ANALISA PERPINDAHAN PADA
STRUKTUR DENGAN EXCEL DAN
CALCULATOR
Pratikto, ST, MSi
Jurusan Teknik Sipil
Politeknik Negeri Jakarta
BUKU AJAR
ANALISA PERPINDAHAN
PADA STRUKTUR DENGAN
EXCEL DAN CALCULATOR
(Untuk Program Studi Teknik Konstruksi Gedung)
PRATIKTO
NIP. 19610725 198903 1 002
JURUSAN TEKNIK SIPIL
Didanai dengan DIPA PNJ Tahun 2010
POLITEKNIK NEGERI JAKARTA
NOPEMBER, 2010
LEMBAR PENGESAHAN
1. Judul : Metode Perpindahan dengan Excel dan Calculator
2. Penulis
a. Nama : PRATIKTO .ST, MsI.
b. NIP : 19610725 198903 1 002
c. Jenis kelamin : Laki-Laki d. Golongan/pangkat : IV a e. Jabatan Fungsional : Lektor f. Mata Kuliah yang diampu
Semester gasal : Mekanika Teknik 5 : Kerja Proyek Perencanaan Semester genap : Kontruksi Beton 1
; Lab Uji Bahan
g. Jurusan/Program Studi : Teknik Sipil/Teknik Konstruksi Gedung h. Alamat rumah : Jl. Kakap3 , P15 ; RT3/8 ; Mampang Indah I
DEPOK 16433
Alamat email : pratikto.tito@gmail.com
pratikto@ymail.com
3. Jumlah Anggota : -
4. Lama kegiatan penulisan : 5 (Iima) bulan
5. Biaya yang diperlukan : Rp.3.500.000,- (Tiga Juta Lima Ratus Ribu Rupiah)
6. Sumber dana : DIPA PNJ 2010
Depok, 14 Juni, 2010
Menyetujui, Pelaksana
Ketua Program Studi,
A.Rudi Hermawan, ST,MT PRATIKTO., ST, MSi.
NIP.19660118 199011 1 001 NIP.19610725 198903 1 002
Mengetahui
Ketua Jurusan,
Sidiq Wacono, ST, MT. NIP. 19640107 198803 1 001
PRAKATA
ALHAMDULILLAH, Segala puji syukur penulis panjatkan kehadirat Tuhan Yang
Maha Esa, karena anugerah-Nya kami dapat menyelesaikan penulisan diktat ini yang berjudul
“ ANALISA PERPINDAHAN PADA STRUKTUR DENGAN EXCEL DAN
CALCULATOR
“ .
Tulisan ini membahas mengenai analisa struktur dengan menggunakan dengan alat bantu hitung seperti komputer dengan lembar kerja microsoft office excel ataupun kalkulator. Dasar teori metode perpindahan akan dibahas pada bab 2 yang akan dilanjutkan aplikasinya pada : Struktur rangka batang bab 3 dan Balok baik statis tertentu ataupun statis tak tentu pada bab 4. Pada bab5 pembaca akan diajak untuk mengaplikasikan pada portal bentuk sederhana yang terdiri dari elemen struktur seperti balok dan kolom. Pada tahap ini diberikan tugas untuk menyelesaikan struktur Portal bertingkat dengan bantuaan lembar kerja excel yang terdapat pada komputer. Untuk bentuk yang tidak beraturan sepeti portal dengan kaki miring dibahas pada bab 6. Masalah ini biasanya digunakan untuk menganalisa struktur tangga 2 dimensi
Dalam kesempatan ini penulis mengucapkan terima kasih yang sedalam-dalamnya kepada semua pihak yang telah membantu penulisan ini terutama kepada mahasiswa Jurusan Teknik Sipil Jurusan Teknik Sipil PNJ, yang telah membantu kami dalam penyelesaian penelitian ini.
Kami menyadari bahwa penulisan laporan ini masih jauh dari sempurna, maka kami mengharapkan kritik dan saran untuk perbaikan dimasa yang akan datang.
Akhir kata penulis berharap semoga tulisan kami ini bermanfaat bagi masyarakat..
PENDAHULUAN
1.1 Gambaran Umum Mata Kuliah I-1 1.2 Hubungan Mata Kuliah dengan yang lain I-1 1.3 Tujuan Pembelajaran Umum I-2
1.4 Petunjuk Buku Ajar I-2
MODUL 1
DASAR METODE PERPINDAHAN
2.1 Pendahuluan II-1
2.2. Tujuan Pembelajaran Khusus II-3
2.3 Kegiatan Belajar II-3
2.3.1 Dasar Teori Perpindahan II-3 2.3.1.1 Pembagian elemen II-5
2.3.1.2 Beban Ekwivalen II-5
2.3.1.3 Pembentukan Matrik Kekakuan II-6 2.3.1.4 Solusi Persamaan Linear II-7
2.4 Rangkuman II-7
2.5 Daftar Pustaka II-8
MODUL 2
RANGKA BATANG
3.1 Pendahuluan III-1
3.2 Tujuan Pembelajaran Khusus III-1
3.3 Kegiatan Belajar III-2
3.3.1 Perpindahan Batang III-2
3.3.1.1 Matrik Deformasi dan Statis III-3
3.3.1.2 Beban Ekwivalen III-4
3.3.1.3 Pembentukan Matrik Kekakuan III-4 3.3.1.4 Solusi Persamaan Linear III-5
3.3.2 Latihan III-5
3.3.3 Tugas III-6
3.3.4 Evaluasi III-7
3.4 Rangkuman III-10
3.5 Daftar Pustaka III-11
MODUL 3
BALOK
4.1 Pendahuluan IV-1
4.2. Tujuan Pembelajaran Khusus IV-1
4.3 Kegiatan Belajar IV-1
4.3.1 Deformasi Balok IV-1
4.3.1.1 Pembagian elemen IV-3
4.3.1.2 Beban Ekwivalen IV-3
4.3.1.3 Pembentukan Matrik Kekakuan IV-5
4.3.1.4Momen Akhir IV-5
4.3.2 Latihan IV-6
4.3.3 Tugas IV-8
4.3.4 Evaluasi IV-8
4.4 Rangkuman IV-10
4.5 Daftar Pustaka IV-11
MODUL 4
PORTAL
5.1 Pendahuluan V - 1
5.2. Tujuan Pembelajaran Khusus V - 1
5.3 Kegiatan Belajar V - 2
5.3.1 Portal Tak Bergoyang V - 3 5.3.1.1 Pembagian elemen V - 3
5.3.1.2 Beban Ekwivalen V - 4
5.3.1.3 Pembentukan Matrik Kekakuan V - 4
5.3.1.4 Persamaan Linear V - 5
5.3.3 Latihan V - 10 5.3.4 Tugas V – 13 5.3.5 Evaluasi V - 15 5.4 Rangkuman V - 18 5.5 Daftar Pustaka V - 18 MODUL 5 PORTAL MIRING 6.1 Pendahuluan VI - 1
6.2. Tujuan Pembelajaran Khusus VI - 1
6.3 Kegiatan Belajar VI - 2
6.3.1 Deformasi Lentur Portal Miring VI - 3 6.3.1.1 Pembagian elemen VI - 3
6.3.1.2 Beban Ekwivalen VI - 4
6.3.1.3 Pembentukan Matrik Kekakuan VI - 4 6.3.1.4 Solusi Persamaan Linear VI - 4
6.3.2 Latihan VI - 5 6.3.3 Tugas VI - 13 6.3.4 Evaluasi VI - 13 6.4 Rangkuman VI - 18 6.5 Daftar Pustaka VI - 18 LAMPIRAN 1. Istilah LAMPIRAN 2.Kalkulator CFX 9850 GB LAMPIRAN 3.GBPP Mekanika Teknik 5 LAMPIRAN 4. Daftar Tabel dan Daftar Gambar
V - 1
MODUL 4
BAB V. PORTAL
5.1 Pendahuluan
Portal adalah bagian struktur dengan elemen yang berupa balok dan kolom baik miring ataupun tegak. Portal yang akan dibahas pada bab ini adalah portal dengan bentuk beraturan. Semakin banyak jumlah lantai – tingkat pada portal , hal ini akan mengakibatkan semakin besar ukuran matrik pada lembar kerja excel. Sebagai pengontrol dari ukuran matrik yang besar disarankan melakukan dengan hati hati perhatikan untuk tidak terdapat sel kosong, ukuran matrik dan sifat matrik. Bila salah satu sel terdapat angka yang aneh atau salah akan berkibat pada hasil matrik berikutnya. Berbeda denga rangka batang yaitu yang hanya mempunyai deformasi aksial , pada portal ini umumnya deformasi aksial diabaikan dengan catatan bahwa nilainya sangat kecil sekali. Sehingga yang terjadi pada konstruksi portal adalah deformasi anguler-sudut dan pergoyangan horizontal. Kolom portal merupakan bagian yang utama didalam menganalisa gaya horizontal. Untuk analisa portal dengan kolom yang miring akan dibahas pada bab berikutnya. Perilaku untuk balok portal ini sama dengan balok yang yang sudah dibahas pada bab sebelumnya. Bila posisi sumbu balok searah dengan gravitasi maka dinamakan kolom sehingga perilakunya sama dengan balok disertai pergoyangan pada arah tegak lurus sumbu balok.
.
