PERANCANGAN DAN REALISASI SISTEM KONTROL
PROSES MENGGUNAKAN DISTRIBUTED CONTROL
SYSTEM CENTUM CS 3000 MELALUI JARINGAN
Fatwa Cahyo Kusumo – 2206 100 137
Jurusan Teknik Elektro – FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Surabaya – 60111
E-mail: [email protected]
Abstrak - Aplikasi Distributed Control System Centum CS
3000 (DCS), lebih banyak digunakan sebagai kontroler pada sistem kontrol proses jarak jauh. Hal ini dikarenakan, adanya jarak yang cukup jauh antara plant dan kontroler. Adanya jarak yang sangat jauh ini, menyebabkan jalannya proses tidak berurutan. Oleh karena itu, sebelum merealisasikan sistem ini, diperlukan perancangan simulator kontrol proses terlebih dahulu.
Penelitian ini diawali dengan cara menerapkan arsitektur dari sistem kontrol proses. Kontroler PID dari DCS digunakan untuk mengontrol plant dari jarak jauh. Agar kontroler dan plant dapat berkomunikasi, diperlukan media berupa jaringan ethernet. Sinyal kontrol yang dikirimkan dari DCS akan diterima plant melalui modul masukan dan keluaran yang digunakan. Pada penelitian ini, digunakan pengujian terhadap virtual dan riil plant.
Hasil dari penelitian ini, terealisasi sebuah sistem kontrol proses dengan mengintegrasikan DCS dengan plant melalui jaringan Ethernet. Hasil analisa dari pengujian sistem ini,terdapat waktu tunda sebesar 4 detik untuk plant virtual dan 5 detik untuk plant riil Pada pengujian kestabilan, waktu kembali respon plant ke keadaan tunak pada penggunaan plant virtual sebesar 2 detik dan 4 detik pada penggunaan plant riil.
Kata Kunci: Sistem Kontrol Proses, DCS CENTUM 3000,
ADAM 5000 TCP/IP
I. PENDAHULUAN
Perkembangan teknologi di dunia saat ini, telah menghadirkan perubahan yang sangat signifikan pada peralatan instrumen. Distributed Control System (DCS), merupakan salah satu dari peralatan instrumen yang muncul dari perkembangan teknologi. Fungsi dari DCS sendiri adalah untuk mengontrol dan memonitor jalannya proses pada plant. Selain dapat melakukan dua fungsi tersebut, DCS dapat mengontrol plant dari jarak yang sangat jauh. Agar dapat mengontrol dan memonitor jalannya proses pada plant, sensor dan aktuator pada plant dihubungkan dengan DCS.[3] Awalnya minikomputer diaplikasikan untuk proses kontrol pada awal tahun 60-an. Sistem ini memusatkan semua pengontrolan dari lapangan keja sendiri. DCS dikenalkan pada tahun 1975 oleh Honeywell dengan
produk TDC 2000 dan Yokogawa dengan produk CENTUM. Di Amerika, Bristol mengenalkan UCS 3000 dan pada tahun 1980 dan Baley (bagian dari ABB) meluncurkan NETWORK 90. DCS berkembang setelah terbukti menaikkan kehandalan mikrokomputer dan mikroprosesor dalam dunia proses kontrol. DCS yang memakai kontrol fungsi blok dimulai oleh Foxboro dan memakai teknologi tinggi seperti Fondation Fielbus saat ini.
Komunikasi digital diantara kontroler dan Human
Machine Interface (HMI) adalah keunggulan utama DCS dan
dibuat dalam suatu sistem reudandency. DCS saat ini telah berkembang dan disempurnakan sistemnya mengikuti teknologi saat ini baik berupa jaringan dan sistem operasinya. Perkembangan berikutnya didukung oleh OLE
for Process Control (OPC) dan komunikasi lain seperti fieldbus, profibus membuat sistem DCS menjadi lebih
ringkas tetapi membutuhkan sistem operasi yang tinggi.[5] Pada makalah ini, akan membahas mengenai perancangan sistem kontrol proses dengan menggunakan DCS sebagai kontroler. Perancangan sistem dimulai dengan definisi kebutuhan sistem. Hal ini dilakukan untuk mencari komponen yang sesuai dengan kebutuhan sistem. Selain itu, diperlukan identifikasi untuk menentukan fungsi alih dari
plant. Setelah kebutuhan sistem terpenuhi, dilakukan
penggabungan antar komponen.
