LAPORAN
PENELITIAN MANDIRI
ESTIMASI GETARANMEKANIK PADA TELESCOPIC SHOCK ABSORBER MOTOR YAMAHA JUPITER
Oleh: ABDUL HADI
NIP.19650905 199412 1 001
UNIVERSITAS PATTIMURA MARET 2015
HalamanPengesahan
JudulKegiatan : Estimasi GetaranMekanikPada Telescopic Shock Absorber Motor
Yamaha Jupiter Peneliti/Pelaksana
NamaLengkap : Abdul Hadi, ST.,MT
NIDN : 0005096504
Jabatanfungsional : AsistenAhli
Program Studi : TekniksistemPerkapalan
Nomor HP : 081233232337
Surel (e-mail) :
-InstitusiMitra :
-Alamat : Jl. LorongPutri RT/RW 002/019 DesaBatuMerah - Ambon
WaktuPelaksanaan : 3 bulan BiayaKeseluruhan : Rp 3.000.000,-Ambon, 14 Oktober 2015 Menyetujui, DekanFakultasTeknik Ir. DaudIlela, MT NIP.19531210 198003 1 006 Peneliti, Abdul Hadi, ST.,MT NIP. 19650905 199412 1 001 Mengetahui, KetuaLembagaPenelitian
Prof.Dr.Ir. Rafael M.Osok,MSc NIP. 19601024 198803 1 001
HalamanPengesahan
JudulKegiatan : Estimasi GetaranMekanikPada Telescopic Shock Absorber Motor
Yamaha Jupiter Peneliti/Pelaksana
NamaLengkap : Abdul Hadi, ST.,MT
NIDN : 0005096504
Jabatanfungsional : AsistenAhli
Program Studi : TekniksistemPerkapalan
Nomor HP : 081233232337
Surel (e-mail) :
-InstitusiMitra :
-Alamat : Jl. LorongPutri RT/RW 002/019 DesaBatuMerah - Ambon
WaktuPelaksanaan : 3 bulan BiayaKeseluruhan : Rp 3.000.000,-Ambon, 14 Oktober 2015 Menyetujui, DekanFakultasTeknik Ir. DaudIlela, MT NIP.19531210 198003 1 006 Peneliti, Abdul Hadi, ST.,MT NIP. 19650905 199412 1 001 Mengetahui, KetuaLembagaPenelitian
Prof.Dr.Ir. Rafael M.Osok,MSc NIP. 19601024 198803 1 001
HalamanPengesahan
JudulKegiatan : Estimasi GetaranMekanikPada Telescopic Shock Absorber Motor
Yamaha Jupiter Peneliti/Pelaksana
NamaLengkap : Abdul Hadi, ST.,MT
NIDN : 0005096504
Jabatanfungsional : AsistenAhli
Program Studi : TekniksistemPerkapalan
Nomor HP : 081233232337
Surel (e-mail) :
-InstitusiMitra :
-Alamat : Jl. LorongPutri RT/RW 002/019 DesaBatuMerah - Ambon
WaktuPelaksanaan : 3 bulan BiayaKeseluruhan : Rp 3.000.000,-Ambon, 14 Oktober 2015 Menyetujui, DekanFakultasTeknik Ir. DaudIlela, MT NIP.19531210 198003 1 006 Peneliti, Abdul Hadi, ST.,MT NIP. 19650905 199412 1 001 Mengetahui, KetuaLembagaPenelitian
Prof.Dr.Ir. Rafael M.Osok,MSc NIP. 19601024 198803 1 001
DAFTAR ISI HALAMAN JUDUL ... i LEMBARAN PENGESAHAN ... ii RINGKASAN ... iii DAFTAR ISI ... iv BAB I PENDAHULUAN 1.1. Latar belakang... 1 1.2. Rumusan masalah... 3 1.3. Tujuan Penelitian ... 3 1.4. Batasan masalah... 3
BAB II TINJAUAN PUSTAKA 2.1. Sistem suspensi ... 5
2.2. Prinsip kerja suspensi... 7
2.3. Sistem suspensi depan ( Front suspension ) ... 8
2.4. Getaran mekanik... 13
2.5. Pemodelan sistem dan persamaan yang dikembangkan ... 16
2.6. Redaman viskos... 19
2.7. Kekakuan pegas ... 23
BAB III METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian ... 24
3.2. Variabel penelitian... 24
3.3.Alat dan bahan penelitian... 24
3.4.Metode analisa data... 25
3.5.Mekanisme percobaan... 26
3.7. Diagram alir... 27 BAB IV HASIL DAN PEMBAHASAN
4.1 Hasil ... 28 4.1.1 Hasil karakteristik respon frekuensi untuk perlakuan Yamalube
Oil dalam bentuk ( RMS dan Peak-peak )... 28 4.1.2 Hasil karakteristik respon frekuensi untuk perlakuan Jumbo Oil
dalam bentuk ( RMS dan Peak-peak )... 32 4.1.3 Hasil karakteristik respon frekuensi untuk perlakuan Ke-1 dalam
bentuk ( RMS dan Peak-peak ) ... 35 4.2. Pembahasan ...38