5.2 Tujuan Pembelajaran Khusus
Tujuan pada bab ini adalah menganalisa portal sampai mendapatkan besarnya gaya dalam baik momen , lintang ataupun normal. Menganalisa pergoyangan portal dengan mencari deformasi putaran sudut pada kolom akibat pergoyangan. Mengatur dan mengoperasikan analisa perhitungan matrik dengan ukuran ataupun sejumlah data yang besar. Mengontrol hasil perhitungan portal berdasarkan Kesetimbangan dan Kekakuan. Untuk masalah Kekuatan dipersilahkan meninjau pada bab kekuatan bahan elemen.
d1 d3 d2 d4 Putaran sudut : d1= d2 = Δ/L d3= d4 = Δ/L 5.3 Kegiatan Belajar
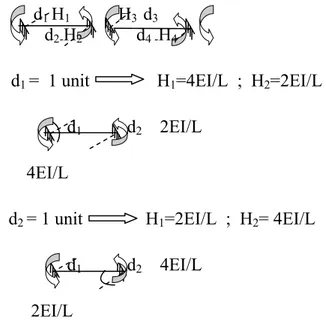
Perilaku untuk portal bertingkat sangat berbeda dengan struktur Rangka Batang. Pada portal terdiri dari balok dan kolom sehingga deformasi untuk portal ini terdiri dari balok dan kolom. Untuk balok sudah dibahas pada bab II yang akan direview pada bab ini disertai dengan pembahasan deformasi untuk kolom. Untuk balok :
d1 H1 H3 d3
d2-H2 d4 -H4
d1 = 1 unit H1=4EI/L ; H2=2EI/L
d1 d2 2EI/L
4EI/L
d2 = 1 unit H1=2EI/L ; H2= 4EI/L
d1 d2 4EI/L
2EI/L
Gambar 5.1 kekakuan elemen balok
Untuk Kolom merupakan kombinasi balok dan perpindahan horizontal atau pergoyangan. Akibat pergeseran Δ= 1 unit akan mengakibatkan deformasi putaran sudut d1 sebesar Δ/L ( kenapa?) d2 =d1. Untuk balok tidak ada perubahan akibat axial deformasi
L
Gambar 5.2 Pergoyangan Portal
V - 3
5.3.1 Portal Tak Bergoyang
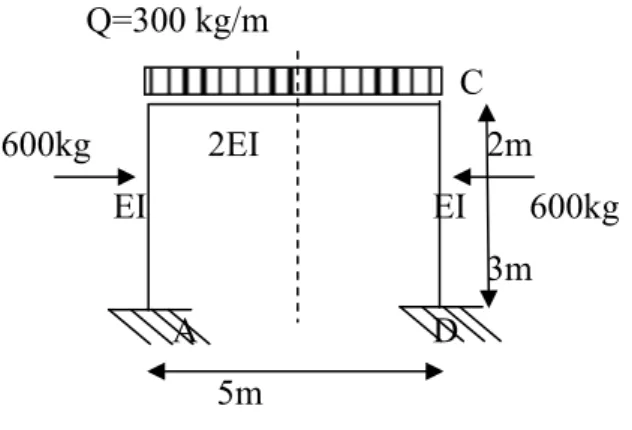
Apakah yang dimaksud dengan struktur yang simetris? Struktur dikatakan simetris bila seolah olah terdapat satu sumbu putar baik dari geometris struktur ataupun beban yang bekerja. Pada portal yang simetris tidak akan terjadi pergoyangan gambar 5.3 portal simetris.
Q=300 kg/m
B C given structure.
600kg 2EI 2m Draw the internal forces. EI EI 600kg
3m
A D
5m
Gambar 5.3 portal simetris.
5.3.1.1 Pembagian elemen Q1- D1 Q2-D2 2 kinematis 3 elemen a) Diagram Q-D b) 3 elemen H3-d3 H4- d4 H2 H5 d5 d2 d1-H1 H6-d6 c) Diagram Hd
5.3.1.2 Beban Ekwivalen 1/12 q l2 = 1/12 300 52 = 625 P ab2 / L2 = 600 3 22 / 52 = 288 Q1 Q2 625 625 -193 +193 432 432 288 288
Gambar 5.5 Beban ekwivalen
{Q} = ⎭⎬ ⎫ ⎩ ⎨ ⎧− 193 193
5.3.1.3 Pembentukan Matrik Kekakuan
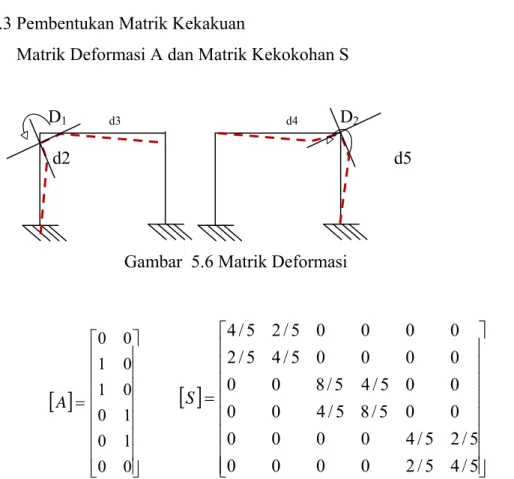
Matrik Deformasi A dan Matrik Kekokohan S
D1 d3 d4 D2
d2 d5
Gambar 5.6 Matrik Deformasi
[ ]
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = 0 0 1 0 1 0 0 1 0 1 0 0 A[ ]
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = 5 / 4 5 / 2 0 0 0 0 5 / 2 5 / 4 0 0 0 0 0 0 5 / 8 5 / 4 0 0 0 0 5 / 4 5 / 8 0 0 0 0 0 0 5 / 4 5 / 2 0 0 0 0 5 / 2 5 / 4 SV - 5 5.3.1.4 Persamaan Linear [K] = [A]t [S][A] = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥⎦ ⎤ ⎢⎣ ⎡ 6 2 2 6 5 2EI [K]-1 = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − 2 6 2 6 ) 4 36 ( 2 5 EI {D} = [K]-1 {Q} = [K]-1 ⎭⎬ ⎫ ⎩ ⎨ ⎧− 193 193 = ⎭⎬= ⎫ ⎩ ⎨ ⎧ 2 1 D D ⎭ ⎬ ⎫ ⎩ ⎨ ⎧− EI EI 8 / 965 8 / 965 {H} = [S][A]{D} = ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ − − − = ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ 25 . 48 5 . 96 5 . 96 5 . 96 5 . 96 25 . 48 6 5 4 3 2 1 H H H H H H {M}={H} –{FEM} = ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ − − − = ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ − − − − ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ 75 . 239 5 . 528 5 . 528 5 . 528 5 . 528 75 . 239 288 432 625 625 432 . 288 6 5 4 3 2 1 H H H H H H
Perhatikan tanda pada matrik {M} bukan tanda untuk bidang momen 528.5 528.5
239.75 239.75
Free Body(exercise) Gambar 5.7 Hasil gaya dalam moment
528.5
720 239.75
Bidang Momen Bidang Lintang (exercise) Gambar 5.8 Bidang MDN
5.3.2 Portal Bergoyang
Pada umumnya struktur yang simetris banyak dijumpai pada peninjauan akibat beban gravitasi dan tidak demikian untuk beban arah mendatar. Dengan ber asumsi bahwa tidak terjadi perubahan panjang pada balok maka yang mengandung perpindahan sudut atau putaran sudut hanya pada elemen kolom. Mengenai besarnya sudut yang kecil ini secara matematis dapat dianggap sama dengan besarnya tangen sudut tersebut.
P=1000 kg
B C given structure.
600kg 2EI 400kg Draw the internal forces. EI EI 4m
A D
4m
V - 7 5.3.2.1 Pembagian elemen Q2-D2 Q3-D3 Q1- D1 3 kinematis 3 elemen a) Diagram Q-D b) 3 elemen H3-d3 H4- d4 H2 H5 d5 d2 d1-H1 H6-d6 c) Diagram Hd
Gambar 5.10 pembagian elemen.
