Perbandingan Inversi Least-Square dengan
Levenberg-Marquardt pada Metode Geomagnet untuk Model
Crustal Block
Umar Said
a), Mohammad Heriyanto
b), dan Wahyu Srigutomo
c)Laboratorium Fisika Bumi,
Kelompok Keilmuan Fisika Bumi dan Sistem Kompleks,
Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Teknologi Bandung, Jl. Ganesha no. 10 Bandung, Indonesia, 40132
a)saidu3694@gmail.com (corresponding author) b)mheriyanto37@gmail.com
c)wahyu@fi.itb.ac.id
Abstrak
Metode geomagnet merupakan metode geofisika yang memanfaatkan informasi perbedaan magnetisasi batuan bawah permukaan bumi. Metode geomagnet umum digunakan pada eksplorasi awal pencarian sumber panasbumi atau juga pemetaan sesar/patahan di bawah permukaan. Salah satu metode inversi yang sering digunakan dalam pengolahan data geomagnet adalah inversi Least-Square (LS) dan Levenberg-Marquardt (LM). Tujuan penelitian ini adalah membandingkan inversi LS dengan LM dalam hal keakuratan penentuan parameter model berdasarkan error root-mean-square (rms) dan banyaknya iterasi. Data yang digunakan berupa data sintetik dan bernoise dari model crustal block. Hasil dari penelitian ini menunjukan bahwa kedua inversi ini sangat bergantung terhadap tebakan model awal dan LM juga bergantung terhadap faktor redaman (λ). Inversi LS lebih baik digunakan untuk data tanpa noise dengan error rms-nya sebesar 2.1×10-10. Data dengan tambahan noise sebesar 5% dan 10 %, inversi LM lebih efektif dan baik daripada
LS, dengan error rms-nya sebesar 4.29×10-8 dan 5.73×10-5.
Keywords: Geomagnet, least-square, levenberg-marquardt, crustal block, noise
PENDAHULUAN
Geofisika merupakan satu cabang ilmu yang mempelajari bumi menggunakan prinsip-prinsip fisika. Penelitian geofisika ditujukan untuk mengetahui kondisi bawah permukaan bumi melalui pengukuran-pengukuran yang dilakukan di atas permukaan bumi. Pengukuran ini kemudian ditafsirkan sebagaimana sifat-sifat dan kondisi di bawah permukaan. Metode geofisika terbagi menjadi dua kategori, geofisika aktif dan geofisika pasif. Metode pasif dilakukan dengan mengukur respon alami yang dihasilkan oleh bumi seperti medan elektromagnetik, magnet bumi, potensial bumi, gravitasi bumi, gempa bumi dan lain sebagainya. Sedangkan metode aktif dilakukan dengan membuat gangguan buatan kemudian diukur respons terhadap gangguan tersebut [1]. Salah satu bagian terpenting dalam geofisika adalah proses menafsirkan respon/data yang bergantung dengan kondisi dan sifat fisis batuan bawah permukaan, atau yang dikenal dengan proses interpretasi. Interpretasi data dapat dilakukan secara kualitatif ataupun kuantitatif. Interpretasi kualitatif dilakukan dengan cara mengamati pola data atau anomali yang diperoleh. Anomali dengan pola tertentu berasosiasi dengan sumber anomali bawah permukaan dengan geometri tertentu. Hubungan antara pola anomali dengan parameter model diperoleh dari perumusan sederhana. Hasil dari interpretasi kualitatif mencakup perkiraan posisi, ukuran, dan kedalaman benda yang menimbulkan anomali tersebut. Sedangkan interpretasi kuantitatif dilakukan melalui pemodelan kedepan dan inversi. Dalam hal ini, model
merepresentasi keadaan geologi bawah permukaan dengan besaran fisis dan geometri tertentu (variasi spasial). Model sederhana dipilih agar permasalahan dapat disederhanakan dan respon/data dapat dihitung secara matematis dengan memanfaatkan teori fisika.
