PENELITIAN DAN PENGELOLAAN PERANGKAT NUKLIR Pusat Teknologi Akselerator dan Proses Bahan
Yogyakarta, 18 Agustus 1008
FENOMENA
BOUNCING
PADA PROGRAMMABLE
LOGIC
CONTROLLER
(PLC) UNTUK MENGENDALIKAN
GERAKAN
MOTOR STEPPER 5 PHASE
Ari Satrnoko, Edy Surnamo, Paidjo
Pusat Tekn%gi Reaktor dan Kese/amatan NuklirABSTRAK
FENOMENA BOUNCING PADA PROGRAMMABLE LOGIC CONTROLLER (PLC) UNTUK MENGENDALIKAN GERAKAN MOTOR STEPPER
5
PHASE. Bidang Operasi Fasilitas PTRKN mengelola instalasi Untai Uji BETA (UUB) untuk mempelajari berbagai fenomena termohidrolika. Salah satu komponen utamanya adalah bagian uji QUEEN-I yang dilengkapi dengan pemanas berdaya total sekitar 4 kWatt. Dalam melakukan kegiatan eksperimen, proses pemanasan bagian uji dilakukan secara bertahap melalui pengaturan daya dengan memutar regulator tegangan trafo secara manual. Dalam rangka mengefisienkan kegiatan eksperimen, pengembangan dilakukan untuk mengganti proses pemutaran regulator trafo secara manual menjadi otomatis. Pengembangan ini dilakukan dengan cara memasang sebuah motor stepper bertipe5
phase yang dikendalikan o/eh PLC. Berbagai permasalahan timbul selama proses pengembangan ini. Salah satunya adalah efek bouncing yang temyata berasal dari signal keluaran PLC. Untuk memecahan masalah ini, maka dipasanglah sebuah komponen kapasitor pada lokasi tersebut. Sesuai dengan karakternya, kapasitor ini menyimpan aros ketika sedang dialiri Iistrik dan sebaliknya melepaskan aros ketika aliran Iistrik dihentikan. Akibatnya, getaran / osilasi tegangan sesaat menjadi lenyap. Dan terblikti, gerakan motor stepper menempuh jarak putar seperti yang dikehendaki.Kata Kunci: instalasi BETA, motor stepper, PLC, bouncing
ABSTRACT
The Operating Facilities Division - PTRKN manages the BETA installation designated for thermal-hydraulics research. One of its major components is QUEEN-I test section equipped by
a
heater with the capacity of 4 KVA. Before performing experiment, the test section is heated gradually by controlling the power by tuming manually the voltage regulator transformator. In order to make efficient,a
development is performed to replace from manual to automatic process. This is done by installinga
5
phases stepper motor controlled bya
PLC. Some problems rise during the development. One is bouncing phenomenon coming from the PLC output. To resolve this problem,a
capacitor is installed on the location. As its character, the capacitor save the current when loaded and release the current after that. Therefore, the instant voltage oscil/ation disappears. It is then proved that the stepper motor moves at
a
certain rotation as hoped.Key words: BETA installation, stepper motor, PLC, bouncing.
PENDAHULUAN
B
idanginstalasiOpel asiUntai FasilitasUji BETAPTRKN(UUB)mengelolauntukmempelajari berbagai fenomena termohidraulika.
Salah satu komponen utamanya adalah bagian uji
QUEEN-I yang dilengkapi dengan pemanas
berdaya total sekitar 4 kWatt. Dalam melakukan
kegiatan eksperimen, proses pemanasan bagian uji
dilakukan secara bertahap melalui pengaturan daya
dengan memutar regulator tegangan trafo secara
merata dan stabil. Kerja yang dilakukan untuk menaikkan daya adalah dengan memutar tombol regulator secara manual sebesar sudut tertentu. Besarnya sudut ini sebanding dengan output daya regulator untuk pemanas. Tahapan ini dilakukan secara berulang hingga batang panas pada bagian uji QUEEN-I mencapai temperatur seperti yang diinginkan.
