SKRIPSI
Skripsi Yang Diajukan Untuk Melengkapi Syarat Memperoleh Gelar Sarjana Teknik
RIJOI SINAGA 160401060
DEPARTEMEN TEKNIK MESIN FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA 2021
RANCANG BANGUN SISTEM MEKANIK PADA PORTAL PARKIR OTOMATIS
SKRIPSI
Saya menyatakan bahwa skripsi ini adalah hasil karya sendiri, kecuali beberapa kutipan dan ringkasan yang masing masing disebutkan sumbernya.
Medan, 23 September 2021
Rijoi sinaga 160401060
RANCANG BANGUN SISTEM MEKANIK PADA PORTAL PARKIR OTOMATIS
ABSTRAK
Portal parkir merupakan alat yang memiliki fungsi sebagai palang otomatis yang biasanya digunakan di area parkir. Sistem palang parkir yang ada sekarang ini tidak lepas dengan sistem controller dan motor listrik sebagai penghasil energi listrik yang akan diubah menjadi energi mekanik. Namun, sistem palang parkir yang saat ini digunakan terkhusus di wilayah sumatera masih menggunakan sistem penggerak motor AC dan ada juga yang menggunakan sistem penggerak hidrolik. Sistem penggerak ini masih menggunakan daya listrik dari PLN. Harga komponen dan perawatan dari sistem penggerak ini juga diketahui cukup mahal. Pada rancangan ini akan dicoba merubah salah satu komponen pada palang parkir yaitu merubah sistem penggerak mekanik dari motor AC dan juga hidrolik menjadi motor DC.
Perancangan alat ini dibuat untuk kendaraan sepeda motor. Metode yang digunakan adalah perancangan dengan perhitungan komponen yang dibutuhkan seperti: Motor listrik, gearbox, dan Sproket serta melakukan pembangunan produk. Tujuan penelitian ini adalah untuk mendapatkan perhitungan komponen yang dibutuhkan oleh sistem mekanik portal parkir untuk melakukan kerja buka tutup yaitu dengan durasi 1,5 detik dan sudut buka tutup ialah 90
º
. Hasil Penelitian ini didapatkan komponen yang dibutuhkan oleh sistem mekanik boom gate ini untuk melakukan kerja buka tutup palang selama 1,5 detik yaitu: motor DC (24V, 250 W, 2750 rpm), gearbox type 40 rasio 1:60, dan sprocket 1 : 4,5 (10 gigi dan 45 gigi). Kesimpulan yang didapat adalah dengan menggunakan komponen-komponen tersebut. Portal parkir dapat bekerja sesuai dengan durasi waktu yang diinginkan, dan dengan sudut 90º.
Kata kunci: boom gate, controller, hidrolik, energi listrik
DESIGN AND BUILD A MECHANICAL SYSTEM ON AN AUTOMATIC PARKING PORTAL
ABSTRACT
Boom gate (parking portal) is a tool that has a function as an automatic bar which is usually used in parking areas. The current parking barrier system cannot be separated from the controller system and electric motor as a producer of electrical energy which will be converted into mechanical energy. However, the parking barrier system currently used, especially in the Sumatran region, still uses an AC motor drive system and some use a hydraulic drive system. This drive system still uses electricity from PLN. The cost of components and maintenance of this drive system is also known to be quite expensive. In this design, we will try to change one of the components on the parking bar, namely changing the mechanical drive system from AC and hydraulic motors to DC motors. This mechanical system design is made for motorcycle vehicles. The method used is a design by calculating the required components such as: electric motor, gearbox, and sprocket as well as product development. The purpose of this study was to obtain a calculation of the components required by the parking portal mechanical system to do the opening and closing work with a duration of 1.5 seconds and the opening and closing angle of 90º. The result of this study, it was found that the components needed by the boom gate mechanical system to do the work of opening and closing the bars for 1.5 seconds, namely: DC motor (24V, 250 W, 2750 rpm), gearbox type 40 ratio 1:60, and sprocket 1: 4.5 (10 teeth and 45 teeth). The conclusion obtained is to use these components. The parking portal can work according to the desired duration of time, and with an angle of 90 .
Keywords: boom gate, controller, hydraulic, electrical energy
PENGHARGAAN
Puji dan syukur kepada Tuhan Yang Maha Esa atas berkat, rahmat dan karunia-Nya sehingga penulis dapat menyelesaikan penyusunan skripsi ini dengan judul
“Rancang Bangun Sistem Mekanik Pada Portal Parkir Otomatis”.
Terima kasih penulis sampaikan kepada Prof. Dr. Ir. Bustami Syam, MSME selaku dosen pembimbing yang telah meluangkan waktunya selama penyusunan skripsi ini.
Terima kasih kepada Bapak Dr. Ir. M Sabri, MT dan Bapak Terang Ukur H. S.
Ginting Manik ST MT selaku ketua program studi dan sekretaris program studi Teknik Mesin FT – USU Medan, dekan dan wakil dekan Fakultas Teknik USU, seluruh staf dan dosen teknik mesin FT – USU, pegawai FT – USU dan rekan-rekan kuliah. Akhirnya tidak terlupakan kepada Bapak, Ibu dan keluarga yang selama ini memberikan bantuan dan dorongan yang diperlukan. Semoga Tuhan Yang Maha Esa akan membalasnya.
Medan, 23 September 2021
Rijoi Sinaga NIM. 160401060
KATA PENGANTAR
Puji dan syukur penulis ucapkan atas kehadirat Tuhan Yang Maha Esa, yang senantiasa melimpahkan kasih dan rahmatNya sehingga penulis dapat menyelesaikan penelitian skripsi ini.
Skripsi ini merupakan salah satu syarat untuk menjadi Sarjana Teknik di Departemen Teknik Mesin Fakultas Teknik Universitas Sumatera Utara. Adapun judul skripsi yang dipilih oleh penulis yaitu “Rancang Bangun Sistem Mekanik Pada Portal Parkir Otomatis”
Dalam penulisan skripsi ini, tidak sedikit kesulitan yang dihadapi oleh penulis, namun berkat dorongan, semangat, doa serta bantuan moral dan material, kesulitan tersebut dapat teratasi. Maka dari itu pada kesempatan ini penulis ingin mengucapkan terimakasih kepada pihak-pihak yang telah berjasa dalam penyelesain skripsi ini, yaitu:
1. Kedua orang tua yang selalu mendoakan dan memotivasi penulis agar tetap semangat dan juga memberikan dukungan materi.
2. Bapak Prof.Dr.Ir.Bustami Syam, MSME sebagai Dosen Pembimbing Skripsi yang banyak memberi arahan, bimbingan, motivasi, nasehat dan pelajaran yang sangat berharga selama proses penyelesaian Skripsi ini.
3. Bapak Dr.Ir. M. Sabri, MT Selaku Ketua Departemen Teknik Mesin , Fakultas Teknik Universitas Sumatera Utara.
4. Bapak Terang UHSG, ST, MT., selaku Sekretaris Departemen Teknik Mesin Universitas Sumatera Utara.
5. Seluruh staf pengajar Departemen Teknik Mesin Fakultas Teknik Universitas Sumatera Utara yang telah sabar dan berjuang untuk memberikan bekal pengetahuan kepada penulis hingga dapat menyelesaikan studi, seluruh pegawai administrasi DTM FT USU dan juga staf Fakultas Teknik.
6. Teman-teman satu tim BOOM GATE Filbert Sihombing, Liwandy Sinaga, Yoshua D. Bergkamp, Zoanri purba dan juga tim lain di IFRC yang telah berjuang bersama-sama dalam proses penyelesaian skripsi ini.
7. Abang-abang Magister Teknik Mesin S2, yang juga memberikan arahan dan motivasi kepada penulis.
8. Seluruh teman stambuk 2016 yang telah sama sama berjuang menyelesaikan studi di DTM FT USU ini.
9. Kakak dan abang: Erika H. Sinaga, Sulastri Sinaga dan Pilemon Sinaga yang selalu memberikan dukungan.
Penulis berharap skripsi ini dapat memberikan tambahan pengetahuan kepada pembaca serta dapat memberikan manfaat bagi orang lain. Penulis menyadari masih ada kekurangan dalam penulisan skripsi ini sehingga penulis mengharapkan kritik dan saran yang bersifat membangun sehingga skripsi ini lebih sempurna. Penulis mengucapkan terimakasih banyak atas kerjasamanya.
