D-126
Implementasi Metode Anfis untuk Menghindari
Dynamic Obstacle
di Area Koridor pada
Three Wheels Omni-Directional Mobile Robot
Wahyu Setyo Pambudi, ST., MT 1) Ir. Djoko Purwanto, M.Eng., Ph.D 2)
Dr. Tri Arief Sardjono, ST., MT 2)
Jurusan Teknik Elektro Fakultas Teknologi Industri Universitas Internasional Batam 1) Jurusan Teknik Elektro Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember 2)
E-mail : [email protected] , [email protected] Abstrak
Penelitian mobile robot banyak dilakukan, salah satunya robot penghindar halangan. Sistem kendali robot ini menggunakan pendekatan pengetahuan dan pengalaman salah satunya adalah Adaptive Neuro Fuzzy Inference System (ANFIS). Pengujian robot dengan menggunakan ANFIS ini sebagian besar halangan bersifat statis, sehingga sulit untuk diimplementasikan dalam kondisi yang sebenarnya, dimana halangan bisa bersifat dinamis. Halangan dinamis (dynamic obstacle) dapat diakibatkan karena adanya obyek yang bergerak salah satunya pejalan kaki. Proses menghindari pejalan kaki diperlukan kemampuan robot yang smooth dan effisien dalam bergerak. Hal itu dapat dicapai apabila model steering menggunakan roda omni-directional. Penelitian ini difokuskan untuk menghindari dynamic obstacle berupa pejalan kaki menggunakan 3 wheels omni-directional mobile robot. Informasi visual yang diterima, digunakan untuk menentukan estimasi jarak, kecepatan dan posisi. Sistem kendali menggunakan ANFIS offline learning untuk merubah jalur robot. Hasil pengujian sebanyak 10 kali dengan 3 posisi obyek yang berbeda didapatkan tingkat keberhasilan robot menghindari obyek sebesar 80%.
Kata Kunci : mobile robot, ANFIS, dynamic obstacle, 3 wheels omni-directional
1. Pendahuluan
Penelitian tentang robot Obstacle Avoidance ini banyak difokuskan pada sistem kendalinya. Sistem ini digunakan untuk mengendalikan robot agar dapat menghindari benturan dengan halangan yang terdapat pada lingkungan tempat robot berjalan. Agar robot mempunyai kemampuan untuk memberikan reaksi terhadap ketidakpastian (uncertainty) kondisi lingkungan sekitarnya maka kemampuan sistem kendali harus ditingkatkan. Salah satu caranya dengan menggabungkan antara Fuzzy Logic Control (FLC) dengan Neural Network (NN). FLC mempunyai kemampuan penyelesaian masalah sistem kendali dengan pendekatan pengetahuan dan secara cepat dapat diterapkan, sedangkan NN mempunyai kemampuan mengidentifikasi permasalahan melalui model pembelajaran secara mandiri maupun dibimbing. Penggabungan dua metode menjadi FNN (Fuzzy Neural
Network) yang diterapkan pada robot, mengakibatkan
permasalahan ketidak pastian lingkungan bisa diatasi [1]. Penelitian ini hanya mengatasi masalah lingkungan tempat berjalan robot yang belum diketahui, sedangkan unsur gangguan dinamis yang diakibatkan oleh dynamic
obstacle masih belum dimasukkan.
Guna lebih meningkatkan kemampuan mobile robot, metode ANFIS (Adaptive Neuro-Fuzzy Inference
System) juga digunakan sebagai sistem kendalinya.
