Dengan demikian arus mengalir dari vcc melewati Q6, melewati motor dan menuju ground melewati Q3. Sehingga motor berputar dengan arah sebaliknya.
Jika T1 dan T2 diberi logika 0 maka semua transitor tidak aktif sehingga motor diam. Logika yang tidak diperbolehkan adalah jika T1 dan T2 diberi logika 1 maka transistor akan aktif semua, sehingga transistor driver akan menjadi panas karena transitor yang satu dengan yang lain menjadi saling membebani.
Gambar 3.4 Rangkaian Driver Motor DC
3. Rangkaian Mikrokontroler ATMega 8535
Rangkaian mikrokontroler ATmega8535 merupakan rangkaian yang bekerja jika pada memori flashnya diberi program aplikasi sesuai ketentuan yang ada, atau juga dapat dihubungkan langsung ke personal komputer dengan sistem ISP yang dimiliki oleh mikrokontroler ATmega8535. Sistem minimum rangkaian mikrokontroler ATmega8535 dapat dilihat pada gambar berikut:
Pada gambar rangkaian diatas terdapat dua kapasitor yang terhubung paralel yang memiliki nilai 33 pF dan sebuah kristal 4 MHz. rangkaian ini berfungsi sebagai pembangkit osilator untuk mikrokontroler ATmega8535. Reset terdapat pada pin 9 yang berfungsi untuk memberikan kondisi mikrokontroler menjadi kondisi awal secara manual jika tombol reset ditekan.
Tegangan yang digunakan pada mikrokontroller ATmega8535 adalah sebesar 5 volt, yang dimasukan ke penyemat 10 sebagai penyemat Vcc. LED berfungsi sebagai lampu indikator yang dihubungkan ke penyemat Vcc.
Pemberian program pada mikrokontroler ATmega8535 dapat dilakukan dengan mode paralel maupun serial. Pada aplikasi ini penulis menggunakan mode serial yaitu pemberian program melalui ISP yang kemudian masuk pada penyemat MOSI, MISO dan SCK sebagai masukan ke flash memory.
Port A memiliki fungsi ganda yaitu selain sebagai inputan atau outputan untuk aplikasi, juga berfungsi sebagai ADC yaitu untuk merubah sinyal analog menjadi sinyal digital. Penyemat 30 merupakan penyemat yang digunakan untuk tegangan yang mensupplay ADC dan penyamat 32 merupakan penyemat yang digunakan sebagai tegangan referensi pada ADC.
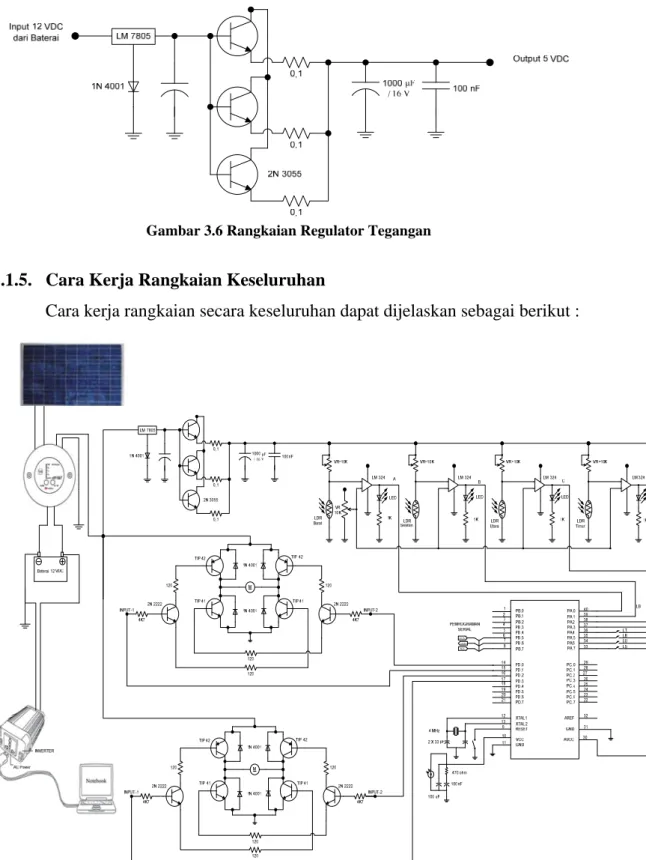
4. Rangkaian Regulator Tegangan 5 V
Rangkaian regulator tegangan ini dipergunakan untuk meregulasi / menurunkan tegangan yang berasal dari aki sebesar 12 V menjadi 5V. Tegangan 5V ini dipergunakan untuk keperluan catu daya rangkaian sistem minimum mikrokontroler ATMega 8535 dan driver LDR.
