1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Indonesia merupakan Negara kepulauan dengan wilayah pesisir yang sangat luas dan garis pantai yang sangat panjang. Wilayah pesisir merupakan wilayah yang memiliki karakteristik tersendiri dan unik. Saat ini kajian mengenai wilayah pesisir sangat penting dilakukan guna melakukan pembangunan yang berkelanjutan wilayah pesisir.
Wilayah intertidal merupakan bagian dari wilayah pesisir yang dipengaruhi oleh pasang surut air laut dengan luas area yang sempit. Wilayah ini terletak di antara pasang tertinggi dan surut terendah. Terdapat variasi faktor lingkungan yang cukup besar pada zona ini, seperti fluktuasi suhu, salinitas dan kecerahan. Variasi ini dapat terjadi pada daerah yang hanya berjarak sangat dekat saja misalnya beberapa cm (Anonim, 2011).
Informasi mengenai wilayah intertidal akan sangat berguna dalam pengembangan wilayah pesisir maupun dalam penentuan batas maritim. Batas maritim suatu Negara ditentukan berdasarkan pada garis pangkal yang ditentukan berada pada titik surut terendah. Oleh karena itu diperlukan data yang dapat diamati secara berkala guna melakukan pengawasan terhadap perubahan garis pantai tersebut. Sedangkan untuk kepentingan pengembangan infrastruktur, informasi ini sangat berguna dalam berbagai pekerjaan, misalnya dalam pembangunan dermaga yang efisien dan dapat mendukung aspek keselamatan. Selain itu, informasi ini juga berguna dalam pengembangan energi terbarukan dengan memanfaatkan air pasang-surut.
Pemantauan wilayah intertidal dapat dilakukan dengan 2 metode, yaitu pengamatan langsung ke lapangan dan pengamatan tidak langsung. Pengamatan langsung ke lapangan dilakukan dengan cara surveyor langsung datang ke lapangan untuk melakukan pengamatan dengan menggunakan berbagai macam alat ukur terestris. Sementara metode tidak langsung dilakukan dengan memanfaatkan data
citra penginderaan jauh sebagai data utama yang dilengkapi dengan data pasang surut dan data DEM sebagai pelengkap identifikasi. Dibandingkan dengan pengamatan langsung ke lapangan, pemanfaatan teknologi penginderaan jauh lebih menghemat waktu dan biaya, serta sumberdaya manusia dalam pelaksanaanya. Penginderaan jauh terbagi ke dalam penginderaan jauh sensor aktif dan penginderaan jauh sensor pasif. Penginderaan jauh sensor aktif memiliki kelebihan yaitu tidak terpengaruh oleh awan dan mampu melakukan perekaman data baik siang maupun malam hari.
Penggunaan penginderaan jauh sensor aktif telah banyak digunakan dalam pengamatan di berbagai wilayah di Indonesia. Citra hasil penginderaan jauh sensor pasif pada wilayah Timur Indonesia biasanya tertutup oleh awan lebih dari 10 % dalam satu scene citranya, sehingga tidak layak untuk digunakan. Pengamatan wilayah intertidal pada proyek ini menggunakan citra ALOS PALSAR (Advanced
Land Observing Satellite Phased Array type L-band Synthetic Aperture RADAR)
yang termasuk ke dalam kelompok penginderaan jauh sensor aktif.
Wilayah perairan Merauke merupakan wilayah perairan yang dapat dikategorikan sebagai suatu wilayah yang unik. Berdasarkan data profil Kabupaten Merauke tahun 2006 yang diterbitkan oleh BAPPEDA (Badan Perencanaan Dan Pembangunan Daerah) Kabupaten Merauke, wilayah Merauke memiliki tunggang pasut yang sangat besar dan inklinasi kemiringan lereng pantai yang landai (0% - 8%). Berdasarkan hal ini dapat disimpulkan atau diambil asumsi bahwa Merauke memiliki wilayah intertidal yang sangat luas.
I.2. Tujuan
Tujuan dari proyek ini adalah:
1. Melakukan identifikasi wilayah intertidal di wilayah perairan Merauke.
2. Melakukan analisis dan estimasi luas wilayah intertidal perairan Merauke dengan menggunakan citra ALOS PALSAR, data pasang surut dan data DEM.
I.3. Manfaat
Memberikan gambaran mengenai kemampuan citra satelit ALOS PALSAR dalam mengidentifikasi wilayah intertidal. Hasil dari identifikasi wilayah intertidal
diharapkan dapat menjadi acuan dalam pengembangan lebih lanjut dari wilayah perairan Merauke itu sendiri.
Secara langsung diharapkan hasil dari proyek ini dapat digunakan sebagai dasar dalam pembangunan wilayah pesisir Merauke. Pembangunan infrastruktur di wilayah pesisir harus dilakukan secara efisien dan efektif dengan memperhatikan bentuk garis pantai serta gelombang pasang surut di perairan wilayah pesisir tersebut. Studi ini dapat dimanfaatkan dalam kajian penentuan batas wilayah maritim. Dengan penentuan garis pantai pada surut terendah, maka hasil dari kajian wilayah
intertidal mampu dimanfaatkan dalam hal penentuan garis pangkal terluar kepulauan
Indonesia.
I.4. Lingkup Pekerjaan
Area yang dijadikan sebagai objek penelitian terletak pada distrik Merauke, Kabupaten Merauke. Data pasang surut yang digunakan dalam proyek ini merupakan hasil dari prediksi dengan menggunakan model pasut global TPXO 7.1 pada posisi stasiun pasang surut Merauke (140°20.00' BT, 8°32.00' LS). Stasiun pasang surut tersebut dinilai telah mampu menghasilkan data yang mampu mewakili kondisi pasang surut perairan Merauke yang khas.
Citra ALOS PALSAR yang digunakan merupakan citra yang diambil pada 9 Juli 2007 pukul 13:31:54. Citra ALOS PALSAR ini merupakan citra pada level 1.5 (geometry corrected) dengan resolusi spasial sebesar 12,5 m. Sedangkan data DEM merupakan hasil generasi dari citra SRTM. Data SRTM yang digunakan memiliki resolusi spasial sebesar 90 m dengan ketelitian vertikal sebesar 5-8 m.
Hasil identifikasi wilayah intertidal dalam proyek ini disajikan dalam bentuk peta dengan sistem proyeksi UTM zona 54S datum WGS 1984. Wilayah intertidal yang terbentuk akan dihitung luasnya dengan menggunakan metode penghitungan luas dengan titik koordinat. Hasil dari identifikasi wilayah intertidal dalam proyek ini akan digunakan sebagai data untuk melakukan analisis signifikansi. Sesuai dengan resolusi dari data SRTM yang digunakan, maka lebar intertidal yang terbentuk haruslah berada di atas 90 m. Titik-titik pembentuk wilayah intertidal dengan lebar kurang dari 90 m dianggap sebagai titik yang tidak signifikan.
I.5. Landasan Teori
I.5.1. Penginderaan Jauh
Penginderaan jauh merupakan suatu ilmu dan seni yang digunakan untuk mendapatkan informasi dari suatu obyek atau daerah yang akan dikaji tanpa melakukan kontak langsung dengan obyek atau daerah tersebut (Lillesand dan Kiefer, 1999). Melalui teknologi penginderaan jauh, informasi dari suatu daerah yang sulit terjangkau dapat diambil secara lebih efisien dan efektif.
Penginderaan jauh adalah suatu sistem dengan menggunakan sensor yang terpasang pada suatu wahana udara atau satelit untuk mendeteksi gelombang elektromagnetik yang dipantulkan dari permukaan bumi (Tso dan Mather, 2009). Citra penginderaan jauh digunakan secara luas baik dalam lingkup oseanografi, terestris, maupun aplikasi lainya seperti pemetaan tutupan lahan, permodelan dan pemantauan lingkungan, dan pembaharuan basis data geografis.