Penelitian ini melakukan simulasi dan pengujian robot
obstacle avoidance dengan menggunakan software Rossum’s Playhouse simulation. Hasil dari simulasi
dimasukkan ke algoritma pemrograman robot. Pengujian robot dilakukan pada lingkungan yang telah ditentukan (arena tempat pengujian robot) dimana ada 4 macam bentuk lingkungan [2]. Selain menggunakan simulasi, implementasi ANFIS mampu digunakan sebagai robot pelayan yang dapat bernavigasi serta mendeteksi wajah tamu dengan menggunakan vision sensor [3]. Robot-robot yang digunakan dalam simulasi dan impelentasi ini menggunakan penggerak differensial motor dengan 1 roda bebas. Penggunaan differensial motor dengan 1 roda bebas memiliki keterbatasan dalam menghindari halangan yang bersifat dinamis. Steering method (metode steering) ini memerlukan lintasan yang lebar untuk melakukan manuver serta menghindari halangan, berbeda dengan
omni-directional wheels yang hanya memerlukan
lintasan kecil pada saat berjalan pada area koridor [4].
Berdasarkan hal tersebut maka dalam penelitian ini akan dikembangkan sebuah three wheels omni-directional
mobile robot yang dapat bernavigasi secara mandiri
untuk mengatasi dynamic obstacle pada lingkungan tempat robot tersebut berjalan. Model lingkungan difokuskan pada area koridor sedangkan bentuk
dynamic obstacle adalah pejalan kaki. Sensor vision
yang memberikan informasi visual, digunakan untuk mendeteksi dan mengidentifikasi parameter jarak, posisi dan kecepatan pejalan kaki. Metode untuk mengenali pejalan kaki menggunakan segmentasi warna model HSV [5]. Pendekatan sistem kendali robot yang digunakan untuk dapat menghindari halangan berupa pejalan kaki di area koridor adalah ANFIS (Adaptive
Neuro Fuzzy Inference System), dimana memiliki
keunggulan mampu menyelesaikan masalah dengan pendekatan pengetahuan dan pengalaman [6]. Selain itu ANFIS juga dapat melakukan proses dari beberapa masukan dengan sebuah keluaran, dimana antara masukan dan keluaran mempunyai besaran yang berbeda [3].
Alasan penggunaan three wheels omni-directional pada penelitian ini, diharapankan bahwa mobile robot mampu mengatasi masalah dynamic obstacle secara smooth (halus) dan fleksibel serta terbebas dari benturan. Meskipun 3 roda omni-directional memiliki akselerasinya lebih kecil dibandingkan 4 roda, tetapi
speed maksimumnya sama yaitu sebesar 2m/s [7] [8].
Dalam penelitian ini lebih ditekankan pada kemampuan melakukan pergerakan menghindari dynamic obstacle pada area koridor. Hasil penelitian diharapkan dapat memberikan konsep dasar implementasi robot pada area koridor dan dapat menghindari halangan dinamis.
2. Metodologi Penelitian. 2.1. Perancangan Sistem
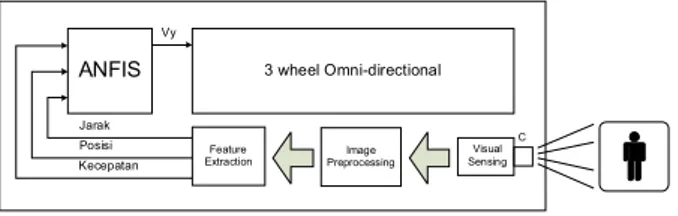
Sistem terdiri atas 3 bagian utama yaitu sensor vision berupa webcam, laptop dan Robotino. Sensor vision disini berfungsi untuk mengirimkan informasi secara visual ke Laptop, yang kemudian informasi tersebut akan diolah.
Hasil pengolahan informasi visual tersebut adalah berupa estimasi jarak obyek dan arah gerak. Kedua parameter ini digunakan sebagai input pada proses kendali ANFIS nantinya. Output proses kendali ANFIS akan dikirimkan ke Robotino. Kecepatan putaran motor diatur dengan mengirimkan data kecepatan ke Robotino. Perubahan pergerakan Robotino tergantung informasi yang diterima dari sensor vision.
