ISBN 978-979-15035-1-8
PROSIDING
SEMINAR NASIONAL EMBEDDED SYSTEM
“Revitalisasi Klaster Industri Perangkat Telematika Nasional”
Bandung, 20 September 2012
Pusat Penelitian Informatika
Lembaga Ilmu Pengetahuan Indonesia
PROSIDING
SEMINAR NASIONAL EMBEDDED SYSTEM
“Revitalisasi Klaster Industri Perangkat Telematika Nasional”
Bandung, 20 September 2012
Pusat Penelitian Informatika
Lembaga Ilmu Pengetahuan Indonesia
| Seminar Nasional Embedded System, Bandung 20 September 2012
ii
KOMITE PROGRAM DAN KOMITE PENGARAH
Penanggung Jawab :
Deputi Bidang Ilmu Pengetahuan Teknik-LIPI Kepala Pusat Penelitian Informatika-LIPI
Komite Program dan Dewan Penyunting
Program Chairs :
Rifki Sadikin (Teknik Komputer, Puslit Informatika-LIPI)
Purnomo Husnul Khotimah (Sistem Kendali, Puslit Informatika-LIPI) Wiwin Suwarningsih (Teknik Informatika, Puslit Informatika-LIPI)
Anggota:
Wawan Wardiana (Teknik Komputer, Puslit Informatika-LIPI) Evandri (Teknik Informatika, Puslit Informatika-LIPI)
Djohar Syamsi (Sistem Kendali, Puslit Informatika-LIPI)
R. Budiarianto Suryo Kusumo (Teknik Komputer, Puslit Informatika-LIPI) Puji Lestari (Teknik Komputer, Puslit Informatika-LIPI)
Edi Kurniawan (Sistem Kendali, Swinburne University of Technology, Melbourne, Australia) Hilman Ferdinandus Pardede (Teknik Komputer, Tokyo Institute oh Technology, Japan) Esa Perkasa (Teknik Informatika, Universitas Teknologi PETRONAS, Malaysia)
Andria Arisa (Teknik Informatika, Universitӓt Konstanz, Germany)
Dikdik Krisnandi (Sistem Kendali, Technicshe Universitӓt Kaiserslautern, Germany)
Komite Pengarah
Wawan Wardiana (Pusat Penelitian Informatika LIPI) Djohar Syamsi (Pusat Penelitian Informatika LIPI) Evandri (Pusat Penelitian Informatika LIPI)
| Seminar Nasional Embedded System, Bandung 20 September 2012 iii
PANITIA PELAKSANA
Ketua Pelaksana : Arif Lukman Sekretaris I : Bambang Sugiarto Sekretaris II : Iftitahu Ni’mah Bendahara I : Lintang Dwi Febridiani Bendahara II : Tugiyarno
Seksi Seminar Utama : Agus Subekti Suyoto
Seksi Call of Paper : Wiwin Suwarningsih. Rifki Sadikin
Seksi Workshop : Ana Heryana Sahrul Arif
Seksi Logistik : Eyi Kusaeril Habibi Efendi Zaenudin Seksi Publikasi dan : Ferdian Yunazar Kerjasama Akbari Indra Basuki
Oka Mahendra
Seksi Acara : Dewi Saraswati An an Sarah Hertiana
| Seminar Nasional Embedded System, Bandung 20 September 2012
iv
KATA PENGANTAR
Prosiding Seminar Nasional Embedded System 2012 ini merupakan kumpulan makalah yang diterima dan diseleksi oleh dewan penyunting sebagai salah satu rangkaian acara Seminar Nasional Embedded System 2012.
Seminar Nasional Embedded System 2012 diselenggarakan oleh Pusat Penelitian Informatika, Lembaga Ilmu Pengetahuan Indonesia bekerja sama dengan Direktorat Jenderal Aplikasi Informatika Kementerian Negara Komunikasi dan Informatika Republik Indonesia. Selain sebagai wadah diseminasi iptek di bidang embedded
system dari berbagai lembaga litbangyasa di Indonesia, seminar ini juga bertujuan untuk memfasilitasi dan
memformulasikan kolaborasi strategis antara lembaga litbangyasa, pemerintah, dan sektor swasta dalam rangka mewujudkan klaster industri embedded system di Indonesia.
Rangkaian acara seminar nasional ini dimulai dengan penyelenggaraan workshop "Pengembangan Piranti Cerdas Berbasis Linux Embedded" pada hari Rabu, tanggal 19 september 2012 bertempat di Lab Komputer, Pusat Penelitian Informatika, Gedung 20 Lt.3 Komplek LIPI Jl. Cisitu No. 21/154D Bandung. Workshop tersebut diikuti oleh para praktisi dan pengembang embedded system yang berasal dari kalangan industri maupun lembaga litbangyasa.
Adapun acara puncak seminar nasional Embedded System diselenggarakan di Hotel Aston Primera Pasteur Jl. Dr. Djunjunan No. 96 Bandung pada hari Kamis, tanggal 20 September 2012 dengan mengundang para pembicara kunci di antaranya Bapak Dr. Ir. Ashwin Sasongko (Direktur Jenderal Aplikasi Informatika Kementerian Negara Komunikasi dan Informatika Republik Indonesia), Bapak Tikno Sutisna (Direktur Utama PT INTI) dan Prof. Dr. Ir. Suhono Harso Supangkat (Guru Besar Teknologi Informasi dan Komunikasi Sekolah Teknik Elektro dan Informatika Institut Teknologi Bandung) yang mana bersama-sama dengan Bapak Ir. Hari Purwanto (Staf Ahli Menteri Negara Riset dan Teknologi Bidang Hankam, TIK dan Transportasi) selaku moderator seminar, telah membahas berbagai peluang dan tantangan dalam rangka merevitalisasi klaster industri perangkat telematika nasional.
Seminar Nasional Embedded System 2012 tidak akan mungkin terjadi tanpa kontribusi dan kerja keras dari pembicara kunci, semua pemakalah dan peserta non makalah, para komite program, komite pengarah serta panitia penyelenggara. Dalam kesempatan ini perkenankan kami untuk menyampaikan penghargaan yang sebesar-besarnya dan ucapan terimakasih kepada semua pihak yang telah mendukung kelancaran pelaksanaan Seminar Nasional Embedded System ini. Teriring pula permohonan maaf yang sedalam-dalamnya bilamana terdapat hal-hal yang kurang berkenan dalam penyelenggaraan seminar ini.
Bandung, 20 Oktober 2012.
Arif Lukman Ketua Panitia
| Seminar Nasional Embedded System, Bandung 20 September 2012 v
DAFTAR ISI
Halaman Judul I
Susunan Komite Program dan Komite Pengarah ii
Susunan Panitia Pelaksana iii
Kata Pengantar v
Daftar Isi vi
Ekstraksi Ciri Pada Pengenalan Sistem Isyarat Bahasa Indonesia Berbasis Sensor Flex Dan Accelerometer
Mohammand Iqbal, Endang Supriyati
1
Implementasi ATMega 128 Pada Reaktor Biodiesel Oil
Mila Fauziyah, Denda Dewatama, Zakiyah Irfin
9
Otomasi Mesin Pemotong Kayu Berbasis PLD Menggunakan VHDL
Supriatna Adhisuwignjo, Ratna Ika Putri, Sungkono
13
Penerapan Konsep Event Driven pada Perangkat Lunak Sistem Embedded
Ricky Henry Rawung, Arif Sasongko
19
Pengujian Anti Power Faillure Smart Card untuk Provider Telekomunikasi
Benediktus Dwi Desiyanto, Wisnu Anggoro, Fakih Irsyadi
25
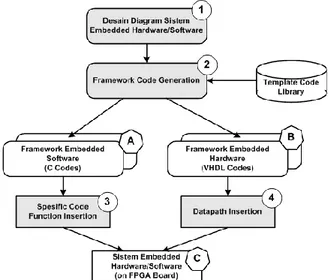
Perancangan dan Implementasi Perangkat Generator Kode Framework Sistem Embedded Hardware/Software Berbasis Model Event-Driven
I Wayan Sutaya, Arif Sasongko
29
Survey Metode Prediksi Penyakit
Rika Rosnelly, Edi Winarko
35
Pengembangan Komunitas Sistem Embedded dan Robotika di Universitas Dipenogoro
Adian Fatchur Rochim, Eko Didik Widianto
41
Rancang Bangun Aplikasi Tuntunan Praktis P3K Pada Perangkat Bergerak
Wiwin Suwarningsih
45
Penggunaan LabVIEW : Perancangan Exciter menggunakan VCO untuk peralatan Jamming
Elan Djaelani
51
Rancang Bangun Alat Pengukur Curah Hujan (APCH) Online sebagai Sistem Monitoring Cuaca di Kecamatan Cilengkrang,
Herlan, Sahrul Arif, Ferdian Yunazar, Elli A. Gojali, Ade Ramdan
57
Implementasi Qt Embedded Linux pada SBC Alix 3d3 sebagai Antarmuka Grafis Stasiun Cuaca Nirkabel
Ana Heryana, Sahrul Arif, Lintang Dwi Febridiani
| Seminar Nasional Embedded System, Bandung 20 September 2012
vi
Implementasi dan Unjuk Kinerja Penggunaan Routerboard R52 untuk Komunikasi Data
Wireless Weather Station pada Daerah Sub-Urban di Atas 5 Km
Ferdian Yunazar,Efendi Zaenudin, Suyoto
69
Sistem Akuisisi Data Berbasis Mikrokontroler ATM Mega 128 untuk Stasiun Cuaca
Oka Mahendra, Bambang Sugiarto
75
Pembangkitan Kunci Rahasia dengan Deffie-Hellman Key Exchage pada Jaringan Sensor Nirkabel Zigbee
Rifki Sadikin, Sahrul Arif
| Seminar Nasional Embedded System, Bandung 20 September 2012 1
Ekstraksi Ciri Pada Pengenalan Sistem Isyarat Bahasa Indonesia Berbasis
Sensor Flex Dan Accelerometer
Mohammad Iqbal
Teknik Elektro, Universitas Muria Kudus [email protected]
Endang Supriyati
Teknik Informatika, Universitas Muria Kudus [email protected]
Abstract
Feature extraction is performed to obtain quantities that show the object specificity to identify. The good feature extraction algorithm makes the classification process more effective and efficient. In this research, five types of feature extraction are developed, using statistical approach, quantization or combination of both. Sensors are used to make gloves, i.e. flex sensors to measure finger bending and accelerometer to measure movement in the x, y, z axes. From these sensor data, the feature extraction is made. The obtained feature vector is used for sign recognition by applying Dynamic Time Warping method (DTW) and Euclidean Distance. Reference data (template) that the best matches the distance measured by the most minimum value (distance). Tests carried out using a dataset with 1000 data consists of 50 classes (word sign), where each class composed of 20 data. The test data using 10 data for each class, and the reference data using the rest i.e. 10 data for each class. The test results show that the achieved highest accuracy are 99.6%.