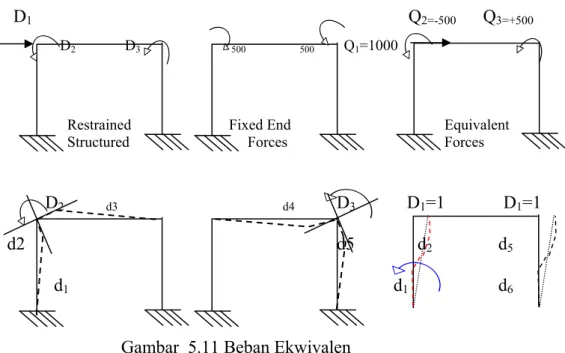
5.3.2.2 Beban Ekwivalen
D1 Q2=-500 Q3=+500
D2 D3 500 500 Q1=1000
Restrained Fixed End Equivalent Structured Forces Forces
D2 d3 d4 D3 D1=1 D1=1
d2 d5 d2 d5
d1 d1 d6
5.3.2.3 Pembentukan Matrik Kekakuan
[ ]
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = 0 0 4 / 1 1 0 4 / 1 1 0 0 0 1 0 0 1 4 / 1 0 0 4 / 1 A[ ]
S EI ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = 4 / 4 4 / 2 4 / 2 4 / 4 4 / 8 4 / 4 4 / 4 4 / 8 4 / 4 4 / 2 4 / 2 4 / 4 H3-d3 H4- d4 H2 H5 d5 d2 d1-H1 H6-d6 Gambar 5.12 H-d Diagram [K] = [A]t [S][A] = /2 6 2 4 / 3 2 6 4 / 3 4 / 3 4 / 3 4 / 3 EI ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡5.3.2.4 Solusi Persamaan Linear {D} = [K]-1 {Q} = EI EI 1/ 69 . 57 69 . 557 05 . 3282 500 500 1000 156 1 63 15 48 15 63 48 48 48 512 ⎪ ⎭ ⎪ ⎬ ⎫ ⎪ ⎩ ⎪ ⎨ ⎧ − − = ⎪ ⎭ ⎪ ⎬ ⎫ ⎪ ⎩ ⎪ ⎨ ⎧ − ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − − −
V - 9 {H} = [S][A]{D} = ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ − − = ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ 92 . 1201 07 . 1173 07 . 673 07 . 1173 07 . 673 92 . 951 6 5 4 3 2 1 H H H H H H {M}={H} – {FEM} = ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ − − = ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ + − − ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ 92 . 1201 07 . 1173 07 . 1173 07 . 673 07 . 673 92 . 951 0 0 500 500 0 . 0 6 5 4 3 2 1 H H H H H H 673.07 1173.07 1000 406.25 593.75 500 500 593.75 406.25 593.75 593.75 406.25 593.75 461.54 951.92 1201.92 93.75 1093.75 38.46 406.25 593.75961.54 Free Body 1173.07 673.07 1/4PL= 1000 951.92 1201.92
Bidang Momen Bidang Lintang n Normal (exercise)
5.3.3 Latihan
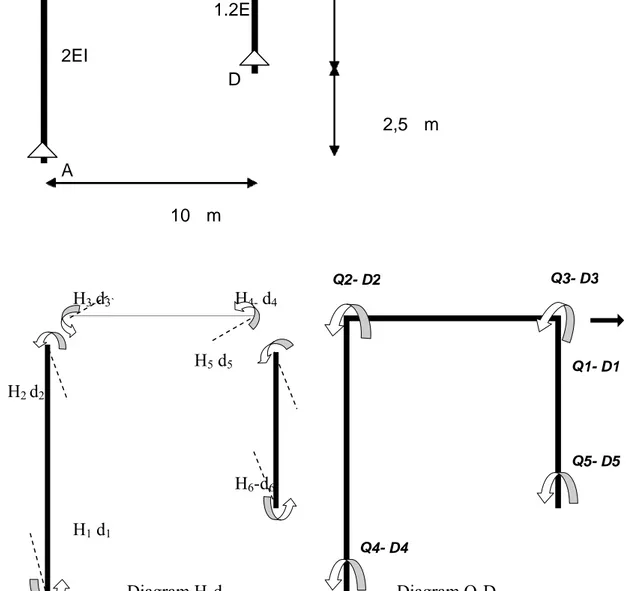
GAMBAR kan DIAGRAM GAYA DALAM 40 kN B 3EI C 7,5 m 1.2EI 2EI D 2,5 m A 10 m H3-d3` H4- d4 H5 d5 H2 d2 H6-d6 H1 d1 Diagram H-d Diagram Q-D
Gambar 5.14 Portal Beban Horizontal
Q1- D1
Q2- D2 Q3- D3
Q5- D5
V - 11
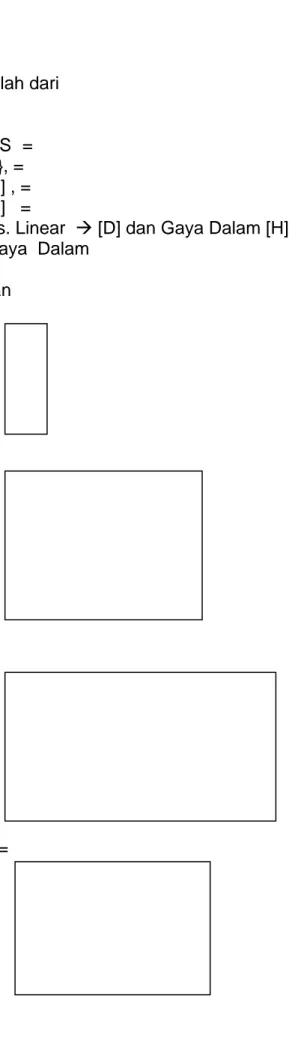
1. Hitung jumlah dari Elemen =
KINEMATIS = Ukuran {Q}, =
[A] , = [S] =
Solusi Pers. Linear Æ [D] dan Gaya Dalam [H] Gambar Gaya Dalam
2. Perhitungan Q = A= 6*5 S = 6 x 6 K = At SA =
3. Solusi D =
4. Gaya Dalam Portal
{H} = SA D - M Primer H =
5. Gambar Gaya Dalam
-163,72 -177,21 40 163,72 177,21 0,00 0,00 -177,21 163,72
V - 13
5.3.4 Tugas
GAMBAR kan DIAGRAM GAYA DALAM
Fc' = 25 Mpa Fy = 400 Mpa kolom 400 400 tinggi 4000 mm 4 m balok 400 600 bentang 6000 7000 6000 _portal.xls/sheet1
Persiapkan Data perhitungan , Beban , dimensi , mutu bahan dsbnya. Fc’ (Mpa) =
Fy (Mpa) =
Beban Q (DL) ; Q(LL) ; Q(EQ) Dari dimensi untuk Inersia ( EI )
1. Hitung jumlah dari
Elemen = ; KINEMATIS = Ukuran {Q}, =
[A] , = [S] =
Solusi Pers. Linear Æ [D] dan Gaya Dalam [H] Gambar Gaya Dalam
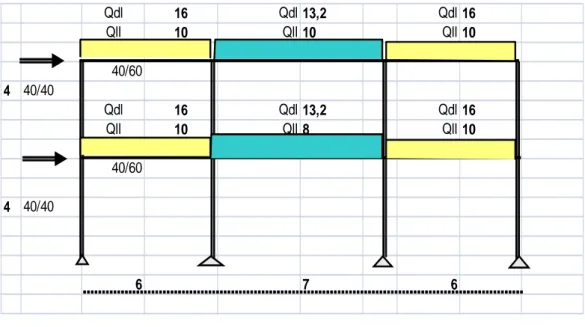
Qdl 16 Qdl 13,2 Qdl 16 Qll 10 Qll 10 Qll 10 40/60 4 40/40 Qdl 16 Qdl 13,2 Qdl 16 Qll 10 Qll 8 Qll 10 40/60 4 40/40 6 7 6
2. Perhitungan Q = 14x1 A= 28x14 S = 28 x 28 K = At SA = 14x14 3. Solusi D = 14x1
Gaya Dalam Portal
{H} = SA D - M Primer Gambar Gaya Dalam
V - 15 5.3.5 Evaluasi DL LL HL DL LL HL DL LL HL DL LL HL DL LL HL 1 30 0 8,138 18,731 30 -11,269 2 10,83 0 0,301 9,875524 -30 39,876 3 -10,83 0 -0,301 0,291871 40,83 -40,538 4 -30 0 -8,138 -0,29187 -40,83 40,538 5 30 0 6,263 -9,87552 30 -39,876 6 10,83 0 0,723 -18,731 -30 11,269 7 -10,83 0 -0,723 14,97134 30 -15,029 8 -30 0 -6,263 8,711859 -30 38,712 0,000 9 0 0 -3,131 0,701714 40,83 -40,128 10 0 0 -0,362 -0,70171 -40,83 40,128 11 0 0 0,362 -8,71186 30 -38,712 12 0 0 3,131 -14,9713 -30 15,029 13 0 75 0,000 11,269 0 11,269 14 0 50 0,000 10,33158 0 10,332 15 0,662606 0 0,663 16 0,873865 0 0,874 17 -0,66261 0 -0,663 18 -0,87387 0 -0,874 19 -11,269 0 -11,269 20 -10,3316 0 -10,332 21 4,697083 0 4,697 22 2E-15 0 0,000 23 0,542562 0 0,543 24 1,33E-15 0 0,000 25 -0,54256 0 -0,543 26 -1E-15 0 0,000 27 -4,69708 0 -4,697 28 2,22E-16 0 0,000
Q beban kerja DEFORMASI ( D ) H = SA * D F E M ( M Primer ) M AKHIR
1 2 3 4 5 6 7 8 9 10 11 12 13 14 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 2 0 1 0 0 0 0 0 0 0 0 0 0 0 0 3 0 1 0 0 0 0 0 0 0 0 0 0 0 0 4 0 0 1 0 0 0 0 0 0 0 0 0 0 0 5 0 0 1 0 0 0 0 0 0 0 0 0 0 0 6 0 0 0 1 0 0 0 0 0 0 0 0 0 0 7 0 0 0 0 1 0 0 0 0 0 0 0 0 0 8 0 0 0 0 0 1 0 0 0 0 0 0 0 0 9 0 0 0 0 0 1 0 0 0 0 0 0 0 0 10 0 0 0 0 0 0 1 0 0 0 0 0 0 0 11 0 0 0 0 0 0 1 0 0 0 0 0 0 0 12 0 0 0 0 0 0 0 1 0 0 0 0 0 0 13 1 0 0 0 0 0 0 0 0 0 0 0 -0,25 0,25 14 0 0 0 0 1 0 0 0 0 0 0 0 -0,25 0,25 15 0 1 0 0 0 0 0 0 0 0 0 0 -0,25 0,25 16 0 0 0 0 0 1 0 0 0 0 0 0 -0,25 0,25 17 0 0 1 0 0 0 0 0 0 0 0 0 -0,25 0,25 18 0 0 0 0 0 0 1 0 0 0 0 0 -0,25 0,25 19 0 0 0 1 0 0 0 0 0 0 0 0 -0,25 0,25 20 0 0 0 0 0 0 0 1 0 0 0 0 -0,25 0,25 21 0 0 0 0 1 0 0 0 0 0 0 0 0 -0,25 22 0 0 0 0 0 0 0 0 1 0 0 0 0 -0,25 23 0 0 0 0 0 1 0 0 0 0 0 0 0 -0,25 24 0 0 0 0 0 0 0 0 0 1 0 0 0 -0,25 25 0 0 0 0 0 0 1 0 0 0 0 0 0 -0,25 26 0 0 0 0 0 0 0 0 0 0 1 0 0 -0,25 27 0 0 0 0 0 0 0 1 0 0 0 0 0 -0,25 28 0 0 0 0 0 0 0 0 0 0 0 1 0 -0,25
A
Q1-D1 Q2-D2 Q3-D3 Q4-D4 Q13-D13 H1 H2 H3 H4 H5 H6 13 15 17 19 Q5-D5 Q6-D6 Q7-D7 Q8-D8 14 16 18 20 Q14-D14 H7 H8 H9 H10 H11 H12 Q9-D9 Q10-D10 Q11-D11 Q12-D12 21 23 25 27 22 24 26 28 DIAGRAM Q - D DIAGRAM H - dMatrik S
Matrik K
Gaya Dalam Portal
{H} = SA D - M Primer Lihat tabel diatas
Gambar Gaya Dalam MDN
1 2 3 4 5 6 7 8 9 10 11 12 13 14 1 3,26 1,13 0 0 0,5 0 0 0 0 0 0 0 -0,375 0,375 2 1,13 5,2 0,97 0 0 0,5 0 0 0 0 0 0 -0,375 0,375 3 0 0,97 5,2 1,13 0 0 0,5 0 0 0 0 0 -0,375 0,375 4 0 0 1,13 3,26 0 0 0 0,5 0 0 0 0 -0,375 0,375 5 0,5 0 0 0 4,26 1,13 0 0 0,5 0 0 0 -0,375 0 6 0 0,5 0 0 1,13 6,2 0,97 0 0 0,5 0 0 -0,375 0 7 0 0 0,5 0 0 0,97 6,2 1,13 0 0 0,5 0 -0,375 0 8 0 0 0 0,5 0 0 1,13 4,26 0 0 0 0,5 -0,375 0 9 0 0 0 0 0,5 0 0 0 1 0 0 0 0 -0,375 10 0 0 0 0 0 0,5 0 0 0 1 0 0 0 -0,375 11 0 0 0 0 0 0 0,5 0 0 0 1 0 0 -0,375 12 0 0 0 0 0 0 0 0,5 0 0 0 1 0 -0,375 13 -0,375 -0,375 -0,375 -0,375 -0,375 -0,375 -0,375 -0,375 0 0 0 0 0,75 -0,75 14 0,375 0,375 0,375 0,375 0 0 0 0 -0,375 -0,375 -0,375 -0,375 -0,75 1,5
K =
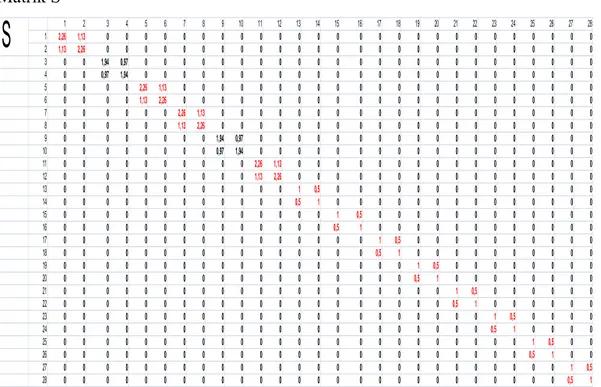