4.2.1 Analisa pengaruh fluida terhadap karakteristik getaran respon frekuensi pada jumbo oil dan Yamalube oil untuk ( RMS dan Peak-Peak ) ... 38 4.2.2 Analisa pengaruh fluida terhadap karakteristik getaran respon
frekuensi pada perlakuan 1- 9 untuk ( RMS dan Peak-Peak ) ...40 BAB V KESIMPULAN DAN SARAN
5.1. Kesimpulan ... 43 5.2 Saran ... 43 DAFTAR PUSTAKA
ABSTRAK
Kendaraan bermotor dewasa ini banyak digunakan sebagai alat transportasi. Sesuai fungsinya sebagai alat transportasi maka kendaraan bermotor harus didesain sehingga dapat membuat rasa aman dan nyaman bagi pengendaranya, salah satu faktor yang mempengaruhi kenyamanan sepeda motor adalah sisitem suspensi. Untuk itu
Shock absorber merupakan sebuah alat mekanik yang didesain untuk meredam getaran
dan merupakan bagian penting dalam susupensi kendaraan bermotor, alat ini berfungsi untuk mengurangi efek dari kasarnya permukaan jalan.
Tujuan dari penelitian ini adalah Untuk mengetahui pengaruh getaran respon frekuensi dari merk-merk minyak pelumas dan mengetahui besar respon frekuensi yang terjadi pada berbagai campuran oil damper. Dalam penelitian ini menggunakan metode Desain Eksperimen yaitu melakukan pengujian untuk mendapatkan data dan mengelolahnya secara sistematis dan akurat sehingga dapat mengetahui respon getaran pada Telescopik Shock Absorber Yamaha Jupiter MX 135 CC.
Dari hasil penelitian dan analisis yang dilakukan dapat diperoleh karakteristik pengaruh getaran respon frekuensi dalam bentuk RMS dan Peak-peak. Berdasarkan hasil penelitian dapat diketahui kombinasi pelumas yamalube dan jumbo memberikan remanan yang baik simpangan yang relatif kecil yaitu untuk RMS yakni ; (Displacement
: 31.8 dB re 1pm , Velocity : 67.2 dB re 1nm/s, Acceleration : 103.7 dB re 1 / ).
Untuk Peak-peak yakni ; (Displacement : 40.8 dB re 1pm, Velocity : 76.8 dB re 1nm/s,
Acceleration : 112.8 dB re 1 / ).
BAB I
PENDAHULUAN
1.1 Latar Belakang
Kendaraan bermotor dewasa ini banyak digunakan sebagai alat transportasi. Sesuai fungsinya sebagai alat transportasi maka kendaraan bermotor harus didesain sehingga dapat membuat rasa aman dan nyaman bagi pengendaranya, salah satu faktor yang mempengaruhi kenyamanan sepeda motor adalah sisitem suspensi.
Suspensi pada dasarnya merupakan bagian dari chasis yang dipasangkan di antara body atau rangka dengan roda-roda yang berfungsi untuk meredam getaran-getaran atau kejutan-kejutan (beban dinamis) yang ditimbulkan oleh keadaan jalan dan juga berfungsi sebagai tumpuan atau penahan berat kendaraan (beban statis). Kontruksi suspensi dibuat sedemikian rupa sehingga kendaraan dapat berjalan dengan nyaman dan aman.
Shock absorber adalah sebuah alat mekanik yang didesain untuk meredam
getaran dan merupakan bagian penting dalam susupensi kendaraan bermotor, alat ini berfungsi untuk mengurangi efek dari kasarnya permukaan jalan.
selain itu Shock absorber diharapkan tetap stabil saat sepeda motor menikung, sehingga mudah dikendalikan dengan itu getaran akibat kerja mesin dapat diredam. Oleh Shock absorber gerak ayun naik turun badan sepeda motor diperlambat
2
sehingga menjadi nyaman dan tidak mengejut, itulah sebabnya shock absorber disebut juga sebagai peredam kejut. Dengan demikian, gangguan pada shock
absorber akan berpengaruh langsung pada kenyamanan dan keamanan berkendara.