Menurut Levin (1999), penginderaan jauh merupakan pengukuran atau pengambilan informasi dari suatu properti atau objek melalui alat perekaman tanpa melakukan kontak secara langsung terhadap objek yang dipelajari. Pengukuran ini dimaksudkan untuk mengumpulkan informasi yang berhubungan dengan lingkungan, seperti pengukuran medan gaya berat, radiasi elektromagnetik, atau gelombang akustik. Penginderaan jauh memiliki beberapa keunggulan, diantaranya:
1. Lebih murah dibandingkan dengan pengukuran konvensional,
2. Lebih aman dibandingkan survey hidrografi yang dilakukan di tepi pantai, 3. Mampu untuk mendeteksi perubahan secara terus-menerus,
4. Tersedia untuk area yang luas di seluruh dunia,
5. Geometri yang melekat pada satu scene citra umumnya sangat baik.
Khorram, dkk.. (2012) menyatakan bahwa penginderaan jauh adalah pengambilan dan pengukuran untuk mendapatkan informasi mengenai suatu fenomena, objek, atau material melalui alat perekaman tanpa kontak fisik dengan objek yang diambil informasinya. Penginderaan jauh berhubungan dengan teknologi untuk melakukan perekaman energi elektromagnetik yang dipancarkan dari area atau objek pada permukaan tanah bumi, lautan, ataupun atmosfer.
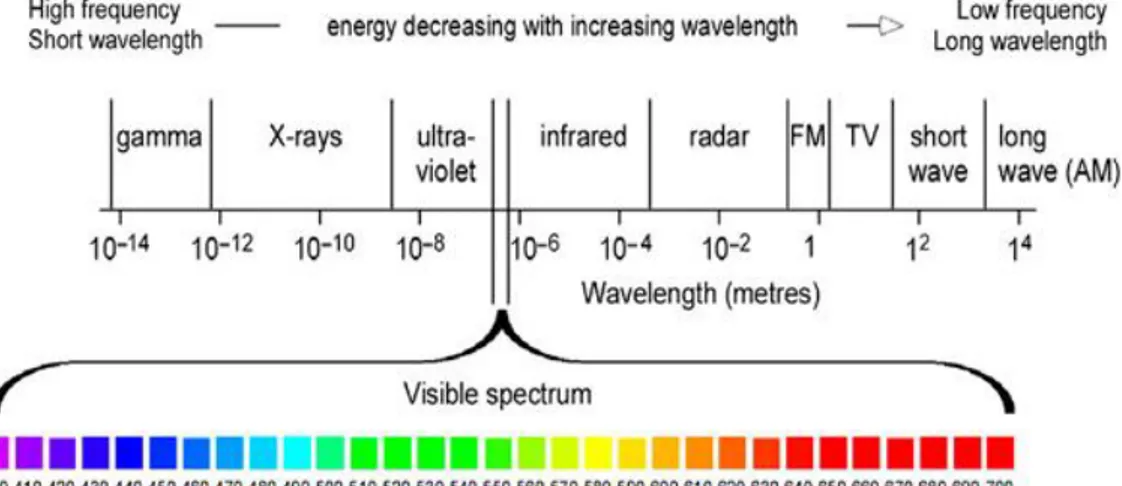
Pengukuran dengan menggunakan metode penginderaan jauh, sensor akan merekam gelombang elektromagnetik yang terpancar dari objek menjadi informasi yang disimpan ke dalam bentuk digital number. Gelombang elektromagnetik yang terekam memiliki karakteristik yang berbeda-beda tergantung dari panjang gelombang itu sendiri dan disebut sebagai spektrum gelombang elektromagnetik seperti pada Gambar I.1.
Gambar I.1 Spektrum gelombang elektromagnetik (Purkis dan Klemas, 2011) I.5.1.1. Penginderaan jauh sistem aktif dan sistem pasif Penginderaan jauh dibedakan menjadi dua jenis berdasarkan sensor yang digunakan. Yaitu penginderaan jauh sistem aktif yang menggunakan sensor aktif dan penginderaan jauh sistem pasif yang menggunakan sistem pasif (Khorram, dkk., 2012).
Penginderaan jauh sistem aktif adalah penginderaan jauh yang menggunakan gelombang elektromagnetik yang ditransmisikan dari sensor pada wahana terbang menuju objek yang akan diambil informasinya. Gelombang elektromagnetik yang mengenai objek akan dipantulkan kembali dan diterima oleh sensor untuk dilakukan perekaman data. Penginderaan jauh sistem aktif dapat dilakukan baik pada siang maupun malam hari karena tidak bergantung pada matahari. Citra dengan penginderaan jauh sistem aktif antara lain adalah ALOS PALSAR (Advanced Land
Observng Satellite Phased Array type L-band Synthetic Aperture RADAR), ERS
(Earth Resources Satellite), dan RADARSAT (Radio Detection And Ranging
Penginderaan jauh sistem pasif adalah penginderaan jauh yang memanfaatkan pantulan gelombang elektromagnetik yang dipancarkan oleh matahari menuju suatu objek dan dipantulkan kembali atau pancaran gelombang elektromagnetik dari objek itu sendiri dan diterima oleh sensor. Sehingga penginderaan jauh sistem pasif tidak dapat dilakukan di malam hari. Citra dengan penginderaan jauh sistem pasif anatara lain adalah Quick Bird, Landsat (Land Satellite), SPOT (Sisteme Probatoire
d’Observation de la Terre), dan IKONOS.
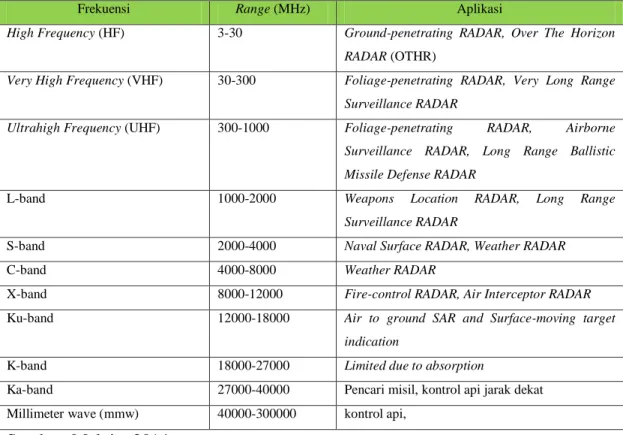
I.5.1.2. Penginderaan jauh sistem RADAR RADAR (Radio Detection And Ranging) merupakan salah satu penginderaan jauh sistem aktif, dimana dalam prakteknya menggunakan gelombang mikro aktif. RADAR menggunakan gelombang radio sebagai medianya dalam penentuan posisi dari suatu obyek yang diamati (Lillesand dan Kiefer, 1999). Sensor mengirimkan gelombang mikro menuju obyek yang akan dikaji, kemudian pantulan dari gelombang mikro ini akan diterima kembali oleh sensor untuk direkam. Penginderaan jauh sistem RADAR terdapat beberapa kanal yang umum digunakan seperti pada Tabel I.1.
Tabel I.1 Kanal-kanal pada RADAR
Frekuensi Range (MHz) Aplikasi
High Frequency (HF) 3-30 Ground-penetrating RADAR, Over The Horizon RADAR (OTHR)
Very High Frequency (VHF) 30-300 Foliage-penetrating RADAR, Very Long Range Surveillance RADAR
Ultrahigh Frequency (UHF) 300-1000 Foliage-penetrating RADAR, Airborne Surveillance RADAR, Long Range Ballistic Missile Defense RADAR
L-band 1000-2000 Weapons Location RADAR, Long Range
Surveillance RADAR
S-band 2000-4000 Naval Surface RADAR, Weather RADAR
C-band 4000-8000 Weather RADAR
X-band 8000-12000 Fire-control RADAR, Air Interceptor RADAR
Ku-band 12000-18000 Air to ground SAR and Surface-moving target
indication
K-band 18000-27000 Limited due to absorption
Ka-band 27000-40000 Pencari misil, kontrol api jarak dekat
Millimeter wave (mmw) 40000-300000 kontrol api,
Dibandingkan dengan penginderaan jauh konvensional, sistem RADAR memiliki kelebihan-kelebihan antara lain bebas terhadap gangguan yang terjadi di atmosfer (misalnya awan, asap, hujan) dan dapat melakukan pengambilan citra baik siang maupun malam hari.
