ABSTRAK
Penelitian yang intensif dalam bidang pengolahan sinyal menyebabkan
teknologi komunikasi berkembang sangat pesat, salah satunya adalah pengenalan
suara. Konsep pengenalan suara dapat diterapkan dalam beberapa bidang untuk
menyelesaikan beberapa permasalahan, diantaranya yaitu pengenalan suara mesin
sepeda motor. Terdapat berbagai macam pola suara mesin sepeda motor yang dapat
menunjukkan jenis kerusakan dari mesin sepeda motor. Masih banyak masyarakat
pengguna sepeda motor yang tidak mengerti kerusakan yang terjadi pada mesin
sepeda motor. Dalam melakukan pengecekan dan perawatan mesin sepeda motor,
para teknisi bengkel sering kali lebih cepat mengetahui kerusakan yang terjadi pada
sebuah mesin sepeda motor hanya dengan mendengar suara mesin sepeda motor
tersebut. Oleh karena itu, pada penelitian ini akan dibuat sebuah aplikasi yang
mampu untuk mengklasifikasikan suara mesin sepeda motor berdasarkan suara
mesinnya.
Penelitian ini menggunakan fitur Linear Predictive Coding untuk proses
ekstraksi ciri suara dan metode Jaringan Syaraf Tiruan Back Propagation untuk
proses klasifikasi suara. Untuk jenis klasifikasi suara mesin sepeda motor dibagi
kedalam 4 kelompok yaitu mesin normal, mesin rusak katup/klep, mesin rusak
stang seher, dan mesin rusak rantai kamprat. Data yang akan digunakan adalah data
rekaman suara mesin sepeda motor dalam format .wav. Jumlah file rekaman suara
yang digunakan dalam proses mendapatkan pola suara sebanyak 200 data suara.
Berdasarkan percobaan pengujian variasi kombinasi ciri dan jumlah hidden
layer beserta jumlah neuron-nya, diperoleh hasil penelitian optimal yaitu akurasi
tertinggi sebesar 84% pada ciri orde 10 dengan 2 hidden layer, dengan jumlah
neuron pada hidden layer 1 sebanyak 28 dan jumlah neuron pada hidden layer 2
sebanyak 20.
Kata Kunci: Klasifikasi, Linear Predictive Coding, Jaringan Syaraf Tiruan Back
ABSTRACT
Intensive research in the field of signal processing causes communication
technology is growing very rapidly, one of which is the voice recognition. The
concept of voice recognition can be applied in several fields to resolve some
problems, among which is the voice recognition engine motorcycles. There are
various kind of motorcycle engine sound patterns that can indicate the type of
damage from a motorcycle engine. There are still many people who use motorcycles
do not understand the damage that occurs in a motorcycle engine. While checking
and maintenance the motorcycle engine, the technicians often more quickly find
damage to a motorcycle engine only from hearing the sound of a motorcycle engine.
Therefore, in this study will be made an application that is able to classify the sound
of motorcycle engine based on the engine sounds.
This study uses Linear Predictive Coding feature for feature extraction
process sound and method Back Propagation Neural Network for sound
classification process. For this type of motorcycle engine sound classification is
divided into 4 groups: normal machinery, machine broken valve, piston handlebar
broken machines and broken machines timing chain. The data of motorcycle engine
sound recordings will be used in .wav format. The number of voice recording files
used in the process of getting sound patterns as many as 200 voice data.
Based on the test trial variation combination of features and the number of
hidden layer along with the number of it neurons, the result of research is optimal
that the highest accuracy is 84% on the characteristic of order is 10 with two hidden
layers, the number of neurons in the hidden layer 1 is 28 and the number of neurons
in the hidden layer 2 is 20.
Keywords: Classification, Linear Predictive Coding, Back Propagation Neural
i
IDENTIFIKASI KERUSAKAN MESIN SEPEDA MOTOR BERDASARKAN SUARA MESIN MENGGUNAKAN FITUR LINEAR
PREDICTIVE CODING DAN METODE BACK PROPAGATION HALAMAN JUDUL
SKRIPSI
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Komputer Program Studi Teknik Informatika
Oleh:
Yosep Dio Dewantara 115314049
PROGRAM STUDI TEKNIK INFORMATIKA JURUSAN TEKNIK INFORMATIKA FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA YOGYAKARTA
ii
DAMAGE IDENTIFICATION OF MOTORCYCLE ENGINES BASED ON ENGINE NOISE USING LINEAR PREDICTIVE CODING
FEATURES AND BACK PROPAGATION METHOD TITLE PAGE
A THESIS
Presented as Partial Fulfillment of Requirements to Obtain Sarjana
Komputer Degree in Informatics Engineering Department
By:
Yosep Dio Dewantara 115314049
INFORMATICS ENGINEERING STUDY PROGRAM INFORMATICS ENGINEERING DEPARTMENT
FACULTY OF SCIENCE AND TECHNOLOGY SANATA DHARMA UNIVERSITY
v MOTTO
“Bangsa yang malas belajar, tidak akan bisa berkembang”
“Banyak kegagalan dalam hidup ini dikarenakan orang-orang tidak menyadari
betapa dekatnya mereka dengan keberhasilan saat mereka menyerah”
vi
PERNYATAAN KEASLIAN KARYA
Saya menyatakan dengan sesungguhnya bahwa di dalam skripsi yang saya
tulis ini tidak memuat karya atau bagian karya orang lain, kecuali yang telah
disebutkan dalam kutipan dan daftar pustaka, sebagaimana layaknya karya ilmiah.
Yogyakarta, 23 November 2016
Penulis
vii
LEMBAR PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma:
Nama : Yosep Dio Dewantara
NIM : 115314049
Demi pengembangan ilmu pengetahuan, saya memberikan kepada
Perpustakaan Universitas Sanata Dharma karya ilmiah yang berjudul:
IDENTIFIKASI KERUSAKAN MESIN SEPEDA MOTOR BERDASARKAN SUARA MESIN MENGGUNAKAN FITUR LINEAR
PREDICTIVE CODING DAN METODE BACK PROPAGATION
Berserta perangkat yang diperlukan (bila ada). Dengan demikian saya
memberikan kepada perpustakaan Universitas Sanata Dharma hak untuk
menyimpan, mengalihkan dalam bentuk media lain, mengelolanya dalam bentuk
pangkalan data mendistribusikan secara terbatas, dan mempublikasikannya di
internet atau media lain untuk kepentingan akademis tanpa perlu meminta ijin dari
saya maupun memberikan royalti kepada saya selama tetap mencantumkan nama
saya sebagai penulis.
Demikian pernyataan ini saya buat dengan sebenarnya.
Yogyakarta, 23 November 2016
Penulis
viii ABSTRAK
Penelitian yang intensif dalam bidang pengolahan sinyal menyebabkan
teknologi komunikasi berkembang sangat pesat, salah satunya adalah pengenalan
suara. Konsep pengenalan suara dapat diterapkan dalam beberapa bidang untuk
menyelesaikan beberapa permasalahan, diantaranya yaitu pengenalan suara mesin
sepeda motor. Terdapat berbagai macam pola suara mesin sepeda motor yang
dapat menunjukkan jenis kerusakan dari mesin sepeda motor. Masih banyak
masyarakat pengguna sepeda motor yang tidak mengerti kerusakan yang terjadi
pada mesin sepeda motor. Dalam melakukan pengecekan dan perawatan mesin
sepeda motor, para teknisi bengkel sering kali lebih cepat mengetahui kerusakan
yang terjadi pada sebuah mesin sepeda motor hanya dengan mendengar suara
mesin sepeda motor tersebut. Oleh karena itu, pada penelitian ini akan dibuat
sebuah aplikasi yang mampu untuk mengklasifikasikan suara mesin sepeda motor
berdasarkan suara mesinnya.
Penelitian ini menggunakan fitur Linear Predictive Coding untuk proses
ekstraksi ciri suara dan metode Jaringan Syaraf Tiruan Back Propagation untuk
proses klasifikasi suara. Untuk jenis klasifikasi suara mesin sepeda motor dibagi
kedalam 4 kelompok yaitu mesin normal, mesin rusak katup/klep, mesin rusak
stang seher, dan mesin rusak rantai kamprat. Data yang akan digunakan adalah
data rekaman suara mesin sepeda motor dalam format .wav. Jumlah file rekaman
suara yang digunakan dalam proses mendapatkan pola suara sebanyak 200 data
suara.
Berdasarkan percobaan pengujian variasi kombinasi ciri dan jumlah hidden
layer beserta jumlah neuron-nya, diperoleh hasil penelitian optimal yaitu akurasi
tertinggi sebesar 84% pada ciri orde 10 dengan 2 hidden layer, dengan jumlah
neuron pada hidden layer 1 sebanyak 28 dan jumlah neuron pada hidden layer 2
sebanyak 20.
Kata Kunci: Klasifikasi, Linear Predictive Coding, Jaringan Syaraf Tiruan Back
ix ABSTRACT
Intensive research in the field of signal processing causes communication
technology is growing very rapidly, one of which is the voice recognition. The
While checking and maintenance the motorcycle engine, the technicians often
more quickly find damage to a motorcycle engine only from hearing the sound of
a motorcycle engine. Therefore, in this study will be made an application that is
able to classify the sound of motorcycle engine based on the engine sounds.
This study uses Linear Predictive Coding feature for feature extraction
process sound and method Back Propagation Neural Network for sound
classification process. For this type of motorcycle engine sound classification is
divided into 4 groups: normal machinery, machine broken valve, piston handlebar
broken machines and broken machines timing chain. The data of motorcycle
engine sound recordings will be used in .wav format. The number of voice
recording files used in the process of getting sound patterns as many as 200 voice
data.
Based on the test trial variation combination of features and the number of
hidden layer along with the number of it neurons, the result of research is optimal
that the highest accuracy is 84% on the characteristic of order is 10 with two
hidden layers, the number of neurons in the hidden layer 1 is 28 and the number
of neurons in the hidden layer 2 is 20.