Tegangan masukan 12V DC dari aki dihubungkan dengan rangkaian regulator, tegangan 12V akan diturunkan dengan menggunakan IC LM 7805. Keluaran IC terhubung dengan kapasitor yang berfungsi sebagai penyimpan muatan, selanjutnya terhubung dengan transistor sebagai penguat arus. Keluaran dari transistor tersebut terhubung dengan kapasitor yang berfungsi sebagai penyimpan muatan dan filter.
Gambar 3.6 Rangkaian Regulator Tegangan
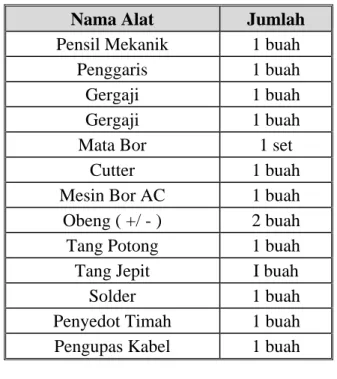
3.1.5. Cara Kerja Rangkaian Keseluruhan
Cara kerja rangkaian secara keseluruhan dapat dijelaskan sebagai berikut :
Saat rangkaian mendapat tegangan dari catu daya, mikrokontroler akan melakukan scanning dari arah Timur ke Barat dengan menggerakkan motor DC 1 berdasarkan masukan dari sensor LDR (Light Dependent Resistor). Dengan bantuan motor DC, sensor LDR melakukan scanning untuk mendeteksi arah sinar matahari. Selama sensor LDR tidak terkena matahari, maka sensor akan mengeluarkan logik 0, sehingga akan mengirimkan sinyal menuju mikrokontroler untuk menggerakkan motor DC 1 sebagai prioritas untuk arah Timur dan Barat. Pada saat sensor Timur dan sensor Barat telah terkena sinar matahari, sensor LDR mengeluarkan logik 1, sehingga mikrokontroler akan menghentikan putaran motor DC 1. Apabila kedua sensor Timur dan sensor Barat tidak mendeteksi matahari, maka panel sel surya akan menyentuh limit switch Barat dan mikrokontroler akan memberikan keluaran pada motor DC 1 untuk berbalik putaran ke Timur. Bila kedua sensor tersebut tidak mendeteksi matahari, maka panel sel surya akan menyentuh limit switch Timur dan mikrokontroler akan memberikan keluaran pada motor DC 1 untuk berbalik putaran.
Motor DC 2 akan bekerja apabila kedua sensor Timur dan sensor Barat telah mendeteksi matahari dan mikrokontroler akan menghentikan gerakan motor DC 1. Pada saat salah satu sensor Utara atau sensor Selatan dalam keadaan tidak terkena cahaya, maka sensor tersebut akan mengeluarkan logik 0 sebagai masukan mikrokontroler, sehingga mikrokontroler akan menggerakkan motor DC 2 untuk bergerak dari arah Utara ke arah Selatan sampai seluruh sensor terkena matahari.
Apabila salah satu dari empat sensor dalam keadaan tidak terkena cahaya (mengeluarkan logik 0), maka logik ini sebagai inputan ke mikrokontroler yang kemudian diolah sesuai algoritma program untuk menggerakkan motor DC 1 sebagai prioritas pertama dengan dilanjutkan motor DC 2 sebagai prioritas kedua.
Setelah keempat sensor mendeteksi arah sinar matahari, maka kedua motor DC akan berhenti. Pada kodisi ini panel sel surya fokus terhadap arah sinar matahari, sehingga panel sel surya akan menyerap sinar matahari dengan optimal dan menghasilkan beda tegangan yang optimal pula pada kedua kutubnya. Panel solar cell yang telah terhubung dengan aki melalui charger controller, akan mengisi aki. Disamping digunakan untuk catu daya rangkaian, aki tersebut juga
dihubungkan dengan rangkaian inverter untuk mengubah tegangan 12V DC dari aki menjadi tegangan 220V AC, yang dapat dihubungkan dengan beban yang membutuhkan tegangan AC (misal lampu dan kipas angin).
3.2. Pembuatan Alat
Dalam pembuatan alat untuk sistem solar cell penjejak matahari dibagi menjadi pembuatan bagian mekanik, elektronik dan pemrogramannya.