Medan, 23 September 2021
Rijoi Sinaga NIM.160401060
DAFTAR ISI
ABSTRAK i
ABSTRACT ii
PENGHARGAAN iii
KATA PENGANTAR iv
DAFTAR ISI vi
DAFTAR TABEL ix
DAFTAR GAMBAR x
DAFTAR NOTASI xii
DAFTAR SINGKATAN xiii
DAFTAR LAMPIRAN xiv
BAB 1 PENDAHULUAN 1
1.1 Latar Belakang 1
1.2 Peta jalan penelitian 3
1.3 Batasan Masalah 4
1.4 Tujuan Penulisan 4
1.4.1 Tujuan Umum 4
1.4.2 Tujuan Khusus 4
1.5 Manfaat 4
1.6 Sistematika penelitian 5
BAB 2 TINJAUAN PUSTAKA 6
2.1 Teori Rancang Bangun 6
2.1.1 Pengertian Rancang 6
2.1.2 Pengertian Bangun 6
2.1.3 Pengertian Rancang Bangun 6
2.2 Sistem Mekanik 7
2.3 Boom Gate 12
2.4 Motor Listrik 13
2.4.1 Jenis-Jenis Motor Listrik 14
2.4.2 Perhitungan Pada Motor DC 15
2.5 Speed Reducer (Gearbox) 16
2.5.1 Komponen Utama Gearbox 17
2.6 Torsi 18
2.7 Bearing (Bantalan) 19
2.7.1 Prediksi Umur Bantalan 21
2.8 Poros 22
2.8.1 Hal – hal yang diperhatikan perencanaan poros 23
2.8.2 Kekuatan poros 24
2.9. Sprocket and Chain 24
2.9.1 Sprocket 24
2.9.2 Chain (Rantai) 25
2.10 Hubungan Roda-Roda 26
2.10.1 Gerak Melingkar Berubah Beraturan 28
2.11 Cara kerja relay 29
BAB 3 METODOLOGI PENELITIAN 31
3.1 Metode desain 31
3.1.1 Perencanaan Komponen Sistem Mekanik Boom Gate 34
3.2 Fabrikasi sistem mekanik boom gate 36
3.3 Tempat dan Waktu 37
3.3.1 Tempat 37
3.3.2 Waktu 37
3.4 Peralatan dan Bahan 37
3.4.1 Peralatan 37
3.4.2 Bahan 38
3.5 Cara Kerja Sistem Mekanik Boom Gate 40
3.6 Prosedur pengujian 41
3. 7 Diagram alir penelitian 42
BAB 4 HASIL DAN PEMBAHASAN 43
4.1 Gaya Yang Bekerja Pada Palang 43
4.2 Analisa Kecepatan dan Percepatan 44
4.2.1 Kecepatan Sproket 44
4.2.2 Percepatan Sproket 46
4.2.3 Kecepatan pada palang 47
4.2.4 Percepatan pada palang 48
4.3 Perancangan sistem mekanik boom gate 49
4.3.1 Putaran Pada Poros Sprocket kedua 49
4.3.2 Torsi pada poros palang 50
4.3.3 Daya Motor Yang Direncanakan 51
4.3.4 Perancangan komponen komponen pendukung 52
4.4 Fabrikasi sistem mekanik boom gate 56
4.5 Hasil pembuatan sistem mekanik boom gate dan hasil pengujian 60
BAB 5 KESIMPULAN DAN SARAN 62
5.1 Kesimpulan 62
5.2 Saran 63
DAFTAR PUSTAKA 64
LAMPIRAN
DAFTAR TABEL
Tabel 1. 1 Peta jalan Penelitian 3
Tabel 2. 1 Hubungan roda-roda 28
Tabel 3.1 Dimensi rangka boom gate 34
Tabel 3. 2 Peralatan 37
Tabel 3. 3 Bahan 38
DAFTAR GAMBAR
Gambar 2. 1 Motor DC 7
Gambar 2. 2 Geared motor DC 8
Gambar 2. 3 Motor servo 8
Gambar 2. 4 Smart servo 9
Gambar 2. 5 Motor stepper 9
Gambar 2. 6 Linear actuator 10
Gambar 2. 7 Selenoid 10
Gambar 2. 8 Pneumatic 11
Gambar 2. 9 Hydraulic 11
Gambar 2. 10 Boom gate 12
Gambar 2. 11 Boom gate semi automatic 12
Gambar 2. 12 Sistem barrier gate automatic 13
Gambar 2. 13 Sistem barrier gate full automatic 13
Gambar 2.14 Gearbox 16
Gambar 2.15 Pillow Block 19
Gambar 2.16 Bantalan luncur 20
Gambar 2.17 Bantalan gelinding 20
Gambar 2.18 Poros 22
Gambar 2.19 Bagian-bagian rantai 26
Gambar 2. 20 Hubungan roda-roda seporos 26
Gambar 2. 21 Hubungan roda-roda bersinggungan 27
Gambar 2. 22 Hubungan roda-roda yang dihubungkan dengan sabuk 27
Gambar 2. 23 Bagian-bagian Relay 29
Gambar 2. 24 Relay 30
Gambar 3.2 Sistem mekanik boom gate 3D 31
Gambar 3.3 Desain 2D sistem mekanik boom gate 32
Gambar 3.4 Desain Boom Gate 33
Gambar 3.5 Desain rangka boom gate 33
Gambar 3.6 Assembly setiap part 34
Gambar 3. 7 Komponen sistem mekanik boom gate 41
Gambar 4. 1 Palang dengan sudut 45º 43
Gambar 4. 2 Palang dengan sudut 90º 43
Gambar 4. 3 Sistem Mekanik 44
Gambar 4. 4 Analisa arah kecepatan 44
Gambar 4. 5 arah Percepatan 46
Gambar 4.6 Putaran pada poros 49
Gambar 4.7 Torsi pada poros 51
Gambar 4.8 Gearbox 54
Gambar 4.9 Perbadingan rasio putaran sprocket 55
Gambar 4.10 Pembuatan rangka 57
Gambar 4.11 Dudukan motor DC, gearbox dan pillow block 57
Gambar 4.12 Pemasangan motor DC dan gearbox 58
Gambar 4.13 Pemasangan poros 58
Gambar 4.14 Pemasangan Sprocket dan Rantai 59
Gambar 4.15 Pemasangan transmission shaft dan palang 59
Gambar 4.16 Pemasangan sistem control 60
Gambar 4.17 Finishing boom gate 60
Gambar 4.18 Sistem mekanik boom gate 61
Gambar 4.19 Pengujian sistem mekanik boom gate 61
DAFTAR NOTASI
Symbol Keterangan Satuan
P Daya Motor Listrik (Watt)
T Torsi motor listrik (Nm)
n Putaran motor listrik (rpm)
ω Kecepatan sudut (rad/second)
t Waktu (s)
𝜃 Sudut °
F Gaya (N)
l Jarak benda ke pusat rotasi (m)
m Massa (kg)
g Gravitasi (m/ )
w Gaya Berat (N)
d Jarak pembebanan
dengan pusat perputaran (m)
dp Diameter poros (mm)
DAFTAR SINGKATAN
CAD = Computer Aided Design DC = Direct current
AC = Alternating Current
DAFTAR LAMPIRAN
1. Diagram pohon penelitian
BAB 1 PENDAHULUAN
1.1 Latar Belakang
Kebutuhan listrik pada system parking khususnya palang parkir dapat dialihkan dari Perusahaan Listrik Negara (PLN) dengan cara lain. Modifikasi desain polisi tidur atau dapat dikatakan dengan smart police trap merupakan salah satu cara untuk menghasilkan energi listrik bangkitan. Energi listrik bangkitan ini didapatkan dari adanya tekanan roda kendaraan ke arah gravitasi bumi saat melintasi speed bump. Saat roda kendaraan menekan speed bump, timbul energi kinetik. Energi tersebut dapat diubah menjadi energi listrik dengan menambahkan konsep generator elektrik dimana tersusun atas transmisi roda gigi, mekanisme fly wheel dan motor DC [1].
Speed bump merupakan bagian jalan yang ditinggikan berupa tambahan aspal atau semen yang dipasang melintang di jalan untuk pertanda memperlambat laju/kecepatan kendaraan. Untuk meningkatkan keselamatan dan kesehatan bagi pengguna jalan, ketinggiannya diatur dan apabila melalui jalan yang akan dilengkapi dengan rambu-rambu pemberitahuan terlebih dahulu mengenai adanya pembatas kecepatan kendaraan (Speed Bump), khususnya pada malam hari, maka Speed Bump dilengkapi dengan marka jalan dengan garis serong berwarna putih atau kuning yang kontras sebagai pertanda [2].
Parkir adalah keadaan tidak bergerak suatu kendaraan yang bersifat sementara karena ditinggalkan oleh pengemudinya. Secara hukum dilarang untuk parkir di tengah jalan raya, namun parkir di sisi jalan umumnya diperbolehkan. Fasilitas parkir dibangun bersama-sama dengan kebanyakan gedung untuk memfasilitasi kendaraan pemakai gedung. Termasuk dalam pengertian parkir adalah setiap kendaraan yang berhenti pada tempat-tempat tertentu baik yang dinyatakan dengan rambu lalu lintas ataupun tidak, serta tidak semata-mata untuk kepentingan menaikkan dan menurunkan orang atau barang [3].