Keywords: Classification, Linear Predictive Coding, Back Propagation Neural
x
KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Esa, sehingga
penulis dapat menyelesaikan tugas akhir dengan judul “Identifikasi Kerusakan Mesin Sepeda Motor Berdasarkan Suara Mesin Menggunakan Fitur Linear
Predictive Coding dan Metode Back Propagation”. Tugas akhir ini merupakan
salah satu mata kuliah wajib dan sebagai syarat akademik untuk memperoleh
gelar sarjana komputer program studi Teknik Informatika Universitas Sanata
Dharma Yogyakarta.
Pada kesempatan ini, penulis ingin mengucapkan terima kasih kepada
pihak-pihak yang telah membantu penulis baik selama penelitian maupun saat
mengerjakan tugas akhir ini. Ucapan terima kasih sebesar-besarnya penulis
sampaikan kepada:
1. Tuhan Yang Maha Esa, yang telah memberikan pertolongan dan kekuatan
dalam proses pembuatan tugas akhir.
2. Orang tua, Fransiskus Xaverius Suprapto dan Fransiska Yohanna Layola
Manik, serta keluarga yang telah memberikan dukungan spiritual dan
material.
3. Dr. Cyprianus Kuntoro Adi, SJ., M.A., M.Sc. selaku dosen pembimbing
tugas akhir, atas bimbingan, waktu dan saran yang telah diberikan kepada
penulis.
4. JB. Budi Darmawan S.T., M.Sc. selaku dosen pembimbing akademik, atas
bimbingan, kritik dan saran yang telah diberikan kepada penulis.
5. Dr. Anastasia Rita Widiarti M.Kom selaku ketua program studi Teknik
Informatika, atas bimbingan, kritik dan saran yang telah diberikan kepada
penulis.
6. Sudi Mungkasi, S.Si., M.Math.Sc., Ph.D. selaku dekan fakultas Sains dan
Teknologi, atas bimbingan, kritik dan saran yang telah diberikan kepada
penulis.
7. Seluruh dosen Teknik Informatika atas ilmu yang telah diberikan semasa
xi
8. Pemilik Bengkel Rejo, Mas Wawan, dan Mas Cuweng selaku pemilik
bengkel sepeda motor atas bantuannya terhadap penulis dalam
mengumpulkan data untuk penelitian ini serta membantu memberi informasi
yang dibutuhkan dalam penelitian ini.
9. Mas Yanuar, Mas Susilo dan Mas Danang selaku laboran Teknik
Informatika, atas bantuannya menyediakan tempat untuk mengerjakan tugas
akhir.
10. Bagus, Rio, Beny, Valen, Rifki, Agung, Be, Priska, Lukas, Tea, Kevin,
Dion dan teman-teman lainnya yang telah berjuang bersama serta saling
memberi dukungan semangat, doa dalam menyelesaikan penelitian ini.
11. Teman-teman Teknik Informatika 2011 Sanata Dharma, terima kasih atas
semangat dan perjuangan bersama yang telah kalian berikan kepada satu
sama lain.
12. Teman-temanku selain dari prodi TI, terima kasih atas dukungan yang telah
kalian berikan.
13. Semua pihak yang tidak dapat disebutkan satu per satu yang telah
membantu penulis dalam pengerjaan tugas akhir ini.
Penulis menyadari masih banyak kekurangan yang terdapat dalam laporan
tugas akhir ini. Saran dan kritik sangat diharapkan untuk hasil yang lebih baik di
masa mendatang. Akhir kata, penulis berharap tulisan ini dapat berguna bagi
perkembangan ilmu pengetahuan dan wawasan pembaca.
Penulis,
xii DAFTAR ISI
1
HALAMAN JUDUL ...i
TITLE PAGE ... ii
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
MOTTO ... v
PERNYATAAN KEASLIAN KARYA ... vi
LEMBAR PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
ABSTRAK ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR TABEL ... xiv
DAFTAR GAMBAR ... xvi
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Rumusan Masalah ... 3
1.3 Tujuan ... 3
1.4 Batasan Masalah ... 4
1.5 Sistematika Penulisan ... 4
BAB II LANDASAN TEORI ... 6
2.1 Mesin Sepeda Motor ... 6
2.1.1 Kondisi Mesin Sepeda Motor Berdasarkan Suara ... 7
2.2 Daftar Istilah Resmi Dalam Mesin Sepeda Motor ... 11
2.3 Audio/Suara ... 12
2.4 Ekstraksi Ciri Sinyal Suara ... 13
xiii
2.5 Jaringan Syaraf Tiruan ... 16
2.5.1 Jaringan Syaraf Tiruan Propagasi Balik / Back Propagation ... 18
2.6 K-Fold Cross Validation ... 24
2.7 Confusion Matrix ... 24
BAB III METODOLOGI PENELITIAN ... 26
3.1 Data ... 26
3.2 Perancangan Sistem ... 31
3.2.1 Ekstraksi Ciri ... 32
3.2.2 Pelatihan dan Pengujian Arsitektur JST ... 36
3.2.3 Klasifikasi dan Uji Data Tunggal ... 42
3.3 Kebutuhan Sistem ... 43
3.4 Perancangan Atarmuka Sistem ... 44
BAB IV IMPLEMENTASI DAN ANALISIS HASIL ... 47
4.1 Implementasi Sistem ... 47
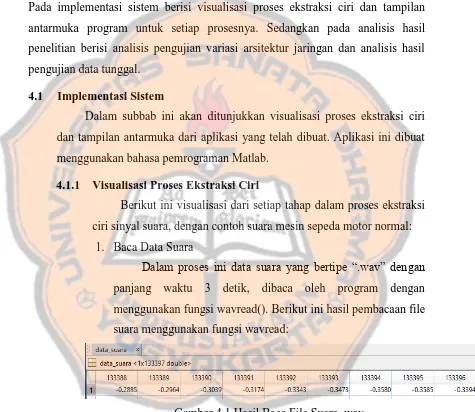
4.1.1 Visualisasi Proses Ekstraksi Ciri ... 47
4.1.2 Tampilan Antarmuka Aplikasi ... 54
4.2 Analisis Hasil Penelitian ... 58
4.2.1 Pengujian Variasi Arsitektur Jaringan ... 58
4.2.2 Pengujian Data Tunggal ... 94
BAB V PENUTUP ... 95
5.1 Kesimpulan ... 95
5.2 Saran ... 95
DAFTAR PUSTAKA ... 96
xiv
DAFTAR TABEL
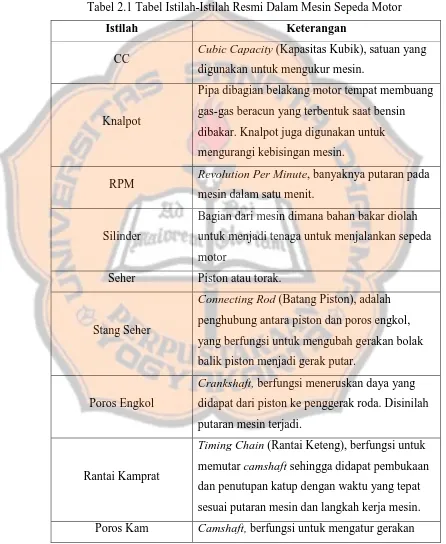
Tabel 2.1 Tabel Istilah-Istilah Resmi Dalam Mesin Sepeda Motor ... 11
Tabel 2.2 Confusion Matrix 2 Kelas (Tan, Steinbach, & Kumar, 2006) ... 25
Tabel 3.1 Tabel Jumlah Data Hasil Ekstraksi Ciri ... 36
Tabel 3.2 Five-Fold Cross Validation ... 37
Tabel 3.3 Jumlah Data Input Arsitektur Jaringan ... 40
Tabel 4.1 Hasil Akurasi Seluruh Percobaan Pengujian ... 60
Tabel 4.2 Confusion Matrix Percobaan Pengujian Orde 10, Jumlah Neuron
Tabel 4.9 Hasil Akurasi Orde 10, Hidden Layer 1 ... 70
Tabel 4.10 Hasil Akurasi Orde 10, Hidden Layer 2 ... 71
Tabel 4.11 Hasil Akurasi Orde 10+, Hidden Layer 1 ... 72
Tabel 4.12 Hasil Akurasi Orde 10+, Hidden Layer 2 ... 73
Tabel 4.13 Hasil Akurasi Orde 10++, Hidden Layer 1 ... 74
Tabel 4.14 Hasil Akurasi Orde 10++, Hidden Layer 2 ... 75
Tabel 4.15 Hasil Akurasi Orde 12, Hidden Layer 1 ... 76
Tabel 4.16 Hasil Akurasi Orde 12, Hidden Layer 2 ... 77
Tabel 4.17 Hasil Akurasi Orde 12+, Hidden Layer 1 ... 78
Tabel 4.18 Hasil Akurasi Orde 12+, Hidden Layer 2 ... 79
Tabel 4.19 Hasil Akurasi Orde 12++, Hidden Layer 1 ... 80
Tabel 4.20 Hasil Akurasi Orde 12++, Hidden Layer 2 ... 81
Tabel 4.21 Hasil Akurasi Orde 14, Hidden Layer 1 ... 82
Tabel 4.22 Hasil Akurasi Orde 14, Hidden Layer 2 ... 83
Tabel 4.23 Hasil Akurasi Orde 14+, Hidden Layer 1 ... 84
Tabel 4.24 Hasil Akurasi Orde 14+, Hidden Layer 2 ... 85
Tabel 4.25 Hasil Akurasi Orde 14++, Hidden Layer 1 ... 86
Tabel 4.26 Hasil Akurasi Orde 14++, Hidden Layer 2 ... 87
Tabel 4.27 Hasil Akurasi Orde 16, Hidden Layer 1 ... 88
Tabel 4.28 Hasil Akurasi Orde 16, Hidden Layer 2 ... 89