Alat dan bahan untuk pembuatan solar cell penjejak matahari 4 arah antara lain :
Tabel 3.1 Daftar Alat
Nama Alat Jumlah
Pensil Mekanik 1 buah
Penggaris 1 buah
Gergaji 1 buah
Gergaji 1 buah
Mata Bor 1 set
Cutter 1 buah
Mesin Bor AC 1 buah Obeng ( +/ - ) 2 buah Tang Potong 1 buah Tang Jepit I buah
Solder 1 buah
Penyedot Timah 1 buah Pengupas Kabel 1 buah
Tabel 3.2 Daftar Bahan
Nama Bahan Jumlah
PCB Berlubang 8 lembar
Stiker 1 m2
Papan Kayu besar 1 buah
Alumunium 2m
Plat Besi U 1m
Plat Besi L 2,5m
Plat Besi 1,5m
Tinner & Cat 1 liter
Ampelas 1 buah
Timah solder 5 meter
Mur dan baut 20 buah
Kabel Pelangi 3m
Kabel NYAF 1 m
Lem Bakar 3 bayang
Lem Hi-Qi 1 buah
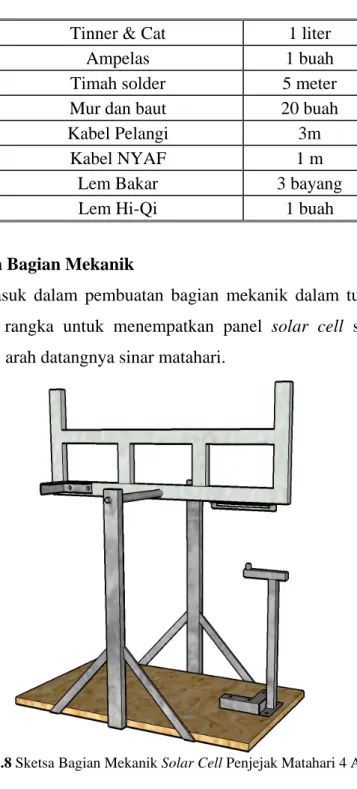
3.2.1. Pembuatan Bagian Mekanik
Yang termasuk dalam pembuatan bagian mekanik dalam tugas akhir ini adalah pembuatan rangka untuk menempatkan panel solar cell sehingga bisa bergerak mengikuti arah datangnya sinar matahari.
Gambar 3.8 Sketsa Bagian Mekanik Solar Cell Penjejak Matahari 4 Arah
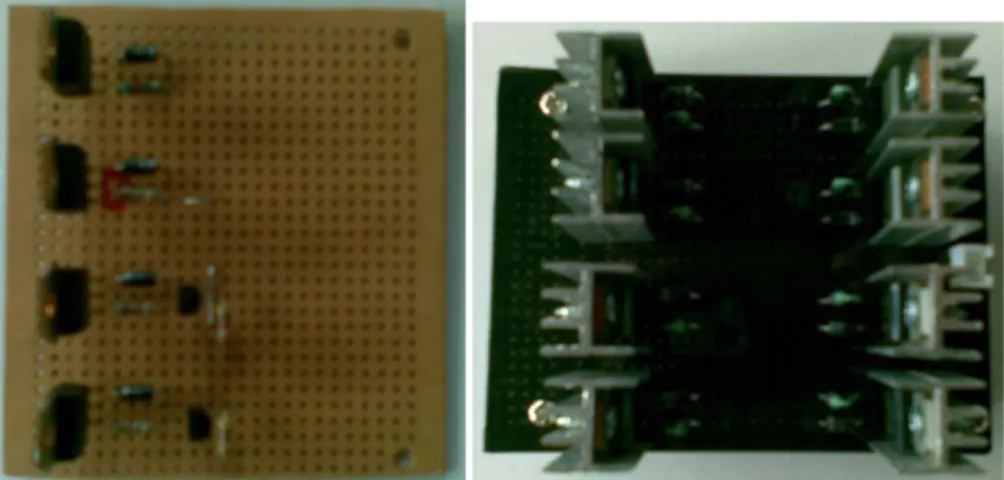
3.2.2. Pembuatan Bagian Elektronik
Bagian elektronik dibuat dengan menggunakan PCB berlubang dengan berdasar gambar rangkaian yang telah digambarkan di cara kerja rangkaian. Dalam pembuatan bagian penulis mengunakan PCB berlubang untuk mempermudah pembuatan rangkaian daripada membuat PCB cetak. Untuk
memperapi penampilan dari PCB berlubang, ditempelkan sticker / scotlet dibagian atas PCB berlubang sehingga nampak seperti PCB cetak.