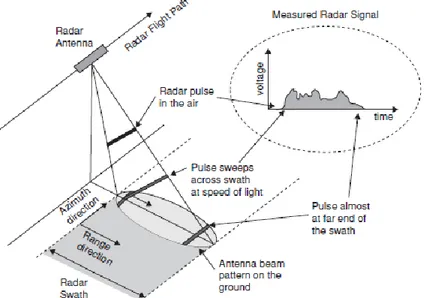
Menurut Zyl dan Kim (2010) citra RADAR dapat diproduksi melalui dua mekanisme yang berbeda. Yaitu real aperture RADAR dan synthetic aperture
RADAR. Citra RADAR secara umum diakuisisi dalam potongan-potongan
bersamaan dengan satelit atau wahana udara yang membawa sistem RADAR sepanjang lintasan terbang. Geometri dari pengambilan citra RADAR dapat dilihat pada Gambar I.2.
Gambar I.2 Geometri pengambilan citra sistem RADAR
Resolusi spasial dari citra didefinisikan sebagai pemisahan dua fitur yang saling berdekatan yang masih dapat diidentifikasi dalam citra akhir. (Zyl dan Kim, 2010). Secara umum penginderaan jauh sistem RADAR menggunakan sistem pemasangan SLAR (Side Looking Airborne RADAR). Penginderaan jauh sistem RADAR memiliki 7 buah parameter sistem RADAR yang harus diperhatikan yaitu resolusi, polarisasi, frekuensi, geometri, efek bayangan, efek pemendekan lereng depan, dan efek rebah dalam.
SLAR memancarkan dan menerima gelombang mikro menggunakan antena yang terpasang pada bagian samping dari wahana terbang (Gambar I.2). area yang terekam sebagai citra adalah potongan yang tersapu oleh pancaran gelombang sesuai dengan arah azimuth wahana terbang. Resolusi citra dari SLAR tergantung dari pulse
duration dan lebar antenna. Pulse duration mempengaruhi resolusi dari range direction, dan lebar antenna mempengaruhi resolusi azimuth (Tso dan Mather 2009).
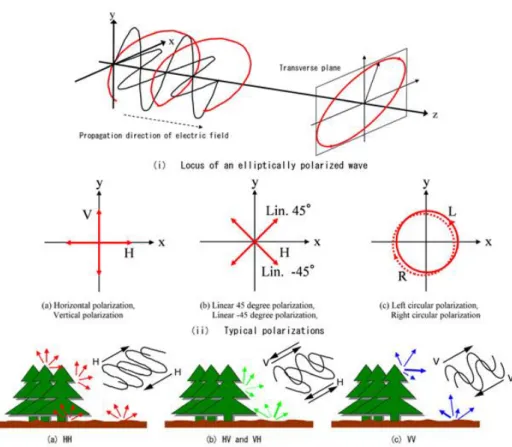
Faktor utama yang mempengaruhi sifat khas transmisi sinyal dari suatu sistem RADAR ialah panjang gelombang dan polarisasi pulsa tenaga yang digunakan. Satu sinyal SLAR dapat ditransmisikan pada bidang mendatar (H) maupun tegak (V). Sinyal tersebut dapat pula diterima pada bidang mendatar dan tegak. Dengan demikian terdapat kemungkinan empat kombinasi sinyal trasmisi dan penerimaan yang berbeda, yaitu dikirim H, diterima H; dikirim H, diterima V; dikirim V, diterima H; dan dikirim V, diterima V. Citra dengan polarisasi searah dihasilkan dari paduan HH dan VV. Citra polarisasi silang dihasilkan dari paduan HV atau VH. Berbagai obyek mengubah polarisasi tenaga yang mereka pantulkan dalam berbagai tingkatan, maka bentuk polarisasi sinyal mempengaruhi kenampakan obyek pada citra yang dihasilkan (Nurhadiatin, 2011). Ilustrasi mengenai polarisasi dapat dilihat pada Gambar I.3.
Gambar I.3 Ilustrasi polarisasi (sumber: www.eorc.jaxa)
Kedalaman penetrasi gelombang untuk target yang diindera dan kekasaran relatif permukaan sangat ditentukan oleh frekuensi RADAR. Kedalaman penetrasi berbanding lurus dengan panjang gelombang, semakin panjang gelombangnya maka semakin dalam pula penetrasinya. Penginderaan jauh sistem RADAR menggunakan gelombang mikro dengan frekuensi antara 0.3 GHz hingga 300 GHz atau dengan panjang gelombang 1 m hingga 0.001 m (Hamzah, 2004).
Penginderaan jauh sistem RADAR, sensor cenderung mengindera ke bawah pada satu sisi bidang orbit yang disebut juga sebagai slant range. Slant range merupakan garis di antara RADAR dan elemen pada permukaan bumi yang dipantulkan. Slant range dapat juga didefinisikan sebagai jarak dari satelit ke permukaan bumi dari arah lihat, dimana garis tersebut diukur dalam satuan waktu mulai ketika sinyal ditransmisikan sampai kembali lagi ke sensor. Ground range merupakan jarak pada permukaan bumi yang direpresentasikan oleh citra. Untuk melakukan konversi dari slant range menjadi ground range diperlukan sudut jauh
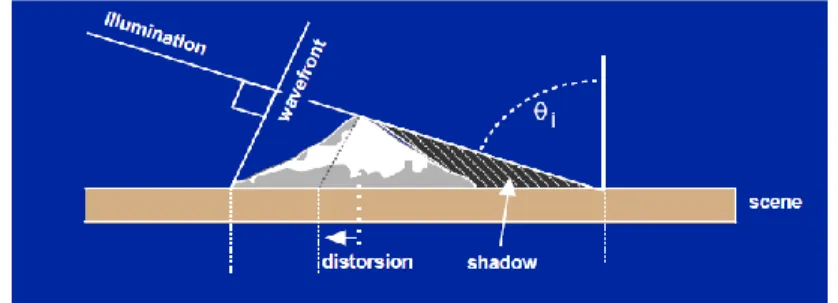
(incident angle). Sudut jauh adalah sudut yang terbentuk antara cahaya iluminasi RADAR dan permukaan bumi. Besarnya sudut ini tergantung dari tinggi satelit RADAR ke permukaan bumi. Sudut ini akan berubah dari near range ke far range dan perubahan ini akan mempengaruhi geometri citra RADAR. Geometri pengambilan citra RADAR dapat dilihat pada Gambar I.4.
Gambar I.4 Geometri citra RADAR (Smith, 2012)
Efek bayangan terjadi ketika objek yang lebih besar mengaburkan objek yang lebih kecil pada saat perekaman citra. Hal ini terjadi karena objek yang ebih besar menutupi objek yang lebih kecil di sekitarnya, sehingga objek kecil tersebut tidak tersapu oleh gelombang yang dipancarkan oleh RADAR. Ilustrasi dari efek bayangan ditunjukkan pada Gambar I.5.