Keywords: sign language, flex sensor, accelerometer, feature extraction, DTW, euclidean distance
Abstrak
Ekstraksi ciri dilakukan untuk mendapatkan besaran-besaran yang menunjukkan kekhususan objek yang ingin dikenali. Algoritma ekstraksi ciri yang baik membuat proses klasifikasi lebih efektif dan efisien. Dalam penelitian ini dikembangkan 5 jenis ekstraksi ciri, yang menggunakan pendekatan statistik, kuantisasi atau kombinasi keduanya. Sensor yang digunakan untuk membuat sarung tangan adalah flex sensor untuk mengukur tekukan jari dan accelerometer untuk mengukur gerakan pada sumbu x,y,z. Dari data-data sensor dilakukan ekstraksi ciri yaitu bentuk lekukan jari-jari tangan dan gerakan tangan terhadap sumbu x, y dan z. Vektor ciri yang diperoleh digunakan untuk pengenalan isyarat dengan metode Dynamic Time Warping (DTW) dan Jaurak Euclidian (Euclidian Distance). Data referensi (template) yang paling cocok diukur berdasarkan nilai jarak (distance) yang paling minimum. Pengujian dengan dilakukan menggunakan dataset 1000 data yang terdiri dari 50 kelas (isyarat kata), dimana masing-masing kelas terdiri dari 20 data. Untuk data pengujian diambil 10 data untuk tiap-tiap kelas, dan 10 sisanya sebagai data referensi. Hasil pengujian menunjukkan akurasi tertinggi mencapai 99,6%.
Kata kunci: bahasa isyarat, flex sensor, accelerometer, ekstraksi ciri
1. Pendahuluan
Bahasa isyarat Indonesia merupakan alat
komunikasi yang utama bagi penyandang tuna rungu dan tuna wicara di Indonesia. Penyandang tuna rungu/wicara menggunakan penerjemah ataupun tulisan untuk berkomunikasi dengan orang normal. Akan tetapi penerjemah sering mempunyai tarif yang mahal, demikian pula resiko ketergantungan dan kehilangan privasi.
Kemajuan di bidang pengenalan pola (pattern
recognition) memberi harapan untuk otomatisasi
sistem penerjemah gerak isyarat, meskipun banyak kesulitan yang dihadapi sebelum sistem tersebut menjadi kenyataan.
Kategori penelitian yang dilakukan, dapat dibedakan menjadi dua yaitu pendekatan berbasis
visi komputer (computer vision) [5,6] dan
pendekatan berbasis data sensor, [7,8,9]. Pada pendekatan berbasis visi komputer digunakan file (berkas) video yang disimpan sebelumnya atau
langsung melalui kamera yang menangkap gerakan bahasa isyarat. Pendekatan berbasis data sensor, dilakukan dengan menggunakan rangkaian sensor yang terintegrasi dengan sarung tangan (glove). Sensor ini menghasilkan besaran listrik yang terukur, untuk mengetahui derajat tekukan jari-jari tangan dan gerakan tangan. Sedangkan metode yang banyak digunakan adalah HMM (Hidden Markov Model) [6,7] dan ANN (Artificial Neural Network) [5,8,9].
Khusus untuk pengenalan bahasa isyarat
Indonesia berbasis sensor telah dilakukan penelitian oleh Evita [9] dengan menggunakan metode ANN, dimana data-data yang diolah, diperoleh dari sensor
flex, yang meliputi informasi lelukan jari-jari tangan,
lekukan pergelangan, lekukan lengan dan lekukan bahu. Pada makalah ini diusulkan metode Dynamic
Time Warping (DTW) untuk pengenalan bahasa
isyarat Indonesia berbasis sensor. Pada penelitian ini, selain digunakan sensor flex untuk mengetahui informasi bentuk tangan oleh lekukan jari-jari, juga digunakan sensor accelerometer untuk mendapatkan
| Seminar Nasional Embedded System, Bandung 20 September 2012
2
informasi gerakan tangan. DTW merupakan teknik penyelarasan (aligment) data yang bersifat sekuensial (time series). Teknik DTW yang secara umum telah digunakan pada pengenalan suara, tetapi dalam perkembangannya, DTW juga telah diterapkan untuk aplikasi lain, diantaranya untuk pengenalan gerak isyarat (gesture)[1][3], data mining [4] dan verfikasi tanda tangan[2].
2. Sistem Isyarat Bahasa Indonesia
Bahasa isyarat isyarat Indonesia juga dikenal dengan istilah SIBI (Sistem Isyarat Bahasa Indonesia). Komponen isyarat yang utama adalah bentukan jari-jari tangan dan gerakan tangan. Pada sebagian besar isyarat kata, gerakan tangan lebih dominan dan bervariasi dibandingkan dengan bentukan jari-jari tangan. Pada penelitian Evita[9] yang hanya menggunakan sensor flex, akurasi pengenalannya turun drastis dari 83,18% untuk isyarat kata yang statis menjadi 49,58% untuk isyarat kata yang bergerak.
Dalam penelitian ini, pengenalan ditujukan untuk isyarat kata bahasa Indonesia, dengan penambahan jenis sensor lain. Dua informasi komponen utama isyarat kata diukur dengan penggunaan sensor flex dan sensor accelerometer yang diintegrasikan dalam bentuk sarung tangan sebagai piranti akusisi data. Gambar 1 menunjukkan diagram blok system pengenalan bahasa isyarat Indonesia .
Gambar 1. Diagram blok sistem pengenalan bahasa isyarat Indonesia
3. Sensor
Sensor yang digunakan adalah sensor flex dan sensor accelerometer. Bentuk fisik sensor flex dan sensor accelerometer diperlihatkan pada Gambar 2.
3.1 Sensor Flex
Sensor flex adalah jenis sensor resisif yang berubah nilai resistansinya ketika ada lekukan. Pada kondisi flat (tidak tertekuk), sensor flex mempunyai nilai resistansi 10 KΩ. Nilai resistansinya akan semakin membesar pada saat terjadi tekukan sampai dengan 40 KΩ pada saat tekukan maksimal[10].
Karena jari hanya mempunyai satu derajat
kebebasan, maka untuk tiap-tiap jari cukup menggunakan satu sensor flex.
3.2 Sensor Accelerometer
Sedangkan sensor accelerometer yang digunakan adalah Hitachi H48C [12] yang merupakan modul sensor buatan Parallax diintegrasi dengan ADC (Analog to Digital Converter) dan regulator
tegangan. Accelerometer dapat mendeteksi
kemiringan (tilt) dan gerakan (percepatan) pada tiga
sumbu x,y,z dengan jangkauan pengukuran
maksimal 3g (1g=9.81m/s2), non-linearity 2%
dan sensitivity 333 mV/g pada tegangan 3 Volt[9]. Sarung tangan bersensor yang digunakan untuk akuisisi data dapat dilihat pada Gambar 3.
(a) (b)
Gambar 2. Sensor yang digunakan. Sensor flex (a), Accelerator (b).
Gambar 3. Sarung tangan bersensor
4. Akuisisi Data
Tahap ini ditujukan untuk mendapatkan data-data dari sensor untuk kemudian diolah menjadi vektor fitur (feature vector), sebagaimana diperlihatkan Gambar 4. Akusisi Data Sensor Pengolahan Data Sensor (Ekstraksi Fitur) Vektor Fitur: O1 O2 O3 … OT
Gambar 4. Blok diagram akusisi data
Data-data yang diperoleh dari sensor adalah sebanyak 8 jenis data. Data-data tersebut sebagai berikut:
a. derajat tekukan jari jempol b. derajat tekukan jari telunjuk c. derajat tekukan jari tengah d. derajat tekukan jari kelingking e. derajat tekukan jari manis
f. gerakan tangan terhadap sumbu x,y,z
Kelima data lekukan jari telah dinormalisasi untuk menyamakan perbedaan nilai toleransi dari di antara sensor-sensor flex yang digunakan. Besaran lekukan jari dinormalisasi[16] pada range nilai 0 sampai 20 menggunakan persamaan 1 sebelum disimpan dalam file dataset.