xv
Tabel 4.30 Hasil Akurasi Orde 16+, Hidden Layer 2 ... 91
Tabel 4.31 Hasil Akurasi Orde 16++, Hidden Layer 1 ... 92
Tabel 4.32 Hasil Akurasi Orde 16++, Hidden Layer 2 ... 93
xvi
DAFTAR GAMBAR
Gambar 2.1 Blok Silinder (Sutiman & Solikin, 2005) ... 6
Gambar 2.2 Mesin Sepeda Motor (Sutiman & Solikin, 2005) ... 8
Gambar 2.3 Batang Piston/Stang Seher (Sutiman & Solikin, 2005)... 9
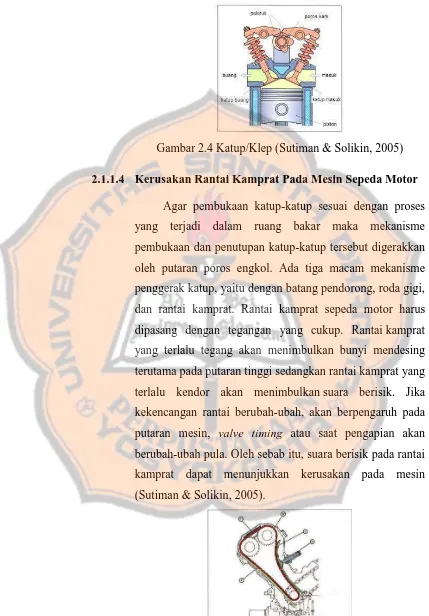
Gambar 2.4 Katup/Klep (Sutiman & Solikin, 2005)... 10
Gambar 2.5 Rantai Kamprat (Sutiman & Solikin, 2005) ... 10
Gambar 2.6 frame blocking (Khrisnadi, 2005) ... 14
Gambar 2.7 Ilustrasi Arsitektur Jaringan Lapis Tunggal (Siang, 2005) ... 17
Gambar 2.8 Ilustrasi Arsitektur Jaringan Lapis Majemuk (Siang, 2005) ... 18
Gambar 2.9 Ilustrasi Arsitektur Back Propagation (Siang, 2005) ... 19
Gambar 3.1 Proses Perekaman Suara Mesin Sepeda Motor ... 27
Gambar 3.2 Contoh Sinyal dan Spektrogram Suara Mesin Sepeda Motor Normal ... 28
Gambar 3.6 Diagram Blok Sistem ... 32
Gambar 3.7 Diagram Blok Proses Ekstraksi Ciri... 33
Gambar 3.8 Arsitektur JST 1 Hidden Layer ... 38
Gambar 3.9 Arsitektur JST 2 Hidden Layer ... 39
Gambar 3.10 Proses Klasifikasi dan Uji Data Tunggal ... 42
Gambar 3.11 Tampilan Antarmuka Sistem ... 44
Gambar 4.1 Hasil Baca File Suara .wav ... 47
Gambar 4.2 Grafik Sinyal Data Suara Setelah Fungsi wavread() ... 48
Gambar 4.3 Data Hasil Proses Frame Blocking ... 48
Gambar 4.4 Grafik Sinyal Data Hasil Proses Frame Blocking ... 49
Gambar 4.5 Data Hasil Proses Windowing ... 49
Gambar 4.6 Grafik Sinyal Data Hasil Proses Windowing ... 50
Gambar 4.7 Data Hasil Konversi ... 50
Gambar 4.8 Data Hasil Proses Analisis Autokorelasi ... 50
Gambar 4.9 Grafik Sinyal Data Hasil Proses Analisis Autokorelasi Orde 8 ... 51
Gambar 4.10 Data Koefisien LPC Orde 8 ... 51
xvii
Gambar 4.12 Data Delta LPC Orde 8 ... 52
Gambar 4.13 Data Delta Delta LPC Orde 8 ... 52
Gambar 4.14 Data Gabungan Hasil Ekstraksi Ciri LPC Orde 8 ... 53
Gambar 4.15 Grafik Sinyal Data Gabungan Hasil Ekstraksi Ciri LPC Orde 8 .... 53
Gambar 4.16 Tampilan Menu Utama Aplikasi ... 54
Gambar 4.17 Tampilan Proses Ekstraksi Ciri LPC ... 55
Gambar 4.18 Hasil Ekstraksi Ciri 200 Data Suara ... 55
Gambar 4.19 Tampilan Proses Pelatihan dan Pengujian Arsitektur JST ... 56
Gambar 4.20 Tampilan Pelatihan 2 Hidden Layer... 56
Gambar 4.21 Tampilan Pelatihan 1 Hidden Layer... 56
Gambar 4.22 Tampilan Hasil Klasifikasi Suara Mesin Sepeda Motor Rusak Katup/Klep ... 57
Gambar 4.23 Tampilan Hasil Klasifikasi Suara Mesin Sepeda Motor Normal .... 57
Gambar 4.24 Tampilan Hasil Klasifikasi Suara Mesin Sepeda Motor Rusak Rantai Kamprat ... 57
Gambar 4.25 Tampilan Hasil Klasifikasi Suara Mesin Sepeda Motor Rusak Stang Seher/Batang Piston ... 57
Gambar 4.26 Grafik Perubahan Hasil Akurasi Keseluruhan Percobaan ... 61
Gambar 4.27 Grafik Perubahan Akurasi Orde 8, Hidden Layer 1 ... 64
Gambar 4.28 Grafik Perubahan Akurasi Orde 8, Hidden Layer 2 ... 65
Gambar 4.29 Grafik Perubahan Akurasi Orde 8+ , Hidden Layer 1 ... 66
Gambar 4.30 Grafik Perubahan Akurasi Orde 8+ , Hidden Layer 2 ... 67
Gambar 4.31 Grafik Perubahan Akurasi Orde 8++, Hidden Layer 1 ... 68
Gambar 4.32 Grafik Perubahan Akurasi Orde 8++, Hidden Layer 2 ... 69
Gambar 4.33 Grafik Perubahan Akurasi Orde 10, Hidden Layer 1 ... 70
Gambar 4.34 Grafik Perubahan Akurasi Orde 10, Hidden Layer 2 ... 71
Gambar 4.35 Grafik Perubahan Akurasi Orde 10+, Hidden Layer 1 ... 72
Gambar 4.36 Grafik Perubahan Akurasi Orde 10+, Hidden Layer 2 ... 73
Gambar 4.37 Grafik Perubahan Akurasi Orde 10++, Hidden Layer 1 ... 74
Gambar 4.38 Grafik Perubahan Akurasi Orde 10++, Hidden Layer 2 ... 75
Gambar 4.39 Grafik Perubahan Akurasi Orde 12, Hidden Layer 1 ... 76
Gambar 4.40 Grafik Perubahan Akurasi Orde 12, Hidden Layer 2 ... 77
Gambar 4.41 Grafik Perubahan Akurasi Orde 12+, Hidden Layer 1 ... 78
Gambar 4.42 Grafik Perubahan Akurasi Orde 12+, Hidden Layer 2 ... 79
Gambar 4.43 Grafik Perubahan Akurasi Orde 12++, Hidden Layer 1 ... 80
Gambar 4.44 Grafik Perubahan Akurasi Orde 12++, Hidden Layer 2 ... 81
Gambar 4.45 Grafik Perubahan Akurasi Orde 14, Hidden Layer 1 ... 82
xviii
Gambar 4.47 Grafik Perubahan Akurasi Orde 14+, Hidden Layer 1 ... 84
Gambar 4.48 Grafik Perubahan Akurasi Orde 14+, Hidden Layer 2 ... 85
Gambar 4.49 Grafik Perubahan Akurasi Orde 14++, Hidden Layer 1 ... 86
Gambar 4.50 Grafik Perubahan Akurasi Orde 14++, Hidden Layer 2 ... 87
Gambar 4.51 Grafik Perubahan Akurasi Orde 16, Hidden Layer 1 ... 88
Gambar 4.52 Grafik Perubahan Akurasi Orde 16, Hidden Layer 2 ... 89
Gambar 4.53 Grafik Perubahan Akurasi Orde 16+, Hidden Layer 1 ... 90
Gambar 4.54 Grafik Perubahan Akurasi Orde 16+, Hidden Layer 2 ... 91
Gambar 4.55 Grafik Perubahan Akurasi Orde 16++, Hidden Layer 1 ... 92
1
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Perkembangan ilmu pengetahuan dan teknologi meningkat dengan
cepat. Dalam ilmu pengetahuan dan teknologi khususnya pada bidang
komunikasi, pengolahan sinyal memiliki peranan yang sangat penting.
Penelitian yang intensif dalam bidang pengolahan sinyal menyebabkan
teknologi komunikasi berkembang sangat pesat. Salah satunya adalah
pengenalan suara. Konsep pengenalan suara dapat diterapkan dalam
beberapa bidang untuk menyelesaikan beberapa permasalahan. Diantaranya
yaitu pengenalan suara mesin kendaraan terutamanya mesin sepeda motor.
Terdapat berbagai macam pola suara mesin sepeda motor yang dapat
menunjukkan jenis kerusakan dari mesin sepeda motor. Masih banyak
masyarakat pengguna sepeda motor yang tidak mengerti kerusakan yang
terjadi pada mesin sepeda motor mereka, hingga menyebabkan mesin
sepeda motor semakin rusak karena dibiarkan begitu saja. Selain itu
kerusakan pada mesin sepeda motor sering terjadi akibat kelalaian dalam
melakukan perawatan. Untuk penggunaan sepeda motor yang baik,
diperlukan perawatan mesin sepeda motor secara berkala. Dalam melakukan
pengecekan dan perawatan mesin sepeda motor, para teknisi bengkel sering
kali lebih cepat mengetahui kerusakan yang terjadi pada sebuah mesin
sepeda motor hanya dengan mendengar suara mesin sepeda motor tersebut.