3 wheel Omni-directional Image Preprocessing Feature Extraction ANFIS Vy Jarak Posisi Kecepatan C Visual Sensing
Gambar 1. Blok sistem.
Pengolahan image dari sensor vision ini menggunakan model segmentasi HSV. Hasil segmentsi akan menghasilkan deteksi terhadap obyek yang telah ditentukan dan kemudian diukur tinggi dari luas obyek diterima. Tinggi dari hasil perhitungan ini akan digunakan sebagai representasi dari estimasi jarak [9].
2.2. Adaptive Neuro Fuzzy Inference System
(ANFIS )
2.2.1. Pembelajaran ANFIS
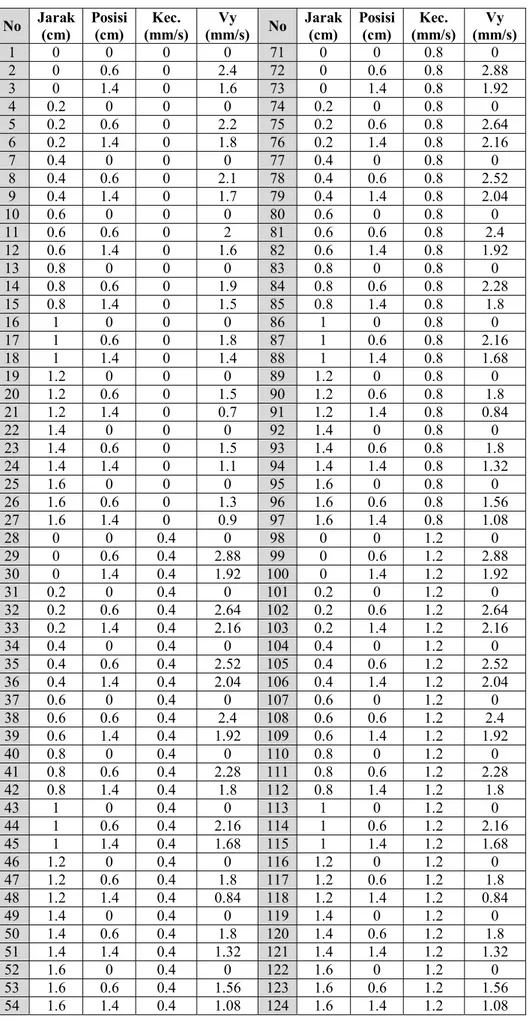
Pembelajaran atau learning perlu dilakukan untuk mencapai hasil yang optimum pada sistem kendali menggunakan ANFIS. Model pembelajaran ANFIS ada dua yaitu offline dan online learning. Model pembelajaran yang digunakan untuk model pertama pada penelitian ini menggunakan offline learning, dimana data akan dilatihkan dengan MATLAB sampai pada error minimum. Berdasarkan data tabel 1 maka hasil pelatihan tersebut, dengan menggunakan 3 buah
membership function (MBF) dan parameter consequent
Tabel 1. Data pembelajaran ANFIS No Jarak (cm) Posisi (cm) Kec. (mm/s) Vy (mm/s) No Jarak (cm) Posisi (cm) Kec. (mm/s) Vy (mm/s) 1 0 0 0 0 71 0 0 0.8 0 2 0 0.6 0 2.4 72 0 0.6 0.8 2.88 3 0 1.4 0 1.6 73 0 1.4 0.8 1.92 4 0.2 0 0 0 74 0.2 0 0.8 0 5 0.2 0.6 0 2.2 75 0.2 0.6 0.8 2.64 6 0.2 1.4 0 1.8 76 0.2 1.4 0.8 2.16 7 0.4 0 0 0 77 0.4 0 0.8 0 8 0.4 0.6 0 2.1 78 0.4 0.6 0.8 2.52 9 0.4 1.4 0 1.7 79 0.4 1.4 0.8 2.04 10 0.6 0 0 0 80 0.6 0 0.8 0 11 0.6 0.6 0 2 81 0.6 0.6 0.8 2.4 12 0.6 1.4 0 1.6 82 0.6 1.4 0.8 1.92 13 0.8 0 0 0 83 0.8 0 0.8 0 14 0.8 0.6 0 1.9 84 0.8 0.6 0.8 2.28 15 0.8 1.4 0 1.5 85 0.8 1.4 0.8 1.8 16 1 0 0 0 86 1 0 0.8 0 17 1 0.6 0 1.8 87 1 0.6 0.8 2.16 18 