20
*
max min minX
X
X
X
X
i norm
(1) Sedangkan untuk besaran akselarasi masih berupa data counting, yang diambil 8-bit MSB (Most| Seminar Nasional Embedded System, Bandung 20 September 2012 3
Significant Bit) dari 12 bit data counter-nya. Untuk mendapatkan nilai akselerasi yang sebenarnya diperlukan perhitungan khusus yang dijelaskan pada bagian ekstraksi ciri. Contoh data gerak isyarat kata ‘abang’ yang tersimpan pada dalam bentuk file dengam format teks (ibi) pada proses akusisi data diperlihatkan pada tabel 1. Data yang tersimpan adalah data sekuensial, dengan panjang (baris) yang berbeda yang bergantung jenis isyarat kata dan kecepatan gerakan pada saat melakukan isyarat. Pada contoh tabel 1, panjang data isyarat kata ‘adik’ adalah 11.
Kolom [1…5] adalah data dari sensor flex untuk lekukan jari jempol sampai dengan jari kelingking, sedangkan [6…9] adalah data dari sensor accelerometer untuk sumbu X, Y, Z dan referensi.
Baris [1..11] menunjukkan urutan data
diambil/disimpan, yaitu dari awal gerakan isyarat satu kata sampai dengan selesai gerakan isyarat kata tersebut.
Tabel 1. Contoh data sekuensial isyarat kata ‘adik’
Gerak isyarat kata bahasa Indonesia yang dilakukan mengacu pada video gerak isyarat yang terdapat pada [11] [13]yang merupakan visualisasi dari kamus sistem isyarat bahasa Indonesia.
5. Metode Pengenalan SIBI 5.1 Jarak Euclidean
Jarak Euclidean adalah metode yang paling umum digunankan untuk banyak penerapan untuk mencari derajat kemiripan (similiarity) antara dua data
sekuensial (time series). Derajat kemiripan
berdasarkan Jarak Euclidean dihitung menggunakan persamaan 2.
n i i i EuclideanP
Q
p
q
d
1 2)
(
)
,
(
(2) Metode ini bisa digunakan jika kedua data sekuensial P dan Q mempunyai panjang yang sama. Pada kasus Q dan Q dengan panjang yang tidak sama, maka Jarak Euclidean tidak dapat digunakan. Oleh karena itu diperlukan metode lain yang dapatmemetakan elemen Q terhadap elemen Q untuk mendapatkan derajat kemiripan dari dua sekuensial yang memiliki panjang berbeda.
5.2 DTW (Dinamic Time Warping)
Gerak isyarat merupakan data sekuensial. Tiap elemen data sekuensial diukur dan disimpan pada satu periode waktu yang tetap antara elemen satu dengan yang berikutnya. Salah satu metode untuk membandingkan dua data sekunesial dengan panjang yang berbeda adalah dengan algoritma Dynamic Time Warping (DTW). Penjelasan algoritma DTW secara lengkap dapat ditemukan pada [13].
DTW merupakan algoritma yang digunakan untuk mengukur kemiripan antara dua sekuensial dengan durasi (panjang) berbeda. DTW mencocokkan dua sekuensial dengan menghitung tranformasi temporal sehingga keduanya dapat diselaraskan (aligned). Penyelarasan (alignment) adalah optimal jika terukur jarak kumulatif terkecil antara dua sampel yang telah diselaraskan.
Jika diasumsikan terdapat dua data sekuensial, Q dan C, dengan panjang masing-masing n dan m dengan
Q = q1, q2, ..., qi, ..., qn
(3)
C = c1, c2, ..., cj, ...., cm (4)
Maka untuk menyelaraskan (align) kedua sekuensial tersebut mengunakan DTW, dibentuk matriks m x n
dengan elemen matriks (i,j) berupa nilai jarak d(qi,cj)
antara dua titik qi dan, yaitu d(qi,cj) = (qi– cj)2. Setiap
elemen matriks (i,j) berhubungan dengan
penyelarasan (alignment) antara titik qi dan cj
sebagaimana ditunjukkan pada Gambar 2.8.
Warping path W merupakan sekelompok elemen
matriks yang berdampingan yang mendefinisikan pemetaan antara Q dan C. Elemen ke-k dari W
dirumuskan sebagai wk = (i,j)k, sehingga
W = w1, w2, ..., wk, ..., wK (5)
dengan: max(m,n) K < m+n – 1
Sedangkan path didefinisikan sebagai jarak kumulatif D(i,j) yaitu jarak d(qi,cj) untuk elemen tersebut ditambah dengan minimum dari jarak kumulatif dari elemen bertetanggaan (adjacent).
D(i,j) = d(qi,cj) +min{D(i-1,j-1),D(i-1,j),D(i,j-1)}
(6) Setelah didapatkan warping path yang optimal maka jarak atau warping cost dihitung berdasarkan persamaan 7. DTW(Q,C) = min (7)
K k 1w
k| Seminar Nasional Embedded System, Bandung 20 September 2012
4
5.3 Perbandingan DTW dan Jarak Euclidean
Ilustrasi perbandingan antara metode DTW dan metode Jarak Euclidean pada data sekuensial ditunjukkan pada gambar 2.9, yaitu untuk data sekuensial dengan panjang sama dan panjang berbeda. Untuk panjang data sama, Jarak Euclidean akan memetakan secara sesuai urutan indeks-nya, sehingga dua data sekuensial yang berlainan fasa akan dianggap tidak mirip. Sedangkan untuk panjang
data yang berbeda, Jarak Euclidean hanya
memetakan sampai dengan indeks data sekuensial yang lebih pendek.
Gambar 5 Perbandingan DTW dan Jarak Euclidean. Panjang data sama (a), panjang data berbeda (b).
6. Ekstraksi Ciri
Ekstraksi ciri dilakukan untuk mendapatkan besaran-besaran yang menunjukkan kekhususan dari data yang diolah. Ekstraksi ciri mempunyai dua tugas yaitu mengubah parameter vektor input menjadi vektor ciri dan/atau reduksi dimensi. Vektor ciri merupakan nilai-nilai hasil pengolahan data-data flex dan data accelerometer yang kemudian diatur sedemikian rupa membentuk baris angka (nilai). Data sensor yang dibaca dari file dibagi menjadi dua bagian data, yaitu data sensor flex dan data accelerometer (Tabel 1).
6.1. Perhitungan yang digunakan 6.1.1 Histogram
Histogram merupakan salah satu cara untuk merepresentasikan data dalam bentuk distribusi fekuensi. Histogram dapat dianggap sebagai fungsi kerapatan probabilitas (probability density function) diskrit. Pendekatan histogram untuk ekstraksi ciri digunakan dalam penelitian MC Leu [4]. Dalam penelitian ini, histogram yang digunakan adalah terbagi 10 tingkatan nilai (sub-range) untuk tiap data tekukan jari tangan dan 17 tingkatan nilai untuk tiap sumbu (axis) data akselarasi telapak tangan.
6.1.2 Nilai rata-rata dan nilai simpangan baku
Pendekatan statistik sering digunakan sebagai ukuran dalam analisa data, di antranya adalah nilai rata-rata (mean) dan nilai simpangan baku (standard
deviation). Jika terdapat data sekuensial Xi dengan i
= 1,2,3 …, n dan jika nilai rata-rata dinotasikan sebagai u, maka nilai u dapat dihitung berdasarkan persamaan 8.
n i iX
n
u
11
(8)Sedangkan untuk nilai simpangan baku X yang dalam hal ini dinotasikan sebagai s, maka nilai s dapat dihitung berdasarkan persamaan 9.
n i iu
X
n
s
1 2)
(
1
(9) 6.1.3 KuantisasiKuantisasi merupakan proses untuk membatasi semua nilai yang mungkin menjadi jumlah yang terbatas. Kuantisasi yang digunakan dalam penlitian ini adalah kuantisasi non linier, yang dilakukan hanya untuk data akselerasi telapak tangan. Penggunaan kuantisasi untuk akselerasi dilakukan pada penelitian J Liu [7].
Sebelum dilakukan proses kuantisasi, nilai akselerasi yang sebenarnya untuk masing-masing sumbu x, y dan z dihitung terlebih dahulu dengan menggunakan persamaan 3.5 yang mengacu pada datasheet -nya[5].
a = (c – reff) * 0.0022 * 16 (10)
dengan
a = nilai akselarasi yang sebenarnya
c = nilai atau data counter akselarasi
reff = nilai atau data counter untuk referensi
Jika a sebagai notasi untuk akselarasi, maka ax1 menunjukkan nilai akselarasi untuk sumbu x untuk data pertama (baris pertama dalam file), ay1 untuk nilai akselarasi sumbu y data pertama, az1 untuk nilai akselarasi sumbu z data pertama, ax2 untuk
nilai akselarasi sumbu x data kedua, dan
seterusnya.Nilai akselerasi a ini relatif kecil terhadap nilai normalisasi lekukan jari, sehingga dilakukan kuantisasi[17],[18] nilai akselarasi a untuk masing-masing sumbu X, Y dan Z berdasarkan Tabel 2. (1g=9.81m/s2).