Hal ini mereka lakukan untuk mempercepat dalam mendiagnosa kerusakan
mesin sepeda motor tanpa harus membongkar mesin terlebih dahulu.
Pada tahun 2011, terdapat penelitian yang dilakukan oleh sekelompok
mahasiswa Teknik Elektro Universitas Jendral Soedirman, mengenai sistem
pendeteksian kerusakan mesin sepeda motor 4-langkah berbasis suara
menggunakan Support Vector Machine (SVM). Dari penelitian tersebut
baik melalui suara dan penggunaan SVM dalam proses identifikasi suara
mampu memberikan ketepatan pendeteksian hingga mencapai 100%
(Susilawati, dkk 2011). Pada tahun 2007, terdapat penelitian yang dilakukan
oleh sekelompok mahasiswa Teknik Elektro Sekolah Tinggi Teknologi
Telkom, mengenai pengenalan suara jantung menggunakan metode LPC
dan JST-BP. Dari penelitian tersebut diketahui bahwa metode ekstraksi ciri
menggunakan LPC memberikan hasil yang menjanjikan untuk pengenalan
suara secara otomatis, sehingga tingkat keberhasilan pada saat pendeteksian
semakin tinggi. Hal tersebut terbukti dengan nilai sensitivitas total untuk
klasifikasi 4 kelas TP adalah 96.55% (Anggraeni, dkk 2007). Pada tahun
2012, terdapat penelitian yang dilakukan oleh sekelompok mahasiswa
Teknik Elektro Universitas Diponegoro, mengenai Aplikasi Pencirian
Dengan Linear Predictive Coding Untuk Pembelajaran Pengucapan Nama
Hewan Dalam Bahasa Inggris Menggunakan Jaringan Syaraf Tiruan
Propagasi Balik. Dari penelitian tersebut di peroleh kesimpulan bahwa
metode Jaringan Syaraf Tiruan Propagasi Balik mampu untuk mengenali
pola suara dengan tingkat pengenalan yang tinggi, terbukti dengan
presentasi benar antara 80-99% (Rohman, dkk 2012).
Berdasarkan beberapa penelitian diatas, untuk mengatasi
permasalahan tentang identifikasi kerusakan mesin sepeda motor tersebut,
maka dalam penelitian ini akan dibuat sebuah aplikasi yang mampu untuk
mengidentifikasi kerusakan mesin sepeda motor berdasarkan suara mesin
dengan menggunakan fitur Linear Predictive Coding (LPC) untuk proses
ekstraksi ciri suara dan untuk pengenalan pola sinyal suara menggunakan
metode Jaringan Saraf Tiruan Back Propagation. Dengan adanya sistem ini
diharapkan dapat membantu masyarakat yang kurang mengerti dengan
mesin sepeda motor untuk dapat mengidentifikasi sendiri kerusakan mesin
sepeda motor mereka dan juga dapat membantu khususnya teknisi mesin
1.2 Rumusan Masalah
Berdasarkan permasalahan yang diuraikan pada latar belakang diatas,
maka diperoleh rumusan masalah dari penelitian ini yaitu:
1. Bagaimana metode Jaringan Syaraf Tiruan Back Propagation mampu
untuk mengenali kerusakan mesin sepeda motor berdasarkan suara
mesin dengan cepat dan tepat.
2. Berapakah akurasi tertinggi yang dapat dihasilkan oleh metode Jaringan
Syaraf Tiruan Back Propagation dalam mengklasifikasikan suara mesin
sepeda motor.
Hasil ekstraksi ciri menggunakan fitur LPC diharapkan mampu untuk
menunjukkan perbedaan antar karakter masing-masing suara mesin, yang
dapat mempermudah metode Jaringan Syaraf Tiruan Back Propagation
dalam melakukan klasifikasi untuk setiap suara mesin sepeda motor.
1.3 Tujuan
Tujuan dari penelitian ini adalah membuat aplikasi yang mampu:
1. Melakukan ekstraksi ciri file suara mesin menggunakan fitur LPC untuk
mendapatkan perbedaan karakter suara pada masing-masing jenis
kerusakan mesin
2. Mengklasifikasikan file suara mesin berdasarkan jenis kerusakan mesin
menggunakan metode Jaringan Syaraf Tiruan Back Propagation.
Aplikasi ini kiranya akan sangat berguna dikemudian hari untuk
membantu masyarakat dan khususnya para teknisi mesin sepeda motor
1.4 Batasan Masalah
Untuk membahas topik yang lebih terarah dan terfokus pada tujuan
yang akan dicapai, maka batasan masalahnya adalah sebagai berikut :
1. Input data berupa file rekaman suara dalam bentuk format “.wav” dengan frekuensi rate 44,100 hz, dengan panjang data suara selama 3
detik.
2. Proses pengidentifikasian kerusakan mesin sepeda motor dibagi
kedalam 4 jenis yaitu mesin sepeda motor normal, kerusakan katup/klep
sepeda motor, kerusakan rantai kamprat sepeda motor, dan kerusakan
batang piston/stang seher sepeda motor.
3. Mesin sepeda motor yang diidentifikasi yaitu mesin sepeda motor bebek 4-tak non injeksi dan non matic, dengan tahun keluaran diatas
tahun 2000, volume silinder 110-150cc dan kondisi oli mesin serta
knalpot dalam keadaan normal/standard.
1.5 Sistematika Penulisan
Sistematika penulisan tugas akhir ini dibagi menjadi beberapa bab
dengan susunan sebagai berikut :
BAB I : PENDAHULUAN
Pada bab ini dijelaskan mengenai latar belakang masalah yang
mendorong dibangunnya sistem, rumusan masalah, tujuan dibangunnya
sistem, batasan masalah dalam dibangunnya sistem, dan sistematika
penulisan yang digunakan dalam menyelesaikan penelitian tugas akhir ini.
BAB II : LANDASAN TEORI
Pada bab ini akan diuraikan mengenai teori – teori dasar serta metode
yang digunakan dalam pembangunan sistem pada penelitian ini beserta
dengan teori – teori pendukung lainnya. Teori tersebut antara lain mengenai
teori Linear Predictive Coding (LPC) untuk ekstraksi ciri sinyal suara, dan
proses pengenalan pola sinyal suara, yang akan digunakan dalam
perancangan sistem.
BAB III : METODOLOGI PENELITIAN
Pada bab ini akan dibahas mengenai analisa dan perancangan hal – hal
atau komponen – komponen yang akan digunakan untuk melakukan
penelitian, serta perancangan sistem secara lengkap.
BAB IV : IMPLEMENTASI DAN ANALISA HASIL
Pada bab ini akan dijelaskan mengenai implementasi sistem, sarana
yang dibutuhkan, penerapan rancangan yang telah dibuat dalam suatu
program, cara pengoperasian sistem, hasil implementasi, serta analisis dan
evaluasi dari hasil implementasi.
BAB V : PENUTUP
Pada bab ini akan digambarkan kesimpulan dari seluruh penelitian dan
6
2
BAB II
LANDASAN TEORI
Bab ini berisi penjabaran mengenai teori – teori yang mendukung dalam
penelitian ini. Teori – teori yang digunakan dalam penelitian ini yaitu teori mesin
sepeda motor, teori audio/suara, proses ekstraksi ciri sinyal suara menggunakan
fitur Linear Predictive Coding (LPC), metode untuk pengenalan pola sinyal suara
menggunakan Jaringan Saraf Tiruan khususnya model Back Propagation, teori
K-Fold Cross Validation, dan teori Confussion Matrix.
2.1 Mesin Sepeda Motor
Mesin merupakan penghasil tenaga pada suatu kendaraan bermotor,
termasuk sepeda motor. Sepeda motor adalah kendaraan beroda dua yang
digerakkan oleh sebuah mesin. Letak kedua roda sebaris lurus dan pada
kecepatan tinggi sepeda motor tetap stabil disebabkan oleh gaya giroskopik.
Mesin mempunyai komponen utama berupa silinder blok, silinder kop,
dan karter (khusus motor 4 tak). Masing-masing komponen tersebut,
terutama pada komponen pertama dan kedua masih dapat dirinci lagi
menjadi beberapa sub-komponen. Di samping itu, masing-masing
komponen tersebut di atas mempunyai fungsi tertentu, sesuai dengan cara
kerja suatu motor. Salah satu komponen dalam mesin sepeda motor yaitu
blok silinder. Blok silinder bisa dikatakan bagian yang penting pada suara
mesin. Blok silinder tempat piston bergerak bolak balik dan tempat
beberapa komponen kelistrikan dipasangkan (Sutiman & Solikin, 2005).
Selain itu, terdapat komponen-komponen yang disebut komponen
bergerak, yang mempengaruhi suara dari mesin sepeda motor. Diantaranya
piston, ring piston, batang piston, poros engkol (crankshaft), katup/klep, dan
rantai kamprat (Sutiman & Solikin, 2005). Suara yang ditimbulkan oleh
bergeraknya komponen-komponen tersebut dapat menunjukkan kondisi dari
mesin sepeda motor tersebut. Jika mesin sepeda motor dalam kondisi
normal maka suara mesin menunjukkan seluruh komponen bekerja dengan
baik, namun apabila terjadi kerusakan terhadap beberapa komponen, maka
akan timbul suara-suara yang berbeda dari komponen tersebut. Berikut
beberapa kondisi mesin sepeda motor berdasarkan perbedaan suara
bergeraknya komponen-komponen dalam mesin sepeda motor.