Media peredaman yang digunakan oleh shock absorber dapat berupa oli, karet (rubber), ataupun gas nitrogen. Gaya redaman dihasilkan akibat adanya tahanan media peredaman baik oli ataupun gas nitrogen melalui saluran output pada saat piston ditekan atau bergerak.
Minyak peredam (Oil damper) berfungsi mengontrol gerakan pegas suspensi (naik maupun turun) melalui lubang-lubang saluran yang terdapat pada piston
damper. Gerakan menahan yang dilakukan oleh piston damper didapatkan dari oli
yang meredam gerakan pegas, melalui perubahan lubang keluar masuknya oli pada saat piston bergerak turun naik.
Berdasarkan observasi atau pengamatan dilapangan bahwa saat ini pabrikan telah menyediakan Oli refile yang bisa kita dapatkan di bengkel resmi maupun bengkel-bengkel non resmi, namun pada umumnya hanya mnggunakan satu merk oli peredam yang sama untuk berbagai jenis sepeda motor. Oli yang digunakan yaitu
jumbo oil shock absorber. Sehingga perlu dikaji sberepa besar redaman yang
dihasilkan oleh penggunaan berbagai jenis merk pelumas yang dipakai sebagai redaman.
3
1.2. Rumusan Masalah
1. Bagaimana pengaruh merk minyak peredam (Oil Damper) terhadap getaran respon frekuensi pada Shock Absorber.
2. Bagaimana pengaruh variasi campuran minyak peredam terhadap getaran respon frekuensi pada shock absorber.
1.3. Tujuan Penelitian
1. Untuk mengetahui karakteristik getaran respon frekuensi dari merk-merk minyak pelumas.
2. Untuk mengetahui besar karakteristik pengaruh getaran respon frekuensi yang
terjadi pada berbagai campuran oil damper. 1.4. Batasan Masalah
1. suspensi depan (Telescopic Shock Absorber) yang digunakan adalah Yamaha Jupiter
2. shock absorber mengalami getaran paksa teredam (kondisi stady) 3. Oil/minyak peredam yang digunakan adalah Yamalube dan Jumbo 4. Penempatan sensor transduser pada shock absorbe telah ditentukan 5. Pengujian dalam keadaan statis (motor tidak berjalan).
6. Kekakuan dari pegas yang dipakai tetap konstan. 7. Suspensi diasumsikan tegak tanpa sudut kemiringan
4
8. Penelitian ini menggunakan sistem getaran satu derajat kebebasan / SDOF (Single Degree Of Freedom)
BAB II
TINJAUAN PUSTAKA
2.1. Sistem Suspensi
Suspensi pada dasarnya merupakan bagian dari chasis yang dipasangkan di antara body atau rangka dengan roda-roda yang berfungsi untuk meredam getaran getaran atau kejutan-kejutan (beban dinamis) yang ditimbulkan oleh keadaan jalan dan juga berfungsi sebagai tumpuan atau penahan berat kendaraan (beban statis). Kontruksi suspensi dibuat sedemikian rupa sehingga kendaraan dapat berjalan dengan nyaman dan aman. Maka dari itu suspensi harus dapat :