1 1.4 0 1.4 88 1 1.4 0.8 1.68 19 1.2 0 0 0 89 1.2 0 0.8 0 20 1.2 0.6 0 1.5 90 1.2 0.6 0.8 1.8 21 1.2 1.4 0 0.7 91 1.2 1.4 0.8 0.84 22 1.4 0 0 0 92 1.4 0 0.8 0 23 1.4 0.6 0 1.5 93 1.4 0.6 0.8 1.8 24 1.4 1.4 0 1.1 94 1.4 1.4 0.8 1.32 25 1.6 0 0 0 95 1.6 0 0.8 0 26 1.6 0.6 0 1.3 96 1.6 0.6 0.8 1.56 27 1.6 1.4 0 0.9 97 1.6 1.4 0.8 1.08 28 0 0 0.4 0 98 0 0 1.2 0 29 0 0.6 0.4 2.88 99 0 0.6 1.2 2.88 30 0 1.4 0.4 1.92 100 0 1.4 1.2 1.92 31 0.2 0 0.4 0 101 0.2 0 1.2 0 32 0.2 0.6 0.4 2.64 102 0.2 0.6 1.2 2.64 33 0.2 1.4 0.4 2.16 103 0.2 1.4 1.2 2.16 34 0.4 0 0.4 0 104 0.4 0 1.2 0 35 0.4 0.6 0.4 2.52 105 0.4 0.6 1.2 2.52 36 0.4 1.4 0.4 2.04 106 0.4 1.4 1.2 2.04 37 0.6 0 0.4 0 107 0.6 0 1.2 0 38 0.6 0.6 0.4 2.4 108 0.6 0.6 1.2 2.4 39 0.6 1.4 0.4 1.92 109 0.6 1.4 1.2 1.92 40 0.8 0 0.4 0 110 0.8 0 1.2 0 41 0.8 0.6 0.4 2.28 111 0.8 0.6 1.2 2.28 42 0.8 1.4 0.4 1.8 112 0.8 1.4 1.2 1.8 43 1 0 0.4 0 113 1 0 1.2 0 44 1 0.6 0.4 2.16 114 1 0.6 1.2 2.16 45 1 1.4 0.4 1.68 115 1 1.4 1.2 1.68 46 1.2 0 0.4 0 116 1.2 0 1.2 0 47 1.2 0.6 0.4 1.8 117 1.2 0.6 1.2 1.8 48 1.2 1.4 0.4 0.84 118 1.2 1.4 1.2 0.84 49 1.4 0 0.4 0 119 1.4 0 1.2 0 50 1.4 0.6 0.4 1.8 120 1.4 0.6 1.2 1.8 51 1.4 1.4 0.4 1.32 121 1.4 1.4 1.2 1.32 52 1.6 0 0.4 0 122 1.6 0 1.2 0 53 1.6 0.6 0.4 1.56 123 1.6 0.6 1.2 1.56 54 1.6 1.4 0.4 1.08 124 1.6 1.4 1.2 1.08
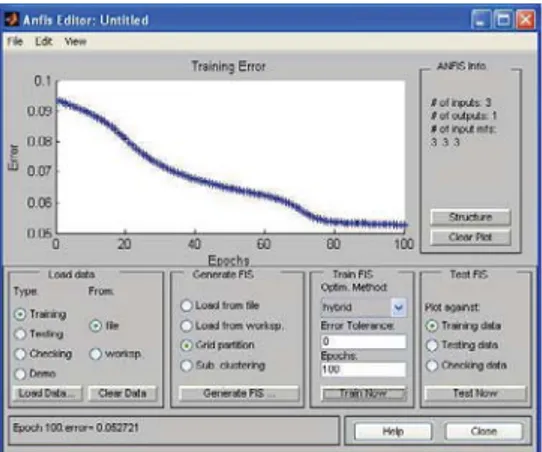
Gambar 2. Hasil pelatihan data
Setelah pelatihan dilakukan, error minimum yang dicapai pada pelatihan data ini adalah sebesar 0.052721 pada saat iterasi ke 80. Hasil dari pelatihan ini berupa gambaran data output yang akan dihasilkan lewat pengujian data, bentuk membership function kedua input lengkap dengan nilai parameter premise serta parameter consequent.