2.1.1 Kondisi Mesin Sepeda Motor Berdasarkan Suara
Secara umum, berbagai macam cara dapat dilakukan untuk
mengetahui kondisi dari mesin sepeda motor. Beberapa cara yang
dapat dilakukan antara lain dengan langsung mengecek mesin sepeda
motor dengan membongkar langsung mesin atau hanya dengan
mendengar suara mesin sepeda motor tersebut. Kebanyakan yang
dilakukan oleh para teknisi bengkel dan masyarakat yang mengerti
akan mesin sepeda motor adalah dengan mendengar langsung suara
mesin sepeda motor. Hal tersebut dikarenakan lebih mudah dan
cepat untuk mendiagnosa kerusakan yang terjadi pada mesin sepeda
motor. Berbagai macam alat dapat digunakan untuk membantu
dalam mengidentifikasi kerusakan mesin sepeda motor secara
manual melalui suara, diantaranya adalah menggunakan stetoskop
mekanik hingga menggunakan batang besi ataupun obeng yang
ditempelkan langsung ke mesin sepeda motor dan ke telinga
manusia.
Dari banyaknya kondisi pada mesin sepeda motor, terdapat
beberapa jenis suara yang sering diidentifikasi melalui suara mesin,
2.1.1.1 Mesin Sepeda Motor Normal
Apabila kondisi mesin sepeda motor dalam keadaan
normal, maka suara mesin akan terasa halus tanpa ada
bunyi – bunyian yang mengganggu (noise) ketika mesin
dinyalakan hingga rpm menunjuk angka 3000rpm. Tidak
terdapat suara kasar yang timbul dari bergeraknya
komponen-komponen dalam mesin sepeda motor (Sutiman
& Solikin, 2005).
Gambar 2.2 Mesin Sepeda Motor (Sutiman & Solikin, 2005)
2.1.1.2 Kerusakan Batang Piston/Stang Seher Pada Mesin Sepeda Motor
Batang piston sering juga disebut dengan setang
seher, berfungsi menghubungkan piston dengan poros
engkol. Batang piston meneruskan gerakan piston ke poros
engkol, dimana gerak bolak-balik piston dalam ruang
silinder diteruskan oleh batang piston menjadi gerak putaran
(rotary) pada poros engkol. Ini berarti jika piston bergerak
naik turun, poros engkol akan berputar. Dalam pergerakan
batang piston timbul suara yang menandakan poros engkol
sedang berputar. Dalam keadaan normal suara yang timbul
akan terdengar halus, namun apabila batang piston dalam
keadaan longgar atau bahkan patah, maka akan muncul
suara berisik pada mesin. Hal ini menandakan mesin sepeda
Gambar 2.3 Batang Piston/Stang Seher (Sutiman & Solikin, 2005)
2.1.1.3 Kerusakan Katup/Klep Pada Mesin Sepeda Motor
Katup digerakkan oleh mekanisme katup, yang terdiri
atas poros cam, batang penekan, pegas penutup, dan rol
baut penyetel. Katup pada motor empat langkah (4 tak)
terpasang pada kepala silinder. Tugas katup untuk
membuka dan menutup ruang bakar. Setiap silinder
dilengkapi dengan dua jenis katup (hisap dan buang).
Fungsi katup sebenarnya untuk memutuskan dan
menghubungkan ruang silinder di atas piston dengan udara
luar pada saat yang dibutuhkan. Karena proses pembakaran
gas dalam silinder mesin harus berlangsung dalam ruang
bakar yang tertutup rapat. Jika sampai terjadi kebocoran gas
meski sedikit, maka proses pembakaran akan terganggu.
Oleh karenanya katup-katup harus tertutup rapat pada saat
pembakaran gas berlangsung. Setelan katup yang sudah
longgar bisa menyebabkan suara mesin sepeda motor
terdengar berisik. Suara berisik akan semakin terdengar
ketika putaran gas semakin ditinggikan. Selain itu, setelan
katup yang lemah juga menjadi penanda kerusakan suatu
Gambar 2.4 Katup/Klep (Sutiman & Solikin, 2005)
2.1.1.4 Kerusakan Rantai Kamprat Pada Mesin Sepeda Motor
Agar pembukaan katup-katup sesuai dengan proses
yang terjadi dalam ruang bakar maka mekanisme
pembukaan dan penutupan katup-katup tersebut digerakkan
oleh putaran poros engkol. Ada tiga macam mekanisme
penggerak katup, yaitu dengan batang pendorong, roda gigi,
dan rantai kamprat. Rantai kamprat sepeda motor harus
dipasang dengan tegangan yang cukup. Rantai kamprat
yang terlalu tegang akan menimbulkan bunyi mendesing
terutama pada putaran tinggi sedangkan rantai kamprat yang
terlalu kendor akan menimbulkan suara berisik. Jika
kekencangan rantai berubah-ubah, akan berpengaruh pada
putaran mesin, valve timing atau saat pengapian akan
berubah-ubah pula. Oleh sebab itu, suara berisik pada rantai
kamprat dapat menunjukkan kerusakan pada mesin
(Sutiman & Solikin, 2005).
2.2 Daftar Istilah Resmi Dalam Mesin Sepeda Motor
Berikut ini beberapa kata atau istilah penting dalam mesin sepeda
motor yang disesuaikan dengan bahasa yang digunakan oleh teknisi mesin
secara umum (Sutiman & Solikin, 2005).
Tabel 2.1 Tabel Istilah-Istilah Resmi Dalam Mesin Sepeda Motor
Istilah Keterangan
CC Cubic Capacity (Kapasitas Kubik), satuan yang
digunakan untuk mengukur mesin.
Knalpot
Pipa dibagian belakang motor tempat membuang
gas-gas beracun yang terbentuk saat bensin
dibakar. Knalpot juga digunakan untuk
mengurangi kebisingan mesin.
RPM Revolution Per Minute, banyaknya putaran pada
mesin dalam satu menit.
Silinder
Bagian dari mesin dimana bahan bakar diolah
untuk menjadi tenaga untuk menjalankan sepeda
motor
Seher Piston atau torak.
Stang Seher
Connecting Rod (Batang Piston), adalah
penghubung antara piston dan poros engkol,
yang berfungsi untuk mengubah gerakan bolak
balik piston menjadi gerak putar.
Poros Engkol
Crankshaft, berfungsi meneruskan daya yang
didapat dari piston ke penggerak roda. Disinilah
putaran mesin terjadi.
Rantai Kamprat
Timing Chain (Rantai Keteng), berfungsi untuk
memutar camshaft sehingga didapat pembukaan
dan penutupan katup dengan waktu yang tepat
sesuai putaran mesin dan langkah kerja mesin.
valve (gerakan membuka dan menutup).
Klep
Valve (Katup), berfungsi untuk mengatur keluar
masuk udara dan bahan bakar kedalam dan
keluar silinder.
2.3 Audio/Suara
Audio atau suara merupakan gelombang yang mengandung sejumlah
komponen penting (amplitudo, panjang gelombang dan frekuensi) yang
dapat menyebabkan suara yang satu berbeda dari suara lain. Amplitudo
adalah kekuatan atau daya gelombang sinyal. Tinggi gelombang bisa dilihat
dalam sebuah grafik. Gelombang yang lebih tinggi diinterpretasikan sebagai
volume yang lebih tinggi. Suara beramplitudo lebih besar akan terdengar
lebih keras. Frekuensi adalah jumlah dari siklus yang terjadi dalam satu
detik. Satuan dari frekuensi adalah Hertz atau disingkat Hz. Getaran
gelombang suara yang cepat membuat frekuensi semakin tinggi. Misalnya,
bila menyanyi dalam pita suara tinggi memaksa tali suara untuk bergetar
secara cepat. Suara dengan frekuensi lebih besar akan terdengar lebih tinggi.
Gelombang suara adalah gelombang yang dihasilkan dari sebuah
benda yang bergetar. Sebagai contoh, senar gitar yang dipetik, gitar akan
bergetar dan getaran ini merambat di udara, atau air, atau material lainnya.
Satu-satunya tempat dimana suara tak dapat merambat adalah ruangan
hampa udara. Gelombang suara ini memiliki lembah dan bukit, satu buah
lembah dan bukit akan menghasilkan satu siklus atau periode. Siklus ini
berlangsung berulang-ulang, yang membawa pada konsep frekuensi.
Telinga manusia dapat mendengar bunyi antara 20 Hz hingga 20 kHz
(20.000 Hz) sesuai batasan sinyal audio. Karena pada dasarnya sinyal suara
adalah sinyal yang dapat diterima oleh telinga manusia. Angka 20 Hz
sebagai frekuensi suara terendah yang dapat didengar, sedangkan 20 KHz
merupakan frekuensi tertinggi yang dapat didengar. Gelombang suara
bervariasi sebagaimana variasi tekanan media perantara seperti udara. Suara
diciptakan oleh getaran dari suatu obyek, yang menyebabkan udara
telinga manusia bergetar, yang kemudian oleh otak dianggap sebagai suara
(Sutara, 2014).
2.4 Ekstraksi Ciri Sinyal Suara
Untuk mengekstraksi sinyal dari suara mesin sepeda motor, dalam
penelitian ini digunakan fitur Linear Predictive Coding (LPC). Proses ini
merupakan tahapan penting dalam klasifikasi suara mesin sepeda motor.
Dari proses ini akan diperoleh ciri sinyal suara untuk membedakan tiap jenis
suara mesin berdasarkan orde yang ditentukan. Berikut ini teori mengenai
fitur LPC.
2.4.1 Linear Predictive Coding (LPC)
Linear Predictive Coding (LPC) merupakan salah satu teori
dalam digital signal processing. Linear Predictive Coding (LPC)
secara sederhana adalah suatu sistem pengkodean (coding) untuk
mengkodekan sinyal menjadi suatu sistem kode tertentu. Sistem
kode ini adalah pemodelan dari sinyal suara tersebut dalam bentuk
yang lain. Jadi, dari sinyal suara yang mula-mula berupa amplitudo
berbasis time domain, diubah menjadi model tertentu. Model yang
dihasilkan ini adalah berupa koefisien-koefisien filter synthesizer
setelah melalui tahapan-tahapan pada proses LPC.