tu.!c
f'.~tcc
cb:- ••
berbasis mikroprosesor integral. PLC menerima masukan dan menghasilkan keluaran sinyal-sinyal listrik untuk mengendalikan suatu sistem. Dengan demikian besaran-besaran fisika dan kimia yang dikendalikan, sebelum diolah oleh PLC, akan diubah menjadi sinyal listrik baik analog maupun digital, yang merupakan data dasamya. Karakter proses yang dikendalikan oleh PLC sendiri merupakan proses yang sifatnya bertahap, yakni proses itu betjalan urut untuk mencapai kondisi akhir yang diharapkan.
PLC berisi rangkaian elektronika digital yang berfungsi sebagai contact Normally Open (NO) dan contact Normally Close (NC) relay. Satu nomor kontak NO dan NC pada PLC dapat digunakan berkali-kali untuk semua jenis instruksi dasar PLC kecuali instruksi output. Instruksi output sebuah PLC tidak dapat dilakukan untuk nomor kontak yang sarna.
MOTOR STEPPER 5 PHASE
Motor stepper 5 phase terdiri dari 2 komponen utama: rotor dan stator (lihat Gambar 2). Rotor (bagian yang berputar) terdiri dari 3 komponen yaitu rotor cup I, rotor cup 2 dan magnet permanen. Rotor tersebut bersifat magnet dalam arah aksial sehingga jika rotor cup I berkutub utara maka rotor cup 2 berkutub selatan. Stator memiliki 10 kutub magnetik dengan gigi-gigi halus dan masing-masing kutub dilengkapi dengan kumparan. Sepasang kutub membentuk sebuah phase sehingga total terdapat 5 phase. Pada setiap rotor terdapat 50 gigi dan disusun sedemikian rupa sehingga rotor cup I dan rotor cup 2 membentuk offset jarak setengah pitch gigi.
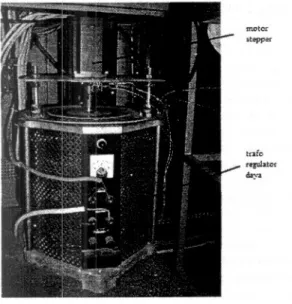
Gambar 1. Pengontrolan trafo regulator dengan daya 4 kW menggunakan motor stepper
Agar kegiatan eksperimen menggunakan instalasi BETA dapat lebih efisien, berbagai pengembangan dilakukan pacta instalasi tersebut. Salah satunya adalah dengan mengganti proses pemutaran regulator trafo secara manual menjadi otomatis. Pengembangan ini dilakukan dengan cara memasang sebuah motor stepper pada tombol regulator daya (Iihat Gambar I). Gerakan motor stepper ini dikendalikan oleh sebuah Programmable Logic Controller (PLC). Pemrograman dibuat sehingga setiap waktu tertentu motor stepper memutar regulator trafo untuk menaikkan daya secara otomatis. Motor stepper yang digunakan bertipe 5 phase. Makalah ini membahas berbagai permasalahan yang timbul selama proses pengembangan menggunakan motor stepper ini.
TEORI 8ill1BC3rin{J Rotol Cup1
I '
P~nT'laneotMaQnBl /1 " Roto; CUP 2Programmable Logic Controller (PLC) PLC merupakan sistem yang dapat memanipulasi, mengeksekusi, dan atau memonitor keadaan proses pada laju yang amat cepat, dengan dasar data yang bisa diprogram dalam sistem
Gambar 2. Komponen motor stepper
Prinsip kerja motor stepper 5 phase ditunjukkan oleh Gambar 3. Ketika misalnya phase A diaktifkan, kutub-kutub akan terpolarisasi sehingga menimbulkan gaya tarik pada kutub
PENELITIAN DAN PENGELOLAAN PERANGKA T NUKLIR Pusat Teknologi Akselerator don Proses Bahan
Yogyakarta, 28 Agustus 2008
lawannya pada rotor cup I. Pada saat yang bersamaan, kutub stator lainnya menimbulkan daya dorong / tolak terhadap rotor cup 2. Kondisi ini menyebabkan gaya-gaya yang bekerja pada rotor menjadi berimbang dan rotor berada pada keadaan stationGlY. Karena phase B, C, D dan E dinonaktitkan, phase B membentuk offset terhadap rotor cup 2 sebesar 0,72°.