Metode geomagnet merupakan metode geofisika pasif yang didasarkan pada sifat kemagnetan batuan sehingga sensitivitas metode ini bergantung pada kontras magnetisasi bawah permukaan. Magnetasi bumi ditentukan oleh medan magnet bumi yang terdiri dari 3 bagian, yaitu medan utama, medan luar dan anomali medan magnetik. Medan utama ditimbulkan dari medan magnet utama yang dihasilkan oleh bumi, medan luar berasal dari pengaruh luar bumi yang merupakan hasil dari ionisasi di atmosfer yang ditimbulkan oleh sinar ultraviolet dan matahari. Sedangkan anomali medan magnetik merupakan terget dari pengukuran geomagnet, karena medan anomali ini berasosiasi dengan besarnya intensitas magnetisasi dari suatu batuan. Besar anomali ini berkisar nilai ratusan sampai ribuan nT (nano Tesla). Secara garis besar anomali ini disebabkan oleh medan magnetik remanen dan medan magnet induksi [3].
Tujuan penelitian ini adalah membandingkan inversi least-square (LS) dan Levenberg-Marquardt (LM) pada metode geomagnet.
METODE PENELITIAN
Penelitian ini menggunakan data sintetik yang diperoleh dari model uji crustal block dengan posisi dan ukuran geometri benda anomali magnetiknya ditetapkan pada suatu nilai tertentu. Data sintetik ini kemudian divariasikan dengan memberikan tambahan noise sebesar 5% dan 10%. Kemudian dilakukan inversi LS dan LM terhadap ketiga data tersebut. Pembuatan program pemodelan kedepan, inversi LS, dan LM dilakukan pada software MATLAB MathWorks®.
Pemodelan Kedepan Model Crustal Block
Pemodelan kedepan merupakan suatu proses perhitungan ‘data’ yang secara teoritis akan teramati di permukaan bumi jika diketahui harga parameter model tertentu bawah permukaan. Ilustrasinya ditunjukan pada Gambar. 1 di bawah ini:
Gambar 1. Ilustrasi pemodelan kedepan
Pada penelitian ini digunakan model uji crustal block yang geometrinya sudah ditetapkan [3].
Gambar 2. Model crustal block
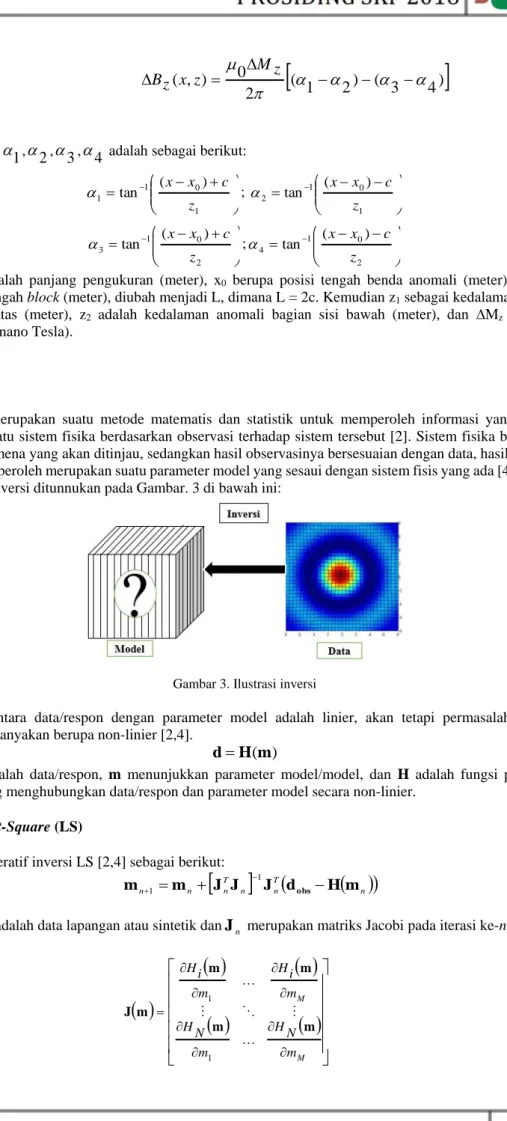
Berdasarkan Gambar. 2 diatas, perumusan anomali magnetik di setiap titik pengukuran adalah sebagai berikut:
( 1 2) ( 3 4)
2 0 ) , (
Bz x z Mz (1) Dimana nilai
1,
2,
3,
4 adalah sebagai berikut: 1 0 1 1 ) ( tan z c x x ; 1 0 1 2 ) ( tan z c x x 2 0 1 3 ) ( tan z c x x ; 2 0 1 4 ) ( tan z c x x
dimana x adalah panjang pengukuran (meter), x0 berupa posisi tengah benda anomali (meter), c adalah
panjang setengah block (meter), diubah menjadi L, dimana L = 2c. Kemudian z1 sebagai kedalaman anomali
bagian sisi atas (meter), z2 adalah kedalaman anomali bagian sisi bawah (meter), dan ∆Mz = kontras
magnetisasi (nano Tesla).