Gambar I.5 Efek bayangan (Brisco, 2013)
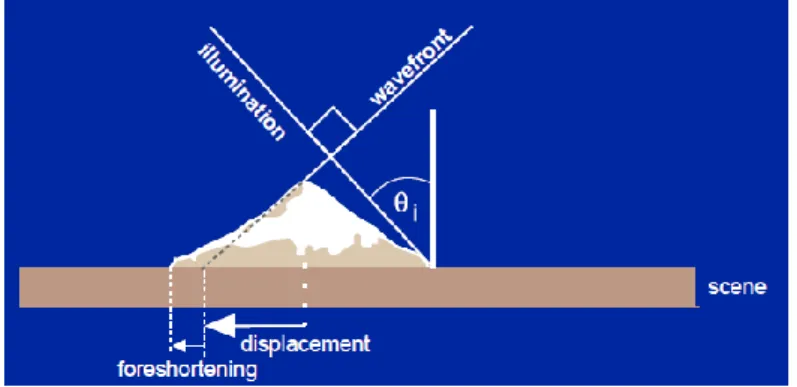
Efek pemendekan lereng depan menyebabkan objek menjadi terlihat lebih kecil. Hal ini disebabkan karena objek yang terkena pengaruh menjadi terlihat lebih cerah pada citra. Efek ini dapat dihilangkan dengan cara menaikkan sudut jatuh hingga mendekati sudut 90o, akan tetapi hal ini akan menimbulkan efek bayangan yang cukup besar. Ilustrasi efek bayangan dapat dilihat pada Gambar I.6.
Gambar I.6 Efek pemendekan lereng depan (Brisco, 2013)
Efek rebah dalam menyebabkan terjadinya penumpukan suatu objek terhadap objek lainya yang lebih dekat ke sensor. Efek ini mengakibatkan puncak dari suatu objek akan ditumpuk atau digantikan oleh bagian dasarnya. Umumnya efek ini terjadi pada sudut jatuh yang relatif kecil. Ilustrasi efek rebah ditunjukkan pada Gambar I.7.
Gambar I.7 Efek rebah (Brisco, 2013)
I.5.2. ALOS PALSAR
ALOS singkatan dari Advanced Land Observing Satellite adalah satelit multimisi milik Jepang yang merupakan satelit generasi lanjutan dari JERS-1 (Japanese Earth Resource Satellite-1) dan ADEOS (Advanced Earth Observing Satellite) yang dilengkapi dengan teknologi yang lebih maju. Satelit ALOS telah berhasil diluncurkan pada tanggal 24 Januari 2006. Satelit ini mempunyai 5 misi utama yaitu, kartografi, pengamatan regional, pemantauan bencana alam, penelitian sumber daya alam, dan pengembangan teknologi. Untuk dapat mencapai misi utama,
ALOS dilengkapi dengan tiga buah sensor penginderaan jauh dan subsistem pendukung misi yaitu Panchromatik Remote-sensing Instrument for Stereo Mapping (PRISM) dengan resolusi along track 2.5 meter, Advanced Visible and Near Infrared
Radiometer type- 2 (AVNIR-2) dengan resolusi 10 meter dan Phased-Array type L-band Synthetic Apeture RADAR (PALSAR).
Untuk dapat bekerja dengan ketiga jenis sensor di atas, ALOS dilengkapi dengan dua teknologi yang lebih maju. Pertama teknologi yang mampu mengerjakan data dalam kapasitas yang sangat besar dengan kecepatan tinggi, dan selanjutnya kapasitas untuk menentukan posisi satelit dengan ketinggian yang lebih tepat. Peluncuran satelit ALOS ditujukan untuk memberikan kontribusi terhadap aplikasi kartografi, pengamatan regional, pemantauan bencana alam, dan penelitian sumber daya alam.
Purwadhi dan Sanjoto (2008), mengungkapkan bahwa tujuan dan misi ALOS secara garis besar antara lain:
1. Survei sumberdaya lahan dengan pengambilan data dari beberapa arah sudut pengamatan.
2. Pemetaan dengan akurasi tinggi.
3. Pengamatan lokal menggunakan citra PALSAR resolusi tinggi. 4. Pemantauan hutan dengan menggunakan model multi polarimetrik. 5. Pemantauan daerah bencana.
PALSAR merupakan sensor gelombang mikro aktif yang menggunakan frekuensi L-band. Sensor ini memberikan kinerja yang lebih baik daripada sensor SAR (Synthetic Aperature RADAR) pada satelit JERS-1. Hal ini memungkinkan instrumen PALSAR untuk melakukan pengamatan yang bebas dari tutupan awan pada siang atau malam hari.
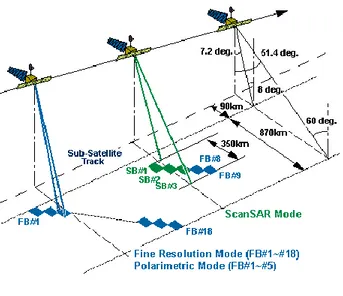
PALSAR dioperasikan dalam tiga mode polarimetri yaitu single polarisation (HH atau VV), dual polarisation (HH+HV atau VV+VH), dan full polarimetry (HH+HV+VH+VV). Prinsip geometri dari PALSAR disajikan dalam Gambar I.8 sedangkan karakteristik teknis sensor dan data citra PALSAR disajikan dalam Tabel I.2.
Gambar I.8 Prinsip geometri PALSAR
(sumber: http://www.eorc.jaxa.jp/ALOS/en/about/palsar.html)
Tabel I.2 Karakteristik teknis sensor dan data citra PALSAR
Mode operasi Fine Beam Single pol- (FBS) Fine Beam Dual pol-(FBD) ScanSAR Polarimetrik Chirp bandwith 28 Mhz 14 Mhz 14 Mhz, 28 Mhz 14 Mhz Polarisasi HH, VV HH+HV, VV+VH HH, VV HH+VV+HV+VH
Sudut dating 8-60 derajat 8-60 derajat 18-43 derajat 8-30 derajat
Resolusi spasial
range
7-44 meter 14-88 meter 100 meter 24-89 meter
Lebar liputan satuan citra dari
pengamatan
40-70 km 40-70 km 250-350 km 20-65 km
Panjang bit 5 bit 5 bit 5 bit 3/5 bit
Kecepatan data 240 Mbps 240 Mbps 120 Mbps, 240 Mbps
240 Mbps
Akurasi radiometric
Citra (scene) : 1dB/orbit : 1,5dB
Frekuensi pusat L band (1270 Mhz)
I.5.3. SRTM (Shuttle RADAR Topography Mission)
SRTM (Shuttle RADAR Topography Mission) merupakan sebuah penelitian internasional yang bertujuan untuk mendapatkan data Digital Elevation Model (DEM). Data ini telah beredar luas sejak tahun 2002 dan dapat diunduh secara gratis. Data ini dikeluarkan oleh Badan Antariksa Amerika Serikat (NASA) dan Badan Geologi Amerika Serikat (USGS).
Data SRTM secara bebas dapat diunduh dengan resolusi spasial di luar Amerika Serikat sebesar 3 arc second (± 90 m) dan akurasi ketinggian ± 16 m. Data ini dapat digunakan langsung melalui Google-earth (earth.google.com) atau dapat diunduh dari berbagai situs internet (misalnya http://srtm.csi.cgiar.org/) untuk kemudian digunakan dalam berbagai kepentingan pengguna (Amhar dan Ferdiansyah, 2007).
I.5.4 Pengolahan Citra
Untuk mendapatkan informasi yang diperlukan dari suatu citra, maka perlu dilakukan tahapan pengolahan citra. Pengolahan citra dilakukan untuk mendapatkan informasi wilayah intertidal dari area yang dijadikan obyek proyek. Tahapan-tahapan yang harus dilakukan dalam pengolahan citra akan dijelaskan dalam sub-bab berikutnya.
I.5.4.1. Koreksi radiometrik Koreksi radiometrik perlu dilakukan untuk memperbaiki nilai-nilai piksel yang tidak sesuai dengan nilai pantulan objek yang sebenarnya. Pemberian koreksi ini biasanya mempertimbangkan faktor gangguan atmosfer sebagai kesalahan utama. Koreksi ini mengambil asumsi bahwa nilai piksel terendah pada suatu scene seharusnya adalah nol,sesuai dengan bit coding sensor (Djurjani dan Kartini, 2004).