1. Menyerap bantingan dan goncangan akibat kondisi jalan. 2. Meneruskan gaya pengereman dan pengemudian.
3. Memungkinkan roda tetap menapak pada jalan. 4. Mengantar gerakan roda.
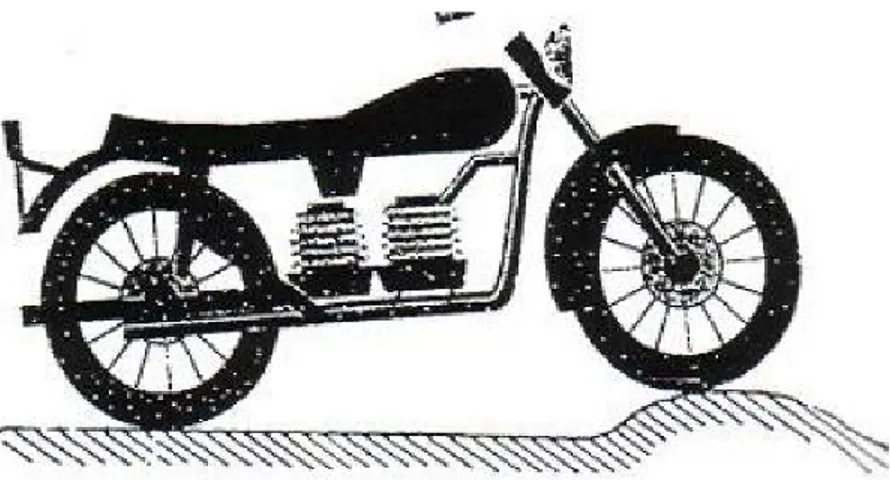
Gambar 2.1. Suspensi Pada Sepeda Motor
Dalam sistem suspensi, roda-roda dihubungkan dengan badan kendaraan melalui berbagai macam sambungan yang membolehkan percepatan vertikal dari roda relative terhadap badan kendaraan dapat diatasi oleh pegas dan peredam. Ketika sebuah beban tambahan ditempatkan pada pegas-pegas atau kendaraan bertemu dengan sebuah bump dijalan, pegas tersebut akan menyerap beban dengan
melakukan kompresi. Jadi sistem suspensi merupakan gabungan/perpaduan antara pegas dan peredam kejut/shock absorber.
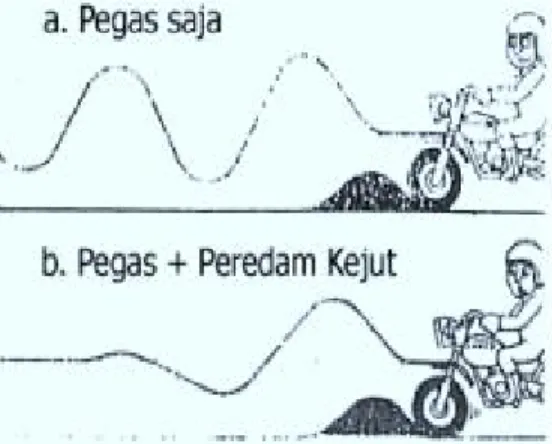
Gambar 2.2 Sistem Suspensi
Sistem suspensi ditujukan untuk menciptakan keamanan dan kenyamanan bagi pengemudi maupun penumpang kendaraan. Sistem suspensi dirancang untuk menahan getaran akibat benturan roda dengan kondisi jalan. Selain itu, sistem suspensi diharapkan mampu untuk membuat lembut saat sepeda motor menikung, sehingga mudah dikendalikan. Dengan sistem suspensi juga, getaran akibat kerja mesin dapat diredam. Semua kegunaan sistem suspensi tadi, pada akhirnya dapat diambil kesimpulan bahwa dengan bekerjanya sistem suspensi, pada dasarnya adalah agar diperoleh kenyamanan dalam berkendara sepeda motor. Dengan demikian, gangguan pada sistem suspensi akan berpengaruh langsung pada kenyamanan berkendara. Kendaraan modern telah mensyaratkan aspek keamanan dan kenyamanan sebagai spesifikasi utama.
Suspensi pada sepeda motor biasanya bersatu dengan garpu (fork), baik untuk bagian depan maupun bagian belakang. Tetapi ada juga sebagian motor, suspensi belakang bukan sekaligus sebagai garpu belakang dan biasanya disebut sebagai monoshock (peredam kejut tunggal).
2.2. Prinsip kerja suspensi
Prinsip kerja sistem suspensi adalah sebagai berikut :
1) Pada saat kendaraan melewati permukaan jalan yang tidak rata Kendaraan akan mengalami kejutan dan getaran yang diterima roda dari permukaan jalan, kemudian kejutan dan getaran tersebut akan diteruskan oleh roda ke sistem suspensi. Pegas suspensi bereaksi dengan cara melakukan gerakan mengayun, kemudian dikembalikan lagi (rebound) ke roda, sehingga kejutan dan getaran tidak langsung diterima oleh body/rangka.
2) Setelah kendaraan melewati permukaan jalan yang tidak rata gerakan ayunan pegas tetap akan berlangsung beberapa saat walaupun kendaraan telah melewati permukaan jalan yang tidak rata. Keadaan ini akan mengakibatkan pengendaraan tidak nyaman dan berbahaya.