Gambar 3 Hasil pengujian data
2.4 Sistem kendali ANFIS
Gambar 4. Blok diagram sistem kendali ANFIS.
Blok sistem kendali yang digunakan dalam penelitian ini memiliki 3 buah input ( jarak d , posisi p dan kecepatan obyek Vobj ), serta 1 buah output berupa kecepatan robot pada sumbu y (Vy ). Sebelum input ini diproses , terlebih dahulu dilakukan proses normalisasi ( : 100 ) dan proses denormalisasi ( x 100 ) sebelum data output dikeluarkan.
2.4.1 Struktur jaringan ANFIS
Struktur jaringan ANFIS yang didesain, memiliki 3 buah input yaitu estimasi jarak d, posisi obyek terhadap titik tengah layar p dan kecepatan obyek Vobj sedangkan keluarannya berupa nilai Vy. Vy ini adalah kecepatan robot (mm/s) dalam sumbu koordinat y pada
real world. ∏ ∏ ∏ ∏ ∏ ∏ ∏ ∏ ∏ ∏ ∏ ∏
∑
Gambar 5. Struktur jaringan ANFIS.
Pada struktur ANFIS, gambar kotak melambangkan parameter adaptif, dimana parameter tersebut akan berubah pada saat proses pembelajaran.
a. Layer 1
Membangkitan derajat keanggotaan
,
( )
1 l iμ
Aix
Ο =
, untuk i= 1,2,3 atau .... (1.3) , 3( )
l iμ
Bi−y
Ο =
, untuk i= 4,5,6 atau .. (1.4) , 6( )
l iμ
Ci−y
Ο =
, untuk i= 7,8,9 atau .. (1.5)dimana x dan y adalah masukan pada node i dan Ai,
dan Bi-4, adalah fuzzy set yang berhubungan fungsi
gaussian:
( )
2 1 1 2 x c Ax
e
σμ
− ⎛ ⎞ − ⎜⎝ ⎟⎠=
... (1.6)dimana
c
,
σ
adalah parameter dari fungsi keanggotaan yang disebut parameter premise.b. Layer 2
Membangkitkan firing strength dari suatu aturan yaitu dengan mengalikan setiap sinyal masukan, sebagai berikut :
2,i i Ai( ) Bi( ) Ci( )
o =w =μ x ×μ y ×μ y ... (1.7) dimana i= 1,2,3,4,5,6,7,..,27
c. Layer 3
Bagian untuk menghasilkan keluaran yang firing
strength yang ternormalisasi, menggunakan
persamaan berikut : 3, 1 2 3 i i i
w
o
w
w
w
w
=
=
+
+
... (1.8) dimana i= 1,2,3,4,5,6,7,..,27d. Layer 4
Menghitung keluaran kaidah berdasarkan parameter
consequent, parameter-parameter consequent
tersebut adalah adalah pi , qi , ri , si maka persamaan
pada layer-4 ini adalah :
4,i i i i( i 1 i 2 i 3 i)
o =w f =w p x +q x +r x +s
.... (1.9) e. Layer 5
Menghitung sinyal keluaran ANFIS dengan menjumlahkan semua sinyal yang masuk :
5 i i i i i i i w f o w f w =
∑
=∑
∑
... (1.20) 3. Hasil Dan PembahasanGambar 6 merupakan obyek penelitian yang berupa mobile robot dengan menggunakan 3 wheels omni-directional yang telah dilengkapi dengan sensor vision.