Tabel 2 Kuantisasi akselerasi
akselerasi (a) kuantisasi (k)
a > 2g 16 g < a ≤ 2g 10 < k ≤ 15 0 < a ≤ g 1 < k ≤ 10 a = 0 k = 0 -g ≤ a < 0 -10 ≤ k < 0 -2g ≤ a < -g -15 ≤ k < -10 a < -2g -16
Jika k adalah notasi untuk nilai kuantisasi akselarasi, maka kx1 menunjukkan nilai kuantisasi akselarasi untuk sumbu x untuk data pertama (baris pertama), ky1 untuk nilai kuantisasi akselarasi sumbu y data pertama, kz1 untuk nilai kuantisasi akselarasi sumbu z data pertama, kx2 untuk nilai kuantisasi akselarasi sumbu x data kedua, dan seterusnya.
| Seminar Nasional Embedded System, Bandung 20 September 2012 5
6.2 Ekstraksi ciri yang digunakan
Dalam penelitian ini digunakan 5 jenis ekstraksi ciri, yang menggunakan pendekatan statistik, kuantisasi atau kombinasi keduanya. Untuk membedakan antara jenis ekstraksi ciri yang satu dengan ekstraksi yang lain, masing-masing ekstraksi ciri diberi tambahan label A, B, C, D dan E.
6.2.1 Ekstraksi ciri A
Ekstraksi ciri A menggunakan pendekatan statistik yaitu histogram yang digunakan baik untuk data tekukan jari tangan maupun untuk data akselarasi telapak tangan. Untuk data akselarasi telapak tangan, sebelum ditransformasikan ke bentuk histogram maka dilakukan proses kuantisasi. Histogram untuk tiap data tekukan jari dibagai menjadi 10 interval (bagian) sedangkan untuk data akselarasi telapak tangan digunakan 17 interval untuk masing-masing sumbu x, y dan z. Proses ekstraksi ciri A ini menghasilkan vektor ciri dengan panjang yang sama untuk tiap sampel isyarat kata yaitu 101. Oleh karena itu, baik metode Jarak
Euclidean maupun DTW bisa digunakan. Bagan alir
ekstraksi ciri A diperlihatkan pada Gambar 6.
6.2.2 Ekstraksi ciri B
Ekstraksi ciri B menggunakan pendekatan statistik yaitu dengan menghitung nilai rata-rata dan nilai simpangan baku, yang digunakan baik untuk data tekukan jari tangan maupun untuk data akselarasi telapak tangan. Untuk data akselarasi telapak tangan, sebelum ditransformasikan ke bentuk histogram maka dilakukan proses kuantisasi. Proses ekstraksi ciri A ini menghasilkan vektor ciri dengan panjang yang sama untuk tiap sampel isyarat kata yaitu 16. Oleh karena itu, baik metode Jarak
Euclidean maupun DTW bisa digunakan. Bagan alir
ekstraksi ciri A diperlihatkan pada Gambar 7.
Data sensor
Data sensor Flex Data Accelerometer
Histogram ha1,ha2,ha3,...,ha10 hb1,hb2,hb3,...,hb10 hc1,hc2,hc3,...,hc10 hd1,hd2,hd3,...,hd10 he1,he2,he3,...,he10 Akselarasi Aktual ax1,ax2,ax3,…,axn ay1,ay2,ay3,…,ayn az1,az2,az3,…,azn Kuantisasi kx1,kx2,kx3,…,kxn ky1,ky2,ky3,…,kyn kz1,kz2,kz3,…,kzn Vektor Ciri ha1,ha2,ha3,...,ha10, hb1,hb2,hb3,...,hb10, ..., hx1,hx2,hx3,...,hx17, ..., hz1,hz2,hz3,...,hz17 Histogram hx1,hx2,hx3,...,hx17 hy1,hy2,hy3,...,hy17 hz1,hz2,hz3,...,hz17
Gambar 6 Bagan alir ekstraksi ciri A
Data sensor
Data sensor Flex Data Accelerometer
Rata-rata ua,ub,uc,ud,ue Simpangan Baku sa,sb,sc,sd,se Akselarasi Aktual ax1,ax2,ax3,…,axn ay1,ay2,ay3,…,ayn az1,az2,az3,…,azn Kuantisasi kx1,kx2,kx3,…,kxn ky1,ky2,ky3,…,kyn kz1,kz2,kz3,…,kzn Rata-rata ux,uy,uz Simpangan Baku sx,sy,sz Vektor Ciri ua,ub,uc,ud,ue,sa,sb,sc,sd,se,ux,uy,uz, sx,sy,sz
Gambar 7 Bagan alir ekstraksi ciri B
6.2.3 Ekstraksi ciri C
Ekstraksi ciri C menggunakan kuantisasi tetapi hanya untuk data akselarasi telapak tangan. Sedangkan untuk data tekukan jari tangan masih bentuk aslinya yang terbaca pada saat proses akusisi data. Proses ekstraksi ciri C ini menghasilkan vektor ciri dengan panjang yang tidak sama untuk tiap sampel isyarat kata, bahkan hal ini juga terjadi untuk sampel isyarat kata dalam satu kelas yang sama karena perbedaan jumlah data yang tersimpan. Kerana memiliki panjang data yang berbeda, maka hanya algoritma DTW bisa digunakan. Bagan alir ekstraksi ciri C diperlihatkan pada Gambar 8.
Data sensor
Data sensor Flex fa1,fa2,fa3,…,fan fb1,fb2,fb3,…,fbn fc1,fc2,fc3,…,fcn fd1,fd2,fd3,…,fdn fe1,fe2,fe3,…,fen Data Accelerometer Akselarasi Aktual ax1,ax2,ax3,…,axn ay1,ay2,ay3,…,ayn az1,az2,az3,…,azn Kuantisasi kx1,kx2,kx3,…,kxn ky1,ky2,ky3,…,kyn kz1,kz2,kz3,…,kzn Vektor Ciri fa1,fb1,fc1,fd1,fe1,kx1,ky1,kz1, fa2,fb2,fc2,fd2,fe2,kx2,ky2,kz2, …, kxn,kxn,kxn
Gambar 8 Bagan alir ekstraksi ciri C
6.2.4 Ekstraksi ciri D
Ekstraksi ciri D menggunakan kuantisasi dan pendekatan statistik yaitu dengan menghitung nilai rata-rata dan nilai simpangan baku, tetapi hanya untuk data akselarasi telapak tangan. Sedangkan untuk data tekukan jari tangan masih bentuk aslinya yang terbaca pada saat proses akusisi data. Proses ekstraksi ciri D ini menghasilkan vektor ciri dengan panjang yang tidak sama untuk tiap sampel isyarat kata, bahkan hal ini juga terjadi untuk sampel isyarat kata dalam satu kelas yang sama karena perbedaan jumlah data yang tersimpan. Kerana memiliki panjang data yang berbeda, maka hanya algoritma DTW bisa digunakan. Bagan alir ekstraksi ciri D diperlihatkan pada Gambar 9.
| Seminar Nasional Embedded System, Bandung 20 September 2012 6 Data sensor Data Accelerometer Akselarasi Aktual ax1,ax2,ax3,…,axn ay1,ay2,ay3,…,ayn az1,az2,az3,…,azn Kuantisasi kx1,kx2,kx3,…,kxn ky1,ky2,ky3,…,kyn kz1,kz2,kz3,…,kzn Rata-rata ux,uy,uz Simpangan Baku sx,sy,sz Vektor Ciri fa1,fb1,fc1,fd1,fe1, fa2,fb2,fc2,fd2,fe2, …,fan,fbn,fcn,fdn,fen, …,ux,uy,uz, sx,sy,sz
Data sensor Flex
fa1,fa2,fa3,…,fan
fb1,fb2,fb3,…,fbn
fc1,fc2,fc3,…,fcn
fd1,fd2,fd3,…,fdn
fe1,fe2,fe3,…,fen
Gambar 9 Bagan alir ekstraksi ciri D
6.2.5 Ekstraksi ciri E
Ekstraksi ciri E menggunakan kuantisasi tetapi hanya untuk data akselarasi telapak tangan. Sedangkan untuk data tekukan jari tangan digunakan pendekatan statistik dengan menghitung nilai rata-rata dan nilai simpangan baku. Proses ekstraksi ciri E ini menghasilkan vektor ciri dengan panjang yang tidak sama untuk tiap sampel isyarat kata, bahkan hal ini juga terjadi untuk sampel isyarat kata dalam satu kelas yang sama karena perbedaan jumlah data yang tersimpan. Kerana memiliki panjang data yang
berbeda, maka hanya algoritma DTW bisa
digunakan. Bagan alir ekstraksi ciri E diperlihatkan pada Gambar 10.
Data sensor
Data sensor Flex Data Accelerometer
Rata-rata ua,ub,uc,ud,ue Simpangan Baku sa,sb,sc,sd,se Akselarasi Aktual ax1,ax2,ax3,…,axn ay1,ay2,ay3,…,ayn az1,az2,az3,…,azn Kuantisasi kx1,kx2,kx3,…,kxn ky1,ky2,ky3,…,kyn kz1,kz2,kz3,…,kzn Vektor Ciri ua,ub,uc,ud,ue,sa,sb,sc,sd,se,kx1,ky1,kz1 ,kx2,ky2,kz2, kx3,ky3,kz3, …, kxn,kxn,kxn
Gambar 10 Bagan alir ekstraksi ciri E
6.3 Vektor Ciri
Vektor ciri merupakan barisan data yang merupakan hasil dari proses ekstraksi ciri. Vektor ciri didapatkan dengan cara menderetkan nilai-nilai yang didapatkan dari ekstraksi ciri yang mencakup ciri-ciri untuk tekukan jari dan akselerasi telapak tapak. Panjang data untuk vektor ciri untuk masing-masing ekstraksi ciri adalah bergantung ekstraksi ciri
yang digunakan. Ekstraksi ciri A dan B
menghasilkan panjang data vektor ciri yang sama untuk tiap sampel dalam data uji, sedangkan ekstraksi C, D dan E menghasilkan panjang data vektor ciri yang berbeda.