Untuk mengatasi hal ini, peredam kejut atau (shock absorber) dipasangkan pada sistem suspensi, dimana peredam kejut akan bekerja menyerap kelebihan ayunan (osilasi) pegas sehingga pengendalian akan terasa stabil.
Oleh karenanya, unit sistem suspensi biasanya merupakan gabungan/kombinasi antara pegas dan peredam kejut.
2.3. Sistem Suspensi Depan (Front Suspension)
Jenis sistem suspensi depan yang umum digunakan pada sepeda motor diantaranya :
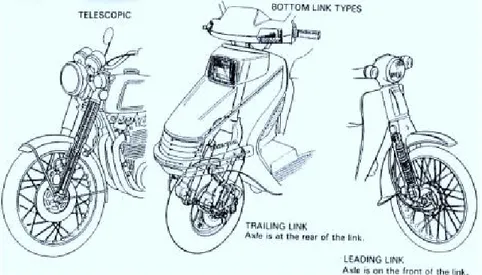
1) Suspensi Bottom Link/Pivoting Link, jenis ini dipergunakan pada sepeda motor tipe cub (Leading link) dan scooter (Trailing Link) model lama, dan belakangan ini sudah tidak begitu popular.
Keuntungan :
Pada saat pengereman, konstruksi link akan menaikkan bagian depan kendaraan, sehingga gejala kendaraan menukik akibat pengereman dapat diminimalisir.
Kerugian :
a) Adanya link dan engsel menyebabkan sistem suspensi ini memerlukan perawatan dan pelumasan rutin.
b) Keausan bushing pada bagian engsel link akan menyebabkan kedudukan roda miring terhadap sumbu geometrinya. Kurang nyaman digunakan pada kecepatan tinggi maupun off road. 2) Suspensi Telescopic, jenis ini paling banyak dipergunakan pada sepeda
motor CC kecil sampai dengan CC sedang. Keuntungan :
a) Tidak memerlukan perawatan ekstra seperti halnya pada sistem suspensi bottom link.
b) Kenyamanan dan keamanan pada kecepatan tinggi tetap terjaga. Kerugian :
Bagian depan kendaraan cenderung menukik pada saat pengereman, sehingga kemungkinan pengendara terjungkal pada saat pengereman mendadak lebih besar.
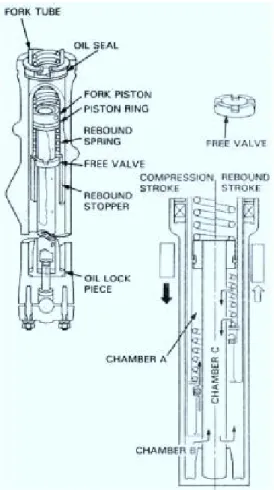
Gambar 2.4. Suspensi Depan Telescopic & Bottom Link 2.3.1. Telescopic Fork
Telescopic fork terdiri dari inner tube dan outer tube, ujung bagian bawah dari outer tube dipasang as roda depan dan ujung atas inner tube terpasang under bracket. Telescopic fork ditekan dan ditarik oleh gulungan pegas/coil spring dan oli. Sistem
ini mempunyai kekuatan yang sempurna dengan langkah peredam yang panjang sehingga mempunyai faktor peredam yang sangat besar.
Gambar 2.5 Bagian Dalam Suspensi Depan Telescopic Fork
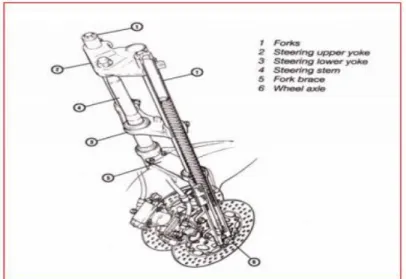
Suspensi teleskopik terdiri dari dua garpu (fork) yang dijepitkan pada steering
Gambar 2.6 Bagian Luar Suspensi Depan Telescopic Fork
Garpu teleskopik menggunakan penahan getaran pegas dan oli garpu. Pegas menampung getaran dari benturan roda dengan permukaan jalan dan oli garpu mencegah getaran diteruskan ke batang kemudi.
Gambar 2.7 Susunan komponen Telescopik Fork
Sistem suspensi depan jenis telescopic fork ini paling banyak digunakan pada sepeda motor jenis sport bike, moped dan scooter. Suspensi jenis ini bekerja berdasarkan pergerakan turun naik pipa garpu yang mendapat bantuan tekanan pegas dan sebagai fungsi damping (peredam) sistem. Suspensi telescopic fork ada dua tipe, yaitu Piston Slide Type dan Inner Spring Type.