Koreksi radiometrik dapat dilakukan melalui beberapa cara antara lain:
1. Penyesuaian histogram, yaitu dengan cara melihat nilai histogram setiap band secara independent. Objek dengan nilai spektral paling lemah seharusnya memberikan nilai 0, apabila nilainya ternyata lebih dari 0, maka nilai tersebut dianggap sebagai offset dan harus dikoreksi.
2. Auto Corellation, yaitu dengan cara menggantikan data yang hilang dari suatu
3. Metode linear, yaitu dengan cara memodelkan nilai masukkan dan nilai keluaran
dari suatu citra.
Kesalahan radiometrik pada citra dapat menyebabkan kesalahan interpretasi terutama jika interpretasi dilakukan secara digital yang didasarkan pada nilai piksel. Kesalahan radiometrik pada citra RADAR jelas lebih terlihat dibandingkan dengan citra optik. Citra RADAR selalu dihasilkan dengan speckle noise yang memenuhi seluruh bagian scene citra RADAR itu sendiri (Richards, 2009).
Speckle noise pada citra RADAR dapat direduksi dengan menerapkan filter
pada citra. Hal ini akan dibahas pada bab selanjutnya.
I.5.4.2. Koreksi geometrik Koreksi geometrik perlu dilakukan terhadap citra satelit, karena beberapa faktor, diantaranya yaitu: konfigurasi satelit, sudut pandang geometri sensor, dan permukaan yang diamati. Sumber kesalahan dari distorsi geometrik (Pohl, 2000) adalah rotasi bumi, kelengkungan bumi, topografi, dan variasi platform. Kesalahan-kesalahan tersebut, mengakibatkan citra yang didapat dari proses perekaman mengalami kesalahan secara geometrik dan harus dikoreksi.
Koreksi geometrik merupakan koreksi yang harus dilakukan untuk mendefinisikan sistem koordinat dari citra. Biasanya citra belum terkoreksi secara geometrik, oleh karena itu perlu dilakukan koreksi geometrik agar citra dapat digunakan untuk kepentingan geografis. Perlu dilakukan pendefinisian sistem koordinat serta datum yang digunakan, agar citra dapat digunakan untuk kepentingan lebih jauh.
Proses registrasi citra dapat dibedakan menjadi dua macam yaitu registrasi citra ke citra dan registrasi citra ke peta. Registrasi citra ke peta dilakukan dengan cara menggunakan titik-titik kontrol (GCP/Ground Control Point) yang tersebar pada citra. Titik-titik kontrol ini harus diketahui posisinya baik di dalam sistem koordinat citra dan sistem koordinat tanah. Koordinat dalam sistem koordinat tanah dapat diperoleh melalui pengamatan langsung ke lapangan (dengan menggunakan GPS) maupun dari interpolasi di atas peta topografi. Titik-titik yang dipilih harus sedemikian rupa sehingga mudah dididentifikasi di atas citra dan di permukaan bumi sebenarnya (Djurjani dan Kartini, 2004).
Registrasi citra ke citra dilakukan dengan menggunakan citra lain yang telah diketahui koordinat tanahnya sebagai acuan untuk mendefinisikan koordinat dari citra lain yang masih dalam koordinat citra.
I.5.4.3. Komposit warna Komposit citra (Musyarofah, dkk., 2010) adalah citra baru hasil dari penggabungan 3 saluran yang mampu menampilkan keunggulan dari saluran-saluran penyusunnya. Digunakan komposit citra ini dikarenakan oleh keterbatasan mata yang kurang mampu dalam membedakan gradasi warna dan lebih mudah memahami dengan pemberian warna.
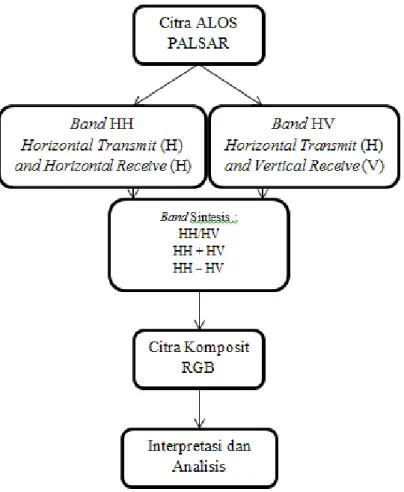
Citra ALOS PALSAR hanya memiliki dua buah band (HH dan HV), oleh karena itu perlu dilakukan pembentukan band sintesis untuk membentuk suatu citra komposit warna. Gambar I.9 menunjukkan langkah pembentukkan komposit warna pada citra ALOS PALSAR.
Gambar I.9 Metode pembuatan komposit warna ALOS PALSAR (Musyarofah, dkk., 2010)
Penelitian Nurhadiatin (2011) menggunakan citra ALOS PALSAR dengan kombinasi komposit warna HH-HV-HH/HV resolusi 12.5 m di Kabupaten Brebes, Cilacap, Banyumas dan Ciamis berhasil dilakukan identifikasi sebanyak 5 kelas tutupan lahan secara digital dengan proportion correct sebesar 65% sedangkan secara visual dapat membedakan 9 kelas tutupan lahan.
Penyusunan band yang digunakan untuk menghasilkan warna harus disesuaikan dengan tujuan penggunaan citra itu sendiri. Citra difokuskan penggunaanya untuk memisahkan tubuh air dan daratan, sehingga dapat diperoleh garis pantai dalam proyek ini.
I.5.4.4. Filterisasi citra RADAR Karakteristik dari citra SAR adalah adanya speckle
noise berupa tekstur bintik-bintik terang-gelap yang muncul secara acak pada citra. Noise tersebut mengakibatkan berkurangnya ketajaman citra untuk dilakukan
interpretasi secara visual oleh pengguna. Noise pada SAR dapat timbul akibat interferensi di antara sinyal-sinyal hamburan balik dari berbagai objek secara acak dalam suatu sel atau area tertentu yang disinarinya (Richards, 2009). Untuk mengurangi speckle noise dapat dilakukan dengan cara menerapkan metode filterisasi pada citra.
Tso dan Mather (2009) menyatakan untuk mereduksi speckle noise dapat dilakukan dengan menggunakan filter adaptive dan filter non-adaptive. Filter
adaptive menggunakan bobot yang bergantung pada derajad speckle pada citra,
sementara filter non-adaptive menggunakan bobot yang sama pada keseluruhan citra. Bila dibandingkan dengan filter non-adaptive, filter adaptive jauh lebih baik untuk digunakan dalam mereduksi speckle noise. Hal ini dikarenakan filter adaptive jauh lebih baik dalam menjaga keutuhan informasi yang lebih halus. Filter adaptive yang banyak digunakan antara lain (Tso dan Mather, 2009):
1. Filter Lee, filter yang berguna untuk memperhalus bintik pada data dengan intensitas yang berhubungan dengan citra dan juga mempunyai komponen aditif dan multiplikatif. Filter ini berbasis pada standard deviasi (sigma) yang berguna untuk menyaring data dengan didasarkan pada hitungan statistik dalam jendela filter secara individu. Filter ini juga mempertahankan ketajaman gambar dan detail sekaligus mereduksi noise dalam citra. Piksel yang disaring digantikan oleh nilai piksel terdekat disekitarnya.
2. Filter Frost, merupakan filter yang mengurangi noise dengan tetap mempertahankan tepi dalam citra RADAR. Filter ini menggunakan statistik lokal yang secara simetris sirkuler teredam secara eksponensial. Piksel yang disaring digantikan dengan suatu nilai hasil hitungan yang dihitung berdasarkan jarak dari pusat filter, faktor redaman dan varian lokal.