II. DCS CENTUM CS 3000 DAN SISTEM KONTROL PROSES
a. Distributed Control System Centum CS 3000 [6] Teknologi DCS menggunakan beberapa kontroler yang terpisah. Masing-masing kontroler bekerja untuk menangani beberapa loop pengendalian. Sistem ini dinamakan
Distributed control system (DCS), karena mekanisme
pengendalian dilakukan beberapa kontroler ( distributed ). Gambar 2.1 menunjukkan sistem pengendalian DCS.
Gambar 2.1. Sistem pengendalian DCS transmitter ADC kontroler DAC FCE komputer field instrument bus bus
Dari gambar tersebut, Field instrument akan mengirimkan sinyal ke unit kontroler. Kontroler selanjutnya mengolah sinyal tersebut sesuai setting yang ada. Output sinyal dikirim ke field instrumentt di plant. Selama proses kalkulasi dan pengendalian, kontroler yang ada akan selalu mengirim sinyal ke sistem komputer pada kontrol room. Dengan demikian proses pengendalian dapat diawasi secara terus menerus.
b. Perancangan Sistem Kontrol Proses
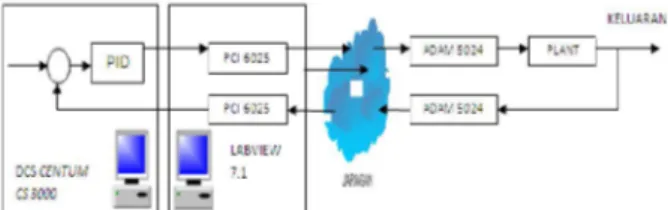
Perancangan sistem kontrol proses yaitu kontroler pada DCS Centum CS 3000 mengirimkan sinyal kontrol menuju plant dan umpan balik dari keluaran plant akan dikirimkan kembali ke DCS Centum CS 3000. Pada proses pengiriman sinyal kontrol, Kontroler terhubung ke plant melalui melalui jaringan. DCS Centum CS 3000 digunakan sebagai kontroler dan pusat dari perhitungan untuk mengirimkan sinyal kontrol, sehingga mempertahankan keluaran plant sesuai dengan set point. Sinyal kontrol dari kontroler akan dikirimkan melalui sistem tambahan (Embeded system), yaitu penggunaan Labview sebagai pertukaran data. Hal ini disebabkan, tidak tersedianya modul komunikais modbus ethernet pada DCS Centum CS 3000. Gambar 2.2 menunjukkan diagram blok sistem kontrol proses ini.
Gambar 2.2. Diagram blok sistem kontrol proses
III. PERANCANGAN SISTEM
Untuk merealisasikan sistem kontrol proses secara menyeluruh, diperlukan suatu bentuk konfigurasi yang mampu mencakup dan menunjukkan jalannya suatu proses serta diagram jaringan secara keseluruhan. Bentuk konfigurasi dari sistem yang dibangun ditunjukkan dalam Gambar 3.1.
Gambar 3.1. Konfigurasi sistem kontrol proses
Sebelum perancangan sistem dilakukan, maka perlu menentukan perangkat keras dan lunak apa saja yang di butuhkan dalam sistem. Adapun perangkat keras dan perangkat lunak yang akan di butuhkan pada perancangan sistem.