Contoh hasil ekstraksi ciri E untuk data isyarat kata ’kami’ pada tabel 3.2 yang digambarkan dalam
bentuk grafik ditunjukkan pada Gambar 11. Panjang data vektor ciri tersebut adalah 61.
Gambar 11 Contoh grafik vektor ciri isyarat kata ’kami’
7. Uji Coba dan Pembahasan 7.1 Evaluasi Kinerja Sistem
Kinerja sistem pengenalan bahasa isyarat ini
dievaluasi menggunakan matriks kebingungan
(confusion matrix) [14]. Instrumen yang digunakan untuk mengukur kinerja sistem adalah akurasi (accuracy).
7.2 Pengujian Pertama Menggunakan Metode Jarak Euclidean
(a)
(b)
Gambar 12. Grafik hasil pengujian pertama dengan metode Jarak Euclidean; (a) pengaruh terhadap akurasi; (b) pengaruh terhadap waktu pengujian
Pengujian pertama dilakukan untuk mengetahui pengaruh jumlah sampel per kelas data referensi terhadap akurasi dan waktu pengujian. Jumlah sampel yang digunakan adalah 1 sampai dengan 10. Pertama-tama dipilih 1 sampel untuk mewakili tiap kelas dalam data referensi, kemudian dilakukan proses pengenalan untuk semua data pengujian. Setelah dilakukan pencatatan hasil akurasi dan waktu
| Seminar Nasional Embedded System, Bandung 20 September 2012 7
pengujian untuk 500 sampel data pengujian, maka
proses pengenalan diulangi lagi dengan
menggunakan yang sampel tiap kelas data referensi yang lebih besar yaitu 1, 2, 3 sampai dengan 10. Pengujian I menggunakan metode Jarak Euclidean untuk membandingkan ekstraksi ciri A dan ekstraksi ciri B. Gambar 3 menunjukkan grafik hasil pengujian I sedangkan untuk data hasil pengujian pertama dapat dilihat pada lampiran B.
Dari Gambar 3, dengan menggunakan metode Jarak Euclidean, akurasi maksimal dicapai adalah 97,6% dan waktu pengujian minimal 7,797 detik diperoleh dengan menggunakan ekstraksi ciri B.
7.3 Pengujian Kedua Menggunakan Metode DTW
(a)
(b)
Gambar 13. Grafik hasil pengujian pertama dengan metode DTW; (a) pengaruh terhadap akurasi; (b)
pengaruh terhadap waktu pengujian
Pengujian kedua dilakukan untuk mengetahui pengaruh jumlah sampel per kelas data referensi terhadap akurasi dan waktu pengujian. Jumlah sampel yang digunakan adalah 1 sampai dengan 10. Pertama-tama dipilih 1 sampel untuk mewakili tiap kelas dalam data referensi, kemudian dilakukan proses pengenalan untuk semua data pengujian. Setelah dilakukan pencatatan hasil akurasi dan waktu pengujian, maka proses pengenalan diulangi lagi dengan menggunakan yang sampel tiap kelas data referensi yang lebih besar yaitu 2, 3, 4 sampai dengan 10. Pengujian kedua menggunakan metode DTW untuk membandingkan ekstraksi ciri A, B, C, D dan E. Gambar 4.2 menunjukkan grafik hasil
pengujian kedua, sedangkan tabel hasil pengujian kedua dapat dilihat pada lampiran C.
Dari Gambar 4, dengan menggunakan metode DTW, akurasi maksimal 99,6% diperoleh dengan menggunakan ekstraksi ciri E, sedangkan untuk waktu pengujian minimal 25.39 detik diperoleh dengan menggunakan ekstraksi ciri B. Gambar 4 (b) yang menunjukkan perbandingan waktu pengujian juga menunjukkan perbandingan panjang vektor ciri yang merupakan hasil ekstraksi ciri. Panjang vektor ciri yang paling panjang adalah vektor ciri A, sedangkan yang paling pendek adalah vektor ciri B.
7.4 Perbandingan Metode Sistem Pengenal dan Ekstraksi Ciri
Berdasarkan tabel hasil pengujian pertama dan tabel hasil pengujian kedua pada lampiran B dan lampiran C, maka untuk penggunaan sampel per kelas data referensi terbesar yaitu 10, dapat dibuat tabel perbandingan akurasi dan waktu pengujian untuk masing-masing metode dan ekstraksi ciri yang digunakan sebagaimana ditunjukkan pada Tabel 3.
Tabel 3. Perbandingan metode sistem pengenal dan ekstraksi ciri
Tabel 3 menunjukkan akurasi tertinggi 99,6% dicapai dengan menggunakan metode DTW dan ekstraksi ciri E, yang menggabungkan pendekatan statistik dan kuantisasi. Perubahan akselarasi telepak tangan yang lebih kompleks dari perubahan tekukan
jari selama gerak isyarat kata lebih tepat
menggunakan kuantisasi dari pada pendekatan statistik dengan nilai rata-rata dan simpangan baku. Karena dengan pendekatan statistik, informasi urutan perubahan akselarasi telapak tangan akan hilang.
Sedangkan waktu pengujian terkecil adalah 7,797 detik yang dicapai menggunakan metode Jarak
Euclidean dan ekstraksi ciri B. Ekstraksi ciri B
menggunakan pendekatan statistik dengan nilai rata-rata dan simpangan baku menghasilkan vektor ciri dengan panjang terpendek yaitu 16. Selain itu, waktu komputasi Jarak Euclidean lebih cepat dari metode DTW sebagaimana penjelesan sub bab sebelumnya.
Nilai akurasi 99,6% dimungkinkan untuk dicapai karena menggunakan data yang diambil dalam jangka waktu yang pendek antara data pengujian dan data referensi, yaitu dalam satu hari secara berurutan, sehingga perbedaan data gerak isyarat kata dalam satu kelas akan relatif kecil. Untuk mendapatkan ukuran kinerja sistem pengenal dengan metode DTW dan ekstraksi ciri E berdasarkan nilai akurasinya,
maka dilakukan pengujian keempat untuk
| Seminar Nasional Embedded System, Bandung 20 September 2012
8
menggunakan teknik validasi 3-fold cross validation dan dengan menambahkan 10 sampel baru untuk masing-masing kelasnya.
8. Kesimpulan dan Saran 8.1 Kesimpulan
1. Penelitian ini mengembangkan sistem
pengenalan bahasa isyarat Indonesia berbasis sensor flex dan accelerometer untuk mengenali 50 isyarat kata (kelas) SIBI (Sistem Isyarat Bahasa Indonesia).
2. Hasil akurasi optimal diperoleh dengan
menggunakan metode Dynamic Time Warping
(DTW) dengan ekstraksi ciri dengan
pendekatan statistik dan kuantisasi.
8.2 Saran
Penelitian ini merupakan tahap awal untuk
pengembangan penelitian selanjutnya. Dalam
peneltian ini masih terbatas pada penggunaaan satu tangan dalam melakukan isyarat dengan jumlah data yang digunakan masih terbatas 50 isyarat kata dan sensor yang digunakan hanya mendeteksi perubahan lekukan jari dan akselarasi telapak tangan terhadap sumbu x, y dan z. Beberapa pengembangan
penelitian tentang pengenalan bahasa isyarat
Indonesia berbasis sensor antara lain:
a. Penggunaan metode lain yang dengan akurasi tinggi, tetapi dengan waktu pengujian yang lebih cepat. Meskipun dengan metode DTW diperoleh akurasi tinggi, tetapi waktu pengujian akan semakin lama jika jumlah referensi yang digunakan semakin besar.
b. Penambahan sensor yang digunakan, yaitu
1. sensor untuk mengetahui adanya
renggangan antar jari-jari tangan
2. sensor accelerometer untuk mengetahui akselarasi lengan, yang juga bisa digunakan sebagai deteksi start dan stop yang menentukan awal dan akhir gerakan. c. Penggunaan dua tangan
d. Penggunaan jumlah data uji dan jumlah kelas yang lebih besar
e. Pemisahan isyarat kata pada rangkaian isyarat kata yang membentuk kalimat.
f. Penerapan dalam bentuk prototipe alat bantu penerjemah.
9. Daftar pustaka
[1] Ahmad Akl, Shakrokh Valaee (2010).
Accelerometer-Based Gesture Recognition via Dynamic-Time Warping, Affinity Propagation & Compressive Sensing. IEEE ICASSP.
pp2270-2273
[2] A. Piyush Shanker, A.N. Rajagopalan (2007).
Offline signature verification using DTW.