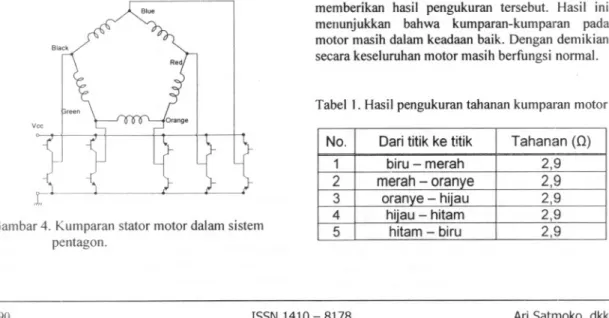
Motor stepper yang digunakan berphase 5. Sebenarnya masing-masing phase tersebut bersifat independent sehingga membutuhkan 10 titik untuk mengontrol arus yang mengalir. Namun karena pengkabelan menggunakan sistem pentagon (Iihat Gambar 4), maka jumlah titik kabel yang dibutuhkan hanya 5.
Sh<11t Phase A HASIL DAN PEMBAHASAN
Gambar 3. Susunan kumparan dalam motor stepper Ketika phase B diaktitkan dan phase lainnya dinonaktitkan, fenomena serupa sebelumnya terjadi dengan magnet stator phase B menarik rotor cup 2. Dengan kata lain, setiap pergantian phase dari A ke B akan menyebabkan rotor berputar sejauh 0,72 0. Begitu seterusnya bila pengaktifan phase beralih dari B ke C, ke D, ke E, dan seterusnya. Apabila diinginkan putaran yang berlawanan, maka tinggal membalikkan arah pengaktifan magnet-magnet pada stator. l1ustrasi di atas menunjukkan gerakan motor dengan pengaktifan I phase. Dalam kondisi sebenamya, pada saat bersamaan empat atau lima phase dapat sekaligus dioperasikan sehingga menghasilkan motor dengan kekuatan torsi yang tinggi.
Gambar 4. Kumparan stator motor dalam sistem pentagon.
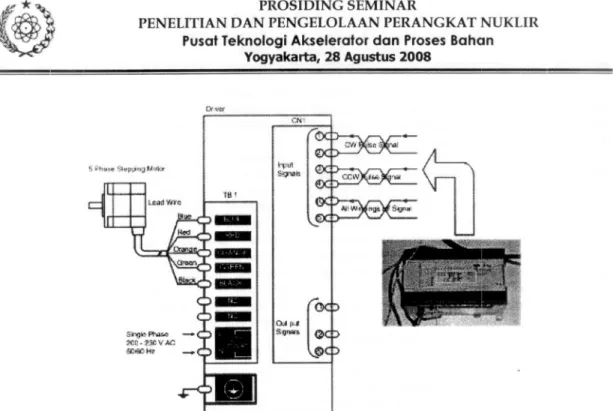
Motor stepper 5 phase yang digunakan bertipe PK-5913-A. Motor ini dilengkapi dengan driver yang dapat memberikan perintah kepada motor untuk melakukan gerakan putar baik dalam arah maupun besar langkah putaran. Motor disusun sesuai dengan petunjuk pengoperasian yang ada. Mengingat tidak semua fasilitas yang disediakan oleh paket motor dan driver dimanfaatkan maka hanya rangkaian-rangkaian tertentu yang disusun[4J. PLC bertipe Omron digunakan untuk mengontrol masukan-masukan pada driver (Iihat Gambar 5). Setelah semua pengkabelan tersusun, sistem tersebut diuji coba. Sesuai dengan perintah PLC, motor dapat berputar. Namun temyata langkah putaran melebihi dari sudut putar yang seharusnya. Serangkaian uji coba dilakukan dengan memberi 10 pulsa signal pada driver dan me$tinya hanya menghasilkan sudut sebesar 7,2° (10 step x O,72°/step). Namun temyata, sudut yang dihasilkan lebih besar dan tidak menentu dengan kisaran 15° hingga 30°. Berbagai kemungkinan ditelaah untuk menyelesaikan permasalahan seperti kerusakan pada komponen-komponen (motor, driver dan PLC), kesalahan pengkabelan dan fenomena bouncing.