a. HUB/Switch
HUB merupakan Alat penghubung antar komputer, semua jenis komunikasi hanya dilewatkan oleh hub. Hub hanya untuk menyambungkan beberapa komputer di satu
group IP lokal. HUB dan switch mempunyai kecepatan
transfer data sampai dengan 100 Mbps bahkan switch sudah dikembangkan sampai kecepatan 1 Gbps. Pada penelitian ini, HUB digunakan untuk menghubungkan PC Human Interface
Station dengan perangkat keras Advantech ADAM 5000 TCP
b. Komputer Human Interface Station (HIS)
Komputer Human Interface Station merupakan komputer pusat yang memiliki fungsi sebagai kontroler dan kalkulasi nilai. Komputer Human Machine Interface merupakan bagian dari Distributed Control System Centum
3000. Pada penelitian ini, Komputer Human Interface Station
yang digunakan adalah Komputer dengan spesifikasi : Prosessor : Intel(R) Pentium (4) 4 CPU 3.00 GHz Memori : 224Mb RAM
Operating system : Microsoft Windows XP Professional Perangkat lunak : Centum CS 3000
c. Komputer Labview
Komputer Labview memiliki fungsi sebagai penghubung antara Centum CS 3000 dengan perangkat keras Advantech
ADAM 5000 TCP. Dari komputer ini, digunakan untuk
pengiriman dan penerimaan data. Pada pengerjaan Tugas Akhir ini, komputer yang digunakan adalah komputer dengan spesifikasi :
Prosessor : Intel(R) Core(TM) 2 duo CPU E7300 2.66 GHz
Memori : 988 Mb RAM
Operating system : Microsoft Windows XP Professional Perangkat lunak : Labview 7.1
d. Advantech ADAM 5000 TCP
Perangkat keras ADAM 5000 TCP pada Tugas Akhir ini, digunakan sebagai I/O untuk menjalankan proses. Hal ini dikarenakan, perangkat keras ADAM 5000 TCP bekerja setelah diberikan masukan dari komputer Labview. Nilai yang dibaca pada Perangkat keras ADAM 5000 TCP adalah nilai desimal. Untuk menjalankan alat ini, perintah dikirim melalui jaringan ethernet dengan komunikasi modbus.
e. PCI E6025 Series
Penggunaan PCI ini, lebih banyak untuk menghubungkan I/O pada DCS dengan Labview. PCI dianggap memenuhi syarat, karena memiliki julah modul I/O yang sesuai untuk menjalankan plant. Spesifikasi dari kedua PCI secara lengkap ditunjukkan pada Tabel 2.1
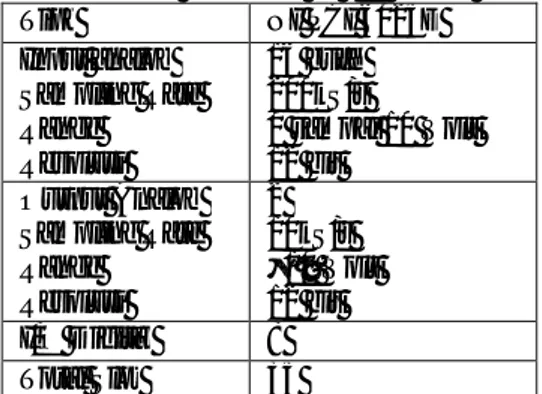
Tabel 2.1 Spesifikasi NI PCI Eseries
Tipe NI PCI 6025E Input analog Sampling Rate Range Resolusi 16 buah 200kS/s 0 sampai 10 Volt 12 bit Output Analog Sampling Rate Range Resolusi 2 10kS/s ±10 Volt 12 bit I/O Digital 8 Total Slot 35 f. Plant
Dalam penelitian ini, menggunakan plant pressure process
rig 38-714. Plant ini digunakan untuk mendapatkan data dari
simulator kontrol proses yang telah dibangun. plant pressure
process rig 38-714 dipilih karena dianggap sebagai salah satu
bentuk proses yang terdapat di industri nyata. Pada plant ini, nantinya akan dikontrol bukaan dari control valve.
1. Koneksi DCS Centum CS 3000 dengan Labview Perancangan sistem dimulai dengan menggabungkan DCS Centum CS 3000 dengan komputer Labview. Penggabungan kedua komponen tersebut dilakukan dengan menggunakan kabel. Agar nilai keluaran analog dapat dibaca pada Labview, diperlukan tambahan komponen berupa PCI NI E6025 series. PCI ini, sangat support dengan perangkat lunak Labview. Selain itu, PCI ini merupakan sebuah AD/DA, karena data analog yang diterima oleh PCI akan dikonversi menjadi data digital, sehingga dapat terbaca pada Labview, begitu pila sebaliknya. Setelah DCS Centum CS