Pattern Recognition Letters 28, pp. 1407–1414 [3] Eamonn Keogh (2002). Exact indexing of
dynamic time warping. Proceedings of the 28th
VLDB Conference, Hong Kong, China
[4] Eamonn J. Keogh, Michael J. (2000). Scaling up
Dynamic Time Warping for Datamining Applications. ACM. pp.285-289
[5] Y.-H.Lee, C.-Y.Tsai, (2009), Taiwan sign
language (TSL) recognition based on 3D data and neural networks, Expert Systems with
Applications 36, pp. 1123–1128
[6] M.AL-Rousan et al., (2009), Video-based
signer-independent Arabic sign language recognition using hidden Markov models,
Applied Soft Computing 9, pp. 990–999. [7] W.Gaoetal, (2004), A Chinese sign language
recognition system based on SOFM/SRN/HMM,
Pattern Recognition 37, pp. 2389–2402
[8] C.Oz, M.C.Leu, (2007), Linguistic properties
based on American Sign Language isolated word recognition with artificial neural networks using a sensory glove and motion tracker, Neuro
computing 70, pp. 2891–2901
[9] Evita Tunjung Sekar (2001), Perancangan dan
Implementasi Prototipe Sistem Pengenalan Bahasa Isyarat. Tesis Magister ITB. Bandung.
[10] Spectra Symbol, Flex Sensor FS [11] http://www.i-chat.web.id
[12] Parallax Inc (2007), Hitachi H48C 3-Axis
Accelerometer Module (#28026) Rev 1.2
[13] Departemen Pendidikan dan Kebudayaan,
1995, Kamus Sistem Isyarat Bahasa
Indonesia.
[14] Compumine. Evaluating a classification
model – What does precision and recall tell me?,
http://www.compumine.com/web/public/new
sletter/20071/precision-recall
[15] J. Liu et al. (2009), uWave:
Accelerometer-based personalized gesture recognition and its applications, Pervasive and Mobile Computing
5, pp. 657-675
10. Daftar Pertanyaan
1. Penanya: Oka Mahendra (LIPI)
Pertanyaan: Penjelasan mengenai aplikasi dan manfaat penelitian dalam kehidupan?
Jawaban: aplikasi umum pengenalan
gerak adalah untuk mendapatkan ekstraksi ciri yang tepat yang bisa diterapkan pada perangkat pengenalan gerak.
Pertanyaan: Apakah memungkinkan ada
pengenalan pola?
Jawaban: pengenalan isyarat merupakan
pengenalan pola, pengenalan isyarat dapat dilakukan pada data video selain dengan
menggunakan sensor, tetapi proses
pengenalannya lebih sulit melalui
pemrosesan citra, terutama pada kendala oklusi (occlusion)
| Seminar Nasional Embedded Systems, Bandung 20 September 2012 9
Implementasi ATMega 128 Pada Reaktor Biodiesel Oil
Mila Fauziyah1), Denda Dewatama2), Zakiyah Irfin3)
Teknik Elektronika1,2) , Teknik Kimia3) Politeknik Negeri Malang
[email protected]), [email protected]), [email protected])
Abstract
Petroleum is an energy source that can not be renewed. It is encouraging to do the studies that produce substitute energy, one biodiesel, energy to fuel diesel engines from vegetable materials, in this study using used cooking oil. On the other hand the study was undertaken to utilize the food industry waste when disposed of directly into nature will cause pollution. The purpose of this study was to establish a reactor that works automatically used ATMega 128 and continue in the process of esterification and trans esterification on the production of biodiesel made from used cooking oil. Total time the overall process for 6 hours 20 minutes and total time the overall continue process for 9 hours and 40 minutes with the results of testing this biodiesel has 40.936 cst viscosity, specific gravity 0.86 g / mL and flash point 162 0C.
Keywords: biodiesel esterification, microcontroller
Abstrak
Minyak bumi merupakan sumber energi yang tidak dapat diperbaharui. Hal ini mendorong untuk dilakukan penelitian-penelitian yang menghasilkan energi pengganti, salah satunya biodiesel, energi untuk bahan bakar mesin diesel dari bahan-bahan nabati, dalam hal penelitian ini menggunakan minyak jelantah. Di sisi lain penelitian ini dilakukan untuk memanfaatkan limbah industri makanan yang apabila dibuang secara langsung ke alam akan menimbulkan polusi. Tujuan penelitian ini adalah untuk membentuk reaktor yang bekerja secara otomatis dengan memanfaatkan ATMega 128 dan kontinyu dalam proses esterifikasi dan trans esterifikasi pada produksi biodiesel oil berbahan baku minyak jelantah. Total waktu satu proses keseluruhan selama 6 jam 20 menit dan untuk melakukan proses kontinyu dibutuhkan Total waktu dua kali proses keseluruhan selama 9 jam 40 menit. Biodiesel Oil yang dihasilkan ini memiliki viscositas 40,936 Cst, berat jenis 0,86 gr/mL dan flash point 162 0C.
Kata kunci: esterifikasi biodiesel, mikrokontroller
1. Pendahuluan
Minyak diesel atau solar adalah salah satu produk minyak bumi yang digunakan sebagai bahan bakar mesin, yaitu mesin diesel. Bahan bakar diesel merupakan fraksi minyak bumi yang mendidih antara 300°C-700°C dan digunakan sebagai bahan bakar mesin diesel. padahal minyak diesel sebagai produk minyak bumi yang merupakan sumber daya yang tak terbaharukan (unrenewiable).
Seiring dengan menipisnya cadangan minyak bumi, perlu dicari alternatif baru untuk diversifikasikan energi di masa depan. Banyak peneliti telah menguji kemungkinan-kemungkinan penggunaan minyak nabati sebagai pengganti bahan bakar baik secara langsung maupun sebagai bahan pencampur.
Suirta melakukan penelitian dengan bahan minyak jelantah kelapa sawit yang hasilnya memenuhi syarat seperti yang ditetapkan oleh standar Jerman DIN 51606. Kemudian perusahaan NANKO di Jepang membuat mesin diesel pembangkit listrik dengan bahan bakar dari minyak goreng jelantah yang telah disaring dan kemudian ditambah methanol. Supranto dkk meneliti tentang pengaruh suhu dan perbandingan pereaksi pada pembuatan methyl ester biodiesel dari distilat asam lemak sawit [7]. Djaeni dkk meneliti tentang penggunaan minyak goreng bekas menjadi biodiesel dengan cara
transesterifikasi. Hasil penelitiannya menunjukkan bahwa zeolite yang telah diaktivasi dengan asam sulfat mempunyai kemampuan sebagai katalis dalam proses transesterifikasi minyak nabati bekas menjadi biodiesel [4]. Tahun 2004 Bismo meneliti prospek ozonosasi etil ester dari minyak nabati untuk bahan bakar mesin diesel [2]. Penelitian ini menyimpulkan bahwa reaksi ozonisasi dapat mengubah sifat – sifat dan atau karakteristik dari ester yang berasal dari minyak – minyak nabati seperti kelapa sawit, minyak sawit, minyak kedelai dan minyak bunga matahari.
Di Indonesia, proses produksi biodiesel belum dilakukan secara massal dan masih dilakukan secara manual, seperti yang dilakukan [6] yang mendesain alat biodiesel dengan kapasitas 15 liter/hari secara manual. Untuk mengoperasikan alat tersebut masih dibutukan tenaga operator yang ahli, sehingga membuka peluang terjadinya kesalahan karena faktor human error, hal ini akan mempengaruhi hasil produksi. Oleh karena hal-tersebut, dan karena kemajuan teknologi khususnya dalam ilmu elektronika semakin cepat, maka perlu adanya usaha untuk menggabungkan kemajuan teknologi elektronika dengan kemajuan ilmu kimia, untuk membentuk sistem otomatisasi. Dalam penelitian ini akan didesain sebuah sistem otomatisasi untuk memanfaatkan limbah minyak goreng sebagai bahan awal pembuatan biodiesel dengan sistem esterifikasi pada rancang bangun alat biodiesel.
| Seminar Nasional Embedded Systems, Bandung 20 September 2012
10
2. Metode 2.1 Biodiesel
Dalam membuat biodiesel sehingga dapat
digunakan sebagai bahan bakar harus memenuhi parameter minyak diesel atau IDO (Industrial Diesel oil) seperti dalam Tabel 1.
Tabel 1. Karakteristik bahan bakar diesel
No. Karakteristik Minyak Solar* IDO
1 Sp.gr 60/60 F 0,820-0,87 0,84-0,92 2 Density,gr/ml ** 0,80-0,86 0.83-0,90
3 Kin.visco 100.F,Cs 1,6-5,8 35-45 4 Flash point oC Min.65 Min.65
*)Keputusan Direktur Jendral Minyak dan Gas bumi No. 004/DM/Migas/1979
**) density = berat jenis
2.2 Esterifikasi dan Transesterifikasi
Proses esterefikasi adalah proses awal untuk
pembuatan biodiesel. Yang berfungsi untuk
menghilangakan gumming (getah) pada bahan baku, serta untuk mereaksikan dengan metanol yang akan mengahasilkan metil ester dan H2O. Sepeti pada proses kimia dalam Gambar 2.3:
0 0
II II
R- C-OH + CH3OH→R- C-OCH3 + H2 O
Asam lemak metanol ← metil ester asam lemak air ↑
Katalis asam
Gambar 1. Reaksi Esterifikasi Asam Lemak Bebas menjadi Metil Ester dengan Katalis Asam [9]
Untuk memperoleh spesifikasi minyak jelantah yang asli, minyak jelantah yang kasar harus dimurnikan terlebih dahulu. Proses pemurnian ini terjadi pada sistem esterifikasi, yang mana bertujuan untuk menghilangkan bau yang tidak enak, mencegah timbulnya warna yang kurang menarik, serta memperpanjang masa simpan biodiesel sebelum diogunakan. Selain itu pemurnian yang terjadi pada system esterfikasi bertujuan untuk menghilangkan senyawa pengotor dalam minyak jelantah. Senyawa pengotor ini dapat menyebabkan kualitas biodiesel rendah yang berimplikasi pada kerusakan mesin.