Gambar 3.9 Pembuatan Bagian Elektronik Dengan PCB Berlubang
Beberapa hal yang perlu diperhatikan dalam pembuatan bagian elektronik adalah : 1. Sebelum komponen dipasang harus diperiksa terlebih dahulu keadaan dari
setiap komponen yang akan dipasang apakah baik atau rusak. Komponen yang rusak harus diganti untuk menghindari rangkaian dari kegagalan sedini mungkin
2. Penyolderan sebaiknya dilakukan dengan solder berdaya sedang ( sekitar 30 Watt) untuk menghindari panas yang berlebihan
3. Untuk menghindari terjadinya hubung singkat terutama pada rangkaian yang menggunakan soket seperti rangkaian terintegrasi ( IC ), sebaiknya dilakukan pengecekan dahulu terhadap hubungan antara jalur – jalurnya.
3.2.3. Pembuatan Program Mikrokontroler
Pembuatan program untuk sistem solar cell penjejak matahari 4 arah ditempuh dengan langkah-langkah dan cara-cara sebagai berikut :
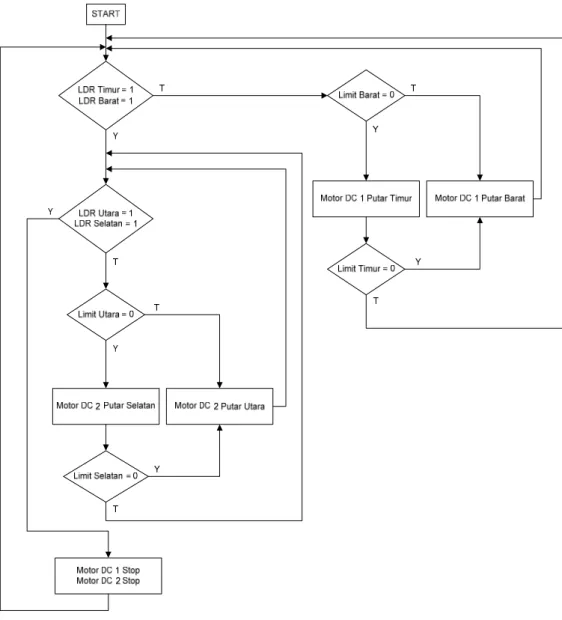
1. Membuat diagram alir (flow chart).
Pembuatan perangkat lunak diawali dari penyusunan diagram alir. Pembuatan diagram alir tersebut sangat membantu dalam penyusunan kode program. Diagram alir program beserta algoritmanya digunakan untuk menyelesaikan masalah dalam penyusunan program.
Dalam menyusun diagram alir, masalah pemrograman di bagi-bagi menjadi kotak-kotak proses yang sederhana dan efisien. Sehingga diagram alir yang dibuat nantinya akan membantu dalam pencarian kesalahan pemrograman. Dalam menyusun diagram alir diusahakan dapat membagi proses yang kompleks menjadi sub program yang lebih kecil, sehingga pencarian kesalahan akan lebih mudah. Selain itu akan memudahkan orang lain dalam membaca alir program yang dibuat.
Berikut diagram alir sistem kontrol untuk solar cell penjejak matahari 4 arah :
2. Pembuatan Program
Penulisan program dilaksanakan setelah diagram alir selesai dirancang. Pembuatan program untuk aplikasi solar cell penjejak matahari 4 arah ini, penulis menggunakan bahasa C dengan referensi diagram alir. Program ditulis dengan menggunakan program CodeVisionAVR. Program ini merupakan program khusus yang memang dikhususkan untuk pemrograman AVR dengan menggunakan bahasa C.
CodeVision AVR merupakan program terintegrasi untuk pembuatan program, compiler dan juga In System Programing (ISP) menggunakan port parallel. Akan tetapi dikarenakan penulis tidak menggunakan port parallel dalam mendownload program, maka fasilitas ISP ini tidak dipergunakan.
Gambar 3.11 Pembuatan Program Menggunakan CodeVision AVR
Program dengan bahasa C yang digunakan untuk aplikasi solar cell penjejak matahari 4 arah dapat dilihat pada lampiran 1.