Pada umumnya sistem parkir yang berlaku di masyarakat masih menggunakan cara manual. Dengan kata lain dilakukan dengan meminta karcis masuk atau dengan tanda lainnya setiap masuk. Namun pada pengerjaannya hal ini
dirasa kurang maksimal karena untuk menuliskan karcis masuk tersebut membutuhkan waktu yang cukup lama. Apabila kendaraan yang mau parkir banyak pastinya akan menyebabkan kemacetan. Sehingga diciptakanlah boom barrier gate (palang parkir) untuk mempermudah pengerjaannya. Dimana pada saat tombol di tekan akan mengeluarkan karcis, sekaligus palang parkir akan terbuka dengan sendirinya.
Boom gate (portal parkir) merupakan alat yang memiliki fungsi sebagai palang otomatis yang biasanya digunakan di area parkir [4]. Sistem palang parkir yang ada sekarang ini tidak lepas dengan sistem controller dan motor listrik sebagai penghasil energi listrik yang akan diubah menjadi energi mekanik. Namun sistem palang parkir yang saat ini digunakan terkhusus di wilayah sumatera masih menggunakan sistem penggerak motor AC dan ada juga yang menggunakan sistem penggerak hidrolik. Dimana sistem penggerak ini masih menggunakan daya listrik dari PLN. Harga komponen dan perawatan dari sistem penggerak ini juga diketahui cukup mahal.
Sehingga pada rancangan kali ini akan dicoba merubah salah satu komponen pada palang parkir yaitu merubah sistem penggerak mekanik dari motor AC dan juga hidrolik menjadi motor DC. Perancangan sistem mekanik ini dirancang untuk kendaraan sepeda motor. Cara kerjanya tidak akan jauh berbeda dari sistem palang parkir yang saat ini sedang digunakan. Perancangan ini dilakukan dengan tujuan untuk menggunakan daya yang telah dihasilkan oleh sistem mekanik speed bump.
Sekaligus untuk menentukan beberapa komponen sistem penggerak yang sesuai dengan yang dibutuhkan untuk membuka dan menutup palang dengan waktu 1,5 detik. Alasan penentuan waktu buka tutup palang tersebut didasari pada boom gate komersil. Pada boom gate komersil durasi waktu membuka dan menutup palang ialah diantara 1,3 detik sampai 1,8 detik. Sehingga penulis memilih 1,5 detik untuk membuka palang.
1.2 Peta jalan penelitian
Di bawah ini merupakan peta jalan penelitian yang telah dilakukan di Laboratorium Imfact and Fracture Research Center (IFRC) di bawah bimbingan Prof. Dr. Ir. Bustami Syam, MSME. Adapun peta jalan penelitian yang telah dilakukan di IFRC mengenai sistem mekanik boom gate dapat dilihat pada Tabel 1.1 di bawah ini.
Tabel 1.1 Peta jalan Penelitian
PENGEMBANGAN SISTEM MEKANIK Program Sistem Mekanik Speed Bump Generasi 1 Sub program Rancang Bangun Sistim Mekanik Speedbump untuk Menghasilkan
Dayalistrik sebagai Tenaga Pembuka Gerbang Pintu Tol Kota Medan Oleh Tarmizi Taher dan Alexander Sebayang
2016
Sistem Mekanik Speed Bump Generasi 2
Sub Program Membahas tentang sistem mekanik ditingkatkan dengan
menggunakan sistem rotasi dan hanya bisa dilewati oleh satu roda mobil kenderaan roda 4.
Herry darmady
2017
Sistem Mekanik Speed bump generasi 3
Sub Program Rancang Bangun Sistem Mekanik Speed Bump Generasi 3 Sebagai
Penghasil Daya Listrik Oleh Armanda Putra Rilda Lubis
2019
Sistem Mekanik Speed Bump Generasi 4
Sub Program Rancang Bangun Dan Study Eksperimental Sistem Mekanik Speed
Bump Sebagai Penghasil Daya Listrik Oleh Fakhrur Rozy
2021
Sistem mekanik Boom gate Sub Program
Konsumsi daya Sub Program
Rancang Bangun Sistem Mekanik Pada Portal Parkir Otomatis
Oleh Rijoi Sinaga (sumber dana mandiri)
Analisa Pengaruh Variasi Kecepatan Pengoperasian Palang Parkir dengan Konsumsi Daya Listrik pada Motor
Oleh Filbert Sihombing (sumber dana mandiri)
2021
1.3 Batasan Masalah
Pada penulisan laporan ini dilakukan pembatasan masalah dengan tujuan untuk mempersempit ruang lingkup permasalahan yang akan dikaji lebih lanjut.
Pembatasan masalah tersebut antara lain:
1. Desain sistem mekanik boom gate dengan menggunakan software CAD(Computer Aided Design).
2. Sistem penggerak menggunakan motor DC dengan tegangan(V)= 24V, Daya(P)= 250W, Putaran(n)= 2750 rpm.
3. Sistem control dibuat hanya untuk melakukan pengujian menentukan durasi waktu yang dibutuhkan untuk buka tutup palang.
4. Perancangan sistem penggerak didasari oleh kecepatan waktu buka tutup palang yang di tentukan yaitu 1,5 detik naik dan 1,5 detik turun dengan sudut buka tutup 90°.
5. Dimensi rangka portal parkir ditentukan 350 mm (P) x 350 mm (L) x 850 mm (T).
6. Perancangan alat ini dibuat untuk kendaraan sepeda motor.
1.4 Tujuan Penulisan 1.4.1 Tujuan Umum
Tujuan umum pada penelitian ini adalah membuat desain untuk fabrikasi sistem mekanik boom gate dengan penggerak motor DC.
1.4.2 Tujuan Khusus
Adapun tujuan khusus dari penelitian ini yaitu:
1. Melakukan proses perancangan sistem mekanik boom gate dengan penggerak motor DC.
2. Melakukan fabrikasi sistem mekanik boom gate yang telah dirancang oleh penulis.
1.5 Manfaat
Adapun manfaat dari penelitian ini adalah:
1. Bagi penulis sendiri yaitu untuk memperoleh pengetahuan dan pemahaman mengenai perancangan dan pembuatan sistem mekanik portal parkir otomatis.
2. Dari sisi akademis memberikan sumbangan data untuk penelitian selanjutnya.
3. Dari sisi ekonomis dapat mengurangi biaya pembuatan, pemasangan, perawatan, serta biaya-biaya lainnya.
4. Dari sisi sosial dapat mengurangi kemacetan pada saat akan parkir.
1.6 Sistematika penelitian
Pada penyusunan skripsi ini agar terstruktur secara sistematis dan mudah dibaca, maka skripsi ini dibagi ke dalam beberapa bagian. Adapun bagian-bagian tersebut yaitu:
BAB 1 PENDAHULUAN
Berisikan dasar dan alasan pentingnya permasalahan ini dikaji agar dapat menjawab permasalahan yang ada, batasan masalah agar terarah, tujuan apa yang akan diperoleh, manfaat dari penelitian, dan sistematika penulisan skripsi ini.
BAB 2 TINJAUAN PUSTAKA
Berisikan uraian dari teori-teori dan referensi dari penulis sebelumnya yang akan digunakan untuk menyelesaikan skripsi secara jelas.
BAB 3 METODOLOGI PENELITIAN
Berisikan urutan dan cara yang dilakukan secara jelas dan sistematis untuk melaksanakan tulisan ilmiah. Pada bab ini juga akan dibahas mengenai alat dan bahan yang digunakan selama penelitian.
BAB 4 HASIL DAN PEMBAHASAN
Berisikan hasil penyajian dari desain dan pembuatan alat penelitian. Akan dibahas juga hasil dari metodologi penelitian.
BAB 5 KESIMPULAN DAN SARAN
Berisikan jawaban dari tujuan penelitian dan saran yang mendung untuk penelitian ke depannya.
DAFTAR PUSTAKA LAMPIRAN
BAB 2
TINJAUAN PUSTAKA
2.1 Teori Rancang Bangun 2.1.1 Pengertian Rancang
Rancang merupakan serangkaian prosedur untuk menerjemahkan hasil analisis dari sebuah sistem ke dalam bahasa pemograman untuk mendeskripsikan dengan detail bagaimana komponen-komponen sistem diimplementasikan.
Tahapan perancangan menurut jogiyanto (1999;197), yaitu:
1. Untuk memenuhi kebutuhan kepada pemakai sistem.
2. Untuk memberikan gambaran yang jelas dan rancang bangun yang lengkap kepada ahli teknik yang terlibat.
Berdasarkan pengertian di atas dapat diketahui bahwa rancang adalah suatu kegiatan yang bertujuan untuk mendesain sistem baru setelah menentukan proses dan data yang diperlukan.
2.1.2 Pengertian Bangun
Bangun merupakan kegiatan menciptakan sistem baru maupun mengganti atau memperbaiki sistem yang telah ada baik secara keseluruhan maupun sebagian.