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 1 2,26 1,13 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 2 1,13 2,26 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 3 0 0 1,94 0,97 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 4 0 0 0,97 1,94 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 5 0 0 0 0 2,26 1,13 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 6 0 0 0 0 1,13 2,26 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 7 0 0 0 0 0 0 2,26 1,13 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 8 0 0 0 0 0 0 1,13 2,26 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 9 0 0 0 0 0 0 0 0 1,94 0,97 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 0 0,97 1,94 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 11 0 0 0 0 0 0 0 0 0 0 2,26 1,13 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 12 0 0 0 0 0 0 0 0 0 0 1,13 2,26 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 13 0 0 0 0 0 0 0 0 0 0 0 0 1 0,5 0 0 0 0 0 0 0 0 0 0 0 0 0 0 14 0 0 0 0 0 0 0 0 0 0 0 0 0,5 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 15 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0,5 0 0 0 0 0 0 0 0 0 0 0 0 16 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,5 1 0 0 0 0 0 0 0 0 0 0 0 0 17 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0,5 0 0 0 0 0 0 0 0 0 0 18 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,5 1 0 0 0 0 0 0 0 0 0 0 19 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0,5 0 0 0 0 0 0 0 0 20 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,5 1 0 0 0 0 0 0 0 0 21 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0,5 0 0 0 0 0 0 22 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,5 1 0 0 0 0 0 0 23 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0,5 0 0 0 0 24 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,5 1 0 0 0 0 25 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0,5 0 0 26 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,5 1 0 0 27 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0,5 28 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0,5 1S
V - 17
Bidang Momen
Bidang Lintang
5.4 Rangkuman
Secara garis besarnya , langkah2 metode ini adalah :
1. Memilih elemen-elemen dan menentukan kinematis struktur D Untuk pergoyangan portal mempunyai kinematis tersendiri. 2. Buat Diagram Q-D dan H-d dan tentukan arah positip
Gunakan penomoran yang mudah untuk di kontrol 3. Tentukan matrik A , S dan Q
4. Perhitungan matrik [K] , [K]-1 dan {D} 5. Matrik gaya dalam [H} = [SA] {D}. 6. Gaya Dalam = {H} - M Primer
7. Gambar gaya dalam M, D, N. Ingat tanda positip yang dipakai
5.5 Daftar Pustaka
1. Supartono F.X, dan Boen T ; Analisa Struktur dengan Metode Matrix, Fakultas Teknik universitas Indonesia, UI Press, 1984
2. Wang , C.K : “ Matrix methods of Structural Analysisa” Scrantons International Text Book Co., 1986
VI - 1
MODUL 5
BAB VI. PORTAL MIRING
6.1 Pendahuluan
Portal adalah bagian struktur dengan elemen yang berupa balok dan kolom baik miring ataupun tegak. Semakin banyak jumlah kinematis pada portal , hal ini akan mengakibatkan semakin besar ukuran matrik pada lembar kerja excel. Sebagai pengontrol dari ukuran matrik yang besar disarankan melakukan dengan hati hati perhatikan untuk tidak terdapat sel kosong, ukuran matrik dan sifat matrik. Bila salah satu sel terdapat angka yang aneh atau salah akan berkibat pada hasil matrik berikutnya. Pada rangka batang yaitu yang hanya mempunyai
deformasi aksial dan portal biasa dengan deformasi lentur dimana deformasi
aksial diabaikan dengan catatan bahwa nilainya sangat kecil sekali. Pada Portal miring akibat pergoyangan , geometris elemen mengakibatkan komponen horizontal harus diperhatikan sehubungan dengan panjang elemen yang tidak berubah. Sehingga yang terjadi pada konstruksi portal adalah deformasi anguler-sudut dan pergoyangan horizontal dan untuk portal miring pergoyangan translasi yang terjadi diurai menjadi komponen yang horizontal dan vertikal.
Beberapa contoh aplikasi portal miring pada bangunan teknik sipil adalah : rangka atap , tangga dansebagainya. Untuk rangka atap bangunan yang menggunakan bentang panjang dengan profil baja umumnya disebut sebagai
Gable-frame . Pengaruh dari elemen struktur yang miring , baik kolom atao balok
akan mengakibatkan translasi yang mempunyai dua komponen yaitu : vertikal dan mendatar.
.
6.2 Tujuan Pembelajaran Khusus
Tujuan pada bab ini adalah menganalisa portal miring sampai mendapatkan besarnya gaya dalam baik momen , lintang ataupun normal dari portal miring. Menganalisa pergoyangan portal miring dengan mencari deformasi putaran sudut pada kolom akibat pergoyangan yang mempunyai dua komponen vertikal dan
horizontal . Mengatur dan mengoperasikan analisa perhitungan matrik dengan
ukuran ataupun sejumlah data yang besar. Mengontrol hasil perhitungan portal miring berdasarkan Kesetimbangan dan Kekakuan.
6.3 Kegiatan Belajar
Perilaku untuk portal bertingkat sangat berbeda dengan struktur Rangka Batang. Pada portal terdiri dari balok dan kolom sehingga deformasi untuk portal ini terdiri dari balok dan kolom. Perbedaan dari portal miring dengan portal biasa adalah komponen yang mendatar dan vertikal dari pergoyangan atau translasi portal. Untuk balok sudah dibahas pada bab II yang akan direview pada bab ini disertai dengan pembahasan deformasi untuk kolom.
Untuk balok :
d1 H1 H3 d3
d2-H2 d4 -H4
d1 = 1 unit H1=4EI/L ; H2=2EI/L
d1 d2 2EI/L
4EI/L
d2 = 1 unit H1=2EI/L ; H2= 4EI/L
d1 d2 4EI/L
2EI/L
gambar 6.1 kekakuan elemen balok
Untuk Kolom merupakan kombinasi balok dan perpindahan horizontal atau pergoyangan. Akibat pergeseran Δ= 1 unit akan mengakibatkan deformasi putaran sudut d1 sebesar Δ/L ( kenapa?) d2 =d1. Untuk balok tidak ada perubahan akibat axial deformasi tetapi translasi arah vertikal. Bedakan antara deformasi axial (
VI - 3 d1 d3 d2 d4 Putaran sudut : d1= d2 = Δ/L d3= d4 = Δ/L
perubahan) dengan translasi ( pergeseran) . Besarnya sudut adalah Δ/L dengan catatan bahwa Δ adalah komponen yang tegak lurus dengan sumbu elemen ,balok.
