RANCANG BANGUN PENSTABIL TEGANGAN PADA GENERATOR SINKRON 3 PHASE AKIBAT FLUKTUASI BEBAN DENGAN METODE PI - FUZZY LOGIC CONTROLLER
Yuni Astrika Utami1, Ainur Rofiq Nansur2,Endro Wahjono3 1 Mahasiswa Jurusan Teknik Elektro Industri, 2,3 Dosen PENS-ITS
Politeknik Elektronika Negeri Surabaya Institut Teknologi Sepuluh Nopember Surabaya
Kampus ITS Sukolilo Surabaya 60111 Telp (+62) 031-59447280 .Fax (+62) 031-5946114
e-mail: [email protected]
ABSTRAK
Dalam suatu industri besar dipastikan mempunyai sumber tenaga listrik tambahan untuk menyuplai beban di industri tersebut. Sumber tenaga listrik tambahan tersebut diperoleh dari penggunaan generator. Jenis generator yang digunakan yaitu generator 3 phase. Jika generator digunakan pada beban berubah, diharapkan tegangan keluaran dari generator 3 phase tersebut tetap konstan meskipun terdapat perubahan beban.
Disini penulis akan merancang suatu alat yang dapat digunakan untuk menstabilkan tegangan output generator pada saat ada perubahan beban. Proses penstabilan tegangan keluaran dari generator dilakukan dengan cara mengatur tegangan eksitasi. Tegangan eksitasi diatur dengan memakai semiconverter terkontrol 1 fasa dengan menggunakan IC TCA785 sebagai pengontrol sudut penyulutan.
Pengontrolan dari driver TCA itu sendiri menggunakan PI – FUZZY Logic Controller agar perubahan tegangan keluaran dari generator dapat di atur lebih teliti kembali ke setting point awal 380V dengan error dari set point sebesar ±5% dari set point.
Kata kunci : Generator sinkron 3 phasa, Semiconverter Terkontrol 1 fasa, PI – FUZZY Controller
1. PENDAHULUAN
Generator merupakan alat penghasil tenaga listrik yang dihasilkan dari perubahan energi gerak menjadi energi listrik. Dimana tenaga listrik tersebut digunakan sebagai sumber tegangan untuk menyuplai beban, baik beban tetap maupun beban berubah. Dimana perubahan beban tersebut memberikan efek yang dapat mempengaruhi tegangan keluran dari generator. Perubahan tegangan keluaran generator dipengaruhi oleh perubahan arus eksitasi pada kumparan medan. Yang mana nantinya tegangan keluaran generator akan berubah seiring perubahan arus eksitasi pada kumparan medan. Oleh karena itu di buat suatu alat yang bisa digunakan untuk menaikkan atau menurunkan arus eksitasi generator, sehinggga tegangan keluaran generator akan tetap konstan meskipun dalam keadaan beban tetap maupun beban berubah.
Alat ini dinamakan AVR (Automatic Voltage Regulator). Metode yang digunakan sebagai kontrol alat ini adalah PI-FUZZY logic controller.
2. KONFIGURASI SISTEM
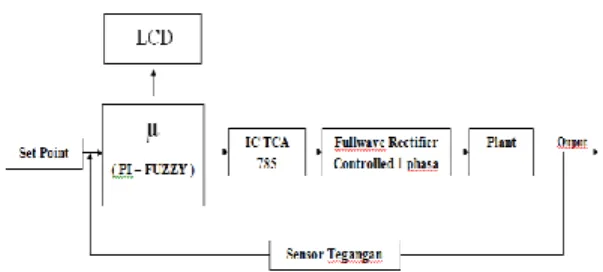
Gambaran umum dari prinsip kerja penstabil tegangan rancang bangun penstabil tegangan pada generator sinkron 3 phase akibat fluktuasi beban dengan PI – FUZZY ditunjukkan pada gambar 3.1.
Gambar 2.1 Konfigurasi Sistem Kontrol Dari gamabar diatas dapat diketahui bahwa Mikrokontroller yang berisi program PI-FUZZY terhubung dengan tampilan dari LCD, ADC, dan DAC. Fungsi dari DAC adalah untuk mengkonversi data analog dari pembacaan sensor tegangan menjadi data digital sebagai input dari mikrokontroller. DAC berfungsi untuk
mengubah data digital menjadi data analog yang digunakan untuk tegangan input IC TCA 785.
2.1. Perencanaan Perangkat Lunak. Pembuatan perangkat lunak ( software ) pada tugas akhir ini meliputi bagian program untuk ADC, DAC R2R , LCD , serta pembuatan program PI-FUZZY sebagai kontroller.