Berdasarkan pengertian di atas maka dapat disimpulkan bahwa bangun merupakan kegiatan membangun sistem dan komponen baru yang didasarkan pada spesifikasi desain.
2.1.3 Pengertian Rancang Bangun
Rancang bangun (desain) adalah tahap setelah analisis dari siklus pengembangan sistem yang merupakan pendefenisian dari kebutuhan–kebutuhan fungsional, serta menggambarkan bagaimanan suatu sistem dibentuk yang dapat berupa penggambaran, perencanaan dan pembuatan sketsa atau pengaturan dari beberapa elemen yang terpisah ke dalam satu kesatuan yang utuh dan berfungsi, termasuk menyangkut mengkonfigurasikan dari komponen–komponen perangkat keras dan perangkat lunak dari suatu sistem.
Berdasarkan pengertian di atas, maka dapat disimpulkan bahwa rancang bangun merupakan kegiatan menerjemahkan hasil analisis ke dalam bentuk
perangkat lunak, kemudian menciptakan sistem tersebut ataupun memperbaiki sistem yang sudah ada sebelumnya [5].
2.2 Sistem Mekanik
Sistem mekanik adalah sistem yang terdiri dari elemen-elemen yang berinteraksi secara prinsip mekanika. Mekanika adalah cabang fisika yang memfokuskan pada perilaku benda ketika dikenai gaya serta efeknya terhadap lingkungan.
Pada dasarnya sistem penggerak (actuator) terbagi menjadi 2 jenis. Ada jenis yang bergerak berdasarkan rotasi (putaran) dan ada juga actuator linear yang bergerak lurus.
A. Yang bergerak berdasarkan rotasi yaitu:
1. Motor DC
Adalah jenis penggerak yang menggunakan arus searah (DC) sebagai tenaganya. Arus searah ini nantinya akan dimanfaatkan oleh kumparan yang ada di dalamnya dan menjadi energi mekanik. Kumparan itu disebut stator (bagian yang tidak berputar), dan bagaian yang berputar disebut rotor. Motor DC dapat dilihat pada gambar 2.1 di bawah ini.
Gambar 2. 1 Motor DC 2. Geared Motor DC
Ini adalah pengembangan dari DC motor, yang membedakan adalah dengan adanya penambahan komponen gear pada motor. Gear ini berfungsi untuk menambah torsi (tenaga) pada motor atau juga bisa menambah kecepatan.
Geared motor DC dapat dilihat pada gambar 2.2 di bawah ini.
Gambar 2. 2 Geared motor DC 3. Motor servo
Pengembangan dari DC motor juga dan sudah memiliki gear, tetapi bedanya motor servo bisa diatur kecepatannya. Di dalamnya terdapat potensio meter dan driver motor, sehingga bisa diatur dengan derajat. Motor servo bisa digunakan untuk membuat robot berkaki. Motor servo dapat dilihat pada gambar 2.3 di bawah ini.
Gambar 2. 3 Motor servo 4. Smart servo
Pengembangan dari motor servo atau jenis servo yang lebih pintar. Dimana di dalamnya sudah terdapat controller sendiri. Smart servo dapat dilihat pada gambar 2.4 di bawah ini.
Gambar 2. 4 Smart servo 5. Motor stepper
Prinsip kerja motor stepper ini sama seperti motor DC, sama-sama menggunakan arus searah (DC). Akan tetapi stepper tidak berputar 360 derajat dalam satu step melainkan berputar dalam beberapa step. Untuk berputar 360 derajat, stepper bertahap 45 derajat dahulu dan dilanjutkan ke 45 derajat begitu seterusnya. Tergantung dari jenis dan spesifikasi motor stepper. Motor stepper dapat dilihat pada gambar 2.5 di bawah ini.
Gambar 2. 5 Motor stepper B. Yang bergerak berdasarkan linear yaitu:
1. Linear actuator
Sesuai namanya gerakan dari linear actuator adalas jenis motor DC yang bergerak linear atau maju mundur. Gerakan maju mundur tersebut didapat dari hasil perpindahan dari roda gigi dengan motor DC rotary. Linear
actuator juga tentu memiliki feedback yang dikirimkan ke controller, membantu mempermudah pengendalian. Linear actuator dapat dilihat pada gambar 2.6 di bawah ini.
Gambar 2. 6 Linear actuator 2. Solenoid
Adalah kumparan yang dililitkan memanjang dan panjangnya jauh lebih besar dari diameter kawatnya. Yang membedakan solenoid dengan linear actuator tidak menggunakan DC motor ataupun gear untuk menghasilkan gerakan linear, tapi memang bentuknya sudah berbeda, bentuknya dibuat untuk bisa bergerak linear. Solenoid dalam aplikasi sehari-hari biasanya digunakan untuk pengunci pintu rumah otomatis. Solenoid dapat dilihat pada gambar 2.7 di bawah ini.
Gambar 2. 7 Selenoid
3. Pneumatic
Adalah jenis actuator yang memanfaatkan tekanan udara untuk menghasilkan gerakan mekanik linear. Untuk aplikasinya pneumatic digunakan untuk pekerjaan ringan seperti pintu bus. Pneumatic dapat dilihat pada gambar 2.8 di bawah ini.
Gambar 2. 8 Pneumatic 4. Hydraulic
Merupakan jenis actuator yang mirip dengan pneumatic, hanya saja hydraulic menggunakan fluida atau oil yang dimanfaatkan untuk menghasilkan gerakan mekaniknya. Dan untuk aplikasinya juga pneumatic biasa digunakan untuk pekerjaan berat pada industri [7]. Hydraulic dapat dilihat pada gambar 2.9 di bawah ini.
Gambar 2. 9 Hydraulic
2.3 Boom Gate
Boom gate merupakan alat yang memiliki fungsi sebagai palang otomatis yang biasanya digunakan di area parkir, gerbang gedung-gedung perkantoran, gedung pemerintahan, kantor kepolisian, hotel, jalan tol dan tempat umum lainnya[4]. Barrier gate unit boom gate atau palang digerakan oleh tenaga atau torsi motor listrik yang terpasang pada dudukan plat. Torsi motor dirancang untuk arus bolak balik sehingga tidak memerlukan limit switch atau Pembatas aliran. Boom gate dapat dilihat pada gambar 2.10 di bawah ini.
Gambar 2. 10 Boom gate
Menurut sistem penggunaannya, barrier gate dibagi menjadi 3, yaitu:
1. Semi automatic
Proses bekerja atau buka tutup barrier gate dengan masih menggunakan tombol push button oleh pengguna parkir. Sistem ini yang paling umum digunakan pada sistem parkir yang ada di Indonesia. Boom gate semi automatic dapat dilihat pada gambar 2.11 di bawah ini.
Gambar 2. 11 Boom gate semi automatic
2. Automatic
Proses bekerja atau buka tutup barrier gate terhubung dengan komputer dan dikendalikan oleh operator aplikasi parkir. Sistem ini tidak menggunakan bantuan tenaga dari pengguna parkir, melainkan dikendalikan oleh operator dari pengelola parkir melalui perangkat komputer. Sistem barrier gate untuk tipe automatic ditunjukkan pada gambar 2.12 di bawah ini.
Gambar 2. 12 Sistem barrier gate automatic 3. Full automatic
Proses bekerja untuk buka tutup barrier gate terhubung dengan komputer dan secara automatic terbuka atau tertutup dengan menggunakan access control Seperti yang ditunjukkan pada Gambar 2.13 di bawah ini [6].
Gambar 2. 13 Sistem barrier gate full automatic 2.4 Motor Listrik
Motor listrik adalah alat yang berfungsi untuk mengubah energi listrik menjadi energi mekanik. Sedangkan alat yang berfungsi sebaliknya, yaitu mengubah
energi mekanik menjadi energi listrik disebut generator atau dinamo. Motor listrik dapat ditemukan pada peralatan rumah tangga seperti kipas angin, mesin cuci, pompa air dan penyedot debu. Pada motor listrik prinsipnya yaitu energi listrik diubah menjadi energi mekanik. Perubahan ini dilakukan dengan mengubah tenaga listrik menjadi magnet yang disebut sebagai elektro magnetik. Sebagaimana kita ketahui bahwa kutub-kutub dari magnet yang senama akan tolak-menolak dan kutub-kutub tidak senama, tarik-menarik. Maka kita dapat memperoleh gerakan jika kita menempatkan sebuah magnet pada sebuah poros yang dapat berputar dan magnet yang lain pada suatu kedudukan yang tetap.