L
gambar 6.2 Pergoyangan Portal 6.3.1. Deformasi Lentur Portal Miring
perhatikan
1. Translasi
2. Tidak ada axial deformasi
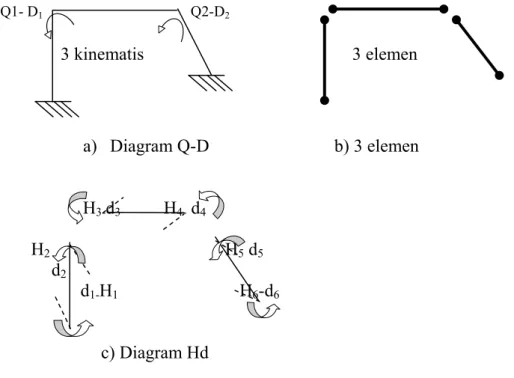
gambar 6.3 Pergoyangan Portal Miring 6.3.1.1 Pembagian elemen Q1- D1 Q2-D2 3 kinematis 3 elemen a) Diagram Q-D b) 3 elemen H3-d3 H4- d4 H2 H5 d5 d2 d1-H1 H6-d6 c) Diagram Hd
Gambar 6.4 pembagian elemen.
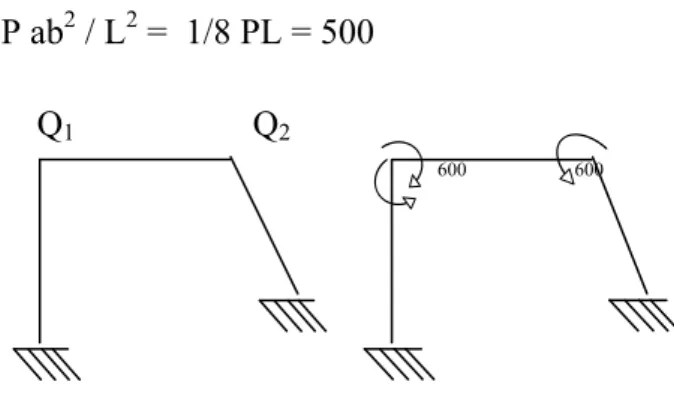
6.3.1.2 Beban Ekwivalen P ab2 / L2 = 1/8 PL = 500 Q1 Q2 600 600
Gambar 6.5 Beban ekwivalen 6.3.1.3 Pembentukan Matrik Kekakuan
Matrik Deformasi A dan Matrik Kekokohan S
D1 d3 d4 D2 D3
d2 d5
Gambar 6.6 Matrik Deformasi
Perhatikan untuk balok ataupun kolom miring tidak mengalami perubahan panjang hanya pergeseran. Garis tegak lurus tidak merubah panjang elemen. 6.3.1.4 Persamaan Linear [K] = [A]t [S][A] = {D} = [K]-1 {Q} = {H} = [S][A]{D} = {M}={H} – {FEM} =
VI - 5
6.3.2 LATIHAN
(1) Portal dengan Kaki Miring
P=1000 kg
C 400kg D given structure. 600kg 2EI 400kg 3m Draw the internal forces.
EI EI α
B 1m
A
1m 4m 4m
Gambar 6.7 soal latih
Q3- D3
Q2-D2 Q1- D1
3 kinematis 3 elemen
b) Diagram Q-D b) 3 elemen Gambar 6.8 Elemen dan Diagram Kinematis
H3-d3 H4- d4 H5 d5 H2 d2 H1-d1 H6-d6 Gambar 6.9 Diagram H-d
-100 500 333.33 400 500 500 500 500 666.66 500 833.33 600+400-666.66=333.33
Gambar 6.10 matrik gaya Q
[ ]
{ }
⎪ ⎭ ⎪ ⎬ ⎫ ⎪ ⎩ ⎪ ⎨ ⎧ − = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = 500 100 333.34 Q EI; 4/5 2/5 2/5 4/5 8/4 4/4 4/4 8/4 4/4 2/4 2/4 4/4 s D1 D2 d3 d4 D3 D1=1 d2 d5 d2 d5 d6 d1 d1 α 3 α 5 5/3 4/3 4 D1VI - 7
[ ]
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = 0 0 ? 1 0 ? 1 0 ? 0 1 ? 0 1 4 / 1 0 0 4 / 1 A [K] = [A]t [S][A] = EI/2 x x x x x x ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ [K] = EI ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − 8 , 2 1 3 6 , 625 , 077 , 1{ }
[ ]
{ }
EI Q K D 1 152 . 284 21 . 38 83 . 427 1 ⎪ ⎭ ⎪ ⎬ ⎫ ⎪ ⎩ ⎪ ⎨ ⎧ − = = − ; {H}=[S][A]{D}= ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ − = ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ 284.79 398.45 101.56 221.5 121.5 140.97 H6 H5 H4 H3 H2 H1 {M}={H} –{FEM} = ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ − = ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ + − − ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ 79 . 284 44 . 398 44 . 398 48 . 278 5 . 121 973 . 140 0 0 500 500 0 . 0 6 5 4 3 2 1 H H H H H HPerhatikan tanda positif dan negatif
4/3 4 4/3 4 5/3 5 5/3 5
400 278.5 398.44 121.53 284.79 140.97 400 kg 1000 kg 600 600 400 470 534.38 534.38 530 400 934.38 470 530 65.62 934.38 530 65.62 870
VI - 9 (2) Gable frame 10m 80 B C D 15m A 2 x 15m E Q2-D2 Q5-D5 Q1-D1 Q4-D4 Q3-D3 DIAGRAM Q-D KINEMATIS H4-d4 H5-d5 H6-d6 H3-d3 H7-d7 H2-d2 H8-d8 H1-d1 DIAGRAM H-d
Menentukan matrik Q Menentukan matrik A BCD ΣMD = 0 80 VB = 80*( 15+7.5)/30 = 60 VC = 80-60 = 20 20 30 BC ΣMC = 0 HB = ( 80*7.5 - 60*15 ) / 10 60 30 20 HB = 30 80 -30 -30 60 30 Perhitungan gaya Q 2α 1 α 1 2α 1 2α α 1
VI - 11 A = D1 D2 D3 D4 D5 d1 0 0 0 -0,0667 0 d2 1 0 0 -0,0667 0 d3 1 0 0 0,0500 -0,0500 d4 0 1 0 0,0500 -0,0500 d5 0 1 0 -0,0500 0,0500 d6 0 0 1 -0,0500 0,0500 d7 0 0 1 0,00 -0,0667 d8 0 0 0 0,00 -0,0667 S = 0,2667 0,1333 0,00 0,00 0,00 0,00 0,00 0,00 0,1333 0,2667 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,4444 0,2222 0,00 0,00 0,00 0,00 0,00 0,00 0,2222 0,4444 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,4444 0,2222 0,00 0,00 0,00 0,00 0,00 0,00 0,2222 0,4444 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,2667 0,1333 0,00 0,00 0,00 0,00 0,00 0,00 0,1333 0,2667 Q = 150 -150 0 -30 30 Kinv 2,06 -0,63 0,44 7,45 11,30 -0,63 1,44 -0,63 -4,69 -4,69 0,44 -0,63 2,06 11,30 7,45 7,45 -4,69 11,30 245,09 176,78 11,30 -4,69 7,45 176,78 245,09 K = 0,7111 0,2222 0,0000 0,0067 -0,0333 0,2222 0,8889 0,2222 0,0000 0,0000 0,0000 0,2222 0,7111 -0,0333 0,0067 0,0067 0,0000 -0,0333 0,0102 -0,0067 -0,0333 0,0000 0,0067 -0,0067 0,0102
SA*D FEM M akhir
D1 5,182E+02 H1 75,18 0 75,18 D2 -3,094E+02 H2 144,27 0 144,27 D3 4,430E+01 H3 5,73 -150 -144,27 D4 -2,281E+02 H4 -178,18 150 -28,18 D5 4,447E+03 H5 28,18 0 28,18 H6 106,77 0 106,77 H7 -106,77 0 -106,77 H8 -112,68 0 -112,68
80 80,00 40,00 9,00 61,25 -28,18 9,75 18,75 -144,27 11,50 -106,77 144,27 40,00 9,75 75,18 61,25 -112,68 14,63 -14,63 FREE BODY -28,18 Gambar Gaya Dalam :
Momen : -144,27 180 -106,77 -144,27 -106,77 -75,18 -112,68 Lintang :
VI - 13 6.3.3 Tugas 6.3.4 Evaluasi Beban (1) Beban (2) 0 C 10 0 2 2 D B 10 15 1 1 E A 15 15 { Q }1 0 187,5 0 -187,5 0 -112,5 112,5 10 10 187,5 -187,5 187,5 -187,5 112,5 -112,5 15 15 112,5 -112,5 150 150 187,5 -187,5 -112,5 112,5 { Q }2 0,00 -197,92 -83,33 0 0 150 25,00
10Hc+15Vc-q*(10/2)=0 10Hc-15Vc = 0 Hc = q*(10/2)/20 -83,33 -25 25 100 83,33 -75-150 -25,00 -75 150 25,00 -281,25 150 0 -75 75 100 10
-25 MENCARI MATRIK GAYA LUAR
-16,67 15 15 16,67 { Q } 7x1 A 1 0 0 0 0 -0,0667 0 0 1 0 0 0 -0,0667 0 0 1 0 0 0 0,0500 -0,0500 0 0 1 0 0 0,0500 -0,0500 0 0 1 0 0 -0,0500 0,0500 0 0 0 1 0 -0,0500 0,0500 0 0 0 1 0 0,00 -0,1000 0 0 0 0 1 0,00 -0,1000 S 0,2667 0,1333 0,00 0,00 0,00 0,00 0,00 0,00 0,1333 0,2667 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,4444 0,2222 0,00 0,00 0,00 0,00 0,00 0,00 0,2222 0,4444 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,4444 0,2222 0,00 0,00 0,00 0,00 0,00 0,00 0,2222 0,4444 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,4000 0,2000 0,00 0,00 0,00 0,00 0,00 0,00 0,2000 0,4000 K 0,267 0,133 0,000 0,000 0,000 0,027 0,000 0,133 0,711 0,222 0,000 0,000 0,007 0,033 0,000 0,222 0,889 0,222 0,000 0,000 0,000 0,000 0,000 0,222 0,844 0,200 0,033 0,027 0,000 0,000 0,000 0,200 0,400 0,000 0,060 0,027 0,007 0,000 0,033 0,000 0,010 0,007 0,000 0,033 0,000 0,027 0,060 0,007 0,019 K in 10,242 0,396 0,605 2,815 4,753 62,942 41,071 0,396 2,197 0,664 0,458 1,610 7,020 12,258 0,605 0,664 1,498 0,829 0,855 9,364 8,460 2,815 0,458 0,829 2,857 1,809 30,437 21,583 4,753 1,610 0,855 1,809 10,412 55,582 58,778 62,942 7,020 9,364 30,437 55,582 664,523 472,002 41,071 12,258 8,460 21,583 58,778 472,002 463,795
VI - 15
D(Q1) H=SAxD Mprimer M akh
-3062,65 0,00 0 0,00 915,45 530,41 0 530,41 132,60 -342,91 187,50 -530,41 -1445,87 -516,88 -187,50 -329,38 322,18 516,88 187,50 329,38 -26049,19 166,11 -187,50 353,61 -2671,71 -353,61 0 -353,61 0,00 0 0,00 Q3 - D3 Q4 - D4 Q7-D7 Q6-D6 Q2 - D2 Q1 - D1 Q5 - D5 KINEMATIS ( 7 ) 2α 1 α 1 2α 1 2α α 1