Inversi
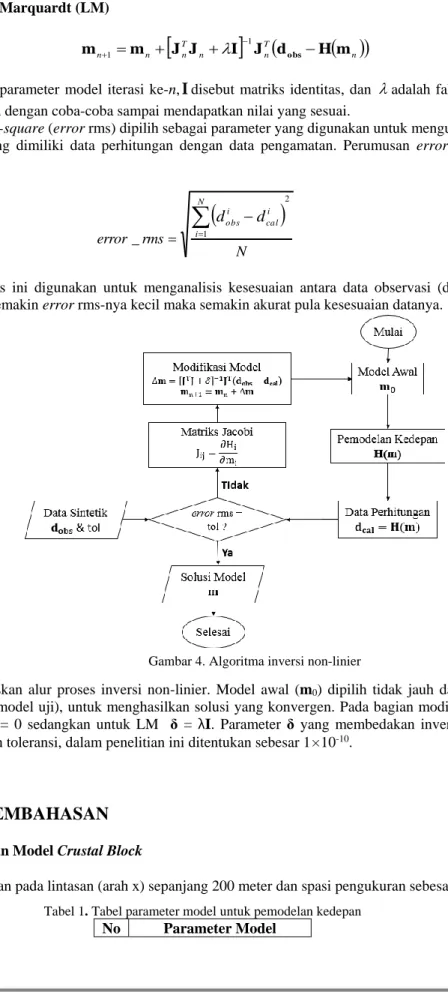
Inversi merupakan suatu metode matematis dan statistik untuk memperoleh informasi yang berguna mengenai suatu sistem fisika berdasarkan observasi terhadap sistem tersebut [2]. Sistem fisika bersesuaian dengan fenomena yang akan ditinjau, sedangkan hasil observasinya bersesuaian dengan data, hasil informasi yang ingin diperoleh merupakan suatu parameter model yang sesaui dengan sistem fisis yang ada [4]. Ilustrasi pemodelan inversi ditunnukan pada Gambar. 3 di bawah ini:
Gambar 3. Ilustrasi inversi
Hubungan antara data/respon dengan parameter model adalah linier, akan tetapi permasalahan dalam geofisika kebanyakan berupa non-linier [2,4].
) (m
H
d (2)
dimana d adalah data/respon, m menunjukkan parameter model/model, dan H adalah fungsi pemodelan kedepan yang menghubungkan data/respon dan parameter model secara non-linier.
Inversi Least-Square (LS)
Persamaan iteratif inversi LS [2,4] sebagai berikut:
n
T n n T n n n m J J J d Hm m obs 1 1 (3)Dengan dobs adalah data lapangan atau sintetik danJn merupakan matriks Jacobi pada iterasi ke-n.
M M m N H m N H m i H m i H m m m m m J 1 1 (4)dimana i berasosiasi pada pengukuran ke-i, N adalah banyak titik pengukuran dan M berupa banyak parameter model. Inversi Levenberg-Marquardt (LM)
n
T n n T n n n m J J I J d Hm m obs 1 1 (5)dimana mn adalah parameter model iterasi ke-n,Idisebut matriks identitas, dan adalah faktor redaman yang nilainya dipilih dengan coba-coba sampai mendapatkan nilai yang sesuai.