3000 terkoneksi dengan Labview, selanjutnya membuat
program untuk mengirimkan data dari Labview ke ADAM
5000 TCP.
2. Koneksi Labview dengan ADAM 5000 TCP
Koneksi Labview ke ADAM 5000 TCP membutuhkan tambahan perangkat lunak OLE for process control. Langkah pertama dalam koneksi ini, membuat program konversi untuk nilai masukan dan keluaran ADAM 5000 TCP. Hal ini di perlukan, karena pada ADAM 5000 TCP nilai yang terbaca merupakan nilai desimal (DEC). Agar nilai desimal yang terbaca pada modul ADAM 5000 TCP, diperlukan pengujian untuk mengetahui berapa nilai desimal yang di perlukan untuk mengeluarkan tegangan dari modul analog pada
ADAM 5000 TCP. Setelah menentukan besarnya nilai
desimal untuk modul masukan dan keluaran analog dari
ADAM 5000 TCP, dibuat program konversi dari Labview
seperti yang ditunjukkan pada Gambar 3.2.
Setelah program konversi telah di buat, berikutnya mengoneksikan Labview dengan ADAM 5000 TCP. Pada koneksi ini membutuhkan bantuan perangkat lunak OPC. OPC yang digunakan merupakan OPC KEPServer. OPC ini dipilih, karena memiliki pilihan komunikasi modbus
ethernet. Komunikasi tersebut dipilih, karena untuk
mengirimkan data dari Labview ke ADAM 5000 TCP menlalui jaringan ethernet. Pada OPC ini, dibuat tagname untuk menghubungkan nilai keluaran dan masukan pada Labview dengan channel pada modul keluaran dan masukan analog dari ADAM 5000 TCP.
Setelah pembuatan tagname selesai, langkah yang dilakukan adalah menghubungkan Labview dengan OPC tersebut. Hal ini dilakukan, karena nilai yang dibaca pada
ADAM 5000 TCP juga terbaca pada OPC KEPServer.
Gambar 3.2. Program konversi pada Labview
Pada Labview terdapat pilihan datasocket connection, fungsi ini bertujuan untuk menghubungkan nilai yang terbaca pada Labview dengan tagname pada OPC. Nilai yang terbaca pada Labview, nentinya akan terbaca pula pada ADAM 5000
TCP. Gambar 3.3 menunjukkan tampilan datasocket connection untuk menggabungkan Labview dengan OPC.
Gambar 3.3. tampilan datasocket connection pada Labview
3. Koneksi ADAM 5000 TCP dengan plant
Agar dapat mengontrol plant dengan menggunakan
ADAM 5000 TCP, diperlukan sebuah konverter untuk
merubah tegangan dari modul keluaran analog ADAM 5000
TCP menjadi arus. Hal ini dikarenakan, untuk menjalankan plant membutuhkan masukan berupa arus. Process Control Adapter (PCA), merupakan suatu konverter yang digunakan
untuk merubah tegangan menjadi arus dan sebaliknya.
4. Identifikasi Plant
Identifikasi dilakukan dengan menggunakan dua buah komputer dan plant. Kedua komputer terhubung melalui jaringan ethernet, salah satu komputer terhubung dengan
plant sebagai alat akuisisi data dari dan menuju plant. Selain
itu, komputer yang terintegrasi dengan plant juga berfungsi sebagai alat komunkasi antara kontroler dengan plant. Sinyal uji dikirimkan dari satu komputer ke komputer yang
terhubung dengan plant, dan respon plant dikirimkan kembali ke komputer kontroler. Gambar 3.4 menunjukkan grafik respon hasil identifikasi plant setelah diberikan masukan sinyal unit step sebesar 2 Volt.
Gambar 3.4. Respon plant terhadap masukan sinyal step
Dari gambar tersebut, di peroleh nilai fungsi alih plant:
1 5 . 49 096 . 1 ) ( + = s s G 5. Perancangan Kontroler
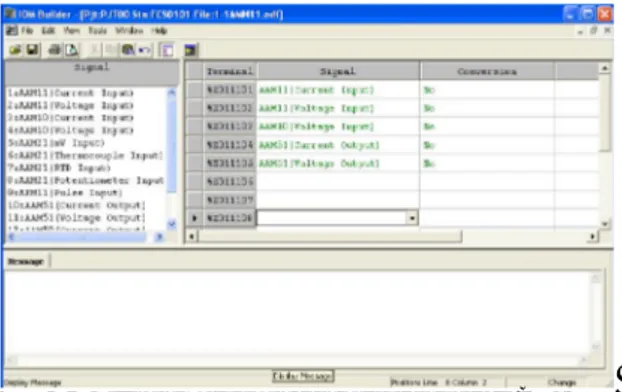
Kontroler yang digunakan pada penelitian ini, dibuat pada perangkat lunak Centum CS 3000 yang terdapat pada komputer HIS. Kontroler yang di gunakan merupakan kontroler PID. Kontroler PID di pilih, karena memiliki kemampuan untuk memperbaiki dan mempertahankan keluaran dari plant. Sebelum merancang kontroler, terlebih dahulu menentukan masukkan dan keluaran dari kontroler. Hal ini bertujuan untuk menyesuaikan satuan yang digunakan dari sistem Gambar 3.5 menunjukkan penentuan masukan dan keluaran untuk kontroler PID pada Centum CS
3000.