2.4.1 Jenis-Jenis Motor Listrik
Pada dasarnya motor listrik terbagi menjadi 2 jenis yaitu motor listrik DC dan motor listrik AC. Kemudian dari jenis tersebut digolongkan menjadi beberapa klasifikasi lagi sesuai dengan karakteristiknya. Adapun jenis-jenis motor listrik yang umum digunakan di dunia industri antara lain:
1) Motor Listrik AC
Motor listrik AC adalah jenis motor yang menggunakan tegangan dengan arus bolak-balik atau arus AC. Biasanya motor jenis ini memiliki ukuran yang lebih besar dibandingkan dengan motor DC. Motor listrik AC dibedakan menjadi dua macam, yakni motor sinkron dan motor induksi. Berikut pembagianya:
(a) Motor sinkron, adalah jenis motor AC yang bekerja pada kecepatan tetap dengan sistem frekwensi tertentu. Walaupun motor ini merupakan motor AC, namun tetap memerlukan arus DC sebagai pembangkitan daya. Motor ini memiliki torsi awal yang rendah, sehingga cocok untuk penggunaan awal dengan beban rendah.
(b) Motor induksi, adalah jenis motor listrik AC yang bekerja berdasarkan induksi pada medan magnet yang berada di antara rotor dan stator. Motor induksi dapat dibedakan lagi menjadi dua macam, yakni motor induksi satu fasa dan juga motor induksi tiga fasa. Motor induksi satu fasa hanya memiliki satu gulungan stator dan dapat berjalan dengan pasokan daya satu fasa. Sedangkan motor induksi tiga fasa adalah jenis motor induksi bekerja dengan pasokan daya listrik tiga fasa seimbang.
Motor induksi tiga fasa memiliki kemampuan daya yang lebih tinggi.
2) Motor Listrik DC
Motor listrik DC adalah jenis motor yang menggunakan tegangan dengan arus searah atau arus DC. Biasanya motor jenis ini memiliki ukuran yang lebih kecil dibandingkan dengan motor AC. Motor listrik DC dibedakan menjadi dua macam, yakni motor sumber daya terpisah atau separately excited dan motor sumber daya sendiri atau self excited.
(a) Motor sumber daya terpisah adalah jenis motor DC yang sumber arus medannya disupply dari sumber yang terpisah. Oleh sebab itu motor jenis ini disebut juga dengan motor separately excited.
(b) Motor Sumber Daya Sendiri (Self Excited) adalah jenis motor DC yang sumber arus medannya disupply dari sumber yang sama dengan kumparan motor listrik[8].
b. Rumus menghitung daya motor listrik:
2.1
Dengan:
P = Daya Motor Listrik (Watt) T = Torsi motor listrik (Nm) n = Putaran motor listrik (rpm) 2.4.2 Perhitungan Pada Motor DC
A. Kecepatan Linier dan Kecepatan Sudut
Jika waktu yang dibutuhkan untuk menempuh lintasan satu lingkaran adalah T dan menempuh jarak sejauh 2πR maka kelajuan benda untuk mengelilingi lintasan dinyatakan dalam V = s/T, inilah yang dinyatakan sebagai kecepatan linier.
Sedangkan kecepatan sudut (angular) dinotasikan dengan ω merupakan perubahan perpindahan sudut per satuan waktu. Untuk menyatakan kecepatan sudut sering dinyatakan dalam radian. Sebagai contoh radian per second (rps) atau radian per menit (rpm).
2.2
secara umum hubungan kecepatan linear (V) dan kecepatan sudut (ω) dapat dinyatakan pada persamaan 2.3 sebagai berikut:
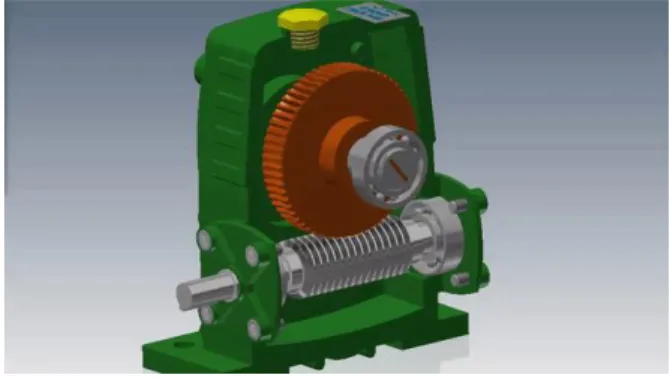
2.3 2.5 Speed Reducer (Gearbox)
Gearbox dalam hal penggunaannya banyak terdapat pada bidang kebutuhan industri atau permesinan. Dalam beberapa unit mesin memiliki sistem pemindah tenaga yaitu gearbox yang berfungsi untuk menyalurkan tenaga atau daya mesin ke salah satu bagian mesin lainnya, sehingga unit tersebut dapat bergerak menghasilkan sebuah pergerakan baik putaran maupun pergeseran. Gearbox merupakan suatu alat khusus yang diperlukan untuk menyesuaikan daya atau torsi (momen/daya) dari motor yang berputar dan gearbox juga adalah alat pengubah daya dari motor yang berputar menjadi tenaga yang lebih besar.
Gearbox atau transmisi adalah salah satu komponen utama motor yang disebut sebagai sistem pemindah tenaga, transmisi berfungsi untuk memindahkan dan mengubah tenaga dari motor yang berputar yang digunakan untuk memutar poros input gearbox. Transmisi juga berfungsi untuk mengatur kecepatan gerak dan torsi serta berbalik putaran sehingga dapat bergerak maju dan mundur [9].
Transmisi manual atau lebih dikenal dengan sebutan gearbox, mempunyai beberapa fungsi:
1. Merubah momen puntir yang akan diteruskan ke spindel mesin.
2. Menyediakan rasio gigi yang sesuai dengan beban mesin.
3. Menghasilkan putaran mesin tanpa selip. Gearbox dapat dilihat pada gambar 2.14 di bawah ini.
Gambar 2.14 Gearbox
a) Cara kerja speed reducer (gearbox)
Prinsip kerjanya sangat sederhana hanya dua buah unit komponen utama yang terdiri dari poros yang dihubungkan dengan mesin penggerak dan satu buah poros lagi dihubungkan dengan mesin utama. Maksud mesin utama ini adalah mesin/peralatan seperti mesin pencacah atau mesin-mesin lainnya.
b) Fungsi speed reducer (gearbox)
Gearbox atau speed reducer mempunyai beberapa fungsi antara lain:
1) Gearbox Merubah momen puntir yang akan diteruskan ke spindel mesin.
2) Gearbox Menyediakan rasio gigi yang sesuai dengan beban mesin.
3) Gearbox Menghasilkan putaran mesin tanpa slip.
c) Kelebihan dan Kekurangan speed reducer 1) Kelebihan speed reducer
(a) Daya yang ditransmisikan dapat diatur dengan rasio/perbandingan.
(b) Gerakan tidak mudah selip.
(c) Dapat mentransmisikan daya dengan akurat.
(d) Dapat beroperasi dengan kecepatan yang sangat tinggi.
(e) Cendrung bersifat kokoh/kakuh.
2) Kekurangan Speed reducer (gearbox)
(a) Gearbox memerlukan perawatan berupa lubrikasi.
(b) Gearbox memerlukan kelurusan yang teliti.
(c) Gearbox dapat menimbulkan suara yang berisik.
Untuk menghitung rasio gearbox dapat dilakukan dengan menggunakan persamaan 2.4 di bawah ini.
2.4 2.5.1 Komponen Utama Gearbox
Gearbox mempunyai beberapa komponen pendukung yang menyebabkan gearbox dapat bekerja secara optimal. Komponen–komponen tersebut antara lain:
1. Rumah gearbox
Rumah–rumah gear terdiri dari dua potongan yang terbuat dari besi cor yang didesain dengan torsi yang kaku dan memberikan bentuk juga karakteristik getaran dan juga temperature. Rumah–rumah dilengkapi dengan dimensi yang mudah di angkat juga penutup untuk inspeksi.
2. Komponen gigi
Unit komponen roda gigi terbuat dari baja sepuhan atau baja dengan lapisan keras. Dengan kemiringan dan tingkatan gear yang berhubungan.
Level getaran dari unit gear diminimalisir sekecil mungkin dapat bermanfaat untuk menjaga kualitas sistim roda gigi. Roda gigi disatukan pada poros dengan perantaraan yang pas dan tekanan paralael.
3. Sistem pelumasan
Sistem pelumasan ini berguna untuk menjaga agar gearbox tidak macet karena kekurangan pelumas. Pelumas juga berfungsi untuk menjaga agar komponen dari gearbox tidak aus dan keropos karena oksidasi.
2.6 Torsi
Torsi adalah ukuran kemampuan mesin untuk melakukan kerja, jadi torsi adalah suatu energi. Besaran torsi adalah besaran turunan yang biasa digunakan untuk menghitung energi yang dihasilkan dari benda yang berputar pada porosnya.