Error root-mean-square (error rms) dipilih sebagai parameter yang digunakan untuk mengukur seberapa besar kesalahan yang dimiliki data perhitungan dengan data pengamatan. Perumusan error rms sebagai berikut:
N rms error N i i cal i obs d d 2 1 _
(6)Hasil dari error rms ini digunakan untuk menganalisis kesesuaian antara data observasi (dobs) dan data
perhitungan (dcal), semakin error rms-nya kecil maka semakin akurat pula kesesuaian datanya.
Gambar 4. Algoritma inversi non-linier
Gambar. 4 menjelaskan alur proses inversi non-linier. Model awal (m0) dipilih tidak jauh dari parameter
model sebenarnya (model uji), untuk menghasilkan solusi yang konvergen. Pada bagian modifikasi model, untuk inversi LS δ = 0 sedangkan untuk LM δ = λI. Parameter δ yang membedakan inversi keduanya. Sementara tol adalah toleransi, dalam penelitian ini ditentukan sebesar 1×10-10.
HASIL DAN PEMBAHASAN
Pemodelan Kedepan Model Crustal Block
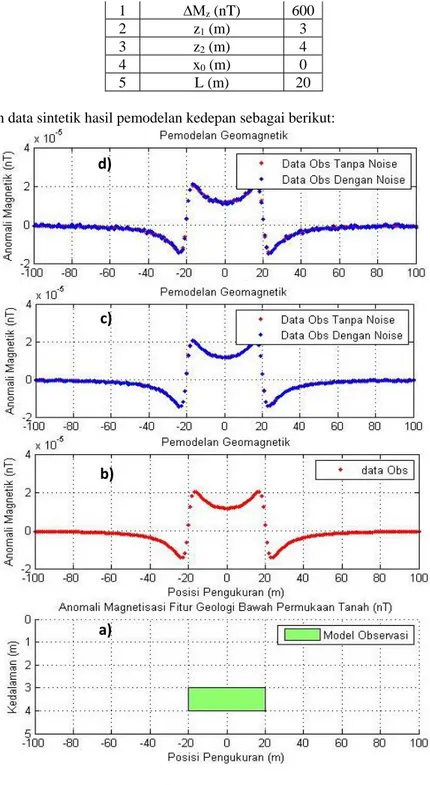
Pengukuran dilakukan pada lintasan (arah x) sepanjang 200 meter dan spasi pengukuran sebesar 1 meter.
Tabel 1. Tabel parameter model untuk pemodelan kedepan
1 ∆Mz (nT) 600
2 z1 (m) 3
3 z2 (m) 4
4 x0 (m) 0
5 L (m) 20
Sehingga diperoleh data sintetik hasil pemodelan kedepan sebagai berikut:
Gambar 6. Hasil pemodelan kedepan dengan model uji crustal block. a) model bawah permukaan b) Data sintetik tanpa
noise c) Noise 5% dan d) Noise 10 %.
Penambahan noise dilakukan dengan cara menambahkan masing-masing data tanpa noise dengan 5% atau 10 % dari masing-masing data tersebut, sehingga pada Gambar. 6(c) dan 6(d) terlihat ada data yang berubah nilainya dari data sintetik (data tanpa noise). Penambahan noise ini bertujuan untuk membuat data sintetik berperilaku seperti data lapangan (tidak ideal/banyak noise), kemudian juga untuk menguji ketahanan metode inversi yang dipilih terhadap data yang mempunyai noise.