3. Filter Gamma, merupakan filter yang digunakan untuk mengurangi noise dengan tetap mempertahankan tepi dalam citra RADAR. Filter ini mirip dengan filter Frost, akan tetapi data diasumsikan memiliki distribusi gamma. Piksel yang disaring digantikan oleh nilai hasil hitungan yang dihitung berdasarkan nilai statistik lokal.
4. Filter Kuan, merupakan filter yang digunakan untuk mengurangi noise dengan tetap mempertahankan tepi dalam citra RADAR. Filter ini mengubah model
noise multiplikatif dalam model noise aditif. Filter ini mirip dengan filter Lee,
akan tetapi dalam filter ini digunakan fungsi pembobotan yang berbeda. Piksel yang disaring digantikan dengan nilai yang dihitung berdasarkan statistik lokal. I.5.4.5. Pemotongan citra Pemotongan citra merupakan tahapan dalam pengolahan citra digital yang dilakukan dengan cara memotong scene suatu citra menjadi sebagian saja. Hal ini dilakukan untuk mendapatkan citra pada daerah yang ingin dikaji lebih lanjut sesuai dengan kebutuhan pengguna.
Tahapan ini juga bertujuan untuk memperlancar kinerja komputer dalam pengolahan citra karena berkurangnya beban pada ukuran citra itu sendiri. Tahapan pemotongan citra dapat dilakukan sesuai dengan batas daerah proyek atau penelitian, oleh karena itu diperlukan adanya data mengenai batas daerah kajian (berupa koordinat maupun file shp) agar daerah yang dipotong akurat.
I.5.4.6. Klasifikasi citra Klasifikasi digital adalah suatu cara mengenali, menentukan letak dan melakukan pengelompokan objek menjadi kelas-kelas tertentu yang didasarkan pada kesamaan nilai spektral tiap piksel pada citra. Dalam melakukan klasifikasi digital harus diterapkan minimal dua buah saluran pemisahan menjadi kelas-kelas tertentu, didasarkan nilai yang dimiliki dalam dimensi jamak, artinya mendasarkan nilai piksel pada berbagai saluran (Djurjani dan Kartini, 2004).
Klasifikasi dibedakan sebagai klasifikasi tidak terkontrol dan klasifikasi terkontrol. Pada klasifikasi tidak terkontrol, pengguna tidak perlu memilih atau
menentukan training area pada citra. Klasifikasi ini pengguna hanya perlu menentukan jumlah kelas yang diinginkan, dan secara otomatis kelas akan dihasilkan sesuai dengan algoritma yang digunakan oleh pengguna (Tso dan Mather, 2009):
Klasifikasi terkontrol adalah klasifikasi dimana pengguna harus menentukan
training area untuk setiap kelas yang didefinisikan. Hasil dari klasifikasi ini sangat
bergantung dari seberapa baik pengguna mampu memodelkan distribusi dari kelas itu sendiri. Klasifikasi ini memerlukan pengalaman dari pengguna untuk mendefinisikan kelas pada suatu citra (Tso dan Mather, 2009).
Menurut Djurjani dan Kartini (2004), metode klasifikasi terkontrol dibedakan menjadi 3 macam, yaitu:
1. Berdasarkan jarak terdekat terhadap nilai rerata, prinsip kerjanya dengan cara menentukan keanggotaan suatu piksel pada kelas tertentu dengan menghitung jarak terpendek terhadap nilai reratanya. Metode ini memiliki penghitungan yang sederhana dengan ketelitian yang sebanding dengan metode yang lebih rumit.
2. Klasifikasi paralellepiped, penentuan kelas dengan tetap memperhitungkan adanya nilai bulat atau range melalui perhitungan statistik dan aturan tertentu. Klasifikasi ini, nilai piksel tertinggi dan terendah dimasukkan dalam bentuk empat persegi panjang yang merupakan batas kelas yang diuji.
3. Klasifikasi maximum likelihood, pada dasarnya klasifikasi ini merupakan pengelompokan piksel berdasarkan nilai pantulan sesuai dengan training area yang dipilih. Pelaksanaan klasifikasi ini dimulai dengan asumsi bahwa pikselnya mengikuti bentuk kurva normal. Digunakan klasifikasi maximum likelihood untuk memisahkan antara daratan dengan tubuh air pada proyek ini.
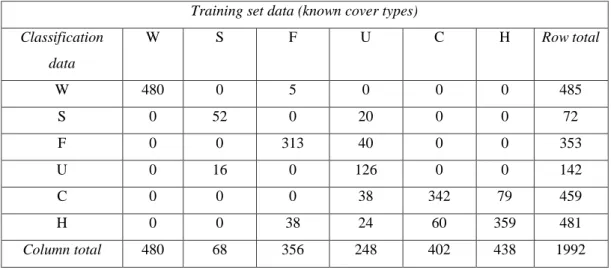
I.5.4.7. Uji Ketelitian hasil klasifikasi citra Uji ketelitian hasil klasifikasi citra dilakukan untuk mengevaluasi ketelitian dari hasil klasifikasi yang telah dilakukan. Seberapa besar hasil uji ketelitian ini akan menentukan besarnya tingkat kepercayaan terhadap penggunaan data. Uji ketelitian hasil klasifikasi dapat dilakukan melalui beberapa cara yaitu dengan melakukan pengecekan langsung ke lapangan dengan menggunakan beberapa titik sampel, menilai kecocokan hasil klasifikasi terhadap kondisi sebenarnya di lapangan, dan dengan menghitung nilai matriks konfusi pada setiap kelas untuk mengetahui tingkat ketelitianya.
Tabel I.3 Bentuk matriks konfusi dan perhitunganya
Training set data (known cover types) Classification data W S F U C H Row total W 480 0 5 0 0 0 485 S 0 52 0 20 0 0 72 F 0 0 313 40 0 0 353 U 0 16 0 126 0 0 142 C 0 0 0 38 342 79 459 H 0 0 38 24 60 359 481 Column total 480 68 356 248 402 438 1992
Sumber: Lillesand dan Kiefer (1999)
Producer’s accuracy W = 480/480 x 100% = 100% S = 052/068 x 100% = 76% F = 313/356 x 100% = 88% U = 126/248 x 100% = 51% C = 342/402 x 100% = 85% H = 359/438 x 100% = 82% User’s accuracy W = 480/485 x 100% = 99% S = 052/075 x 100% = 72% F = 313/353 x 100% = 87% U = 126/142 x 100% = 89% C = 342/459 x 100% = 74% H = 359/481 x 100% = 75% Overall accuracy =[(480 + 52 + 313 + 126 + 342 + 359)/1992] x 100% = 84%
(W : water; S : sand; F : forest; C : corn; H : hay)
Tingkat keakuratan hasil klasifikasi suatu citra dapat dihitung melalui tabel matriks konfusi. Akurasi pembuat (producers accuracy) dan akurasi pengguna (users
accuracy) dari setiap kelas dapat dihitung dengan menggunakan tabel matriks
konfusi.
Producers accuracy adalah nilai yang menunjukkan jumlah data lapangan yang
telah terklasifikasi secara benar pada suatu kelas klasifikasi. Producers accuracy dihitung dengan cara membagi jumlah piksel yang benar dengan total piksel daerah contoh per kelas. Hitungan akurasi jenis ini menghasilkan kesalahan residual yang disebut sebagai omission error.
Users accuracy adalah nilai yang menunjukkan jumlah piksel pada suatu kelas
klasifikasi yang merupakan nilai yang sesuai dengan kondisi nyata di lapangan.
Users accuracy dihitung dengan cara membagi jumlah piksel yang benar dengan
jumah piksel daerah contoh per kelas. Hitungan akurasi jenis ini menghasilkan kesalahan residual yang disebut sebagai comission error.
Overall accuracy menunjukkan banyaknya jumlah piksel yang terklasifikasi
secara benar pada tiap kelas dibanding jumlah sampel yang digunakan untuk uji akurasi pada semua kelas.