Gambar 3.5. Pilihan masukkan dan keluaran pada DCS Centum CS 3000
Dari gambar tersebut, di pilih masukkan dan keluaran yang cocok untuk menjalankan sistem. Setelah menentukan masukkan dan keluaran untuk kontroler, dilakukan
perancangan kontroler PID. Pada Centum CS 3000, Grafik
Control Builder (GCB) merupakan suatu tool yang
digunakan untuk perancangan. Pada GCB, masukkan dan keluaran yang telah di pilih, dihubungkan dengan blok kontroler PID. Gambar 3.6 menunjukkan hasil perancangan kontroler PID.
Gambar 3.6. Program kontroler PID pada Centum CS 3000
IV. PENGUJIAN SISTEM
Pengujian sistem dilakukan sebagai sarana untuk mengetahui seberapa layak sistem tersebut jika diterapkan pada kontrol proses yang sebenarnya. Pengujian ini dilakukan dengan menggunakan dua plant, virtual dan riil. Hasil dari dua plant tersebut kemudian dibandingkan dan di tentukan kelayakannya.
a. Pengujian Plant Tanpa Disturbance 1. Pengujian dengan Plant Riil
Pengujian waktu tunda dengan menggunakan plant riil, dilakukan dengan memberikan setpoint sebesar 30% pada komputer HIS atau 3 Volt untuk Labview. Parameter kontroler PID pada percobaan ini, di tunning dengan memberikan gain propsional sebesar 92%, gain integrator sebesar 15% dan gain derivartif sebesar 2.3%. dari Grafik respon kontroler, terlihat bergerak turun, hal ini dikarenakan ketika diberikan masukan sebesar 5 Volt, keadaan control valve tertutup penuh. Hasil respon plant ditunjukkan oleh Gambar 4.1.
Hasil respon plant dengan menggunakan plant riil, berada pada nilai 29.7% saat keadaan tunak. Dari percobaan ini, terdapat waktu tunda sebesar 5 detik, sebelum respon menuju keadaan tunak. Pada pecobaan ini terdapat kesalahan sebesar 0.1% .
2. Pengujian dengan Plant Virtual
Pengujian waktu tunda dengan menggunakan plant
virtual, dilakukan dengan memberikan setpoint sebesar 25%
pada komputer HIS atau 2.5 Volt untuk Labview. Parameter kontroler PID pada percobaan ini, di tunning dengan memberikan gain propsional sebesar 32%, gain integrator sebesar 15% dan gain derivartif sebesar 1.3%. Hasil respon
plant ditunjukan pada Gambar 4.2.
Gambar 4.2. Hasil respon plant virtual dengan masukan 25%
Hasil respon plant dengan menggunakan plant virtual, berada pada nilai 23.9% saat keadaan tunak. Dari percobaan ini, terdapat waktu tunda sebesar 4 detik, sebelum respon menuju keadaan tunak. Pada pecobaan ini terdapat kesalahan sebesar 4.4% .
3. Hasil Perbandingan Respon Plant Tanpa Disturbance Dari pengujian yang telah dilakukan, hasil tersebut dibandingkan sebelum ditarik sebuah kesimpulan. Hasil perbandingan untuk pengujian waktu tunda dapat dilihat pada Tabel 4.1.