1. Piston Slide Type
Piston dan slide metal bergerak dengan bagian tabung luar. Pada posisi ini,
kontak areanya kecil dan tekanan permukaannya tinggi. Pegasnya terpasang pada bagian luar dari inner tube. Dampernya ditempatkan pada celah antara inner tube dan
outer tube. Sesuai dengan hal itu, gaya redam untuk gaya menyamping lebih lemah
sehingga karakteristik damper mudah berubah dalam kondisi kerja berat dan limit langkahnya 150 mm. Tipe ini banyak digunaan pada model sport.
Gambar 2.8 Piston Slide Type Suspension 2. Inner Spring Type
Tipe ini dikembangkan oleh perusahaan Itali Ceriani. Bagian inner tube dan
outer tube meluncur saling berlawanan sehingga kontak area luas dan tekanan
permukaan rendah yang membuat faktor regiditas tinggi. Pegas terpasang dalam
inner tube dan dapat melentur dengan langkah yang panjang lebih dari 300 mm.
Letak damper independent, dibuat didalam inner tube, dengan sedikit peubahan karakteristik. Umumnya dipakai pada sepeda motor sport.
Untuk tipe yang sama, ada tipe yang menggunakan tempat luncuran piston dan letak damper yang independent dibawah outer tube. Konstruksi yang bervariasi ini, bergantung dari pabrik.
Gambar 2.9 Inner Spring Type Suspension 2.3.2. Prinsip Kerja Suspensi Telescopik
Prinsip kerja suspensi telescopic: a) Langkah Menekan (Kompresi)
Pada saat garpu telescopic (fork tube) bergerak pada posisi menekan (langkah kompresi), oli pada ruang B mengalir melalui lubang orifice pada pipa garpu menuju ruang C. Sementara itu, oli di dalam ruang B juga menekan free valve dan kembali ke atas menuju ruang A. Tahanan oli yang mengalir akan meredam gerakan kejut (shock absorber) pada saat gerakan menekan.
Untuk kejutan yang besar atau saat garpu mendekati tekanan yang maksimal, maka bagian bawah dari ujung garpu akan tersumbat oleh “oil
lock piece”, sehingga terjadi tahanan gerakan garpu secara hidrolis
sebelum garpu menyentuh bagian bawah.
b) Langkah Naik (Rebound)
pada langkah naik (rebound stroke), oli dalam ruang A mengalir menuju ruang C melalui lubang orifice yang berada pada bagian atas fork piston sehingga mengakibatkan tahanan aliran oli.
Tahanan oli tersebut akan berfungsi sebagai tenaga redam (damping
force) untuk mengontrol gerak naik pegas suspensi. Rebound spring akan
rebound yang lebih kuat. Pada saat tersebut terjadi aliran oli dari ruang C
menuju ruang B, melalui lubang orifice yang berada pada bagian bawah
piston fork.
Gambar 2.10 Konstruksi & Prinsip Kerja Suspensi Telescopic
2.4. Getaran Mekanik
Getaran adalah gerakan bolak-balik dalam suatu interval waktu tertentu. Getaran berhubungan dengan gerak osilasi benda dan gaya yang berhubungan dengan gerak tersebut. Semua benda yang mempunyai massa dan elastisitas mampu bergetar, jadi kebanyakan mesin dan struktur rekayasa (engineering) mengalami getaran sampai derajat tertentu dan rancangannya biasanya memerlukan pertimbangan sifat osilasinya.
Ada dua kelompok getaran yang umum yaitu : 1. Getaran bebas
Getaran bebas terjadi jika sistem berosilasi karena bekerjanya gaya yang ada dalam sistem itu sendiri (inherent), dan jika ada gaya luar yang bekerja. Sistem yang bergetar bebas akan bergerak pada satu atau lebih frekuensi naturalnya, yang merupakan sifat sistem dinamika yang dibentuk oleh distribusi massa dan kekuatannya. Semua sistem yang memiliki massa dan elastisitas dapat mengalami getaran bebas atau getaran yang terjadi tanpa rangsangan luar.
Dengan kata lain terjadi bila sistem mekanis dimulai dengan gaya awal, kemudian dibiarkan bergetar secara bebas. Contoh getaran seperti ini adalah memukul garpu tala dan membiarkannya bergetar, atau bandul yang ditarik dari keadaan setimbang lalu dilepaskan.