Inversi
Hasil inversi LS dan LM pada data sintetik tanpa noise sebagai berikut: a)
b) c) d)
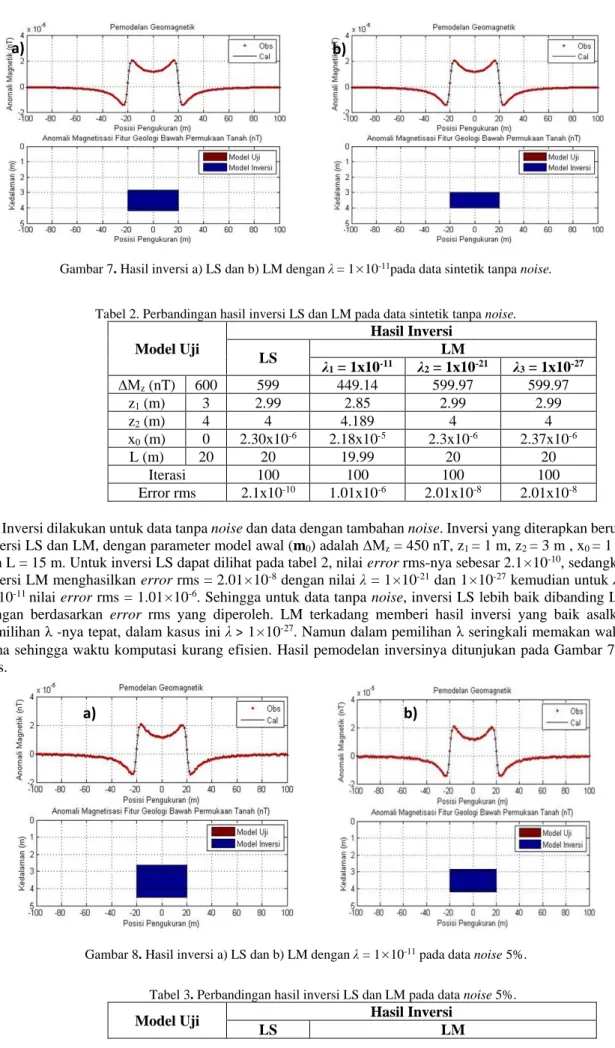
Gambar 7. Hasil inversi a) LS dan b) LM dengan λ = 1×10-11pada data sintetik tanpa noise.
Tabel 2. Perbandingan hasil inversi LS dan LM pada data sintetik tanpa noise.
Model Uji Hasil Inversi LS λ1 LM = 1x10-11 λ2 = 1x10-21 λ3 = 1x10-27 ∆Mz (nT) 600 599 449.14 599.97 599.97 z1 (m) 3 2.99 2.85 2.99 2.99 z2 (m) 4 4 4.189 4 4 x0 (m) 0 2.30x10-6 2.18x10-5 2.3x10-6 2.37x10-6 L (m) 20 20 19.99 20 20 Iterasi 100 100 100 100 Error rms 2.1x10-10 1.01x10-6 2.01x10-8 2.01x10-8
Inversi dilakukan untuk data tanpa noise dan data dengan tambahan noise. Inversi yang diterapkan berupa inversi LS dan LM, dengan parameter model awal (m0) adalah ∆Mz = 450 nT, z1 = 1 m, z2 = 3 m , x0 = 1 m,
dan L = 15 m. Untuk inversi LS dapat dilihat pada tabel 2, nilai error rms-nya sebesar 2.1×10-10, sedangkan
inversi LM menghasilkan error rms = 2.01×10-8 dengan nilai λ = 1×10-21 dan 1×10-27 kemudian untuk λ =
1×10-11 nilai error rms = 1.01×10-6. Sehingga untuk data tanpa noise, inversi LS lebih baik dibanding LM
dengan berdasarkan error rms yang diperoleh. LM terkadang memberi hasil inversi yang baik asalkan pemilihan λ -nya tepat, dalam kasus ini λ > 1×10-27. Namun dalam pemilihan λ seringkali memakan waktu
lama sehingga waktu komputasi kurang efisien. Hasil pemodelan inversinya ditunjukan pada Gambar 7 di atas.
Gambar 8. Hasil inversi a) LS dan b) LM dengan λ = 1×10-11 pada data noise 5%.