Tabel 4.1. Perbandingan hasil pengujian waktu tunda
Plant Τr (detik) Τs5% (detik) Error(%) waktu tunda (detik) Virtual 15.1 45.3 4.4 4 riil 18.77 56.31 0.1 5
Dari tabel tersebut, terlihat bahwa selisih waktu tunda antara pengujian dengan menggunakan plant virtual dan
plant riil adalah sebesar 1 detik. Hal ini menunjukkan adanya
kecepatan eksekusi data pada plant virtual atau riil.
b. Pengujian Plant dengan Disturbance 1. Pengujian dengan Plant riil
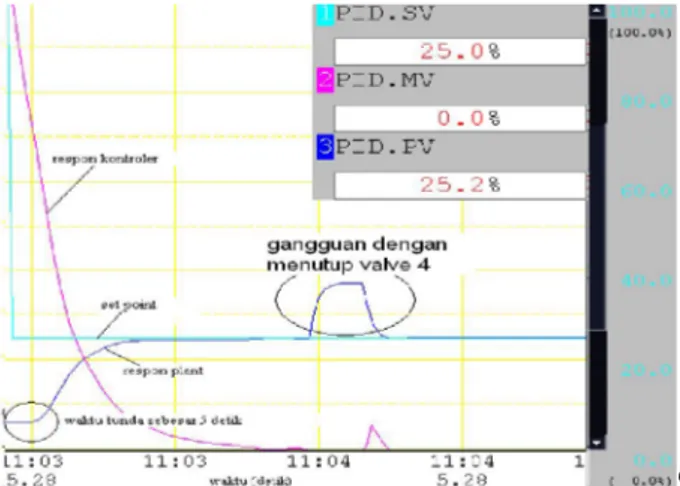
Pengujian kestabilan yang dilakukan dengan menggunakan plant riil, merupakan gangguan dengan menutup pebuh katup 4 dari plant. Pada pengujian ini, grafik respon kontroler PID tidak berbanding terbalik dengan pengujian menggunakan plant riil. Kontroler di tunning secara manual dengan diberikan gain proposional sebesar 92 %, gain integrator sebesar 15% dan gain derivartif sebesar 2.3%. plant virtual dijalankan dengan memberikan setpoint sebesar 25%. Grafik respon plant virtual berada pada nilai 25.2% pada saat keadaan tunak. Gangguan deberikan paa saat keadaan tunak selama 7 detik dan kemudian ganguan dihilangkan.
Gambar 4.3. Hasil respon plant riil untuk pengujian kestabilan
Dari gambar tersebut, didpatkan respon plant kembali menuju ke keadaan tunak selama 4 detik. Selain itu terdapat kesalahan sebesar 0.8%.
2. Pengujian dengan Plant virtual
Pengujian yang dilakukan dengan menggunakan plant
virtual, menggunakan gangguan berupa sinyal noise. Plant virtual dibuat ddengan menggunakan fungsi alih plant yang
didaptkan dari identifikasi. Pembuatan plant virtual menggunakan perangkat lunak Labview 7.1. Pada pengujian ini, grafik respon kontroler PID tidak berbanding terbalik dengan pengujian menggunakan plant riil. Kontroler di
tunning secara manual dengan diberikan gain proposional
sebesar 7 %, gain integrator sebesar 1.4% dan gain derivartif sebesar 0.5%. plant virtual dijalankan dengan memberikan
setpoint sebesar 40%. Grafik respon plant virtual berada
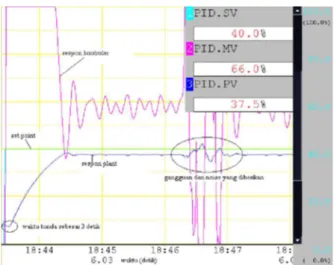
pada nilai 37.5% pada saat keadaan tunak. Gangguan diberikan pada saat keadaan tunak selama 6 detik dan ganguan dihilangkan. Hasil respon plant virtual dapat dilihat pada Gambar 4.4.
Gambar 4.4. Hasil respon plant virtual untuk pengujian kestabilan
Dari grafik respon plant virtual tersebut, respon kembali dengan cepat. Waktu kembali respon ke keadaan tunak sebesar 2 detik. Selain itu terdapat kesalahan sebesar 6.25%. 3. Hasil Perbandingan Respon Plant dengan
Disturbance
Dari hasil pengujian, besarnya kesalahan dapat terlihat ketika menggunakan plant virtual. Hal ini disebabkan kontroler PID berosilasi meskipun terus di tunning. Hasil pengujian kestabilan pada plant virtual atau riil di tunjukkan pada Tabel 4.2.