2. Getaran Paksa
Getaran yang terjadi karena rangsangan gaya luar, jika rangsangan tersebut berosilasi maka sistem dipaksa untuk bergetar pada frekuensi rangsangan. Jika frekuensi rangsangan sama dengan salah satu frekuensi natural sistem, maka akan didapat keadaan resonansi dan osilasi besar yang berbahaya mungkin terjadi. Kerusakan pada struktur besar seperti jembatan, gedung ataupun sayap pesawat terbang, merupakan kejadian menakutkan yang disebabkan oleh resonansi. Jadi perhitungan frekuensi natural merupakan hal yang utama.
Dengan kata lain terjadi bila gaya bolak-balik atau gerakan diterapkan pada sistem mekanis. Contohnya adalah getaran gedung pada saat gempa bumi. 2.4.1. Karateristik Getaran
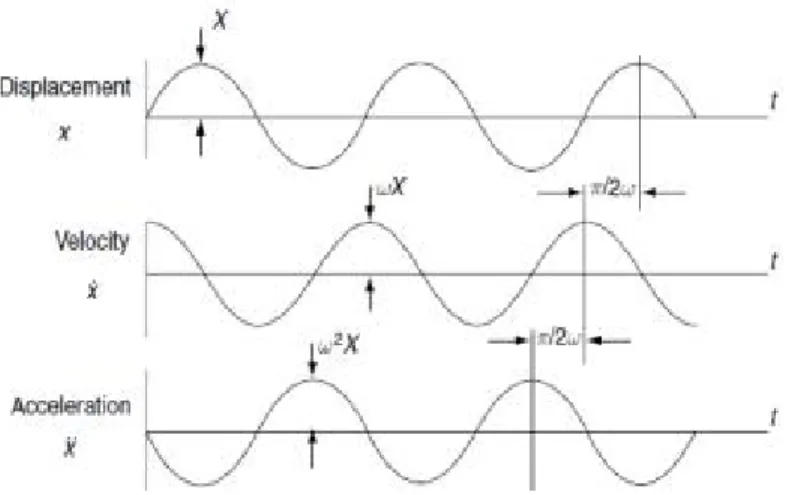
Getaran secara teknis didefenisikan sebagai gerak osilasi dari suatu objek terhadap posisi objek awal/diam, seperti yang ditunjukkan pada gambar 2.11. Gerakan massa dari posisi awal menuju atas dan bawah lalu kembali ke posisi
semula, dan akan melanjutkan geraknya disebut sebagai satu siklus getar. Waktu yang dibutuhkan untuk satu siklus disebut sebagai periode getaran. Jumlah siklus pada suatu selang waktu tertentu disebut sebagai frekuensi getaran.
Gambar 2.11 Sistem getaran sederhana
Frekuensi adalah salah satu karakteristik dasar yang digunakan untuk mengukur dan menggambarkan getaran. Karakteristik lainnya yaitu perpindahan, kecepatan dan percepatan. Setiap karakteristik ini menggambarkan tingkat getaran, hubungan karakteristik ini dapat dilihat pada gambar 2.12.
Perpindahan (displacement) mengindikasikan berapa jauh suatu objek bergetar, kecepatan (velocity) mengindikasikan berapa cepat objek bergetar dan percepatan (acceleration) suatu objek bergetar terkait dengan gaya penyebab getaran. 2.5. Pemodelan Sistem Dan Persamaan Yang Dikembangkan
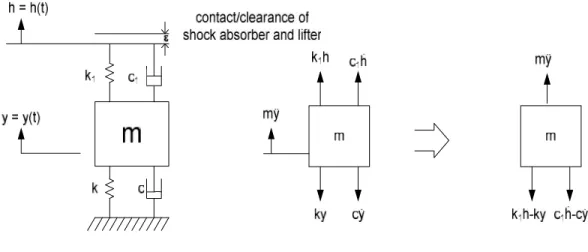
Dengan mengembangkan hukum ke-dua Newton (dapat diliht misalanya dalam referensi yang dikemukakan oleh Singiresu S Rao (2000), Robert W Vox(1994) maka sistem mekanik shock absorber dengan pengaruh gaya eksitasi dalam arah vertikal memiliki model 2-dof yang mana dapat diilustrasikan dalam gambar berikut :
Gambar 2.13 Model sistem mekenik 2-dof, shock absorber dengan pengaruh gaya eksitasi dalam arah rectilinear vertikal.