Gambar 6. Robot 3 wheels omni-directional.
3.1. Hasil Pengujian.
Agar respon dari pergerakan robot yang diakibatkan oleh adanya obyek, dapat dikatahui karakteristiknya maka perlu dilakukan pengujian. Pengujian awal menggunakan simulator dimana obyek ditempatkan depan robot dan bergerak berlawanan dengan arah gerak robot. Kecepatan obyek sama dengan kecepatan robot kecepatan robot.
Gambar 7. Hasil simulasi pada saat obyek bergerak lurus di depan robot.
Gambar 8. Respon simulasi robot pada saat obyek pada posisi lurus didepan.
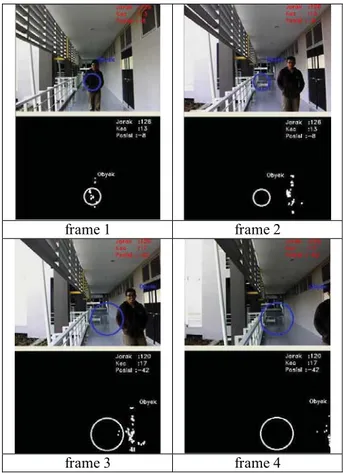
frame 1 frame 2
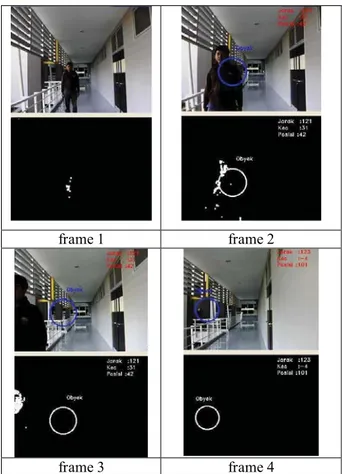
frame 3 frame 4
Gambar 9. Hasil implementasi pada saat obyek bergerak lurus didepan robot
Pada saat implementasi robot dimana posisi obyek berada lurus didepan, maka jalur robot berjalan akan berubah. Perubahan tersebut terjadi karena adanya peningkatan nilai Vy dari 0 mm/s ke 284 mm/s.
Gambar 10. Respon implementasi robot pada saat obyek pada posisi lurus didepan
Pengujian selanjutnya adalah pada saat posisi obyek di sebelah kiri robot, hasil pengujian secara simulasinya adalah sebagai berikut
Gambar 11. Hasil simulasi robot pada saat obyek pada posisi kiri depan
Gambar 12. Respon simulasi robot pada saat obyek pada posisi kiri depan
Berdasarkan gambar 11, pada saat robot mendeteksi adanya obyek pada posisi kiri depan maka jalur robot berjalan akan mengalami perubahan, perubahan ini diakibatkan oleh adanya obyek sehingga nilai Vy yang semula 0 cm/s akan berubah ke -4 cm/s. Pada saat obyek telah dilewati maka robot akan kembali ke posisi awal pada saat obyek belum terdeteksi.
frame 1 frame 2
frame 3 frame 4
Gambar 13. Hasil implementasi robot pada saat obyek pada posisi kiri depan
Percobaan implementasi robot selanjutnya adalah menempatkan obyek pada posisi kiri depan. Pada saat obyek terdeteksi maka jalur robot berjalan akan berubah. Perubahan tersebut terjadi karena adanya nilai Vy yang semula 0 mm/s berubah ke -300 mm/s.