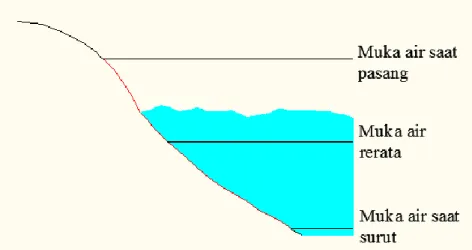
I.5.5. Wilayah intertidal
Wilayah intertidal merupakan daerah yang selalu terkena hempasan gelombang laut. Daerah ini hanya dapat ditemukan pada daerah dengan kemiringan pantai yang landai dan memiliki tunggang pasut yang besar. Wilayah ini terletak di antara pasang tertinggi dan surut terendah. Semakin terjal suatu pantai maka semakin kecil pula wilayah intertidal yang dimiliki pantai tersebut. Wilayah intertidal (Nybakken, 1992) merupakan daerah yang paling sempit di antara zona laut lainya. Ilustrasi mengenai wilayah intertidal dapat dilihat pada Gambar I.10. Gambar I.10 menunjukkan ilustrasi wilayah intertidal. Garis warna merah pada Gambar I.10 merupakan wilayah
intertidal yang dibatasi oleh muka air saat pasang dengan muka air saat surut.
Secara umum, daerah intertidal sangat dipengaruhi oleh pola pasang surutnya dan dapat dibagi dalam tiga zona. Zona yang pertama adalah zona supratidal, yaitu daerah di atas pasang tertinggi dari garis laut yang hanya memperoleh siraman air laut dari hempasan gelombang maupun ombak yang menerpa daerah tersebut. Yang kedua adalah zona intertidal, yaitu daerah yang terletak di antara pasang tertinggi
dan surut terendah. Zona yang ketiga adalah subtidal, yaitu zona yang terletak di bawah surut terendah garis permukaan laut.
Gambar I.10 Ilustrasi wilayah intertidal (sumber: http://www.depi.vic.gov.au/)
I.5.6. Pasang Surut
Pasang surut air laut (Hutabarat dan Evans, 1985) adalah proses naik turunnya muka air laut hampir secara periodik yang disebabkan karena adanya gaya tarik benda-benda angkasa di luar bumi dan adanya gaya sentrifugal yang disebabkan oleh perputaran bumi. Pasang surut laut merupakan hasil dari gaya tarik gravitasi dan efek sentrifugal. Efek sentrifugal adalah dorongan ke arah luar pusat rotasi. Gravitasi bervariasi secara langsung dengan massa tetapi berbanding terbalik terhadap jarak. Meskipun ukuran bulan lebih kecil dari matahari, gaya tarik gravitasi bulan dua kali lebih besar daripada gaya tarik matahari dalam membangkitkan pasang surut laut karena jarak bulan lebih dekat daripada jarak matahari ke bumi. Gaya tarik gravitasi menarik air laut ke arah bulan dan matahari menghasilkan dua tonjolan (bulge) pasang surut gravitasional di laut. Lintang dari tonjolan pasang surut ditentukan oleh deklinasi, sudut antara sumbu rotasi bumi dan bidang orbital bulan dan matahari.
Pasang surut purnama/pasang besar (spring tide) terjadi ketika bumi, bulan dan matahari berada dalam suatu garis lurus. Akan dihasilkan pasang tinggi yang sangat tinggi dan pasang rendah yang sangat rendah. Pasang surut purnama ini terjadi pada saat bulan baru dan bulan purnama.
Pasang surut perbani/pasang kecil (neap tide) terjadi ketika bumi, bulan dan matahari membentuk sudut tegak lurus. Akan dihasilkan pasang tinggi yang rendah dan pasang rendah yang tinggi. Pasang surut perbani ini terjadi pada saat bulan perempatan, bulan pertama dan perempatan bulan ketiga.
I.5.6.1. Model matematika pasut dan konstanta harmonik pasut Pasang surut (pasut) yang terjadi di permukaan bumi adalah hasil resultan dari jarak dan kedudukan bulan dan matahari terhadap bumi yang berubah secara periodik. Pasang surut dimodelkan dengan persamaaan (Poerbandono dan Djunarsjah, 2005):
yB = AB cos(ωt + ϕ) ... (I.1) keterangan:
yB : tinggi muka air saat t AB : amplitudo pasang surut ω : kecepatan sudut
t : waktu
ϕ : keterlambatan fase
Tabel I.4 Komponen harmonik pasut utama
Jenis komponen
Nama komponen
Periode (jam) Fenomena
Semi-diurnal M2 12.42 Gravitasi bulan dengan orbit lingkaran dan
sejajar ekuator bumi
S2 12.00 Gravitasi matahari dengan orbit lingkaran dan
sejajar ekuator bumi
N2 12.66 Perubahan jarak bulan ke bumi akibat lintasan
yang berbentuk elips
K2 11.97 Perubahan jarak matahari ke bumi akibat
lintasan yang berbentuk elips Diurnal K1 23.93 Deklinasi sitem bulan dan matahari
O1 25.82 Deklinasi bulan
P1 24.07 Deklinasi matahari
Periode panjang
Mf 327.86 Varisai setengah bulanan
Mm 661.30 Variasi bulanan
Ssa 2191.43 Variasi semi tahunan
Perairan dangkal
2SM2 11.61 Interaksi bulan dan matahari
MNS2 13.13 Interaksi bulan dan matahari dengan perubahan
jarak matahari akibat lintasan berbentuk elips MK3 8.18 Interaksi bulan dan matahari dengan perubahan
jarak bulan akibat lintasan berbentuk elips M4 6.21 2x kecepatan sudut M2
MS4 2.20 Interaksi M2 dan S2 Sumber: Poerbandono dan Djunarsjah (2005)
Perbandingan amplitudo dan fase akibat perubahan posisi benda-benda langit tertentu pada pola pasang surut dinyatakan dengan konstanta-konstanta pembanding. Konstanta-konstanta ini disebut sebagai komponen harmonik pasang surut. Komponen harmonik pasang surut dinyatakan dengan simbol dan nilai tertentu untuk menjelaskan akibat atraksi gravitasi bulan atau matahari dengan kedudukan tertentu terhadap tinggi muka air (Poerbandono dan Djunarsjah, 2005). Komponen-komponen harmonik utama beserta periodenya dapat dilihat pada Tabel I.4.
I.5.6.2. Prediksi pasang surut Informasi tinggi muka laut di masa yang akan datang pada suatu lokasi tertentu dapat diketahui melalui prediksi pasang surut. Hasil prediksi ditampilkan dalam bentuk tabel-tabel berisikan keterangan jam dan tinggi muka air. Informasi prediksi pasang surut juga dapat ditampilkan dalam bentuk
co-tidal chart. Co-co-tidal chart dibangun dengan interpolasi dari beberapa stasiun
pengamat pasang surut. dari interpolasi terhadap tunggang atau keterlambatan fase pasang surut akan didapatkan co-range dan co-phase chart (Poerbandono dan Djunarsjah, 2005).