2.1.1 Perencanaan dan Pembuatan Program ADC
Mikrokontroler ATmega16 mempunyai internal ADC yang digunakan untuk menkonversi data analog dari masukan sensor tegangan tegangan menjadi data digital dalam bentuk heksadesimal. Data ini nantinya akan diolah dalam program sebagai mesukan dari sistem logika fuzzy. ADC yang dipakai pada tugas akhir ini adalah DAC 8 bit (255), dapat ditentukan hasil konversi ADC melalaui rumusan sebagai berikut ini.
2.1.2 Perencanaan dan pembuatan hardware dan program LCD
Pada proyek akhir ini LCD digunakan sebagai tampilan dari tegangan output dari keluaran generator. LCD yang digunakan adalah jenil Liquid Cristal 16 x 2.
Gambar 2.1 Rangkaian LCD 2x16
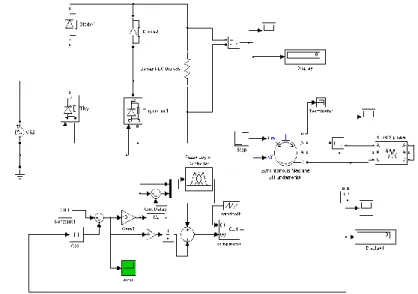
2.1.2 Perancangan PI-FUZZY
Gambar 2.1 Simulasi Eksitasi Generator 2.1.2 Membership Function Error
Dari gambar 2.2, range nilai yang digunakan ditunjukkan pada tabel 3.1
Tabel 2.1 Range nilai membership function error
MF NBe Nse Ze PSe PBe Nilai -20 -10 0 10 20
2.1.3 Membership Function Delta Error
Gambar 2.3 Membership Function delta error Dari gambar 2.3, range nilai yang digunakan ditunjukkan pada tabel 2.2 :
Tabel 2.2 Range nilai membership function delta error
MF NBde NSde Zde PSde PBde Nilai -10 -5 0 5 10
Sedangkan untuk gambar membership function output ditunjukkan pada gambar 2.4 dan range nilai membership function ditunjukkan pada tabel 2.3
Gambar 2.4 Membership Function output Tabel 2.4 Range nilai membership function delta
error
MF NBde NSde Zde PSde PBde Nilai 0.43 0.86 1.29 1.72 2.15
Setelah dibuat membership function maka dapat dibuat rule basenya untuk mengatur logika pembuatan keputusan fuzzynya atau aturan yang menghubungkan antara input dan outputnya seperti yang ditunjukkan pada tabel 3.4 dibawah ini :
Tabel 3.4 Rule base
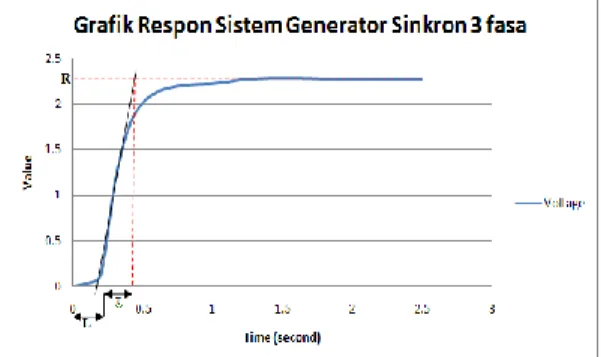
Dari hasil pengambilan data respon generator dengan menggunakan ADAM 5000 di peroleh grafik seperti pada gambar 2.5 dibawah ini.
Gambar 2.5 Grafik Respon Sistem Generator Sinkron 3 fasa
Dari gambar grafik 2.5 dapat diperoleh nilai KP dan Ki dengan perhitungan menggunakan metode zigler nicolz sebagai berikut :
Dari hasil perhitungan diatas kemudian dilakukan tuning nilai Kp dan Ki. Pada program besarnya nilai Kp merupakan outputan dari fuzzy. Penyusunan dari logika PI-FUZZY dapat dilihat pada gambar 2.6 seperti dibawah ini.
Gambar 3.12 Logika PI-FUZZY
de\e NBe NSe Ze PSe PBe
NBde NB NB NB NS ZE
NSde NB NS NS ZE PS
Zde NB NS ZE ZE PB
PSde NS ZE PS PS PB
3. PENGUJIAN DAN ANALISA
3.1. Pengujian ADC ( Analog to Digital Converter )
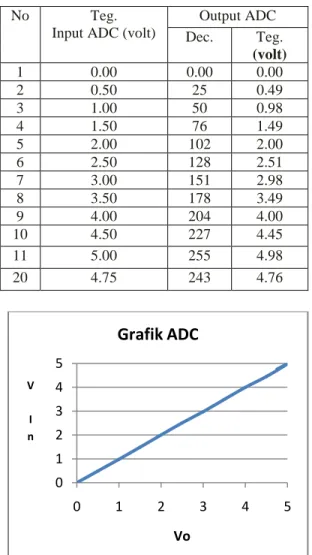
Dalam pengujian program ADC dan DAC bertujuan untuk mencoba program pengambilan data melalui ADC dan ketelitian program ADC tersebut untuk mengkonversi data analog menjadi data digital. Pengujian ini dilakukan dengan cara memberikan masukan pada ADC internal mikrokontroler ATmega16 pada channel nol berupa tegangan analog dengan nilai maksimal sama dengan Vreff yaitu sebesar 5 Volt DC. Tegangan analog berasal dari keluaran sensor tegangan menggunakan rangkaian potensiometer yang berfungsi untuk mengatur level tegangan analog yang masuk ke Port ADC channel 0.