Untuk meyakinkan bahwa motor masih dalam keadaan bagus, tahanan masing-masing kumparan diukur menggunakan multimeter. Tabel 1 memberikan hasil pengukuran terse but. Hasil ini menunjukkan bahwa kumparan-kumparan pada motor masih dalam keadaan baik. Dengan demikian secara keseluruhan motor masih berfungsi normal.
Tabel I. Hasil pengukuran tahanan kumparan motor No. Dari titik ke titikTahanan (0)
1 biru - merah 2,9 2 merah - oranve 2,9
3
oranve - hiiau 2,9 4 hiiau - hitam 2,95
hitam - biru 2,9Sh1),'!-Pt't.}s;¢
-~1fi-',1I>V M: ~~H7
Gambar 5. Rangkaian antara motor stepper dan PLC Evaluasi berikutnya adalah memeriksa
driver motor. Program dalam PLC telah dibuat sedemikian rupa sehingga setelah menjalani beberapa step putaran, motor berada dalam keadaan standby. Keadaan ini mengijinkan dilakukannya pengukuran tegangan output dari driver. Beberapa kali pengukuran menunjukkan bahwa tegangan-tegangan antara titik-titik pentagon berdekatan mengindikasikan angka yang konstan seperti OV
dan
±
2,2 V. Hasil ini menunjukkan bahwa hasil output dari driver masih seperti spesifikasi yang ada.Komponen PLC juga diperiksa. Pembuktian dilakukan dengan memeriksa apakah output sudah sesuai dengan pemrograman yang telah diimplementasikan pada PLC. Melalui pemrograman sederhana terbukti bahwa PLC tersebut masih berfungsi normal.
Setelah semua komponen terbukti masih dalam keadaan bagus, pemeriksaan berikutnya mengarah pada sistem pengkabelan. Hal ini dimungkinkan karena perakitan elemen konektor dan kabel dirangkai secara manual yang memungkinkan terjadinya kesalahan. Pemeriksaan secara hati-hati menggunakan multimeter dari berbagai titik per titik menunjukkan bahwa pengkabelan telah sesuai dengan yang dikehendaki.
Karena semua komponen dan pengkabelan telah dianggap benar, maka muncul dugaan adanya fenomena bouncing, PLC memberikan perintah kepada driver melalui pemberian pulsa dari keadaan rendah (low:OV) ke tinggi (high: 2-5V). Pemberian pulsa ini dilakukan dengan sebuah rangkaian di mana sebuah sumber tegangan dilewatkan melalui output PLC yang berfungsi seperti saklar. Dengan
demikian apabila PLC membuka saklar pada output tersebut, rangkaian dalam keadaan low. Dan ketika PLC menutup output tersebut, sumber tegangan akan memberika pulsa high. Efek bouncing akan muncul bila proses dari buka ke tutup saklar tidak sempuma. Sebelum saklar menutup dengan sempuma teIjadi semacam getaran yang mengakibatkan titik kontak tidak sempuma. Meski keadaan ini hanya berlangsung sesaat namun dapat terdeteksi oleh peralatan tertentu seperti misalnya osiloskop.