Grafik 14. Respon implementasi robot pada saat obyek pada posisi kiri depan
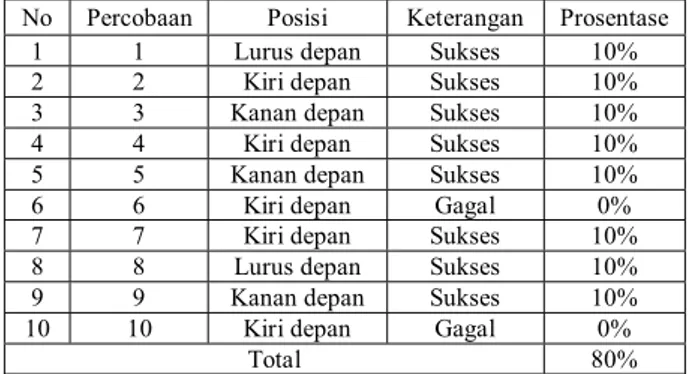
Tabel 2. Hasil pengujian implementasi robot penghindar halangan
No Percobaan Posisi Keterangan Prosentase 1 1 Lurus depan Sukses 10% 2 2 Kiri depan Sukses 10% 3 3 Kanan depan Sukses 10% 4 4 Kiri depan Sukses 10% 5 5 Kanan depan Sukses 10% 6 6 Kiri depan Gagal 0% 7 7 Kiri depan Sukses 10% 8 8 Lurus depan Sukses 10% 9 9 Kanan depan Sukses 10% 10 10 Kiri depan Gagal 0%
Total 80%
Setelah dilakukan 10 kali pengujian dengan 3 posisi obyek yang berbeda, robot berhasil menghindari halangan 8 kali dan gagal 2 kali. Kegagalan ini diakibatkan kegagalan proses segmentasi warna HSV untuk mendeteksi obyek, sehingga estimasi jarak mengalami sedikit perubahan pada saat ada maupun tidak ada obyek.
3.2 Pembahasan
Pengujian ini dilakukan dengan pergerakan obyek yang sama tetapi dengan posisi dan kecepatan yang berbeda. Berdasarkan hasil pengujian simulasi pada saat obyek bergerak lurus dengan robot nilai Vy akan berubah dari 0 cm/s menjadi 8 cm/s. Pada saat posisi obyek berada pada kanan depan, kecepatan Vy dari robot akan dinaikkan dari 0 cm/s menjadi -4 cm/s, sedangkan apabila pada posisi kiri depan Vy akan berubah dari 0 cm/s menjadi 4 cm/s.
Pada pengujian implementasi mobile robot, pada saat posisi obyek berada pada posisi didepan lurus dengan robot, dimana estimasi jarak = 120 cm, kecepatan = 17 cm/s dan posisi obyek = -42 maka nilai Vy yang akan dikeluarkan sebesar 284 mm/s. Apabila obyek dideteksi pada posisi kanan depan, dengan estimasi jarak = 180 cm, kecepatan = 8 cm/s dan posisi = -17, maka nilai Vy yang akan dikeluarkan adalah sebesar 190 mm/s. Hal ini berbeda pada saat robot mendeteksi obyek pada posisi kiri depan, dimana nilai yang dikeluarkan Vy = -300 mm/s, pada saat estimasi jarak = 121 cm, kecepatan = 31 cm/s dan posisi = 42.
Berdasarkan hasil pengujian pada tabel 3 tingkat keberhasilan robot menghindari halangan pada saat dilakukan pengujian sebanyak 10 kali didapatkan bahwa 8 kali robot sukses menghindari halangan dan 2 kali gagal, dimana tingkat keberhasilan robot untuk menghindari halangan pada pengujian 10 kali adalah 80%.