Prinsip dasar dari ekstraksi ciri sinyal dengan menggunakan
LPC adalah bahwa contoh sinyal ucapan s(n) pada waktu ke-n dapat
diperkirakan sebagai kombinasi linear p sampel sinyal ucapan
sebelumnya yaitu :
s n ≈ s n − + s n − + ⋯ + s n − p (2.1) dimana, koefisien , , … , diasumsikan konstan untuk satu
frame analisa sinyal suara (Khrisnadi, 2005).
Langkah-langkah proses analisis LPC untuk mendapatkan
koefisien LPC pada proses ekstraksi ciri sinyal suara, yang
1. Frame Blocking
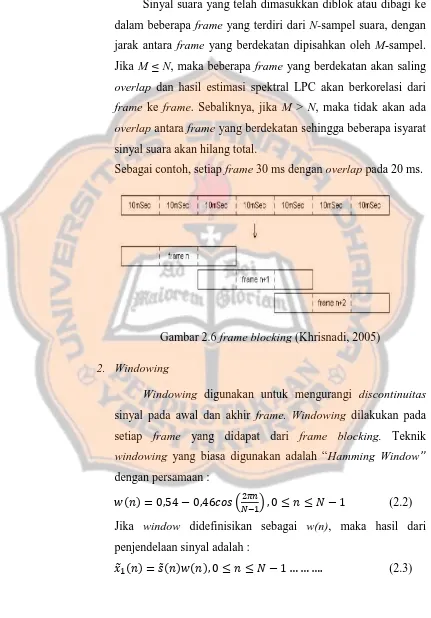
Sinyal suara yang telah dimasukkan diblok atau dibagi ke
dalam beberapa frame yang terdiri dari N-sampel suara, dengan
jarak antara frame yang berdekatan dipisahkan oleh M-sampel.
Jika M ≤ N, maka beberapa frame yang berdekatan akan saling overlap dan hasil estimasi spektral LPC akan berkorelasi dari frame ke frame. Sebaliknya, jika M > N, maka tidak akan ada overlap antara frame yang berdekatan sehingga beberapa isyarat
sinyal suara akan hilang total.
Sebagai contoh, setiap frame 30 ms dengan overlap pada 20 ms.
Gambar 2.6 frame blocking (Khrisnadi, 2005)
2. Windowing
Windowing digunakan untuk mengurangi discontinuitas
sinyal pada awal dan akhir frame. Windowing dilakukan pada
setiap frame yang didapat dari frame blocking. Teknik
windowing yang biasa digunakan adalah “Hamming Window”
dengan persamaan :
= , − , �− , ≤ ≤ � − (2.2)
Jika window didefinisikan sebagai w(n), maka hasil dari
penjendelaan sinyal adalah :
3. Analisis Autokorelasi
Setiap frame dari sinyal setelah melalui proses windowing,
kemudian dikonversi menjadi sebuah matriks 1 x (panjang 1
frame). Lalu dilakukan analisis autokorelasi dengan rumus
sebagai berikut :
= ∑ − − ̃ ̃ +
= , = , , … (2.4)
Dengan nilai autokorelasi tertinggi p adalah orde LPC. Nilai p
biasanya antara 8 sampai 16.
4. Analisis LPC
Proses selanjutnya adalah analisis LPC, yang mengubah
hasil dari analisis autokorelasi p+1 ke dalam bentuk
parameter-parameter LPC atau yang biasa disebut dengan koefisien LPC.
Metode yang biasa digunakan dalam analisis LPC ini adalah
metode Levinson-Durbin yang mempunyai algoritma sebagai
berikut (Rohman dkk, 2012) :
�
=
(2.5)=
{ −∑�−1−1 −1−1 | − | }, ≤ ≤
(2.6)=
(2.7)=
−−
−−, ≤ ≤ −
(2.8)
� =
−
�
−(2.9)
Dengan menyelesaikan persamaan 2.5 sampai 2.9 secara
rekursif untuk i = 1,2,….,p , koefisien LPC diperoleh sebagai
berikut :
5. Nilai delta () dari Koefisien LPC
Hasil dari koefisien LPC kemudian dicari nilai delta-nya
dengan menghitung nilai turunannya. Untuk menghitung nilai
delta-nya digunakan persamaan berikut ini (Ellis, 2003):
∆ =
+−
− (2.11)Dimana D mewakili jumlah dari frame untuk menutup
kedua sisi frame saat ini dan dengan demikian dapat mengontrol
window Y dengan pembedaan operasi. D diset bernilai 1 atau 2.
ΔYt adalah koefisien delta yang dihitung dari frame t untuk
vektor fitur LPC. Nilai dari delta diatas akan diturunkan lagi
menjadi nilai delta delta. Berikut ini adalah persamaannya :
∆∆ = ∆
+− ∆
−(2.12)
Hasil dari perhitungan delta dan delta delta akan
ditambahkan ke vector ciri yang sudah berisi koefisien LPC tadi,
sehingga menghasilkan vector ciri yang lebih besar.
2.5 Jaringan Syaraf Tiruan
Jaringan Syaraf Tiruan adalah sistem pemrosesan informasi yang
memiliki karakteristik mirip dengan jaringan syaraf biologis (Siang, 2005).
Jaringan Syaraf Tiruan dibentuk sebagai generalisasi model
matematika dari jaringan syaraf biologis, dengan asumsi bahwa :
1. Pemrosesan informasi terjadi pada banyak elemen sederhana (neuron).
2. Sinyal dikirimkan diantara neuron-neuron melalui
penghubung-penghubung.
3. Penghubung antar neuron memiliki bobot yang akan memperkuat atau
memperlemah sinyal.
4. Untuk menentukan output, setiap neuron menggunakan fungsi aktivasi
(biasanya bukan fungsi linier) yang dikenakan pada jumlahan input
yang diterima. Besarnya output ini selanjutnya dibandingkan dengan
Jaringan Syaraf Tiruan ditentukan oleh 3 hal:
1. Pola hubungan antar neuron (arsitekstur jaringan).
2. Metode untuk menentukan bobot penghubung.
3. Fungsi aktivasi.
Arsitekstur Jaringan merupakan salah satu hal penting dalam Jaringan
Syaraf Tiruan. Berikut ini beberapa arsitektur jaringan yang sering
digunakan dalam Jaringan Syaraf Tiruan :
1. Jaringan Lapis Tunggal
Dalam jaringan ini, sekumpulan input neuron dihubungkan
langsung dengan sekumpulan output-nya. Dalam jaringan lapis tunggal,
bobot satu unit keluaran tidak mempengaruhi bobot unit keluaran
lainnya.
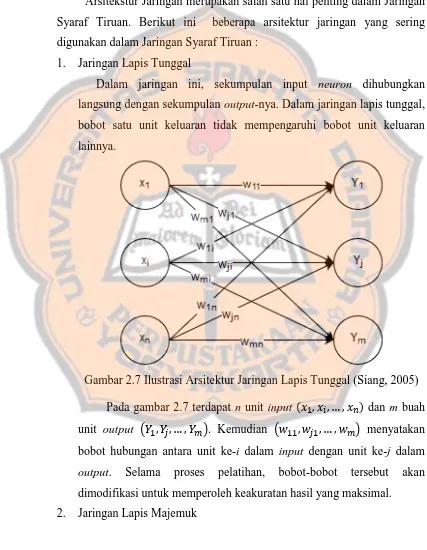
Gambar 2.7 Ilustrasi Arsitektur Jaringan Lapis Tunggal (Siang, 2005)
Pada gambar 2.7 terdapat n unit input , , … , dan m buah
unit output (� , � , … , � ). Kemudian ( , , … , ) menyatakan
bobot hubungan antara unit ke-i dalam input dengan unit ke-j dalam
output. Selama proses pelatihan, bobot-bobot tersebut akan
dimodifikasi untuk memperoleh keakuratan hasil yang maksimal.
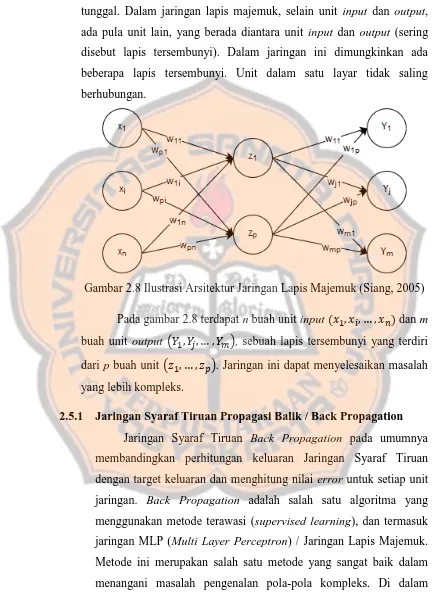
Jaringan lapis majemuk merupakan perluasan dari jaringan lapis
tunggal. Dalam jaringan lapis majemuk, selain unit input dan output,
ada pula unit lain, yang berada diantara unit input dan output (sering
disebut lapis tersembunyi). Dalam jaringan ini dimungkinkan ada
beberapa lapis tersembunyi. Unit dalam satu layar tidak saling
berhubungan.
Gambar 2.8 Ilustrasi Arsitektur Jaringan Lapis Majemuk (Siang, 2005)
Pada gambar 2.8 terdapat n buah unit input , , … , dan m
buah unit output (� , � , … , � ), sebuah lapis tersembunyi yang terdiri
dari p buah unit ( , … , ). Jaringan ini dapat menyelesaikan masalah
yang lebih kompleks.