Penelusuran lebih
I
anjut mengantarkan temuan bahwa PLC yang digunakan tersebut bertipe relay. Seperti yang telah diketahui, relay ini bekerja dengan sistem magnetik dan kontak mekanik. Kontak mekanik pada relay inilah yang diduga menyebabkan efek bouncing. Proses buka tutup relay PLC mengakibatkan timbulnya osilasi tegangan sesaat. Secara digital oleh driver motor stepper, osilasi tegangan ini dianggap sebagai perubahan pulsa antara niai 0 dan nilaiI.
Berapa jumlah perubahan pulsa ini tidak menentu dan bersifat acak. Hal inilah yang menyebabkan sudut yang dihasilkan oleh motor stepper setelah diberi "10 perubahan signal" lebih besar dari seharusnya dan besamya sudut bervariasi.Osilasi ini mempunyai frekuensi yang sangat tinggi dan tidak terdeteksi menggunakan peralatan multimeter atau sejenisnya. Sehingga tanpa alat yang memadai (misalnya osiloskop), sulit bagi manusia untuk memerik3a keberadaan efek bouncing. Efek bouncing dapat dipecahkan dengan menggunakan dua cara yakni secara software (melalui pemrograman) dan secara hardware (penambahan komponen elektronik).
PENELITIAN DAN PENGELOLAAN PERANGKA T NUKLIR
Pusat Teknologi Akselerator don Proses Bahan
Yogyakarta, 28 Agustus 2008
DAFT AR PUST AKA
TANYA JAWAB
Programmable Logic Elektronika Negeri Teknologi Sepuluh Pemecahan efek bouncing dengan
pemrograman berasumsi bahwa begitu terjadi pemberian pulsa digital, maka dilakukan pengaturan delay sehingga osilasi tegangan yang menyertai secara sesaat diabaikan. Pengaturan delay ini dilakukan melalui pemrograman. Pemeriksaan program PLC telah dilakukan dengan merubah-rubah lama fungsi timer. Namun ternyata motor masih berputar lebih jauh dari yang diharapkan. Pemecahan efek bouncing melalui pemrograman PLC tidak dapat dilakukan karena justru penyebab bouncing ini ada pada outputnya. Output ini sudah di luar jangkauan pemrograman.
Pemecahan efek bouncing melalui penambahan hardware dilakukan dengan melokalisir titik yang diduga memberikan efek bouncing dan kemudian menambahkan komponen kapasitor pada titik tersebut. Dari evaluasi diperoleh. bahwa penyebab bouncing kemungkinan berada pada signal dari PLC yang diterima oleh driver motor. Untuk mengatasinya, maka ditambahkanlah komponen kapasitor pada lokasi tersebut. Penambahan kapasitor bertujuan untuk meratakan arus. Sesuai dengan karakternya, kapasitor ini menyimpan arus ketika sedang dialiri listrik dan sebaliknya melepaskan arus ketika aliran listrik dihentikan. Ketika relay PLC dihidupkan, maka kapasitor tersebut langsung terisi pada kontak pertama. Ketika sumber tegangan putus dalam waktu yang sangat singkat, kapasitor beralih fungsi menjadi sumber tegangan. Dengan demikian ketika terjadi osilasi tegangan, maka kapasitor ini berfungsi sebagai penstabil sumber tegangan. Akibatnya efek bouncing menjadi lenyap. Dan terbukti setelah dilakukan uji coba, gerakan motor stepper menempuh jarak putar seperti yang dikehendaki.
Penambahan kapasitor akan menyebabkan delay pad a pemberian pulsa. Lama delay tergantung pada besarnya kapasitas kapasitor. Hal ini akan berujung pada kecepatan motor. Penentuan besarnya kapasitor dapat menggunakan osiloskop disertai dengan perhitungan matematika. Namun untuk permasalahan ini belum dianalisis lebih lanjut mengingat kecepatan motor stepper tidak terlalu kritis dan penggunaan kapasitor keramik sebesar 10 pF telah memadai.