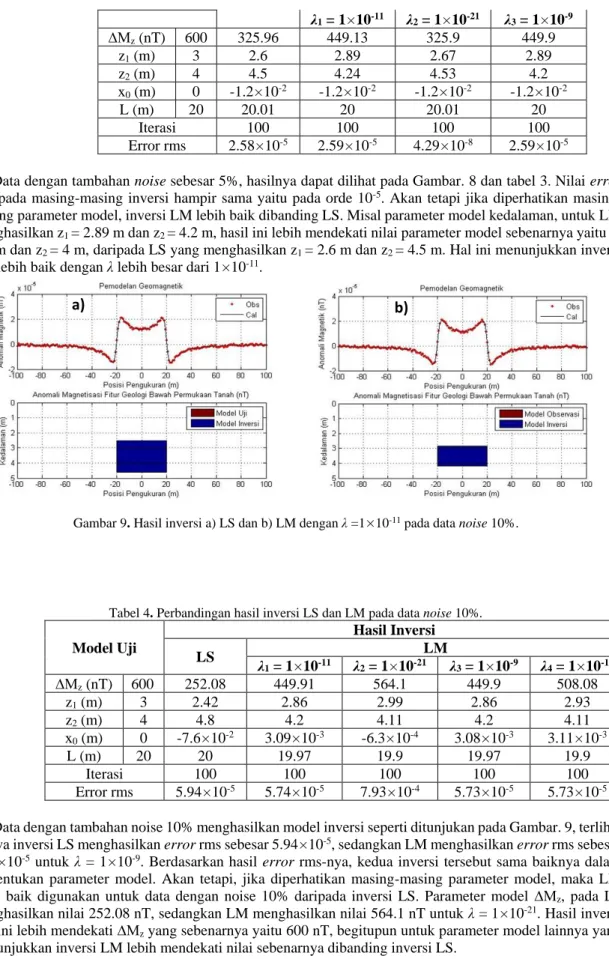
Tabel 3. Perbandingan hasil inversi LS dan LM pada data noise 5%.
Model Uji Hasil Inversi
b) a)
b) a)
λ1 = 1×10 λ2 = 1×10 λ3 = 1×10 ∆Mz (nT) 600 325.96 449.13 325.9 449.9 z1 (m) 3 2.6 2.89 2.67 2.89 z2 (m) 4 4.5 4.24 4.53 4.2 x0 (m) 0 -1.2×10-2 -1.2×10-2 -1.2×10-2 -1.2×10-2 L (m) 20 20.01 20 20.01 20 Iterasi 100 100 100 100 Error rms 2.58×10-5 2.59×10-5 4.29×10-8 2.59×10-5
Data dengan tambahan noise sebesar 5%, hasilnya dapat dilihat pada Gambar. 8 dan tabel 3. Nilai error rms pada masing-masing inversi hampir sama yaitu pada orde 10-5. Akan tetapi jika diperhatikan
masing-masing parameter model, inversi LM lebih baik dibanding LS. Misal parameter model kedalaman, untuk LM menghasilkan z1 = 2.89 m dan z2 = 4.2 m, hasil ini lebih mendekati nilai parameter model sebenarnya yaitu z1
= 3 m dan z2 = 4 m, daripada LS yang menghasilkan z1 = 2.6 m dan z2 = 4.5 m. Hal ini menunjukkan inversi
LM lebih baik dengan λ lebih besar dari 1×10-11.
Gambar 9. Hasil inversi a) LS dan b) LM dengan λ =1×10-11 pada data noise 10%.
Tabel 4. Perbandingan hasil inversi LS dan LM pada data noise 10%.