Tabel 3.1 Hasil pengujian ADC ( Analog to Digital Converter )
No Teg. Input ADC (volt)
Output ADC Dec. Teg. (volt) 1 0.00 0.00 0.00 2 0.50 25 0.49 3 1.00 50 0.98 4 1.50 76 1.49 5 2.00 102 2.00 6 2.50 128 2.51 7 3.00 151 2.98 8 3.50 178 3.49 9 4.00 204 4.00 10 4.50 227 4.45 11 5.00 255 4.98 20 4.75 243 4.76
Gambar 3.1 Grafik Hasil pengujian ADC
3.2 Pengujian DAC ( Digital to Analog Converter )
Pengujian DAC bertujuan untuk mengkonversi data digital dari mikrokontroller menjadi data analaog sebagai input dari TCA785. Tegangan keluaran dari DAC dengan range 0 – 5V dikuatkan 3x menjadi 0 – 15V, penguatan tegangan DAC ini bertujuan untuk memperoleh tegangan yang sesuai sebagai input IC TCA785. Pada tabel 3.2 dan tabel 3.3 menunjukkan data hasil pengujian DAC tanpa penguatan dan dengan penguatan.
Gambar 3.2Rangkaian R-2R
Gambar 3.3 Grafik DAC Tanpa Penguatan
Dari grafik diatas dapat kita ketahui bahwa tegangan output secara teori linier terhadap data tegangan output secata praktek, hal ini menunjukkan bahwa rangkaian sudah bisa bekerja dengan baik.
0 1 2 3 4 5 0 1 2 3 4 5 V I n Vo
Grafik ADC
0 1 2 3 4 5 0 1 2 3 4 5 V o u t p r a k t e k V_out TeoriTabel 3.2 Hasil pengujian DAC Tanpa Penguatan
Gambar 3.4 Grafik DAC Dengan Penguatan 3.3 Pengujian Rangkaian Keseluruhan
Pada pengujian ini dilakukan pengujian plant secara close loop, dimana pada percobaan ini tegangan output diharapkan dapat tetap konstan pada saat beban berubah, perubahan tegangan tersebut harus berubah secara otomatis sesuai dengan program yang ada pada alat tersebut. Beban yang digunakan pada percobaan ini yaitu RL load 3 fasa dengan memakai 5x step yang mempunyai daya maksimum 1,435Kw. Pada tabel 4.4.1 akan ditampilkan data dari hasil pengujian secara closeloop dengan range beban mulai dari 0x step sampai 5x step.
Tabel 3.3. Tabel Hasil Pengujian Closeloop
Gambar 3.5 Pengujian Tegangan Output tanpa Beban
Gambar 3.6 Pengujian Tegangan Output Beban 196,67 W 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 v_out teori
Grafik DAC dengan penguatan 3x
0 2 4 6 0 5 10 15 V o u t p u t TimeSampling (ms)
Respon Tegangan output Tanpa Beban 0 5 0 5 10
V
o
u
t
p
…
TimeSampling(ms)
Grafik respon tegangan outputbeban 196,67 W Input DAC Tegangan Output Praktek ( Volt ) Tegangan Output Teori ( Volt ) 0000 0000 0 0 0000 0001 0.06 0.0588 0000 0011 0.18 0.1764 0000 0111 0.42 0.4116 0000 1111 0.88 0.882 0001 1111 1.82 1.8228 0011 1111 3.71 3.7044 0111 1111 7.46 7.4676 1111 1111 15.05 15 BEB AN Vout Generat or (Vac) Time (S) Arus Eksita si (A) Vout Eksitasi (Vdc) Arus Beban (A) DAYA (W) 1 378,5 2.08 1,26 51 0,3 196,67 2 378 3.58 1,28 52 0,75 491,04 3 377,4 4.47 1,3 53 1,25 817,1 4 377,6 1.42 1,325 55 1,7 1110 5 377,6 3.86 1,35 55 2,2 1435 4 376,9 1.66 1,32 55 1,67 1097 3 377,8 2.89 1,29 52 1.26 823,2 2 377,8 2.24 1,25 51,9 0.73 488,1 1 379,1 2.14 1,25 51,9 0.32 200,1 0 381 1.11 1,2 51 0 0
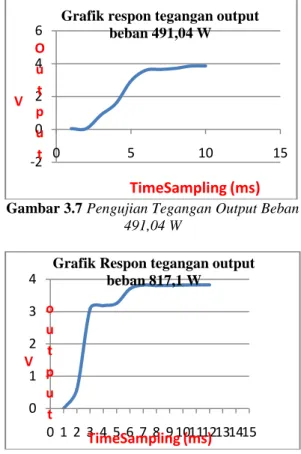
Gambar 3.7 Pengujian Tegangan Output Beban 491,04 W
Gambar 3.8 Pengujian Tegangan Output Beban 817,1 W
Gambar 3.9 Pengujian Tegangan Output Beban 1,11Kw
Gambar 3.10 Pengujian Tegangan Output Beban 1.435 Kw
3.4 KESIMPULAN
Dari perencanaan dan pembuatan sistem kemudian dilakukan pengujian software dan beberapa analisa dari metode yang digunakan ternyata dapat disimpulkan beberapa hal sebagai berikut :
1. Waktu untuk mencapai tegangan konstan pada tugas akhir ini masih relatif lama yaitu mencapai 5s, untuk mempercepat waktu tersebut dapat dilakukan dengan memperbesar nilai Kp.