Beban (2) -329,38 329,38 -530,41 353,61 530,41 -353,61 -35,36088475 15 15 35,360885 57,32 45,53 23,57 23,57 75,00 75,00 155,89 144,11 35,36088475 300 -35,36088475 35,36 D(Q2) 10596,97 0,00 0 0,00 979,95 -1282,27 -281,25 -1001,02 -1609,63 1084,35 83,33 1001,02 5083,56 508,89 -83,33 592,22 9559,33 -592,22 0 -592,22 110869,47 895,15 0 895,15 80674,11 -895,15 0 -895,15
VI - 17 592,22 -592,22 100 10 1001,02 895,15 -1001,02 10,48 -895,15 250 66,73 -75 10 15 18,75 150 15 15 -89,52 -160,48 -250,00 OK ? 59,68 20,20 -281,25 79,87 79,87 -106,22 33,33 -6,99 -18,75 -79,87 dari M Primer -159,32 89,52 -89,52 100 -30,29 -10,48 30,29 -59,22 -10,48159,32 89,52 -75 10,48 148,84 150 -89,52 -75 -160,48 30,72 -30,72 57,83 -3,61 -27,11 -27,11 -40,67 -40,67 352,46 -352,46 10 515,02 406,65 -515,02 -406,65 10 150 15 -150,00 -40,67 -109,33 15 15 30,72 -30,72
6.4 Rangkuman
Secara garis besarnya , langkah2 metode ini adalah :
1. Memilih elemen-elemen dan menentukan kinematis struktur D 2. Buat Diagram Q-D dan H-d dan tentukan arah positip
3. Tentukan matrik A , S dan Q
Ingat bahwa deformasi arah aksial tidak ada. Gaya Q adalah Gaya Aksi bukan Reaksi 4. Perhitungan matrik [K] , [K]-1 dan {D} 5. Matrik gaya dalam [H} = [SA] {D}. 6. Gaya Dalam = {H} - M Primer
7. Gambar gaya dalam M, D, N. Ingat perjanjian tanda yang dipakai
6.5 Daftar Pustaka
1. Supartono F.X, dan Boen T ; Analisa Struktur dengan Metode Matrix, Fakultas Teknik universitas Indonesia, UI Press, 1984
2. Wang , C.K : “ Matrix methods of Structural Analysisa” Scrantons International Text Book Co., 1986
L I - 1
LAMPIRAN I. BEBERAPA ISTILAH
I. 1. Deformasi
Bila suatu struktur diberi beban, maka struktur tersebut (batang) akan mengalami
deformasi yaitu perubahan bentuk yang kecil, sehingga setiap titik2 pada struktur
akan berpindah ke posisi yang baru perpindahan akan terjadi pada umunya untuk struktur kecuali pada tumpuan yang tidak dapat bergerak. Perpindahan merupakan hal penting dalam analisa struktur.
Gambar L.1
Sebagai contoh diambil suatu potongan elemen dari batang stryktur rangka berbentuk lingkaran panjangnya dx
Gaya2 yang bekerja adalah NX = gaya axsial
Vy & Vz = gaya geser My & Mz = momen lentur T adalah forsi
Deformasi yang terjadi pada penampung dx adalah deformasi axial, geser lentur dan torsi seperti diperlihatkan pada gambar (2).
Adapun material bahan yang digunakan mengikuti Hukum Hooke yang elastis linier.
Perpindahan (displacement) suatu struktur ditimbulkan oleh gabungan pengaruh deformasi seluruh elemen. Dalam menentukan perpindahan suatu struktur
tidak semua jenis deformasi berpengaruh besar dan mungkin bias diabaikan.Pada balok deformasi lentur biasanya merupakan satu-satunyayang terpentuing dai pada deformasi axial yang biasanya diabaikan.
Untuk jenis struktur rangka batang, maka titik kumpul rangka dianggap sebagai sendi dan semua beban bekerja pada titik kumpul, sehingga analisanya hanya melibatkan deformasi axial batang. Jika terdapat beban di antara titik kumpul, maka beban ini dipindahkan pada titik kumpul seperti analisa balok ber tumpuan sederhana.
Pada portal bidang deformasi yangb berpengaruh adalah akibat lenturan dan gaya axial. Pada balok silang deformasi lentur selalu penting dan deformasi punter kadang kala turut diperhitungkan. Tergantung pada penampung yang digunakan, jika penampung tersebut adalah berdendeng tipis seperti balok I, maka batang akan sangat fleksibel terhadap punter dan tidak mengalami gaya punter yang besar.
Portal ruang merupakan jenis struktur rangka yang paling umum dlm geometrid an pembebanannya. Oleh karena itu deformasi axial, lentur dan punter mungkin seluruhnya perlu diperhitungkan tergantung jenis struktur dan bebannya. Untuk deformasi geser pada struktur rangka biasanya sangat kecil, sehingga jarang ditinjau dalam analisa.
I. 2. Aksi dan Perpindahan
Untuk menerangkan konsep dasar pada analisa struktur ada istilah yang akan digunakan seperti AKSI dan PERPINDAHAN. AKSI atau gaya dapat berupa gaya atau momen kopel ataupun gabungan keduanya. Selain Aksi luar pada struktur Aksi dalam juga perlu ditinjau sebagai contoh adalah resultan distribusi tegangan akibat momen lentur, gaya geser, gaya axial ataupun momen puntir.
Konsep dasar yang lain adalah perpindahan yang umunya berupa translasi atau rotasi di titik struktur. Transaksi menun jukkan adanya pergerakan, sedangkan rotasi menyatakan sudut perputaran antara garis singgung kurva elastis dengan posisi semula.
L I - 3
Dalam analisa struktur kita sering dijumpai aksi dan perpindahan yang paling sesuai dengan momen kopel ialah rotasi putaran sudut.
L/2 L/2 A1 A B D31 D11 D21 A2 A B D32 D12 D22 A B D33 D13 D23 gambar L.2 Contoh:
Notasi A dipakai untuk aksi gaya dan D untuk perpindahan.
Pada gambar L2 terdapat aksi A1, A2 dan A3
Perpindahan yang terjadi :
A1→ D1 (translasi) D11 D21 D31 A2→ D2 (translasi) D12 D22 D32 A3→ D3 (rotasi) D13 D23 D33 Perhatikan subscript yang dipakai
Perpindahan balok atas seluruh beban D1 = D11 + D12 + D13
D2 = D 21 + D22 + D23 D3 = D 31 + D32 + D33
Penjumlahan ini adalah prinsip superposisi yang dibahas lebih lanjut.
I. 3. Keseimbanan dan Kesesuaian
Tujuan analisa struktur di antaranya adalah menentukan berbagai aksi pada struktur seperti reaksi tumpuan dari resultan tegangan, momen lentur, geser dan sebagainya. Penyelesaian ini harus memenuhi syarat keseimbangan statis begitu juga pada bagian struktur yang dianalisa sebagai benda bebas free body.
Enam buah persamaan yang terdapat pada keseimbangan statis dalamnya dimensi adalah:
ΣFx = 0 ΣFy = 0 ΣFz = 0 vektor gaya
ΣMx = 0 ΣMy = 0 ΣMz = 0 momen terhadap sumbu x, y, z
Persamaan ini dapat dideduksi, apabila digunakan pada permasalahan struktur dalam 1 bidang. Dengan menganggap gaya terletak pada bidang x – y maka persamaan menjadi ΣFx = 0 ΣFy = 0 ΣMz = 0
Selain keseimbangan statis maka seluruh syarat kesesuaian harus terpenuhi dalam analisa struktur. Syarat ini juga disebut syarat geometris karena harus menyatakan kontinuitas perpindahan di seluruh bagian struktur.
Sebagai contoh adalah titik tumpuan jepit, harus dipenuhi kesesuaian perpindahan dengan kondisi tumpuan yaitu tidak terjadi tranlasi dan rotasi terhadap sumbu batang. Pada sambungan yang kaku antara dua batang maka perpindahan yang terjadi (tranlasi dan rotasi) harus sama bila ditinjau per batang secara terpisah.