Model Uji Hasil Inversi LS λ1 LM = 1×10-11 λ2 = 1×10-21 λ3 = 1×10-9 λ4 = 1×10-15 ∆Mz (nT) 600 252.08 449.91 564.1 449.9 508.08 z1 (m) 3 2.42 2.86 2.99 2.86 2.93 z2 (m) 4 4.8 4.2 4.11 4.2 4.11 x0 (m) 0 -7.6×10-2 3.09×10-3 -6.3×10-4 3.08×10-3 3.11×10-3 L (m) 20 20 19.97 19.9 19.97 19.9 Iterasi 100 100 100 100 100 Error rms 5.94×10-5 5.74×10-5 7.93×10-4 5.73×10-5 5.73×10-5
Data dengan tambahan noise 10% menghasilkan model inversi seperti ditunjukan pada Gambar. 9, terlihat bahwa inversi LS menghasilkan error rms sebesar 5.94×10-5, sedangkan LM menghasilkan error rms sebesar
5.73×10-5 untuk λ = 1×10-9. Berdasarkan hasil error rms-nya, kedua inversi tersebut sama baiknya dalam
menentukan parameter model. Akan tetapi, jika diperhatikan masing-masing parameter model, maka LM lebih baik digunakan untuk data dengan noise 10% daripada inversi LS. Parameter model ∆Mz, pada LS
menghasilkan nilai 252.08 nT, sedangkan LM menghasilkan nilai 564.1 nT untuk λ = 1×10-21. Hasil inversi
LM ini lebih mendekati ∆Mz yang sebenarnya yaitu 600 nT, begitupun untuk parameter model lainnya yang
menunjukkan inversi LM lebih mendekati nilai sebenarnya dibanding inversi LS.
Hasil inversi LM dan LS sangat bergantung terhadap tebakan awal. Apabila tebakan awal tidak terlalu dekat dengan parameter model sebenarnya maka inversi LS akan menghasilkan solusi inversi yang divergen atau menuju tak hingga atau tak definisi. Namun untuk LM akan tergantung juga terhadap faktor redaman, jadi tidak langsung menghasilkan solusi divergen seperti LS. Pada kedua data bernoise tersebut, inversi LM
lebih baik dibanding LS. Hal ini terjadi ketika pemilihan λ-nya tepat. Ketika pemilihan λ tepat maka persamaan iteratif (5) akan menghasilkan solusi inversi yang konvergen dan dekat dengan nilai parameter model sebenarnya.
Pada penelitian ini, parameter banyaknya iterasi tidak bisa dianalisis lebih lanjut untuk membandingkan inversi LS dan LM. Hal ini terjadi karena dalam proses perhitungan inversi, banyaknya iterasi selalu bernilai 100, nilai ini sebenarnya batas maksimum iterasi yang mampu dijalankan oleh program.
KESIMPULAN
1. Data tanpa noise inversi LS lebih baik dan cepat dibanding inversi LM dalam menentukan parameter model. LM tergantung nilai λ yang diberikan. Pada data tanpa noise, LM baik untuk λ > 1×10-27.
Solusi inversi LS dan LM sangat bergantung dengan tebakan parameter model awal.
2. Data dengan noise 5% inversi LM dengan error rms 4.29×10-8 lebih baik dalam menentukan
parameter model dibanding inversi LS. Hasil LM sangat baik ketika menggunakan λ > 1×10-11.
Sedangkan pada inversi LS error rmsnya bernilai 2.58x10-5.
3. Inversi LM lebih efektif untuk digunakan pada data bernoise dengan memperhitungkan nilai λ yang digunakan. Tetapi untuk data yang ‘teratur’ (data tanpa noise) maka inversi LS lebih efektif dibanding inversi LM yang harus diatur terlebih dahulu λ -nya supaya menghasilkan nilai yang sesuai. Sehingga hasil inversi LM sangat bergantung dengan nilai λ yang dipilih.
REFERENSI
1. W. M. Telford, et all, Applied Geophysics 2 Ed. Cambridge University Press, Melbourne (1990) 2. W. Menke, Geophysical Data Analysis: Discrete Inverse Theory. Academic Press, New York (1984) 3. W. Lowrie, Fundamental of Geophysics 2 Ed. Cambridge University Press, New York (2007) 4. H. Grandis, Pengantar Pemodelan Inversi Geofisika. HAGI, CV. Bumi Printing, Bandung (2009)