2. Kepresisian antara tegangan output generator adalah ±5% dari nilai setpoint tegangan konstan 380V.
3. Pada kontrol PI-FUZZY sangat sensitif terhadap perubahan beban sehingga kontroller akan bekerja maksimum hanya pada daerah range error yang telah di tentukan.
3.5 Saran
Dengan pengaturan arus medan tersebut diharapkan agar dapat mengoptimalkan kerja dari generator 3Ф dengan energi (arus) seminimal mungkin atau tetap menjaga supaya kecepatan pada motor tetap konstan dan juga dengan pengaturan pada arus torsi diharapkan mampu memperbaiki overshoot pada saat start awal. Untuk pengembangan lebih lanjut hendaknya perlu diperhatikan hal-hal sebagai berikut :
1. Pada proses kontrol diperlukan suatu sensor dengan performa yang baik, sehingga dapat memberikan respon yang baik pula. Untuk pengembangan lebih lanjut penulis berharap digunakan sensor dengan performa yang baik dan stabil.
2. Membershup function dari output diharapkan dapat di buat lebih banyak agar tuning dari output akan lebih halus.
3. Untuk perhitungan nilai Kp dan Ki sebaiknya memakai lebih dari satu metode, sehingga nantinya dari hasil kedua metode tersebut dapat dibandingkan dan dipilih nilai yang paling pas.
4. Sebaiknya menggunakan sensor tambahan seperti sensor arus sebagai pengaman ketika terjadi overload. -2 0 2 4 6 0 5 10 15 V O u t p u t
TimeSampling (ms)
Grafik respon tegangan output beban 491,04 W 0 1 2 3 4 0 1 2 3 4 5 6 7 8 9 101112131415 V o u t p u t TimeSampling (ms) Grafik Respon tegangan output
beban 817,1 W 0 2 4 6 0 1 2 3 4 5 6 7 8 9 10 11 12 13
v
o
u
t
p
…
TimeSampling (ms)
Grafik Respon tegangan outputbeban 1.11 KW -2 0 2 4 6 0 1 2 3 4 5 6 7 8 9 10111213141516 V o u t p u t Timesampling (ms) Grafik Respon tegangan output
3.6 DAFTAR PUSTAKA
[1.] Sumanto,MA, “Mesin Arus Searah”, Andi Offset, Yogyakarta, 2001 [2.] D. Petruzella, Frank, ”Elektronik
Industri”, Andik, Yogyakarta, 2001 [3.] Susanto, A.T., ”Implementasi Buck
Converter Dan Sensor Hall Effect Pada Kursi Roda Elektrik Delengkapi Dengan Autobreak System Berbasis Fuzzy Logic Controller” Tugas Akhir, Politeknik Elektronika Negeri Surabaya, 2007
[4.] D.kaehler, Steven, ”FUZZY LOGIC-AN INTRODUCTION”
[5.] Sudjarwadi, Y. D., ”Aplikasi Pengendali Logika Fuzzy Pada Sistem Permukaan Air Berbasis Mikrokontroler AT89C51”, Tugas Akhir, Universitas Gadjah Mada, Yogyakarta, 2002
[6.] Hudallah, N., ”Kendali Logika Fuzzy Untuk Mengatur Kecepatan Motor DC Tinjauan Pada Pengaruh Penalaan Fungsi Keanggotaan”, Thesis, Universitas Gadjah Mada, Yogyakarta, 2002
[7.] Oghata Katsuhiko, ”Modern Control Engineering”, Practice Hall International, 2002
[8.] Chairuzzani dkk, ”Kontroler”, Penerbit Erlangga, 1998