Prediksi pasang surut dilakukan dengan cara menurunkan komponen-komponen pasang surut dari data pasang surut dengan rentang pengamatan tertentu. Penentuan komponen-komponen pasang surut dilakukan melalui pendekatan analisis harmonik. Analisis harmonik biasa dilakukan dengan metode kuadrat terkecil. Nilai elevasi pasang surut dapat diturunkan melalui rumus prediksi elevasi pasang surut berikut (Basith, 2012):
η (t) = So + Sso + ∑ ... (I.2) keterangan:
η (t) : elevasi pasut terhadap fungsi waktu So : duduk tengah (mean sea level)
Sso : perubahan duduk tengah karena faktor meteorologis
Ai : amplitudo komponen ke-i
fi : faktor koreksi amplitudo konstituen pasut ke-i
ωi : 2π/Ti dengan Ti adalah periode konstituen pasut ke-i
Xi : argument astronomi konstituen pasut ke-i t : waktu
N : jumlah komponen pasut yang ditinjau Xi : Vi + Ui
Vi : fase dari konstituen ke-i pada jam 00:00 GMT
Ui : faktor koreksi yang tergantung pada node bulan (lunar)
I.5.7. Tidal Model Driver
Tidal Model Driver (TMD) merupakan suatu perangkat lunak yang digunakan
untuk melakukan permodelan pasang surut laut termasuk di dalamnya mengakses konstanta harmonik pasang surut dan melakukan prediksi pasang surut dengan
platform MATLAB. TMD dijalankan dengan menggunakan suatu model pasut yang
disediakan oleh OTIS (OSU Tidal Inversion Software).
TMD terdiri dari 2 komponen utama yaitu tampilan grafis (Graphical User
Interface/GUI) dan serangkaian script. GUI berguna bagi pengguna untuk
melakukan pemilihan area pasang surut. Script berguna untuk mengakses wilayah pasang surut dan melakukan prediksi pasang surut (Padman, 2005).
I.5.8. Garis Pantai
Garis pantai (shore line) adalah garis imaginer yang terbentuk dan merupakan batas air laut dan daratan dan garis ini berubah sesuai dengan kondisi pasang surut air laut. Garis pantai (Kongprom, 2011) perlu dipantai secara berkala dan perhatian khusus. Garis pantai dapat diperoleh dari proses interpretasi citra satelit ALOS PALSAR. Garis pantai yang diperoleh dari ekstraksi citra satelit ini sangat beragam sesuai dengan waktu perekaman citra satelit.
Cole (1997) menyatakan bahwa garis pantai adalah bentuk alam yang berubah secara dinamis dan lokasinya akan selalu berubah seiring dengan perubahan waktu. Garis pantai selalu berubah seiring dengan adanya abrasi, akresi and erosi. Penentuan garis pantai harus memperhatikan mengenai tingginya pasang dan surut air laut saat dilakukanya penentuan garis pantai itu sendiri.
Menurut Hutabarat dan Evans (1985) daerah peralihan antara daratan dan lautan sering ditandai dengan adanya suatu perubahan kedalaman yang
berangsur-angsur dan dikenal denganadanya tiga buah daerah, yaitu: continental shelf,
continental slope, continental rise.
I.5.9. Digitasi On Screen
Digitasi merupakan suatu proses yang dilakukan untuk mengubah format data dari raster menjadi vector. Digitasi secara on screen dilakukan dengan menggunakan perangkat lunak tertentu secara manual maupun otomatis. Data raster yang digunakan sebagai dasar dalam digitasi terlebih dahulu harus dipersiapkan mengenai sistem proyeksinya maupun luas area yang akan di-digitasi (Demers, 1999).
Hasil dari digitasi ini berupa informasi yang disimpan dalam bentuk layer dan dapat diolah untuk keperluan selanjutnya dalam format vector. Digitasi diperlukan untuk menghasilkan output garis pantai yang diinginkan dalam bentuk format vector dalam proyek ini.
I.5.10. Fungsi Trigonometri
Apabila diketahui sebuah bangun segitiga dengan salah satu sudutnya membentuk sudut 90o, maka terdapat fungsi trigonometri yang dapat digunakan untuk mendefinisikan panjang sisi-sisinya. Apabila diketahui sebuah bangun segitiga ABC seperti Gambar I.11 maka dapat dimiliki 6 buah fungsi trigonometri dari titik A (Corral, 2009).
Fungsi trigonometri dalam proyek ini diperlukan untuk penghiungan nilai lebar
intertidal pada wilayah pesisir Merauke. Kombinasi antara nilai derajad kemiringan
pesisir Merauke dan nilai rentang pasut di pesisir Merauke dapat digunakan untuk menentukan nilai lebar intertidal Merauke.
Gambar I.11 Bangun ABC
Fungsi trigonometri yang dimaksud antara lain:
1. Sin A = a/c ... (I.3) A B A C A a A b A c A
2. Cos A = b/c ... (I.4) 3. Tan A = a/b ... (I.5) 4. Csc A = c/a ... (I.6) 5. Sec A = c/b ... (I.7) 6. Cot A = b/a ... (I.8)
I.5.11. Penentuan Posisi Cara Numeris
Posisi suatu titik dapat ditentukan secara numeris apabila diketahui data berupa azimuth dan jarak. Apabila jarak antara titik A dan titik B diketahui (dAB), azimuth AB diketahui (αAB) dan koordinat titik A diketahui (XA, YA), maka posisi titik B dapat ditentukan dengan rumus (Basuki, 2006):
XB = XA + dAB sin αAB ... (I.9) YB = YA + dAB cos αAB ... (I.10)
Penentuan posisi titik-titik pembentuk garis pantai saat pasang dan surut dalam proyek ini dilakukan secara numeris dengan menggunakan dasar persamaan I.9 dan persamaan I.10 yang dimodifiksai. Titik-titik pembentuk garis pantai hasil ekstraksi sesaat digunakan sebagai titik pangkal sedangkan titik-titik pembentuk garis pantai saat pasang dan surut adalah nilai koordinat yang dicari.
I.5.12. Metode Penghitungan Luas
Luas suatu wilayah dapat ditentukan dengan berbagai macam metode. Metode yang digunakan disesuaikan dengan data yang dimiliki dan kesesuaian dengan bentuk daerah kajian. Beberapa metode pengukuran luas yang sering digunakan antara lain (Brinker dan Wolf, 1984):
1. Luas dengan membuat segitiga-segitiga. 2. Luas dengan simpangan garis lurus.
3. Luas dengan koordinat. Penghitungan luas dapat dilakukan apabila diketahui koordinat titik-titik sudut pembentuk suatu poligon. Apabila diketahui suatu bentuk bangun sembarang ABCDE (lihat Gambar I.11), maka luas dapat dihitung:
L = (XAYB + XBYC + XCYD + XDYE + XEYA – XBYA – XCYB – XDYC – XEYD – XAYE)/2 ... (I.11)
Gambar I.12 Ilustrasi bangun ABCDE A B A C D E X Y XA XE XB XD XC YB YA YC YE YD
29
BAB II
PELAKSANAAN
II.1. Persiapan
Perlu dilakukan penyiapan berupa perangkat keras, perangkat lunak, maupun bahan yang digunakan dalam pelaksanaan proyek ini. Bahan serta peralatan yang diperlukan dalam proyek ini, selanjutnya akan dijelaskan pada sub bab selanjutnya.
II.1.1. Perangkat keras
Proyek ini dilaksanakan dengan menggunakan perangkat keras berupa: 1. Laptop ASUS X42J
2. Flashdisk sebagai media pertukaran data 3. Satu unit printer
II.1.2. Perangkat lunak
Perangkat lunak yang digunakan dalam proyek ini berupa:
1. ENVI 5.0, digunakan dalam tahapan pemberian koreksi pada citra, pembentukan komposit warna pada citra, melakukan filtering pada citra, memotong citra. 2. Microsoft Office, digunakan untuk pembuatan atau penyusunan laporan dari
proyek ini dan mengelola data pasut serta hitungan koordinat garis pantai estimasi.
3. Global Mapper, digunakan untuk mengelola data SRTM dan melihat nilai kemiringan lereng dari area yang dijadikan studi
4. TMD, digunakan untuk melakukan prediksi nilai pasang surut pada daerah studi yang dijalankan dengan perangkat lunak Matlab.
5. AutoCAD 2009, digunakan untuk melakukan digitasi garis pantai serta penentuan nilai azimuth secara grafis.
6. ArcGIS 10, digunakan untuk melakukan penghitungan luas area intertidal dan pembuatan layout peta.