2.5.1 Jaringan Syaraf Tiruan Propagasi Balik / Back Propagation
Jaringan Syaraf Tiruan Back Propagation pada umumnya
membandingkan perhitungan keluaran Jaringan Syaraf Tiruan
dengan target keluaran dan menghitung nilai error untuk setiap unit
jaringan. Back Propagation adalah salah satu algoritma yang
menggunakan metode terawasi (supervised learning), dan termasuk
jaringan MLP (Multi Layer Perceptron) / Jaringan Lapis Majemuk.
Metode ini merupakan salah satu metode yang sangat baik dalam
menangani masalah pengenalan pola-pola kompleks. Di dalam
dengan setiap unit yang ada di lapisan tersembunyi. Sedangkan
setiap unit di lapisan tersembunyi berhubungan dengan setiap unit di
lapisan output.
Dalam pola pelatihannya, jaringan ini akan diberi input-an
yang akan diteruskan ke dalam layar tersembunyi dan menuju hingga
output. Ketika hasil keluaran ternyata tidak sesuai dengan harapan
maka keluaran akan kembali disebarkan mundur (backward) pada
lapisan tersembunyi hingga menuju input. Tahap selanjutnya adalah
dengan melakukan perubahan bobot. Iterasi ini terus dilakukan
hingga ditemukan penyelesaian yang optimal (Siang, 2005).
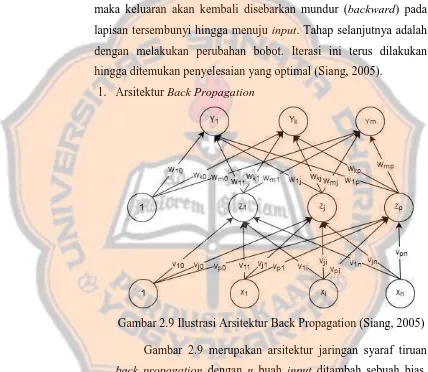
1. Arsitektur Back Propagation
Gambar 2.9 Ilustrasi Arsitektur Back Propagation (Siang, 2005)
Gambar 2.9 merupakan arsitektur jaringan syaraf tiruan
back propagation dengan n buah input ditambah sebuah bias,
sebuah lapis tersembunyi yang terdiri dari p unit ditambah
sebuah bias, dan sebuah lapis unit keluaran.
2. Fungsi Aktivasi
Dalam jaringan syaraf tiruan back propagation, fungsi
aktivasi yang dipakai harus memenuhi beberapa syarat, yaitu :
yang tidak turun. Salah satu fungsi yang memenuhi ketiga syarat
tersebut sehingga sering dipakai adalah fungsi sigmoid biner
yang memiliki range (0,1).
= + −� dengan turunan ′ = ( − ) (2.13)
Fungsi sigmoid memiliki nilai maksimum = 1. Maka untuk
pola yang targetnya > 1, pola masukkan dan keluaran harus
terlebih dahulu ditransformasi sehingga semua polanya memiliki
range yang sama seperti fungsi sigmoid yang dipakai. Alternatif
lain adalah menggunakan fungsi aktivasi sigmoid hanya pada
lapis yang bukan lapis keluaran. Pada lapis keluaran, fungsi
aktivasi yang dipakai adalah fungsi identitas : = .
3. Proses Pelatihan Back Propagation
Proses Pelatihan Jaringan Syaraf Tiruan Back Propagation
terdiri dari 3 proses yaitu propagasi maju, propagasi mundur,
perubahan bobot. Ketiga proses tersebut diulang-ulang sampai
kondisi penghentian terpenuhi. Umumnya penghentian yang
dipakai adalah iterasi dan error. Iterasi akan dihentikan jika
iterasi melebihi iterasi yang ditentukan. Atau jika error sudah
lebih kecil dari yang ditentukan.
1. Propagasi Maju
Selama propagasi maju, sinyal masukkan =
dipropagasikan ke lapis tersembunyi menggunakan fungsi
aktivasi yang ditentukan. Keluaran dari setiap unit lapis
tersembunyi (= ) tersebut selanjutnya dipropagasikan
maju lagi ke lapis tersembunyi di atasnya. Demikian
Berikutnya, luaran jaringan = dibandingkan
dengan target yang harus dicapai = . Selisih −
adalah error yang terjadi. Jika nilai error lebih kecil dari
yang telah ditentukan, maka iterasi dihentikan, jika tidak,
maka bobot setiap garis dimodifikasi untuk mengurangi
error yang terjadi.
2. Propagasi Mundur
Berdasarkan error − , dihitung faktor � =
, , … , yang dipakai untuk mendistribusikan error di unit ke semua unit tersembunyi yang terhubung langsung
dengan . � juga dipakai untuk mengubah bobot garis
yang berhubungan langsung dengan unit luaran.
Dengan cara yang sama, dihitung faktor � di setiap
unit lapis tersembunyi sebagai dasar perubahan bobot
semua garis yang berasal dari unit tersembunyi di
bawahnya. Demikian seterusnya hingga semua faktor � di
unit tersembunyi yang berhubungan langsung dengan unit
masukkan dihitung.
3. Perbaikan Bobot
Setelah semua faktor � dihitung, bobot semua garis
dimodifikasi bersamaan. Perubahan bobot suatu garis
didasarkan atas faktor � neuron di lapis atasnya.
Algoritma pelatihan untuk jaringan dengan satu layar
tersembunyi (dengan fungsi aktifasi sigmoid biner) adalah sebagai
berikut (Siang, 2005) :
Langkah 0: Inisialisasi semua bobot dengan bilangan acak kecil.
Langkah 1: jika kondisi penghentian belum terpenuhi maka lakukan
langkah 2-9.
Langkah 2: untuk setiap pasang data pelatihan, lakukan langkah 3-8
Langkah 3: tiap unit masukan menerima sinyal kemudian
meneruskan ke unit tersembunyi di atasnya.
Langkah 4: hitung semua keluaran di unit tersembunyi (j = 1, 2,
… , p)
_ = + ∑= (2.15)
= ( _ ) (2.16)
Langkah 5: hitung semua keluaran di unit tersembunyi (k = 1, 2,
… , m).
_ = + ∑ = (2.17)
= _ (2.18)
Fase II : Propagasi Mundur
Langkah 6: hitung faktor � unit keluaran berdasarkan error setiap
unit keluaran (k = 1, 2, … , m).
� = − − (2.19)
Hitung suku perubahan bobot dengan laju percepatan
∆ = � ; = , , … , ; = , , … , (2.20) Langkah 7: hitung faktor � unit tersembunyi berdasarkan error di
setiap unit tersembunyi = = , , … ,
�_ = ∑ = � (2.21)
� = �_ ( − ) (2.22)
Hitung suku perubahan bobot
∆ = � ; = , , … , ; = , , … , (2.23)
Fase III : Perubahan Bobot
Langkah 8: Hitung semua perubahan bobot
Perubahan bobot garis yang menuju ke unit keluaran:
= + ∆ ( = , , … , ; = , , … , ) (2.24)
Perubahan bobot garis yang menuju ke unit tersembunyi:
= + ∆ ( = , , … , ; = , , … , ) (2.25)
Jaringan Syaraf Tiruan Back Propagation memiliki kelemahan
tentang berapa epoch yang harus dilalui untuk memperoleh hasil
yang diinginkan.
Faktor-faktor penting dari Jaringan Syaraf Tiruan Back
Propagation agar jaringan bekerja dengan maksimal adalah:
1. Pemilihan Bobot dan Bias Awal
Nguyen dan widrow (1990) mengusulkan cara membuat
inisialisasi bobot dan bias ke unit tersembunyi sehingga
menghasilkan iterasi yang lebih cepat.
Misal:
bilangan acak dalam interval [-0.5, 0.5].
Langkah 2: hitung ‖ ‖ = √ + + ⋯ + (2.26)
Langkah 3: bobot yang dipakai sebagai inisialisasi = =
‖ ‖ (2.27)
Langkah 4: bias yang dipakai sebagai inisialisasi = =
bilangan acak antara – dan .
2. Jumlah Unit Tersembunyi
Jaringan dengan sebuah lapis tersembunyi sudah cukup
bagi Jaringan Syaraf Tiruan Back Propagation untuk mengenali
sembarang kelas antara masukan dan target dengan tingkat
ketelitian yang ditentukan.
Jika jaringan memiliki lebih dari 1 lapis tersembunyi maka
algoritma pelatihan perlu direvisi. Dalam Fase I, keluaran harus
bawah. Kemudian dalam fase II, faktor � perlu dihitung untuk
tiap lapis tersembunyi, dimulai dari lapis keluaran.
3. Jumlah Pola Pelatihan
Jumlah pola pelatihan ditentukan oleh banyaknya bobot
dan tingkat akurasi yang diinginkan.
ℎ = ℎ (2.28)
2.6 K-Fold Cross Validation
K-Fold Cross Validation adalah metode yang digunakan dalam proses
pengujian klasifikasi data. Data dibagi menjadi k bagian kemudian bagian
satu dan bagian yang lain ditukar-tukar sebanyak k (Tan, Steinbach, &
Kumar, 2006).
Sebagai contoh data dibagi menjadi 2 bagian dengan jumlah yang
sama. Pertama, data bagian 1 digunakan sebagai data pelatihan dan data
bagian 2 digunakan sebagai data pengujian. Kedua, data bagian 2 digunakan
sebagai data pelatihan dan data bagian 1 digunakan sebagai data pengujian.
Contoh ini disebut sebagai 2-Fold Cross Validation.
K-Fold Cross Validation menjadikan data pelatihan dan pengujian
tidak sama. Data pelatihan tidak digunakan sebagai data pengujian.
2.7 Confusion Matrix
Data pelatihan dan pengujian merupakan data yang berbeda sehingga
klasifikasi dapat diuji dengan benar. Nilai akurasi berdasarkan hasil
klasifikasi dihitung dari jumlah data yang dikenali sesuai dengan target
kelasnya. Perhitungan akurasi pada klasifikasi data dihitung menggunakan
tabel yang bernama Confusion Matrix (Tan, Steinbach, & Kumar, 2006).