Tabel 4.2. Perbadingan hasil pengujian plant dengan disturbance
Plant Τr (detik) Τs5% (detik) Error(%) Waktu kembali (detik) Virtual 23.7 71.1 6.25 2 riil 15.92 47.76 0.8 4
Dari tabel pengujian tersebut, hasil waktu kembali dari respon plant virtual lebih cepat daripada respon plant riil. Hal ini disebabkan ketika diberi gangguan, respon kontroler pada plant virtual berosilasi, sehingga mempengaruhi respon
plant.
V. KESIMPULAN
Dari beberapa percobaan yang dilakukan dapat disimpulkan bahwa dalam proses mengirimkan data dari DCS Centum 3000 menuju plant pressure process rig 38-714 menggunakan dua perangkat lunak OPC KEPServer. Selain itu, jaringan komunikasi untuk pengiriman data dan penerimaan data melalui jaringan menggunakan protokol TCP. Pada percobaan dengan menggunakan plant tanpa
disturbance, waktu tunda terbesar terdapat pada penggunaan plant riil sebesar 5 detik. Pada percobaan ini, kesalahan
waktu tunak terbesar terdapat pada plant virtual sebesar 4.4%. Pada percobaan dengan menggunakan plant dengan
disturbance, waktu tunda terbesar terdapat pada penggunaan plant riil sebesar 5 detik. Pada percobaan ini, kesalahan
waktu tunak terbesar terdapat pada plant virtual sebesar 6.25%. Ketika plant virtual atau riil diberikan gangguan dan gangguan tesebut dihilangkan, waktu kembali respon plant ke keadaan tunak tercepat pada plant virtual, yaitu 2 detik. Kesalahan waktu tunda terbesar terdapat pada penggunaan
plant virtual, yaitu 6.25%.
DAFTAR PUSTAKA
[1] Yang, Shuang H, “Development of a distributed
simulator for control experiments through the internet”, computer science departement, Loughborough
University, 2001.
[2] Doug Cooper,Denielle Dougheryty “Control Station : An
Interactive Simulator For Process Control Iducation”, IEEE Transactions and Education, Vol.51, No.1,
Agustus 1999
[3] Srivastava,Abhinav,” Distributed Real-Time Control via
the Internet “,Thesis, Texas A&M University,2003.
[4] Yang,S.H,Chen,Alty,” Design and Implementation of
Internet-Based Process Control systems”, Department
of Computer Science, Loughborough University, LE11 3TU Loughborough, Leicestershire, UK,2001.
[5] Nobuaki,Konishi, ”System architecture of centum CS
3000” ,Yokogawa Technical Report,Jepang,1998
[6] Tim pengembang DCS,” Modul Pelatihan DCS ”,Teknik Sistem Pengaturan,Institut Teknologi Sepuluh Nopember,Surabaya,2009.
[7] Babak Azimi-Sadjadi. “Stability of Networked Control Systems in the Presence of Packet Losses”. CDC. 2003. [8] Tipsuwan, Y., Chow, Mo-Yuen, 2003. “Control
Methodologies in networked control systems”. Advanced Diagnosis and Control Lab, Department of Electrical and Computer Engineering, North Carolina State University, Daniels Hall, Raleigh, Februari. [9] Ogata, Katsuhito, 1998.” Teknik Kontrol Automatik”,
Jakarta.
[10] Samarayanake, Lilantha,2007,” Implementation of Distributed Control Systems for Industrial
Applications”, PSLIIT; VOL. 1.
RIWAYAT PENULIS
Fatwa Cahyo Kusumo, lahir pada 15 Oktober 1988 di Bontang. Setelah lulus dari SMA Yayasan Pupuk KalTim pada tahun 2006 penulis melanjutkan studi di S1 Teknik Elektro, Bidang Studi Teknik Sistem Pengaturan – Institut Teknologi Sepuluh Nopember Surabaya. Pada bulan Juni 2010, penulis mengikuti seminar dan ujian Tugas Akhir di bidang studi Teknik Sistem Pengaturan, Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember Surabaya sebagai salah satu persyaratan untuk memperoleh gelar Sarjana Teknik Elektro.