Setelah program dibuat, program harus di-compile menjadi format .hex agar dapat didownload ke mikrokontroler Meng-compile program merupakan
proses penterjemahan dari bahasa C yang telah ditulis menjadi bahasa mesin yang dipahami oleh mikrokontroler. Mikrokontroler hanya memahami bahasa mesin dalam format HEX. Proses compailing ini dilakukan juga dengan menggunakan software CodeVisionAVR dengan hanya menekan tombl F9 setelah program selesai ditulis.
Bila tidak ada pesan kesalahan, proses kompilasi telah berhasil. Bila ada pesan kesalahan, dapat dicari kesalahan yang terjadi berdasarkan informasi pesan kesalahan tersebut. Setelah selesai proses compiler maka akan terbentuk file dengan nama yang sama dengan nama project yang kita buat akan tetapi dengan format .hex pada folder yang sama dimana kita menyimpan project kita.
3. Programming/Downloading/Burning
Merupakan proses pengisian program yang sudah dalam kode mesin (berupa file berformat HEX) kedalam memori program flash mikrokontroler. Jika komputer kita mempunyai port paralel, maka proses pengisian program ini dapat dilakuakn sekaligus dari program CodeVisionAVR. Akan tetapi karena dalam project ini penulis tidak mengunakan port paralel tetapi menggunakan port USB, maka untuk mengisi program ini dilakukan menggunakan perangkat programmer (hardware) beserta software ISP-nya, yaitu menggunakan antarmuka iRIZ07-USBdownloader beserta software ISP-nya, AVR8 Burn O-Mat.
Perangkat yang dibutuhkan dalam pengisian flash ATmega8535 , adalah: a. Catu daya 5 volt.
b. Rangkaian ISP downloader, iRIZ07-USBdownloader c. Rangkaian sistem minimum mikrokontroler ATmega8535 d. PC dengan sistem operasi MS Windows Me/NT/XP e. Perangkat lunak pemrograman, AVR8 Burn O-Mat.
f. Kabel USB untuk komunikasi PC dengan rangkaian ISP downloader. Urutan cara pengisian program ke dalam program flash ATmega8535 adalah sebagai berikut:
a. Pasang IC ATmega8535 di rangkaian sistem minimum.
b. Hubungkan rangkaian ISP downloader dengan rangkaian sistem minimum ATmega8535 dengan konfigurasi seperti dalam Gambar 3.13
Gambar 3.13 Konfigurasi PIN iRIZ07-USBdownloader
c. Pastikan kabel USB telah terhubung antara downloader dengan PC. d. Berikan catu daya 5 volt pada rangkaian sistem minimum
mikrokontroler ATmega8535. e. Siapkan program yang telah dibuat. f. Jalankan AVR8 Burn O-Mat
g. Untuk mendownload, pilih AVR target pada kolom AVR type kemudian masukan file *.hex dengan melalui tombol file.
To ATMega
To USB
h. Setelah memilih AVR type dan file yang akan di download, klik write dan tunggu hingga proses pengisian program selesai.
Gambar 3.14 Tampilan Program AVR8 Burn-O Mat
3.2.4. Proses Perakitan
Setelah semua bagian selesai dikerjakan, maka dilanjutkan dengan merangkaikan semua bagian yang telah dibuat. Langkah – langkah yang dilakukan dalam proses perakitan antara lain sebagai berikut :
1. Bagian – bagian kerangka penjejak matahari disatukan sesuai dengan rancangan awal yaitu disatukan dengan menggunakan mur baut dan lem bakar dan lemH-Qi
2. Merakit rangka dudukan motor DC dengan motor DC yang terhubung dengan besi ulir;
3. Memasang dudukan motor DC dengan rangka utama penjejak matahari; 4. Memasang panel solar cell;
5. Menempatkan dudukan sensor cahaya pada panel solar cell; 6. Menempatkan rangkaian dan aki dalam kotak rangkaian;
7. Menghubungkan PCB antar blok rangkaian yang satu dengan yang lain menggunakan kabel penghubung;
8. Menghubungkan sensor cahaya, limit switch dan motor DC dengan blok rangkaian menggunakan kabel.
9. Hubungkan panel solar cell dengan charger controller dan aki sebagai sumber daya listrik untuk keseluruhan rangkaian
10. Solar cell penjejak matahari 4 arah siap digunakan, tempatkan solar cell di tempat terbuka dengan arah yang direkomendasikan untuk hasil yang maksimal.