I. 4. Ketidaktentuan Statis dan Kinematis
Ketidaktentuan suatu struktur tergantung pada yang ditinjau aksi atau perpindahan. Ketidaktentuan menunjukkan kelebihan aksi yang tidak diketahui terhadap jumlah persamaan keseimbangan statis.
Jika persamaan keseimbangan cukup untuk menentukan aksi maka struktur bersifat statis tertentu. Sebaliknya bila tidak dapat diselesaikan dengan persamaan keseimbangan maka struktur mempunyai sifat statis tak tentu.
Gambar L3
Ketidaktentuan statis berderajad 3 ada 6 reaksi yang harus dicari
L I - 5
Ketidaktentuan statis bisa dibedakan atas ketidaktentuan luar dan dalam. Bila berhubungan dengan reaksi struktur maka termasuk pada ketidaktentuan statis luar. Sebagai contoh adalah struktur ruang mempunyai 6 buah persamaan dan untuk struktur bidang mempunyai 3 buah persamaan. Apabila lebih di jumlah persamaan keseimbangan statis, maka disebut bersifat statis tak tentu luar.
Ketidaktentuan statis dalam berhubungan dengan perhitungan resultan tegangan dalam struktur dengan anggapan semua reaksi telah ditentukan sebelumnya.
Gambar L4
Ketidaktentuan statis luar adalah bersifat statis tertentu untuk ketidaktentuan statis dalam berdenyut-denyut karena 2j – m = 3 yaitu 2 x 6 – 11 = 1. Ada dua batang yang dipenggal artinya dengan melepas 2 gaya pada rangka batang, maka struktur menjadi statis tertentu.
Jenis ketidaktentuan yang lain adalah ketidaktentuan kenematis yaitu yang bertentangan dengan perpindahan titik kempul yang tidak diketahui. Pada struktur rangka titik kempul dapat berupa perteman dua batang atau lebih, titik tumpuan dan ujung bebas. Titik kumpul dapat mengalami transaksi atau rotasi.
A B Gambar L5
Titik A terjepit tidak mengalami perpindahan, sedangkan titik B memiliki 2 perpindahan ber rotasi dan bergeser.
Ketidaktentuan kenematis balok AB berderajat dua dan 2 perpindahan titik kempul ini harus dihitung dalam analisa balok. Apabila deformasi axial balok diabaikan, maka titik B hanya berrotasi, sehingga balok ini sebagai struktur dengan 1 derajat ketidaktentuan kenematis. D A E B F C Gambar L6
Rangka batang statis tak tentu berderajat 2 titik A, B, D dan E mempunyai dua derajat kebebasan masing-masing (translasi dalam 2 arah tegak lurus). Titik c dan f masing-masing adalah nol dan satu derajat kebebasan. Jadi rangka batang mempunyai 9 derajat kebebasan untuk translasi titik kempul dan ketidaktentuan kenematisnya berderajat 9.
Untuk menentukan ketidaktentuan statis dan kenematis, maka ada aturan yang dapat dipakai seperti.
I. Tentukan jumlah kelebihan gaya. Hitung jumlah pelepasan yang diperlukan agar struktur menjadi statis tertentu.
II. Tentukan jumlah derajat kebebasan titik kempul. Hitung jumlah pengembangan titik kempul yang diberikan agar struktur menjadi kenematis tertentu tidak ada perpindahan titik kempul.
L I - 7
I. 5 Stabilitas
Pada pembahasan derajat kebebasan terlihat bahwa, apabila jumlah reaksi melebihi jumlah persamaan, maka struktur bersifat statis taktentu luar. Dan jika jumlah ini sama, maka struktur statis tertentu luar. Hal ini berlaku, bahwa struktur tidak akan bergerak, apabila beban diberikan pada struktur tersebut.
Gambar L7
Pada contoh balok di atas 3 tumpuan roller terdapat 3 reaksi yang sama jumlahnya dengan persamaan keseimbangan statis untuk gaya perbidang.
Akan tetapi jelas bahwa balok akan bergerak ke kiri apabila beban dan yang mirin g diberikan. Jenis struktur ini dikatakan bersifat tidak stabil.
Gambar L8 Struktur pada gambar L8 dikatakan tidak stabil karena garis kerja gaya dan tidak melalui 3 gaya reaksi yang konkuren.
Jadi selain jumlah tumpuan struktur struktur yang cukup, maka tata letaknya harus menjamin agar struktur tidak tidak dapat bergerak.
I. 6. Superposisi
Pada suatu struktur akan terdapat besaran aksi gaya dan perpindahan yang tertentu. Aksi dan perpindahan ini menimbulkan aksi perpindahan lainnya pada struktur. Aksi perpindahan semula merupakan penyebab, sedangkan yang terakhir adalah pengaruh. Secara umum, nahwa pengaruh yang ditimbulkan oleh sejumlah penyebab dapat diperoleh dengan menggabungkan pengaruh setiap penyebabnya.
A2 Mb A1 Ra Rb A1 M’b R’a D’ R’b M”b R”a D” R”b Gambar L9
Dari prinsip superposisi bahwa akibat aksi dan perpibndahan A1 dan A2 dapat ditinjau secara terpisah.
RA = RA’ + RA” RB = RB + MB” MD = MB’ + MB” D = D’ + D”
Prinsip superposisi ini hanya berlaku, apabila hubungan antara aksi dan perpindahan pada struktur b ersifat linear. Hal ini terjadi apabila syarat-syarat b erikut terpenuhi: (struktur elstis linear).
1. Bahan struktur mengikuti hokum Hooke 2. Perpindahan struktur kecil (small deflection)
3. Tidak ada interaksi antara pengaruh axial dan lentur.
I. 7. Matrik Kekakuan
Hubungan antara aksi dan perpindahan berperan penting dalam analisa struktur dan digunakan dalam metode kekakuan. Untuk menyatakan hubungan aksi dan perpindahan ialah dengan persamaan aksi dan perpindahan.
L I - 9 Sebagai contoh: A D’ Gambar L10
Aksi A yang b ekerja pada balok me nimbulkan perpindahan D. Hubungan A dan D ini dapat dengan beban sebagai: A = S D
Di mana S adalah kekakuan yang didefinisikan sebagai aksi yang dikukuhkan untuk menimbulkan perpindahan satu unit. Satuannya adalah gaya persatuan panjang. Untuk keadaan yang lebih umum :
A1 A2 A3 a) b) D1 D2 D3 1 c) S31 S11 S21 d) 1 S12 S22 S32 e) S13 S23 S33 1 Gambar L11
a Dalam gambar diperlihatkan perpindahan balok yang selaras A1,A2 dan A3. Dari superposisi didapatkan :
D1 = D11 + D12 + D13
D11 : perpindahan yang selaras A1 diakibatkan oleh A1
D12 : perpindahan yang selaras A1 diakibatkan oleh A2
D13 : perpindahan yang selaras A1 diakibatkan oleh A3
Analog untuk D2 dan D3
D11 : perpindahan yang selaras A2 diakibatkan oleh A2 dst.
Persamaan aksi:
A1 : S11 D1 + S12 D2 + S13 D3 A2 : S2 D1 + S22 D2 + S23 D3 A3 : S31 D1 + S32 D2 + S23 D3
Di mana:
S adalah koefisien kekakuan yang menyatakan aksi akibat perpindahan satu satuan.
S11 : aksi yang selaras dengan A1 bila satu satuan perpindfahan D1 diberikan sementara perpindahan yang lain = 0 dan seterusnya.
Arah setiap koefisien kekakuan yang diperlihatkan dianggap positif, apabila searah dengan aksi yang selaras. Persamaan aksi untuk struktur dengan n buah aksi adalah:
A1 : S11 D1 + S12 D2 + S13 D3 A2 : S21 D1 + S22 D2 + S23 D3
- - -
An : Sn D1 + S31 D2 + S33 D3 Dalam balok matrik
[ ] [ ][ ]
A S D atau Dn D D Snn Sn Sn n S S S n S S S An A A = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ .. 2 1 .. 2 1 .. .. .. .. 2 .. 22 21 1 .. 12 11 .. 2 1Dimana A = Matrik aksi berukuran n x 1
D = Matrik perpindahan berukuran n x 1 S = Matrik kekakuan berukuran n x n
Koefisien kekakuan Sij didefibnisikan sebagai aksi ke – i akibat satu satuan perpindahan ke- j sementara petrpindahan lainnya adalah nol.
I. 8. Beban Ekivalent
Analisa struktur mengharuskan struktur hanya memikul beban yang bekerja pada titik kempul. Sebenarnya beban yang bekerja pada struktur tidak memenuhi syarat tersebut. Agar supaya syarat terpenuhi beban pada batang harus diganti dengan beban ekivalen pada titik kem pul. Beban ekivalen ini sedemikian rupa, sehingga
L I - 11
perpindahan struktur yang ditimbulkan sama dengan perpindahan akibat beban sebenarnya. Beban ekivalen dapat dihitung berdasarkan gaya jepit ujung.
W M1 P1 P2 L L/2 L/2 1/12 WL2 wL/2 P1 PL/8 PL/8 .5P1 .5P1 WL/2 WL/2+.5P1 .5P1+P2 1/12 WL2 M1+1/12WL2-PL/8 Gambar L12
Titik kempul dikekang terhadap semua perpindahan, sehingga menghasilkan 2 balok terjepit (gambar L12).
Di sini gaya ujung ditunjukkan sebagai reaksi pengekangan pada struktur terhekang. Jika reaksi pengekang ini dibalik arahnya akan menjadi beban yang ekivalen dengan beban yang bekerja pada batang.
Beban titik kempul ini digabungkan, sehingga dapat digunakan dalam analisa struktur.