KESIMPULAN
Dalam rangka mengefisienkan kegiatan eksperimen menggunakan instalasi BETA, pengembangan telah dilakukan untuk mengganti proses pemutaran regulator trafo secara manual menjadi otomatis. Pengembangan ini dilakukan dengan cara memasang sebuah motor stepper bertipe 5 phase pada tombol regulator daya. Gerakan motor stepper ini dikendalikan oleh sebuah
PLC. Berbagai permasalahan timbul selama proses pengembangan ini. Salah satunya adalah efek bouncing yang ternyata berasal dari signal keluaran PLC. Untuk memecahan masalah ini, maka dipasanglah sebuah komponen kapasitor pada lokasi tersebut. Sesuai dengan karakternya, kapasitor ini menyimpan arus ketika sedang dialiri listrik dan sebaliknya melepaskan arus ketika aliran listrik dihentikan. Dengan demikian ketika terjadi getaran / osilasi tegangan sesaat, kapasitor ini berfungsi sebagai penstabil sumber tegangan. Akibatnya efek bouncing menjadi lenyap. Dan terbukti setelah dilakukan uji coba dengan penambahan kapasitor, gerakan motor stepper menempuh jarak putar seperti yang dikehendaki.
I. KHAIRUL HANDONO, Eksperimen Refloding pada Untai Uji Beta: Pengaruh Temperatur Masukan pada Kecepatatl Pembasahan, Prosiding Presentasi Ilmiah Teknologi Keselamatan Nuklir VIII, ISSN No.1410-0533. Tahun 2003
2. ANANG TJAHJONO, Controller, Politeknik Surabaya, Institut Nopember, Tahun 1998.
3. ANONIM, Oriental Motor General Catalogue, 2007
4. EDY SUMARNO, Pembuatan Program PLC untuk Pengontrolan Gerakan Regulator Tegangan Berdaya
5
KVA pada Instalasi QUEEN-I, makalah diajukan pada Seminar Nasional Penelitian dan Pengelolaan Perangkat Nuklir, Yogyakarta 28 Agustus 2008Nurhidayat
~ Pada PLC terdapat output (Y) yang lebih dari satu, apakah pada output yang lain (Yo - Yn ) terjadi bouncing?
AriSatmoko
~ Dalam pengembangan yang kami lakukan. kami hanya menggunakan satu output (Yo)
saja. Output-output lain tidak digunakan. Namun dipastikan. karena semua output memiliki tipe yang sama yaitu relay mekanik maka efek bouncing akan terjadi juga pada output- output lain.
}- Dalam presentasi disebutkan dengan memasang kapasitor sebesar 1 pF "sudah cukup memadai" untuk mengatasi fenomena bouncing. Apakah dalam pengujian juga telah dicoba memasang kapasitor dengan kapasitansi di atas ataupun di bawah 1 pF? Bagaimana hasilnya? Mengapa dikatakan 1 pF sudah cukup memadai?
Ar; Satmoko
<}Koreksi bukan I pF tapi 10 pF.
<} Ya. kita sudah mencoba menggunakan kapasitor lain dengan kapasitansi yang berbeda, namun hasi/nya sama saja. Penggunaan kapasitor yang berbeOOx akan
menentukan kecepatan maksimum motor stepper tersebut. Tapi karena dalam kasus ini, kecepatan m9tor tidak begitu krusial maka solosi dengan 10 pF dianggap memadai.
Nugroho L
~ Apakah sudah dicoba dibandingkan keandalan motor stepper yang lain.
~ Apakah peristiwa bouncing mesti terjadi pada motor stepper.
Ar; Satmoko
<}Kami tidak mencoba menggunakan motor stepper lain. Namun bisa dipastikan motor stepper lain bisa digunakan dengan syarat kekuatan momen putarnya mencukupi. <}TiOOk harus pada motor stepper. Masalah
bouncing adalah masalah elektronik, sehingga dapat terjadi dimana saja.