Proses Transesterifikasi adalah proses lanjutan dari proses esterifikasi untuk pembuaatan biodiesel yang berfungsi untuk menghilangkan gliserol pada bahan baku, serta untuk mereaksikan dengan metanol yang
akan menghasilkan metil ester dan H2O. Proses
transesterifikasi ini dibagi menjadi mejadi 2 tahap yakni proses pemisahan gliserol dan pemisahan asam lemak bebas. Degliserolisasi dilakukan dengan menambah metanol dan NaOH kedalam crude methyl ester asam lemak lalu memanaskanya hingga membentuk senyawa fosfolipit yang lebih muda terpisah dari minyak, yang menghasilkan gliserol dan crude methyl ester asam lemak.
Gambar 2. Reaksi Transesterifikasi Trigliserida Menjadi Metil Ester Dengan Katalis Basa [9]
2.3 Perancangan 2.3.1 Blok Diagram
Dalam melakukan proses perancangan rangkaian elektronik terlebih dahulu kita membuat blok diagram dari perancangan tersebut, seperti dalam Gambar 3.
Sensor Suhu Sensor level Sensor Jenis Cairan RTC Kran/Valve Cairan Motor Pengaduk LCD Heater Atmega 128 Sensor Suhu Sensor level Sensor Jenis Cairan Esterifikasi Kran/Valve Cairan Motor Pengaduk Heater Trans Esterifikasi Esterifikasi Trans Esterifikasi
Gambar 3. Blok Diagram Rangkaian
Keterangan:
a. Sensor Suhu, Sensor suhu yang digunakan adalah LM35.
b. Sensor Jenis Cairan, Sensor yang digunakan untuk membedakan cairan adalah optocoupler.
c. Sensor Level, Untuk aplikasi level, yang digunakan adalah elektroda yang berupa kawat tembaga. d. RTC, Real Time Clock (RTC) yang digunakan
adalah DS1307.
e. Sensor Buka Tutup Kran, Sensor yang digunakan sebagai pembatas buka dan tutup kran adalah limit
switch.
f. Mikrokontroler, berfungsi sebagai pengendali dari
semua sistem.
g. LCD, untuk menampilkan proses pada sistem, digunakan LCD. LCD yang digunakan adalah LCD 16 x 2.
h. Motor, ada dua jenis motor yang digunakan yaitu
motor pembuka, penutup kran (4 Watt) dan motor pengaduk (75 Watt).
i. Valve, digunakan untuk mengatrur pengisian cairan
dalam tabung reaksi.
j. Heater, berfungsi sebagai pemanas dengan daya
| Seminar Nasional Embedded Systems, Bandung 20 September 2012 11
2.3.2 Perancangan Sensor Level
Pada rangkaian level yang terdapat pada setiap tabung cairan, yang digunakan adalah elektroda yang berasal dari bahan tembaga, karena tembaga merupakan penghantar yang baik dan tidak terkorosi oleh bahan kimia pada proses esterifikasi dan transesterifikasi.
2.3.3 Sensor Jenis Cairan
Untuk membedakan antara kotoran hasil
pengendapan atau sisa pencucian dengan hasil proses maka digunakan sensor cahaya berupa optocoupler dengan rangkaian seperti pada Gambar 4.
Gambar 4. Rangkaian Sensor Jenis Cairan
2.3.4 Real Time Clock
Karena membutuhkan proses berjam – jam dalam satu kali siklus, maka digunakan real time clock (RTC) agar timer sesuai dengan waktu yang sesungguhnya. Selain itu, apabila menggunakan timer pada Atmega128, jika waktu yang diatur dalam orde jam, kemungkinan besar kontroler akan error. Dimana RTC yang dipilih yaitu DS1307 dengan rangkaian seperti ditunjukkan dalam Gambar 5.
Gambar 5. Rangkaian RTC
2.3.5 Mikrokontroler ATMega 128
ATMega 128 berfungsi sebagai pengendali dari sistem reaktor biodiesel, adapun fitur dari ATMega 128 sebagai berikut:
a. 128 Kb Flash PEROM b. 4Kb EEPROM c. 8 Channel 10 bit ADC d. 2 buah 8 bit PWM
e. Programmable watchdog dan on chip oscillator
f. 53 bit I/O
2.3.6 Perancangan Driver Relay
Semua motor yang digunakan adalah motor AC, termasuk valve juga AC. Driver relay yang digunakan hanya berupa driver On/Off, jadi dipakai relay. Selain
relay, juga digunakan komponen berupa optoisolator
dan juga BD139. Adapun agar lebih jelas lagi, dapat dilihat pada Gambar 6.
Gambar 6. Rangkaian Driver Relay
2.3.7 Perancangan Perangkat Lunak
Pembuatan program dilakukan dengan
menggunakan Bascom AVR, dengan mengacu pada flow chart dalam Gambar 7.
Gambar 7. Diagram Alir Perangkat Lunak
3. Hasil
3.1 Pengujian Bahan
Untuk mengetahui apakah alat yang dibuat dapat menghasilkan biodiesel sesuai dengan perancangan maka setelah sistem dapat berjalan baik di tiap bagiannya dilakukan pengujian secara keseluruhan dengan memasukkan bahan dasar berupa minyak jelantah dan minyak curah. Sedang untuk mengetahui karakteristik dari biodiesel yang dihasilkan oleh alat konversi ini, dilakukan proses pengujian bahan. Pengujian ini dilakukan di laboratorium kimia Politeknik Negeri Malang yang meliputi pengujian metal ester, viscositas, berat jenis dan juga flash point, hasil pengujian dapat dilihat dalam Tabel 2. Sebagai perbandingan digunakan tabel karaktersitik minyak diesel yang dikeluarkan oleh IDO seperti Tabel 1.
5 V R 56 R 100 K Optocoupler Port X1 1 X2 2 VBAT 3 GND 4 SDA 5 SCL 6 SQW/OUT 7 VCC 8 DS1307 5 V 3 V Battery Cap. j am 1 K 1 K Port Port BD139_2 R2 220 1K8 R3 4n25 OPTOISO1 12V 12V 1A D IO D E 12V Motor_AC AC BD139_1 NO R1 2,2 K Port K? RELAY
| Seminar Nasional Embedded Systems, Bandung 20 September 2012
12
Tabel 2. Hasil Uji Bahan
No. Jenis
Contoh Parameter Uji Hasil
1. Minyak
Curah
Metil Ester Terlampir
Viscositas 13,62 cst
Berat Jenis 0,82 gr/mL
Flash Point 132 C
2. Minyak
Jelantah
Metil Ester Terlampir
Viscositas 40,94 cst
Berat Jenis 0,862 gr/mL
Flash Point 162 C
Apabila dari Tabel 2 dengan Tabel 1 dibandingkan maka diperoleh kesimpulan bahwa biodiesel yang dihasilkan oleh reaktor ini telah sesuai dengan spesifikasi dari Keputusan Direktur Jenderal Minyak dan Gas Bumi (Tabel 1).
3.2 Pengujian Waktu Proses Esterifikasi
Pengujian waktu proses esterifikasi dan
transesterifikasi dapat dilihat dalam Tabel 4 di bawah ini, dengan total satu kali proses 6 jam 20 menit, sementara jika dilakukan secara kontinyu untuk dua kali proses produksi diperlukan total waktu 9 jam 40 menit.
Tabel 3. Waktu Proses Esterifikasi dan Transesterifikasi
Proses Waktu
Pemanasan Minyak Jelantah 8-10menit Pemanasan Minyak Jelantah dan
Pengadukan Larutan H3PO4 40 menit Pengendapan Gumming 2 jam Pengadukan Metanol 30 menit Pengeluaran hasil alkoholisasi
(Esterifikasi) 5 menit Pemanasan dan pengadukan larutan
dengan methanol + NaOH 1 jam Pengendapan Gliserol 10 menit Pembuangan Gliserol 10 menit Pencucian dengan air 10 menit Pengendapan 10 menit Distilasi 1jam Pengeluaran hasil 5 menit
4. Kesimpulan
Berdasarkan hasil percobaan dan analisa yang diperoleh dari Implementasi Kontroller Dalam Proses Esterifikasi Pada Rancang Bangun Biodiesel ini dapat ditarik kesimpulan sebagai berikut:
1. Dalam proses esterifikasi membutuhkan waktu 3 jam 40 menit.
2. Dalam proses transesterifikasi membutuhkan waktu 2 jam 40 menit.
3. Biodiesel ini memiliki viscositas 40,936 Cst, berat
jenis 0,86 gr/mL dan juga flash point 162 0C.
5. Daftar Pustaka
[1]. Anggraini, A.A. 2001. ”Prospect of Vegetable Oil
for Technical Utilization in Indonesia”.