Adapun perumusan dari torsi adalah sebagai berikut. Apabila suatu benda berputar dan mempunyai besar gaya sentrifugal sebesar F, benda berputar pada porosnya dengan jari-jari sebesar b, dengan data tersebut torsinya adalah:
2.5 Untuk mencari gaya (F) dapat dilakukan dengan menggunakan persamaan di bawah ini.
2.6 Dimana:
T = Torsi benda berputar (N.m)
F = Adalah gaya sentrifugal dari benda yang berputar (N) l = Adalah jarak benda ke pusat rotasi (m)
m = Massa (kg) g = Gravitasi (m/ )
Karena adanya torsi inilah yang menyebabkan benda berputar terhadap porosnya dan benda akan berhenti apabila ada usaha melawan torsi dengan besar sama dengan arah yang berlawanan. Dari definisi disebutkan bahwa perkalian antara gaya dengan jaraknnya adalah sebuah torsi, dengan difinisi tersebut torsi pada poros dapat diketahui dengan persamaan 2.7 di bawah ini:
T = w d (Nm) 2.7 Dimana:
T = Adalah torsi mesin (Nm) w = Gaya Berat (N)
d = Adalah jarak pembebanan dengan pusat perputaran (m)
Dari perhitungan torsi diatas dapat diketahui jumlah energi yang dihasikan mesin pada poros. Jumlah energi yang dihasikan mesin setiap waktunya adalah yang disebut dengan daya mesin. Kalau energi yang diukur pada poros mesin dayanya disebut daya poros [10].
2.7 Bearing (Bantalan)
Bantalan adalah elemen mesin yang mampu menumpu poros berbeban, sehingga gesekan bolak-baliknya dapat berlangsung secara halus, aman dan panjang usia pemakaiannya. Bantalan harus cukup kokoh untuk memungkinkan poros suatu mesin bekerja dengan baik.
Jika bantalan tidak berfungsi dangan baik maka efisiensi seluruh sistem akan menurun atau tak dapat bekerja secara semestinya. Pillow block dapat dilihat pada gambar 2.15 di bawah ini.
Gambar 2.15 Pillow Block
Jenis- jenis bantalan:
a. Berdasarkan gerakan bantalan terhadap poros
Bantalan luncur
Pada bantalan ini terjadi gesekan luncur antara poros dan bantalan karena permukaan poros ditumpu oleh permukaan bantalan dengan perantaraan lapisan pelumas. Bantalan luncur dapat dilihat pada gambar 2.16 di bawah ini.
Gambar 2.16 Bantalan luncur
Bantalan gelinding
Pada bantalan ini terjadi gesekan gelinding antara bagian yang berputar dengan yang diam melalui elemen gelinding seperti bola, roll dan roll bulat.
Bantalan gelinding dapat dilihat pada gambar 2.17 di bawah ini.
Gambar 2.17 Bantalan gelinding b. Berdasarkan arah beban terhadap poros
Bantalan radial
Arah beban yang ditumpu bantalan ini adalah tegak lurus sumbu poros.
Bantalan aksial
Arah beban bantalan ini sejajar dengan sumbu poros.
Bantalan gelinding khusus
Bantalan ini dapat menumpu beban yang arahnya sejajar dan tegak lurus sumbu poros. Meskipun bantalan gelinding menguntungkan, Banyak konsumen memilih bantalan luncur dalam hal tertentu, Contohnya bila kebisingan bantalan mengganggu pada kejutan yang kuat dalam putaran bebas.
c. Berdasarkan elemen gelinding
Bantalan gelinding mempunyai keuntungan dari gesekan gelinding yang sangat kecil dibandingkan dengan bantalan luncur. Elemen gelinding seperti bola atau roll dipasang di antara cicin luar dan cincin dalam.
Dengan memutar salah satu cincin tersebut bola atau roll akan membuat gesekan gelinding sehingga gesekan diantaranya akan jauh lebih kecil. Untuk bola atau roll, ketelitian tinggi dalam bentuk dan ukuran merupakan keharusan, karena luas bidang kontak antara bola atau roll dengan cincinya sangat kecil maka besarnya beban persatuan luas atau tekananya menjadi sangat tinggi. Dengan demikian bahan yang digunakan harus mempunyai ketahanan dan kekerasan yang tinggi.
Adapun perbandingan antara bantalan luncur dengan bantalan gelinding yaitu: Bantalan luncur mampu menumpu poros berputaran tinggi dengan beban besar, sedangkan bantalan gelinding lebih cocok untuk beban kecil daripada bantalan luncur, tergantung pada bentuk elemen gelindingnya.
2.7.1 Prediksi Umur Bantalan
Dalam memilih bearing, umur bearing sangat perlu diperhatikan. Ada beberapa definisi mengenai umur bearing, yaitu:
1. Umur (life)
Didefinisikan sebagai jumlah putaran yang dapat dicapai dari bearing sebelum mengalami kerusakan atau kegagalan yang pertama pada masing–
masing elemennya seperti roll atau bola ring.
2. Umur berdasarkan kepercayaan (rating life)
Didefinisikan sebagai umur yang dicapai berdasarkan kepercayaan (reliability) 90 % berarti dianggap 10 % kegagalan dari jumlah putaran.
Umur ini disimbolkan dengan L10 dalam jumlah perputaran atau L10h dengan satuan jam dengan anggapan putarannya konstan.
3. Basis kemampuan menerima beban (Basic load rating)
Disebut juga dengan basic load rating (Beban dinamik) diartikan sebagai beban yang mampu diterima dalam keadaan dinamis berputar dengan jumlah putaran konstan putaran dengan ring luar tetap dan ring dalam yang berputar.
4. Kemampuan menerima beban statis (basic static load rating)
Didefinisikan sebagai jumlah beban static radial yang mempunyai hubungan dengan defleksi total yang terjadi secara permanen pada elemen–elemen bearingnya, yang diberikan tekanan, disimbolkan dengan C0.
2.8 Poros
Poros (Shaft) adalah suatu bagian stasioner yang berputar, biasanya berpenampang bulat, dimana terpasang elemen-elemen seperti roda gigi, pulley, roda gila (flywheel), engkol, sprocket dan elemen transmisi daya lainnya. Poros bisa menerima beban-beban lenturan, tarikan, tekan, atau puntiran, yang bekerja sendiri-sendiri atau berupa gabungan satu dengan lainnya. Bila beban tersebut tergabung, bisa dicari kekuatan statis dan kekuatan lelah yang diperlukan untuk pertimbangan perencanaan. Poros dapat dilihat pada gambar 2.18 di bawah ini.
Gambar 2.18 Poros
Macam-macam poros berdasarkan pembebanannya:
1. Poros Transmisi (Transmission Shafts)
Poros transmisi lebih dikenal dengan sebutan shaft. Shaft akan mengalami beban puntir berulang, beban lentur berganti ataupun kedua-duanya. Pada shaft, daya dapat ditransmisikan melalui gear, belt pulley, sprocket rantai, dll.
2. Poros gandar
Poros gandar merupakan poros yang dipasang diantara roda-roda kereta barang. Poros gandar tidak menerima beban puntir dan hanya mendapat beban lentur.
3. Poros Spindle
Poros spindle merupakan poros transmisi yang relatif pendek, misalnya pada poros utama mesin perkakas dimana beban utamanya berupa beban puntiran.
Selain beban puntiran, poros spindle juga menerima beban lentur (axial load).
Poros spindle dapat digunakan secara efektif apabila deformasi yang terjadi pada poros tersebut kecil.
Pada perhitungan poros, kita menganalisa setiap gaya yang ada pada poros.
Untuk memudahkan perhitungan gaya-gaya yang ada pada poros dibagi menjadi dua bagian, yaitu gaya arah horizontal dan gaya arah vertikal. Untuk setiap arah gaya yang digambarkan dengan arah ke atas bernilai positif (+) dan untuk setiap arah gaya yang digambarkan dengan arah ke bawah bernilai negatif (-). Sedangkan untuk momen yang putarannya CCW (berlawanan arah jarum jam) bernilai positif (+) dan untuk momen yang putarannya CW (searah jarum arah jarum jam) bernilai negatif (-).
Pembebanan yang terjadi pada poros tergantung pada besarnya daya dan putaran mesin yang diteruskan dan juga pengaruh gaya yang ditimbulkan oleh bagian-bagian mesin yang didukung dan ikut berputar bersama poros. Beban lentur serta beban aksial disebabkan oleh gaya-gaya radial dan aksial yang timbul sedangkan beban punter disebabkan oleh daya dan putaran mesin.
2.8.1 Hal – hal yang diperhatikan perencanaan poros
Untuk merencanakan sebuah poros, hal–hal berikut ini perlu diperhatikan:
1. Kekuatan poros
Suatu poros dapat mengalami beban puntir atau lentur atau gabungan antara beban puntir dan juga beban lentur. Juga ada poros yang mendapat beban tarik atau tekan seperti poros baling–baling kapal atau turbin, dll.
Sebuah poros harus direncanakan dengan baik hingga cukup kuat untuk menahan beban–beban yang terjadi.
2. Kekakuan poros
Meskipun sebuah poros mempunyai kekuatan yang cukup besar akan mengakibatkan getaran dan suara. Karena itu, kekuatan poros terhadap puntir juga diperhatikan dan disesuaikan dengan macam beban mesin yang akan ditopang poros tersebut.