4. Kesimpulan
Berdasarkan penelitian yang telah dilakukan didapatkan kesimpulan bahwa lintasan mobile robot menggunakan kendali ANFIS akan mengalami perubahan pada saat estimasi jarak, kecepatan dan posisi obyek bisa ditentukan. Proses pengolahan informasi visual untuk menentukan obyek disini menggunakan model segmentasi HSV yang diberi nilai tresholding. Pengujian mobile robot untuk menghindari halangan ini dilakukan sebanyak 10 kali, dengan tingkat keberhasilan sebesar 80%, dimana obyek berada pada posisi lurus, kiri depan dan kanan depan dari robot.
Mempertimbangkan prosentase tingkat keberhasilan pengujian ini, dapat disimpulkan bahwa konsep yang dilakukan pada penelitian ini bisa digunakan sebagai acuan dasar mobile robot untuk menghindari dynamic obstacle pada area koridor. Parameter minimal yang harus bisa disensing oleh mobile robot untuk menghindari dynamic obstacle pada area koridor diantaranya adalah jarak, kecepatan dan posisi obyek.
5. Saran
Penelitian yang telah dilakukan masih terdapat kekurangan, kekurangan tersebut diantaranya estimasi jarak obyek memiliki error 75% karena dalam penelitian ini masih menggunakan single camera. Salah satu solusi untuk mendapatkan estimasi jarak dengan error lebih rendah penulis menyarankan untuk menggunakan stereo camera.
6. Pustaka
[1] Ma Xiaowei, Li Xiaoli, Qiao Hong. (2001), Fuzzy
Neural Network-Based Real Time Self-Reaction of Mobile Robot in Unknown Environtmen,
Pergamon, Mechatronics 11 (2001) 1093 – 1052. [2] [2] Rusu. P., Emil M. Petriu, Fellow, IEEE, Thom
E. Whalen, Aurel Cornell, and Hans J. W. Spoelder. (2003). Behavior-Based Neuro-Fuzzy
Controller for Mobile Robot Navigation. IEEE
Trans. on Instrumentation and Measurement Vol. 52, No. 4, p. 1335 - 1340.
[3] [3] Budiharto Widodo., Purwanto Djoko., Jazidie A. (2010). Indoor Navigation using Adaptive
Neuro Fuzzy Controller for Servant Robot. in proc.
IEEE 2nd International Conference on Computer Engineering and Its Application (ICCEA 2010), Bali Indonesia, pp. 582.586 DOI:10.1109/ ICCEA.2010.119.
[4] Takahashi. M. (2010). Developing a mobile robot
for transport applications in the hospital domain,
Elsevier. on Robotics and Autonomous System, doi:10.1016/j.robot.2010.03.010.
[5] Chen Wen, Shi Yun Q, Guorong Xuan. (2007.
Indentifying Computer Graphics Using Color Model and Statistical Moments of Characteristic Functions. Multimedia and Expo 2007 IEEE
International Conference, ISBN: 1-4244-1016-9, 08 August 2007.
[6] J.S. Roger. Jang, C. T. Sun. (1997). Neuro-Fuzzy
and Soft Computing.
[7] Rostami. V, Ebrahimijam. S, Khajehpoor. P, Mirzaei. P, Yousefiazar. M. (2005a). Cooperative
Multi Agent Soccer Robot Team, World Academy
of Science, Engineering and Technology 9 2005. [8] Rostami. V, Sojodishijani. O, Ebrahimijam. S,
MohsenizanjaniNejad. Ali. (2005b). Fuzzy Error
Recovery in Feedback Control for Three Wheel Omnidirectional Soccer Robot, World Academy of
Science, Engineering and Technology 9 2005.
[9] [9] Wahyu Setyo Pambudi, Irma Salamah, Alan Novi Tompunu. (2011). Deteksi dan Estimasi
Jarak Obyek Menggunakan Single Camera Dengan Model Segmentasi HSV, SEMINAR
NASIONAL TEKNOIN 2011.
[10] Mahesian E and Katebi Y. (2007). Robot Motion
Planning in Dynamics Environment with Moving Obstacle and Target, World Academy of Science,