International Biodiesel Workshop. Medan. [2]. Bismo, S., 2004, ”Prospek Ozonisasi Etil Ester
dari Beberapa Minyak Nabati untuk Bahan Bakar Mesin Diesel”, Prosiding Seminar Nasional
Rekayasa Kimia dan Proses Teknik Kimia, ISSN
1411-4216.
[3]. Cooper, William David. 1985. Instrumentasi Elektronik dan Teknik Pengukuran. Jakarta : Erlangga
[4]. Djaeni, M., Suherman, Robyansah dan
Hermawan H., 2004, ”Transesterifikasi Minyak Nabati Bekas Menjadi Biodiesel Menggunakan Katalis Zeolite”, Prosiding Seminar Nasional
Kejuangan Teknik Kimia, ISSN 1693-4393, UPN
”Veteran”. Yogyakarta.
[5]. Malvino, Albert Paul. 1987. Prinsip-Prinsip Elektronika Edisi Kedua. Terjemahan:Hanafi Gunawan. Jakarta : Erlangga.
[6]. Suharyono. 2007. “Perencanaan Sistem
Esterifikasi pada Rancang Bangun ALat
Biodiesel dengan Kapasitas 15 Liter/Hari. Universitas Negeri Surabaya. Tugas Akhir.
[7]. Supranto, Suhardi dan Purnomo, 2003,
“Rancangan Proses Produksi Biodiesel Bahan Bakar Mesin Diesel dari Limbah Proses Pengolahan Minyak Goreng Berbasis Crude Palm Oil”, ProsidingSeminar Nasional Rekayasa
Kimia dan Proses Teknik Kimia, ISSN
1411-4216, Uneversitas Diponegoro Semarang. [8]. Widayat, Luqman Buchori. 2009. “Pembuatan
Biodiesel dari Minyak Goreng Bekas dengan Proses Catalytic Cracking. Prosiding Seminar
Nasional Teknik Kimiua Indonesia. ISBN
978-979-98300-1-2 Universitas Diponegoro
Semarang.
[9].
http://chemical-engineer.digitalzones.com/biodiesel.html,
diunduh tanggal 27 Desember 2011.
6. Daftar Pertanyaan
1. Penanya: Panuksma Wiku Hendro
(Indomaret)
Pertanyaan: Apa kelebihan ATMega ver.
128 dan berapa pin?
Jawaban: jumlah pinnya sedikit cukup 1
Pertanyaan: Perbedaan speed? Jawaban: tidak ada
2. Penanya:Benny (PT CSL)
Pertanyaan: Sensornya apa saja? Jawaban: suhu, level, jenis cairan
| Seminar Nasional Embedded Systems, Bandung 20 September 2012 13
Otomasi Mesin Pemotong Kayu Berbasis PLD Menggunakan VHDL
Supriatna Adhisuwignjo1), Ratna Ika Putri2), Sungkono3)
Prodi Teknik Elektronika Politeknik Negeri Malang
[email protected]), [email protected]), [email protected])
Abstract
There are many small wood industry that still use manual wood cut machine so it need long time process and produce an unaccurate product. So, it need to make an automation wood cut machine in order to the process can be more fast and the product become better and more accurate. The purpose of this ressearch is to design automation of wood cut machine using PLD (Programmable Logic Device) as controller and apply programming language VHDL (VHSIC Hardware Description Language) so the circuit become more simple and brief. The research step consist of investigate literature, mechanic design, hardware design include design of IC PAL CE22V10 controller, measurement sensor using infrared, design buzzsaw moving sensor using limit switch and design driver DC motor for conveyor, buzzsaw and side clamping. After that, design software using VHDL. From the result of simulation using ACTIVE HDL-Sim and the system test can be stated that system can work well appropriate with planning.
Keywords: VHDL, PLD, Otomation, Wood Cut Machine.
Abstrak
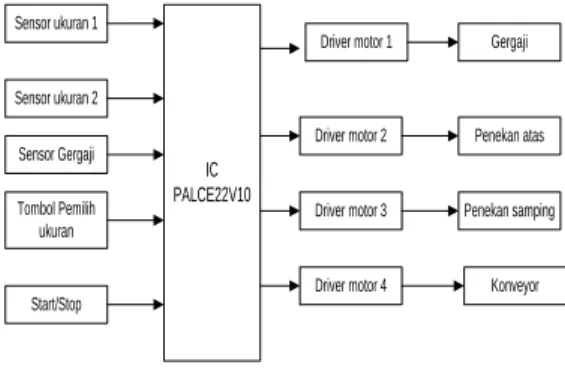
Banyak industri perkayuan usaha kecil yang masih menggunakan mesin pemotong manual yang prosesnya membutuhkan waktu lama dan sering hasilnya kurang akurat. Untuk itu diperlukan otomasi mesin pemotong kayu sehingga prosesnya bisa lebih cepat dan hasilnya bisa lebih baik dan akurat. Tujuan penelitian ini adalah untuk merancang otomasi mesin pemotong kayu dengan menggunakan PLD (Programmable Logic Device) sebagai pengontrol serta dengan mengaplikasikan bahasa pemrograman VHDL (VHSIC Hardware Description Language) sehingga rangkaian dapat dibuat lebih sederhana dan ringkas. Langkah penelitian meliputi studi pustaka, perencanaan mekanik, pembuatan perangkat keras yang meliputi pembuatan pengontrol menggunakan IC PAL CE22V10, membuat sensor ukuran menggunakan sensor infra merah, membuat sensor gerak gergaji yang menggunakan limit switch dan membuat rangkaian penggerak motor DC untuk konveyor, penggerak gergaji dan penjepit samping. Setelah itu dilanjutkan dengan merencanakan perangkat lunak menggunakan VHDL. Dari hasil simulasi dengan menggunakan ACTIVE HDL-Sim dan pengujian sistem otomasi diperoleh hasil bahwa sistem telah bekerja sesuai dengan yang direncanakan.
Kata kunci: VHDL, PLD, Otomasi, Mesin Pemotong Kayu.
1. Pendahuluan
Di Indonesia, kayu merupakan sumber daya hasil hutan yang banyak diminati dan dikelola oleh pengusaha besar maupun usaha kecil menengah dalam bentuk industri kayu lapis, industri penggergajian, industri
moulding dan bahan bangunan serta industri mebel.
Industri kayu olahan umumnya dikelola oleh usaha kecil menengah dengan proses produksi dan teknologi yang sederhana. Usaha kecil menengah perkayuan ini mempunyai prospek jangka panjang karena produk mereka selalu dibutuhkan oleh masyarakat luas dan
bahan bakunya bisa diperbaharui. Sehingga
pengembangan industri pengolahan kayu dapat
diarahkan kepada industri yang memiliki nilai tambah yang tinggi serta tingkat teknologinya telah dikuasai dengan baik.
Dengan dukungan teknologi selama proses
pengolahan, diharapkan akan terjadi peningkatan kualitas produk sesuai dengan permintaan dan harapan pelanggan. Salah satu elemen penting dalam proses pengolahan kayu di industri perkayuan usaha kecil menengah adalah proses pemotongan kayu. Banyak industri penggergajian dan industri kerajinan perkayuan usaha kecil menengah yang masih menggunakan mesin pemotong manual yang prosesnya membutuhkan waktu lama dan sering hasilnya kurang akurat. Untuk itu
diperlukan otomasi mesin pemotong kayu sehingga proses pengerjaannya bisa lebih cepat dan hasilnya bisa lebih baik dan akurat dengan ukuran panjang kayu yang dapat disetting sesuai dengan kebutuhan. Dalam hal ini teknologi yang digunakan untuk otomasi dengan menggunakan rangkaian terintegrasi Programmable
Logic Device (PLD). Aplikasi maksimum dari
komponen-komponen LSI (Large Scale integration), VLSI (Very Large Scale integration)dan MSI pada perancangan sistem mikroprosessor (microprosessor
system design), memungkinkan biaya lebih rendah dan
dengan keandalan yang lebih tinggi. Akan tetapi pada perancangan rangkaian logika acak (random Logic
Design) selalu diperlukan penggabungan dari beberapa
komponen VLSI, MSI dan LSI. PLD merupakan salah satu cara untuk membentuk fungsi-fungsi logika yang kompleks. PLD dapat digunakan untuk beberapa logika pemrograman hanya dengan menggunakan satu IC [1].
Untuk mengimplementasi logika pemrogram ke dalam PLD dibutuhkan Teknologi VHSIC HDL (Very
High Speed Integrated Circuit Hardware Description Language) disingkat VHDL yang digunakan sebagai
pengolah data pada alat ini karena merupakan bahasa perangkat keras yang menyediakan format yang lengkap dan dapat mempresentasikan fungsi secara detail, serta dapat digunakan untuk suatu simulasi, perencanaan, pemodelan test dan dokumentasi dari suatu system.

![Gambar 1. Reaksi Esterifikasi Asam Lemak Bebas menjadi Metil Ester dengan Katalis Asam [9]](https://thumb-ap.123doks.com/thumbv2/123dok/4341927.3175603/18.893.229.770.97.678/gambar-reaksi-esterifikasi-lemak-bebas-menjadi-metil-katalis.webp)



![diagram UML statechart sebagai input [3]. Penelitian ini memanfaatkan sebuah open source Enclipse universal tool untuk pembuatan diagram UML statechart](https://thumb-ap.123doks.com/thumbv2/123dok/4341927.3175603/38.893.465.812.84.450/diagram-statechart-penelitian-memanfaatkan-enclipse-universal-pembuatan-statechart.webp)