3. Putaran kritis
Putaran kritis yaitu ketika putaran mesin dinaikkan dan terjadi getaran yang cukup besar. Oleh sebab itu poros harus direncanakan sedemikian rupa sehingga putaran poros lebih rendah dari putaran kritis.
4. Korosi
Bahan-bahan yang dipilih yaitu bahan yang bersifat tidak korosif karena ini akan menyebabkan kekuatan pada poros menurun karena korosi/karat dan memperpendek umur komponen [11].
2.8.2 Kekuatan poros
Hasil diameter poros yang dirancang harus diuji kekuatannya. Pemeriksaan dapat dilakukan dengan memeriksa tegangan geser yang terjadi akibat tegangan puntir yang dialami poros. Jika tegangan geser lebih besar dari tegangan geser izin dari bahan tersebut, maka perancangan tidak akan menghasilkan hasil yang baik atau dengan kata lain perancangan adalah gagal.
2.9. Sprocket and Chain 2.9.1 Sprocket
Sprocket adalah roda bergerigi yang berpasangan dengan rantai, track atau benda panjang yang bergerigi lainnya. Sprocket berbeda dengan roda gigi; sprocket tidak pernah bersinggungan dengan sproket lainnya dan tidak pernah cocok. Sprocket juga berbeda dengan puli dimana sprocket memiliki gigi sedangkan puli pada umumnya tidak memiliki gigi. Sprocket yang digunakan pada sepeda, sepeda motor,
mobil, kendaraan roda rantai dan mesin lainnya digunakan untuk mentransmisikan gaya putar antara dua poros di mana roda gigi tidak mampu menjangkaunya.
Pada sepeda, pengubahan rasio kecepatan putar secara keseluruhan dilakukan dengan memvariasikan diameter dari sprocket. Perubahan diameter sprocket akan mengubah jumlah gigi dari sprocket. Misal, sepeda dengan 10 speed bisa didapatkan dengan menggunakan dua sproket pada poros penggerak dan 5 sprocket pada poros roda. Rasio kecepatan yang rendah menguntungkan pengguna sepeda di jalan yang menanjak, sedangkan rasio kecepatan yang tinggi memudahkan untuk bergerak cepat di jalan yang datar.
Pada sepeda motor, tidak ada pengubahan diameter sprocket ketika bergerak.
Namun perubahan diameter sprocket secara manual mampu mengubah tingkat akselerasi dan kecepatan tertinggi dari sepeda motor.
Untuk menghitung rasio kecepatan dan juga rasio gigi, dapat dihitung dengan menggunakan persamaan 2.8 di bawah ini.
2.8
2.9.2 Chain (Rantai)
Rantai Adalah salah satu komponen yang mentransmisikan tenaga mekanik dari satu tempat ke tempat lain dan sering dipakai untuk memutar roda kendaraan, khususnya sepeda dan sepeda motor dan juga dalam berbagai mesin selain kendaraan rantai tersambung dengan sprocket dengan gigi meshing yang masuk ke lubang di link rantai.
Rantai sebagian besar digunakan untuk mengirimkan gerakan dan daya dari satu poros ke poros yang lain, seperti ketika jarak pusat antara poros pendek seperti pada sepeda, sepeda motor, mesin pertanian, konveyor, dll. Rantai mungkin dapat juga digunakan untuk jarak pusat yang panjang. Bagian-bagian rantai dapat dilihat pada gambar 2.19 berikut.
Gambar 2.19 Bagian-bagian rantai 2.10 Hubungan Roda-Roda
Roda merupakan instrumen pengubah gerak melingkar ke gerak lurus atau sebaliknya. Faktanya mobil itu bisa bergerak lurus karena ada gerak melingkar yang bekerja pada roda. Roda-roda tersebut tidak berdiri sendiri, tetapi mungkin saja mereka berhubungan seperti roda gigi kayuh sepeda dengan gigi yang menyatukan roda belakang sepeda, ban kendaraan dengan peleknya, dan juga gigi-gigi roda yang membantu jam kuno untuk bergerak. Dalam menganalisis hubungan roda-roda, yang penting adalah kecepatan sudut, jari-jari, dan kecepatan linier. Dari hubungan ini dapat juga kita ketahui bahwa hubungan roda-roda dapat dibagi menjadi 3 yaitu : Hubungan roda-roda seporos, hubungan roda-roda bersinggungan, dan hubungan roda-roda yang dihubungkan dengan sabuk (tali atau rantai)[13].
a) Hubungan Roda-Roda Seporos
Hubungan roda seporos dapat dilihat pada gambar 2.10 di bawah ini.
Gambar 2. 20 Hubungan roda-roda seporos
Hubungan roda-roda ini memiliki arah putar yang sama, sekaligus kecepatan sudutnya juga sama. Sehingga dapat diambil kesimpulan :
ω 1 = ω 2 atau v1.r1 = v2.r2 (2.9) b) Hubungan roda-roda bersinggungan
Hubungan roda-roda bersinnggungan dapat dilihat pada gambar 2.11 di bawah ini
Gambar 2. 21 Hubungan roda-roda bersinggungan
Hubungan roda-roda ini memiliki arah putar berlawanan antara roda-rodanya, dan memiliki kelajuan linear yang sama sehingga dapat disimpulkan :
v 1 = v 2 atau ω1.r1 = ω2.r2 (2.10)
c) Hubungan roda-roda yang dihubungkan dengan sabuk
Hubungan roda-roda yang dihubungkan dengan sabuk dapat dilihat pada gambar 2.12 di bawah ini.
Gambar 2. 22 Hubungan roda-roda yang dihubungkan dengan sabuk
Hubungan roda-roda yang dihubungkan dengan sabuk ini memiliki arah putar yang searah, dan kelajuan linear yang sama sehingga dapat disimpulkan sebagai berikut :
v 1 = v 2 atau ω1.r1 = ω2.r2 (2.11)
Untuk lebih jelasnya tabel hubungan roda-roda dapat dilihat pada tabel dibah ini.
Tabel 2. 1 Hubungan roda-roda
2.10.1 Gerak Melingkar Berubah Beraturan
Gerak melingkar dengan α konstan disebut gerak melingkar berubah beraturan (GMBB). Pada gerak melingkar berubah beraturan terdapat 2 macam percepatan, yaitu percepatan tangensial (ar) dan percepatan sentripetal (as)[14].
2.11 Cara kerja relay
Gambar 2. 23 Bagian-bagian Relay
Pada saat kumparan elektromagnet yang dibagian dalamnya terdapat sebuah logam ferromagnetis mendapati aliran arus listrik. Maka secara otomatis akan muncul sebuah medan magnet sementara. Yang dimana medan magnet tersebut akan menarik tuas armature sehingga akan merubah posisi dari kontak switch dari NC (Normally Clossed) menjadi NO (Normally Open)[12].
Gambar 2. 24 Relay
Pada relay yang digunakan terdapat 8 buah pin, pada pin 2 dan 7 merupakan arus listrik yang mengalir menuju kumparan untuk menghasilkan elektromagnetik.
Pada pin 1 dan 8 merupakan arus listrik yang akan mengalir menuju motor listrik.
Pin 3,4,5 dan 6 merupakan arus listrik yang mengalir dari baterai, dan akan diteruskan menuju pin 1 dan 8, dimana terdapat sebuah tuas yang dapat berpindah- pindah. Ketika pin 3 dan 6 yang mengalir menuju pin 1 dan 8, maka motor akan berputar searah jarum jam. sedangkan jika pin 4 dan 5 yang mengalir terhadap pin 1 dan 8 maka motor listrik akan berputar berlawanan arah jarum jam.
BAB 3
METODOLOGI PENELITIAN
3.1 Metode desain
Perancangan (Desain) merupakan langkah awal dari usaha untuk merealisasikan suatu produk. Setelah perancangan selesai dilakukan, maka selanjutnya dilakukan pembuatan produk. Sistem mekanik boom gate (portal parkir) dirancang hingga dibangun/fabrikasi menjadi satu kesatuan.
Rancang bangun sistem mekanik boom gate ini memiliki manfaat dalam menyumbangkan penelitian dalam ilmu engineering. Disamping itu juga memiliki manfaat bagi masyarakat khusunya pada parkir, gerbang tol, dll. Sistem mekanik boom gate dapat dilihat pada gamabr 3.1 di bawah ini.
Gambar 3.1 Sistem mekanik boom gate 3D
Desain dari sistem mekanik boom gate digambar menggunakan software CAD (Computer Aided Design). Desain sistem mekanik boom gate juga digambar dalam bentuk 2D. Desain sistem mekanik boom gate dalam bentuk 2D dapat dilihat pada gambar 3.2 di bawah ini.