I. 9. Teori Energi
Pembahasan konsep energi ini terbatas pada struktur yang regan gan dan perpindahannya kecil serta energinya tidak hilang selama proses pembebanan statis. Dengan kata kain, kerja luar (external) dari beban yang diberikan secara perlahan-lahan sama dengan energi yang disimpan dalam struktur.
Dari teori elastis, apabila ditinjau pada elemen yang sangat kecil akan terdapat beberapa tegangan seperti pada gambar 17.
σy τyx τyz τxy dx τzy σx τzx σz Gambar L13
Terdapat 3 tegangan normal (σx, σy, σz) dan 6 tegangan geser (τxy,τxz dst nya).
τxy = τyx (a.) τyz = τzy
τzx = τxz
Jadi hanya 6 komponen tegangan yang perlu ditin jau untuk pegangan berlaku. u,v,w adalah translasi dalam arah x,y,z. Єx = du/ dx
Єy = dv/ dy (b.) Єz = dw/ dz
Untuk regangan geser γxy = γyx = Əu/Əy + Əv/Əx
γyz = γzy = Əv/Əz + Əw/Əy (c.) γzx = γxz = Əw/Əx + Əu/Əz σ = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 6 5 4 3 2 1 σ σ σ σ σ σ = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ zx yx xy z y x σ σ σ σ σ σ ε = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 6 5 4 3 2 1 ε ε ε ε ε ε = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ zx yz xy z y x ε ε ε ε ε ε (d.)
Tegangan dan regangan pada sembarang titik untuk benda 3 dimensi
Dari diagram tegangan – regangan untuk bahan linear. Energi regangan didefinisikan sebagai integrasi kerja dalam dari tegangan selama pertambahan regangan untuk pegangan total dan seluruh volume.
U = 2 1
∑
= 5 1 . . n i dV i iσ ε = t dV V . . 2 / 1∫
σ εL I - 13
Dimana : σt transpose matirk kolom
ns jumlah komponen regangan ε
U Energi regangan
σi
dσ
dЄ Єi gambar L14
Energi regangan komplementer didefinisikan sebagai integrasi kerja dalam dari regangan pertambahan tegangan untuk tegangan total dan seluruh volume.
U* = 2 1
∑
= 5 1 . . n i dV i iσ ε = t dV V . . 2 / 1∫
ε σ Dimana : εt transpose matirk kolom εUntuk kerja beban dapat dirumuskan sama seperti energi regangan.
Pj dP dΔ Δj Gambar L15 W = 2 1 = Δ
∑
= 5 1 . . n j dV j Pj 1/2 At D W* = 2 1∑
Δ = = 5 1 . . n j dV j Pj 1/2 Dt ADari prinsip kekuatan energi, bahwa kerja beban W = energi pegangan U yang disimpan dalam struktur, sehingga:
Teori costigliano I menyatakan bahwa jika energi regangan benda elastis diunyatakan sebagai fungsi (himpunan) perpindahan, maka turunan parsial pertama fungsi ini terhadap perpindahan sama dengan gaya aksi yang selaras.
Dj U ∂ ∂ =
∑
− n k Sjk 1 Dk = Aj ( j = 1, 2, …..n )Persamaan ini menyatakan n (himpunan) syarat keseimbangan. Apab ila persamaan
ini diturunkan terhadap Dk , maka akan diperoleh suku kekakuan umum Sjk
sebagai: Dj U σ σ Dk Dj U ∂ ∗ ∂ ∂ = Dk Aj ∂ ∂ = Sjk j = 1, 2, ………… n k = 1, 2, …………. N
Hubungan timbal balik (teorema Maxwell), jika untuk differensial dibalik, maka hasilnya harus sama, sehingga: Sjk = Skj
Oleh karena itu semua pasangan kekakuan silang sama besar, sehingga matrik S adalah simetris atau identik transposenya. S = ST
1.10. Rangkuman
• Bandungkan jenis2 struktur rangka seperti Rangka Batang , Balok ataupun Portal. Perbedaan terletak pada gaya dalam dan deformasi • Dasar2 analisa struktur seperti deformasi, Aksi dan Perpindahan ,
derajat kebebasan , derajat ketidak tentuan statis atau kinematis , stabilitas, Superposisi , Kekakuan , beban ekivalent dan teori energi.
L II - 1
LAMPIRAN II PERINTAH UNTUK CALCULATOR CFX 9850GB Matrix calculations
26 matrix memories (Mat A Through Mat Z) plus a matrix answer memory (MatAns), make it possible to perform the following matrix operations.
y Addition, subtraction, multiplication y Scalar multiplication calculations y Determinant calculations
y Matrix transposition y Matrix inversion y Matrix squaring
y Raising a matrix to a specific power
y Absolute value, integer part extraction, fractional part extraction, maximum integer calculations
y Matrix modification using matrix commands
LII-1 before performing matrix calculations LII-2 matrix cell operations
LII-3 modifying matrices using matrix commands LII-4 matrix calculations
LII-1 Before Performing Matrix Calaulations
In the Main Menu, select the MAT icon to enter the Matrix Mode and display its initial screen.
{DEL}/{DEL.A} … deletes {a specific matrix}/{all matrices}
The maximum number of rows that can be specifies for a matrix is 255, and the maximum number of columns is 255.
About Matrix Answer Memory (MatAns)
The calculator automatically stores matrix Answer Memory. Note the following points about Matrix Answer Memory. Whenever you perform a matrix calculation, the current Matrix Answer Memory contents are replaced by the new result. The previous contents are deleted and cannot be recovered. Inputting values into a matrix does not affect Matrix Answer Memory contents.
Creating a Matrix
To create a matrix, you must first define its dimensions (size) in the MATRIX list. Then you can input values into the matrix to specify the dimensions of a matrix
L II - 3
Example : To create a 2-row x 3-column matrix in the area named Mat B
Highlight Mat B.
All of the cells of a new matrix contain the value 0.
All “Mem ERROR” remains next to the matrix area name after you input the dimensions, it means there is not enough free memory to create the matrix you want.
Displayed cell values show positive integers up to six digits, and negative integers up to tive digits (one digit used for the negative sign). Exponential values are shown with up to two digits for the exponent. Fractional values are not displayed.
You can see the entire value assigned to a cell by using the cursor keys to move the highlighting to the cell whose value you want to view.
The amount of memory required for a matrix is ten bytes per cell. This means that 3 x 3 matrix requires 90 bytes of memory ( 3 x 3 x 10 = 90 ).
Deleting Matrices
You can delete either a specific matrix or all matrices in memory. To delete a specific matrix
While the matrix list on the display, use and to highlight the matrix you want to delete.
Press {DEL}
Press {YES} to delete the matrix or {NO} to abort the operation without deleting anything.
The indicator “None” replaces the dimensions of the matrix you delete. To delete all matrices
While the matrix list is on the display, press {DEL A}.
Press {YES} to delete all matrices in memory or {NO} to abort the operation without deleting anything.
L II - 5
LII – 2 Matrix Cell Operations
Use the following procedure to prepare a matrix for a cell operations.
While the MATRIX list on the display, use to highlight the name of the matrix you want to use.
And the function menu with the following items appears. {R.OP} …{row calculation menu}
{ROW}/{COL} … {row}/{column} operation menu
Row Calculations
The following menu appears whenever you {R . OP} while a recalled matrix is on the display.
{Swap} … {Row Swap}
{xRw} … {Product of specific row and scalar}
{xRw+} … {Addition of one and the product of a specific row with a scalar}
{Rw+} … {Addition of specific row to another row}
To swap two rows
Example : To swap rows 2 and 3 of the following matrix :
To calculate the product of a row :
Example : to calculate the product of row 2 of the following matrix
and the scalar 4 :
To calculate the product of a row and add the result to another row
Example : to calculate the product of row 2 of the following matrix and the scalar 4, then add the result to row 3 :
L II - 7
To add two rows together
Example : to add row 2 to row 3 of the following matrix :
Row Operations
The following menu appears whenever you {ROW} while a recalled matrix is on the display.
{DEL} … {delete row} {INS} … {insert row} {ADD} … {add row}
To delete a row
To insert a row
Example : To Insert a new row between rows 1 and 2 of the following matrix
:
To add a row
Example : to add a new below row 3 of the following matrix :
Column Operations
The following menu appears whenever you (COL) while a recalled matrix is on the display.
{DEL} … {delete column} {INS} … {insert column} {ADD} … {add column}
To delete a column
L II - 9
To Insert A Column
Example : to insert a new column between column 1 and 2 of the following matrix :
To Add A Column
Example
:
to add a new column to the right of column 2 of the following matrix :LIII – 3
Modifying Matrices Using Matrix Commands
To Display The Matrix Commands
1. From the main menu, select the RUN icon and
The following describes only the matrix command menu items that are used for creating matrices and inputing matrix data.
{Mat} … {Mat command (matrix specification)}
{MÆL} … {MatÆList command (assign contents of selected column
to list file)}
{Aug} … {Augment command (link two matrices)} {Iden} … {identify command (identify matrix input)} {Dim} … {Dim command (dimension check)}
L II - 11
Matrix Data Input Format
The following showns the format you should use when inputing data to create a matrix using the matrix operation menu’s Mat command.
an error occurs if memory becomes full as you are inputing data.
You can also use the above format inside a program that inputs matrix data.
To Input An Identify Matrix
Use the matrix operation menu’s identify to create an identify matrix.
To Check The Dimensions Of A Matrix
Use the matrix operation menu’s Dim to check the dimensions of an existing matrix.
The display showns that matrix A consists of two rows and three columns. You can also use {Dim} to specify the dimensions of the matrix.
Modifying Matrices Using Matrix Commands
You can also use matrix commands to assign values to and recall values from an existing matrix, to fill in all cells of an existing matrix with the same value, to combine two matrices into a single matrix, and to assign the contents of a matrix column to a list file.