Tabel 2.2 Confusion Matrix 2 Kelas (Tan, Steinbach, & Kumar, 2006)
Hasil Pengujian
1 0
Target
Kelas
1 F11 F10
0 F01 F00
Fij adalah jumlah data yang dikenali sebagai kelas ke-j dengan target
kelas ke-i. Dari tabel 2.2 didapat persamaan-persamaan untuk menghitung
akurasi dan tingkat kesalahan suatu klasifikasi :
1. Persamaan untuk menghitung akurasi keseluruhan klasifikasi
= ℎ ℎ = + ++ + (2.29)
2. Persamaan untuk menghitung error keseluruhan klasifikasi
= ℎ ℎ = + ++ + (2.30)
3. Persamaan untuk menghitung akurasi klasifikasi kelas 1
= ℎ ℎ = + (2.31)
4. Persamaan untuk menghitung error klasifikasi kelas 1
= ℎ ℎ = + (2.32)
5. Persamaan untuk menghitung akurasi klasifikasi kelas 0
= ℎ ℎ = + (2.33)
6. Persamaan untuk menghitung error klasifikasi kelas 0
26
3
BAB III
METODOLOGI PENELITIAN
Bab ini berisi penjelasan dan proses pengolahan data yang akan digunakan
dalam penelitian ini, serta perancangan sistem yang meliputi proses ekstraksi ciri,
pelatihan dan pengujian arsitektur JST, lalu klasifikasi dan uji data, rincian
kebutuhan sistem dan juga perancangan antarmuka sistem.
3.1 Data
Data yang digunakan dalam penelitian ini adalah data rekaman suara
mesin sepeda motor. Suara mesin sepeda motor yang dipilih merupakan
suara mesin sepeda motor yang terbagi kedalam 4 kondisi, yaitu suara mesin
sepeda motor normal, suara mesin sepeda motor mengalami kerusakan
batang piston/stang seher, katup/klep, dan rantai kamprat. Keempat kondisi
mesin sepeda motor tersebut merupakan kondisi mesin yang lebih mudah
dan sering diidentifikasi oleh teknisi bengkel sepeda motor melalui suara
mesin ketika mesin dihidupkan. Untuk mendapatkan data-data suara mesin
sepeda motor, dilakukan perekaman langsung terhadap suara mesin sepeda
motor yang telah dihidupkan di bengkel-bengkel sepeda motor sesuai
dengan kondisi mesin yang telah ditentukan.
Perekaman suara mesin sepeda motor menggunakan aplikasi android
yang ada di-handphone dengan nama Easy Voice Recorder. Aplikasi ini
dapat langsung menghasilkan rekaman file suara dengan format .wav
sehingga dengan mudah hasil perekaman dari aplikasi ini dapat langsung
digunakan sebagai input-an dari aplikasi yang akan dibuat. Untuk proses
perekamannya secara langsung terhadap mesin sepeda motor, dilakukan
dengan mendekatkan handphone yang akan merekam terhadap mesin
sepeda motor yang telah dihidupkan dengan jarak antara 5-10 cm. Berikut
ini gambaran dalam cara merekam suara mesin sepeda motor menggunakan
Gambar 3.1 Proses Perekaman Suara Mesin Sepeda Motor
Proses perekaman suara mesin sepeda motor tersebut dilakukan
sebanyak 40 kali terhadap sepeda motor yang berbeda – beda, sehingga
diperoleh 40 file rekaman dengan rincian, 10 data untuk kondisi mesin
sepeda motor normal dan 10 data untuk masing–masing kondisi kerusakan
mesin sepeda motor. Masing-masing file rekaman suara berdurasi sekitar
15-20 detik. Untuk mengolah 10 data tersebut akan dilakukan proses
preprosesing data sebelum masuk dalam proses ekstraksi ciri suara.
Proses preprosesing tersebut adalah mengkonversi file rekaman asli
menjadi file dengan format audio ‘.wav’, dengan nilai frekuensi rate untuk
setiap data rekaman suara mesin yaitu 44100 hz, resolusi sampling 16 bit
dan berformat PCM. Proses ini membutuhkan aplikasi bernama ‘Audacity’.
Aplikasi tersebut tidak hanya digunakan untuk mengkonversi file rekaman
menjadi format file ‘.wav’, namun juga digunakan untuk memotong-motong
setiap file rekaman suara menjadi 5 file rekaman suara dengan panjang
masing-masing 3 detik. 5 file tersebut diperoleh dengan melakukan
potongan untuk setiap file rekaman suara secara berurutan mulai dari detik
pertama. Dari proses preprosesing tersebut dihasilkan 50 file rekaman suara
mesin untuk setiap kondisi mesin sepeda motor, sehingga total menjadi 200
file ‘.wav’. 200 file tersebut yang siap diolah dalam proses ekstraksi ciri
suara.
Contoh data audio berupa sinyal digital yang digunakan dalam
penelitian ini dapat dilihat pada gambar-gambar di bawah ini. Data tersebut
ditampilkan dalam bentuk grafik sinyal dan spektrogram.
Gambar 3.2 Contoh Sinyal dan Spektrogram Suara Mesin Sepeda Motor Normal
Pada gambar 3.2 , grafik pertama menggambarkan sinyal suara mesin
sepeda motor normal berdasarkan nilai amplitude-nya dalam 1 detik. Untuk
grafik kedua menggambarkan sinyal suara mesin sepeda motor normal
Gambar 3.3 Contoh Sinyal dan Spektrogram Suara Mesin Sepeda Motor Rusak Stang Seher
Pada gambar 3.3 , grafik pertama menggambarkan sinyal suara mesin
sepeda motor rusak stang seher berdasarkan nilai amplitude-nya dalam 1
detik. Untuk grafik kedua menggambarkan sinyal suara mesin sepeda motor
rusak stang seher dalam bentuk spectrogram berdasarkan nilai frekuensi-nya
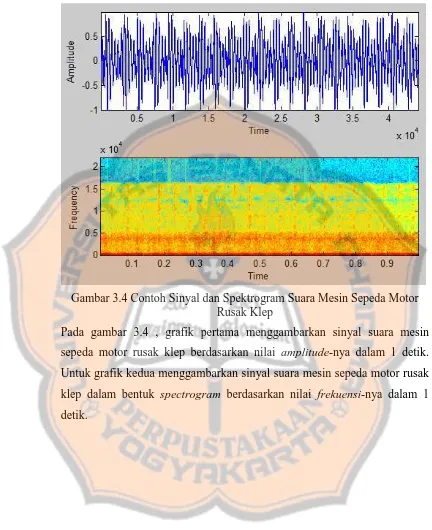
Gambar 3.4 Contoh Sinyal dan Spektrogram Suara Mesin Sepeda Motor Rusak Klep
Pada gambar 3.4 , grafik pertama menggambarkan sinyal suara mesin
sepeda motor rusak klep berdasarkan nilai amplitude-nya dalam 1 detik.
Untuk grafik kedua menggambarkan sinyal suara mesin sepeda motor rusak
klep dalam bentuk spectrogram berdasarkan nilai frekuensi-nya dalam 1
Gambar 3.5 Contoh Sinyal dan Spektrogram Suara Mesin Sepeda Motor Rusak Rantai Kamprat
Pada gambar 3.5 , grafik pertama menggambarkan sinyal suara mesin
sepeda motor rusak rantai kamprat berdasarkan nilai amplitude-nya dalam 1
detik. Untuk grafik kedua menggambarkan sinyal suara mesin sepeda motor
rusak rantai kamprat dalam bentuk spectrogram berdasarkan nilai
frekuensi-nya dalam 1 detik.
3.2 Perancangan Sistem
Sub bab ini berisi tentang perancangan sistem dari aplikasi yang akan
dibuat. Proses dimulai dari ekstraksi ciri data sinyal suara, kemudian data
hasil ekstraksi ciri masuk kedalam pelatihan arsitektur JST dengan
parameter-parameter yang telah ditentukan, sehingga diperoleh model
jaringan yang menghasilkan akurasi terbaik. Kemudian dilakukan uji pada
sebuah data suara baru yang juga telah diekstraksi ciri dan dilakukan
klasifikasi menggunakan model jaringan yang telah diperoleh, sehingga
diperoleh hasil penunjukkan kelas dari data yang diklasifikasi.
Pada proses ekstraksi ciri data sebelum pelatihan arsitektur jaringan
dan pengujian data, digunakan fitur Linear Predictive Coding (LPC). Untuk
proses pelatihan arsitektur jaringan dan klasifikasi data dalam pengujian
digunakan metode Jaringan Syaraf Tiruan Back Propagation. Berikut ini
Data
Data Uji Ekstraksi Ciri
Jaringan Syaraf Tiruan Ekstraksi Ciri
Model Jaringan
Hasil Klasifikasi
Gambar 3.6 Diagram Blok Sistem
3.2.1 Ekstraksi Ciri
Fitur ekstraksi ciri sinyal suara yang digunakan dalam penelitian
ini adalah Linear Predictive Coding (LPC). Fitur ini dipilih karena
LPC merupakan salah satu teknik ekstraksi ciri yang sering digunakan
dalam mengekstraksi ciri sinyal digital suara. Akurasi kemampuan
pengenalan dari hasil ekstraksi ciri juga menunjukkan hasil yang baik.
Ada dua tahapan proses utama dalam melakukan ekstraksi ciri
LPC, yakni proses autokorelasi dan proses analisis koefisien LPC.
Pada proses autokorelasi ditentukan suatu nilai orde analisis P, dimana
nilai orde tersebut juga menentukan banyaknya ciri yang dihasilkan
dari proses analisis LPC. Ciri tersebut dinamakan koefisien LPC.
Proses ekstraksi ciri dilakukan pada semua data mentah yang
telah dikonversi dan di lakukan proses preprosesing. Hasil ekstraksi