(a)
(b)
(c) (d)
Gambar 3.2 Desain 2D sistem mekanik boom gate
(a) Pandangan depan (b) Pandangan atas (c) Pandangan kiri (d) Pandangan isometrik
Seperti diagram alir yang telah dibuat sebelumnya bahwasannya setelah dilakukan proses perhitungan dan perancangan akan dilakukan proses desain dengan menggunakan software CAD (Computer Aided Design). Hal ini dilakukan agar dapat mengetahui gambaran alat yang akan dibuat. Desain sistem mekanik boom gate dapat dilihat pada gambar 3.3 di bawah ini.
Keterangan gambar:
(1) Rangka (8) Transmission Shaft
(2)Motor Dc (9) Kopling Poros
(3) Kopling Gearbox (10) Palang
(4) Rantai (11) Sprocket Besar
(5) Poros (12) Gearbox
(6) Setelan Poros (13) Sprocket Kecil (7) Pillow Block (14) Plat Penutup
Gambar 3.3 Desain Boom Gate
Berikut ini merupakan tahapan desain alat dengan menggunakan software CAD (Computer Aided Design).
1. Desain rangka
Rangka dari alat ini berfungsi sebagai tempat dudukan komponen-komponen sistem mekanik lainnya. Dibuat dengan menggunakan besi hollow kotak 4 x 4 cm.
Proses desain rangka ini dibuat dengan menggambar terlebih dahulu part-part besi hollow sesuai dengan ukuran yang diinginkan lalu dilakukan proses assembly dengan menyatukan setiap part nya. Desain rangka dapat dilihat pada gambar 3.4 di bawah ini.
Gambar 3.4 Desain rangka boom gate
Untuk tabel desain rangka dapat dilihat pada tabel 3.1 di bawah ini.
Tabel 3.1 Dimensi rangka boom gate
Nama Symbol Dimensi Satuan
Panjang P 350 Mm
Lebar L 350 Mm
Tinggi T 850 Mm
2. Assembly setiap komponen
Setelah part-part setiap komponen telah digambar. Akan dilakukan proses assembly. Dengan tujuan untuk menyatukan setiap komponen yang telah digambar sebelumnya hingga menjadi seperti alat yang akan difabrikasi nantinya. Assembly setiap komponen dapat dilihat pada gambar 3.5 di bawah ini.
Gambar 3.5 Assembly setiap part
3.1.1 Perencanaan Komponen Sistem Mekanik Boom Gate
Perencanaan dilakukan dengan menghitung serta memilih komponen yang paling sesuai dengan kebutuhan. Komponen-komponen yang direncankan ialah:
1. Motor 2. Gearbox 3. Sprocket 4. Bantalan
5. Poros
1. Perencanaan motor penggerak
Motor penggerak berfungsi sebagai penggerak awal dari sistem mekanik boom gate. Dikarenakan sistem mekanik boom gate ini menggunakan baterai, maka motor penggerak yang dipilih ialah motor DC. Pemilihan motor dilakukan dengan pertimbangan sebagai berikut:
a. Daya, torsi dan putaran harus lebih besar dari yang dibutuhkan.
b. Menggunakan arus searah (DC).
c. Mudah ditemukan di pasaran.
d. Dimensi motor harus disesuaikan dengan dimensi rangka.
Sehingga dalam perancangan ini dipilih motor penggerak dengan spersifikasi:
Motor DC
Tegangan(V)= 24V Daya(P)= 250W Putaran(n)= 2750 rpm.
2. Perencanaan gearbox
Gearbox berfungsi untuk memindahkan dan mengubah tenaga dari motor yang berputar. Sekaligus memiliki fungsi untuk mengatur kecepatan putar dan mengatur torsi, serta dapat membolak balikkan putaran sehingga dapat bergerak maju mundur. Gearbox yang akan dipilih harus memiliki rasio putar yang bisa menurunkan putaran sampai mendekati kecepatan putar yang diinginkan. Gearbox yang akan dibeli juga harus mudah ditemukan dipasaran agar tidak mempersulit proses fabrikasi dari alat. Sehingga gearbox yang dipilih ialah:
- Gearbox type 40 - Rasio 1:60.
3. Perencanaan sprocket
Sprocket berfungsi untuk meneruskan putaran dan juga dapat digunakan untuk menaikkan dan menurunkan kecepatan putar. Pemilihan sprocket harus dilakukan dengan mempertimbangkan perbandingan jumlah gigi dari sprocket itu sendiri sehingga dapat disesuaikan dengan keinginan. Dari perhitungan, perbandingan sprocket yang dipilih ialah 1:4,5. Dengan demikian sprocket yang dipilih ialah sprocket 10 gigi dan sprocket 45 gigi.
4. Perencanaan bantalan
Pada perancangan alat ini digunkan bantalan dengan type ball bearing, dengan alasan bantalan ini dapat menahan dua jenis beban yaitu jenis beban radial dan jenis beban aksial. Karena dalam operasi hanya beberapa bola atau kadang- kadang hanya satu bola yang menanggung beban radialnya. Sehingga bola-bala yang lain dapat berfungsi menahan beban aksialnya. Disamping itu bantalan ini juga mempunyai kemampuan menyesuaikan diri bila terjadi ketidaksesuain atau ketidaksenteran sumbu poros dengan sumbu bantalan akibat adanya defleksi poros atau adanya perubahan penurunan pondasi. Adapun pillow block (bearing) yang digunakan pada alat memiliki spesifikasi:
Pillow block bearing UCP 206 Material : Cast Iron
Size : 206 AS : 30 mm
Dimension : 42.9 × 165 × 121 mm
5. Perencanaan poros
Dalam pembuatan sistem mekanik boom gate dibutuhkan komponen poros.
Poros berfungsi untuk meneruskan torsi/putaran yang dihasilkan oleh sistem penggerak. Sehingga palang dapat berputar naik dan turun. Poros yang digunakan pada sistem mekanik boom gate ini memiliki spesifikasi:
Panjang : 310 mm Diameter : 30 mm
Bahan : Besi assental ST41 AS Putih
3.2 Fabrikasi sistem mekanik boom gate
Pembangunan (fabrikasi) sistem mekanik boom gate adalah proses yang dilakukan setelah proses desain selesai. Fabrikasi merupakan proses perakitan bahan- bahan hingga menjadi satu kesatuan alat sistem mekanik boom gate.
Berikut merupakan tahapan pembangunan sistem mekanik boom gate:
1. Pembuatan rangka boom gate dengan menggunakan besi hollow kotak berukuran 40 mm × 40 mm dengan tebal besi 2 mm.
2. Pemotongan plat 4 mm yang digunakan untuk tempat motor DC, gearbox dan juga plat untuk tempat pillow block.
3. Pemasangan motor DC, gearbox pada tempat yang telah disediakan. Dimana poros motor DC terlebih dahulu dihubungkan dengan poros input dari gearbox.
4. Pemasangan poros terhadap bearing pillow block dan meletakkan pillow block bearing pada plat yang telah disediakan.
5. Pemasangan setelan poros pada palang.
6. Pemasangan sprocket pada poros output gearbox dan juga memasang sprocket pada poros yang terhubung pada transmission shaft palang.
7. Memotong rantai lalu memasang pada sprocket.
8. Memasang transmission shaft terhadap poros.
9. Memasang palang.
10. Merakit dan memasang rangkaian sistem control 3.3 Tempat dan Waktu
3.3.1 Tempat
Pelaksanaan kegiatan penelitian ini dilaksanakan di Laboratorium Imfact and Fracture Research Center dan Laboratorium Proses Produksi Departemen Teknik Mesin Fakultas Teknik Universitas Sumatera Utara.
3.3.2 Waktu
Penelitian ini dilakukan pada bulan November 2020 hingga September 2021.
3.4 Peralatan dan Bahan 3.4.1 Peralatan
Peralatan yang digunakan untuk pembuatan boom gate ini dapat dilihat pada tabel 3.2 di bawah ini
Tabel 3. 2 Peralatan
No Nama alat Fungsi Gambar
1 Gerinda tangan Digunakan untuk memotong benda kerja, mengasah dan merapikan bentuk benda.
2 Mesin las listrik Digunakan untuk menyambung besi rangka supaya menjadi satu rangkaian yang utuh sehingga dapat membentuk suatu rangka yang kuat.
3 Mesin bor Digunakan untuk membuat lubang pada besi, kayu, tembok dan berbagai jenis media lainnya.
4 Mesin Bubut Digunakan untuk memotong dan membentuk benda dengan cara diputar.
5 Laptop Digunakan untuk mendesain alat dengan menggunakan software.
Spesifikasi : a. Lenovo
b. Processor Intel Core I5 7th Gen 4 GB RAM DDR3
c. OS : Microsoft Windows 10
3.4.2 Bahan
Bahan yang digunakan dalam pembuatan boom Gate ini dapat dilihat pada tabel 3.3 di bawah ini
Tabel 3. 3 Bahan No Nama
Bahan
Fungsi Gambar
1 Besi Kotak Digunakan untuk membuat rangka dari portal parkir