Dimana : h(t) = tinggi angkatan massa sistem shock absorber karena pengaruh gaya eksitasi lifter (source) dalam waktu t.
y (t) = osilasi perpindahan massa sistem shock absorber dalam waktu t m = massa total sistem shock absorber
k = stiffness coefficient shock absorber
k1= stiffness coefficient interaksi antara massa lifter dan shock absorber
pada batas contact atau clearance
c1 = viscositas damping (absorber/dashpot) coefficient. interaksi antara
massa lifter dan shock absorber pada batas contact atau
clearance
Dengan demikian dari gambar 2.13 dan sesuai dengan hukum Newton ke-2 diperoleh persamaan matematik sistem getaran massa shock absorber dalam arah vertikal yaitu :
̈ = ℎ̇ − ̇ + − ………..(2.1)
Atau
̈ + ̇ + = ℎ + ℎ̇ = ( )...(2.2)
Inertia Force Resistance Force Restoring Force Excitation Force
Gerakan Eccentric cam dan follower ring-nya sebagai sumber eksitasi shock
absorber untuk posisi-posisi titik mati atas (TMA) dan titik mati bawah (TMB)
sehingga diperoleh tinggi angkatan maksimum h = h max dapat diilustrasikan pada gambar berikut :
Gambar 2.14 Eccentric cam dan follower ring dari penggerak shock absorber pada posisi-posisi TMA (solit line) dan TMB (dashid line)
Sedangkan untuk mendapatkan tinggi ankatan shock absorber pada posisi perjalanan rotor dari TMA dengan sudut , dapat diilustrasikan gambar berikut :
Gambar 2.15 Eccentric Cam dan Follow Ring penggerak shock absorber
pada posisi sudut dari TMA
Dari gambar 2.15 dapat dilihat bahwa :
ℎ = − ( − cos )……….………….(2.3)
karena konstan maka dalam waktu t dari TMA diperoleh :
= …………..………..……..………...(2.4)
Sehingga dari persamaan (2.3) dan (2.4) :
ℎ = ℎ( ) = − ( − cos )……….………...………...(2.5)
= , …..…………..…...………..……….…(2.6) Dimana :
N = putaran rotor pada kondisi pembebanan, rpm = frekuensi eksitasi.
Dari persamaan (2.6) dan (2.4) diperoleh :
̈ + ̇ + = ( − ) + cos − sin ……….…………..….(2.7)
Persamaan (2.7) menunjukan suatu sistem getaran paksa dengan model 1-DOF (model 2-DOF direduksi kedalam model 1-DOF)
Dengan menuliskan :
= = ………..(2.8)
Dengan dan masing-masing disebut sebagai faktor redaman dan frekuensi
natural sistem.
Dari persamaan (2.7) dan (2.8) diperoleh :
̈ + ̇ + = ( − ) + cos − sin ………....(2.9)
Persamaan (2.8) dan (2.9) diturunkan berdasarkan respon kinematika dengan pengaruh faktor-faktor fleksibilitas dan redaman interaksi antara shock absorber dan lifter pada titik kontak/clearance-nya. Dalam hal ini secara dinamik koefisien k1dan
c1 masing-masing diberikan sebagai koreksi dari nilai k dan c dengan
memperhitungkan berbagai pengaruh link mekanisme dari lifter yang dapat ditransmisikan pada gerakan rectilinier vertikal sistem pegas massa shock absorber. seperti gaya-gaya sentrifugal dan tangensial dari Eccentric cam, ring follower; serta pengaruh gaya-gaya yang terjadi pada greaze seal dan batang penghubung dari sistem lifter tersebut. Secara ideal untuk tujuan pemodelan dapat diasumsikan bahwa k1 =k dan c1= c.
2.6. Redaman Viskos
Viskositas dapat dinyatakan sebagai tahanan aliaran fluida yang merupakan gesekan antara molekul–molekul cairan satu dengan yang lain. Suatu jenis cairan yang mudah mengalir dapat dikatakan memiliki viskositas yang rendah, dan sebaliknya bahan–bahan yang sulit mengalir dikatakan memiliki viskositas yang tinggi. Pada hukum aliran viskos, Newton menyatakan hubungan antara gaya – gaya mekanika dari suatu aliran viskos sebagai : Geseran dalam ( viskositas ) fluida
adalah konstan sehubungan dengan gesekannya. Hubungan tersebut berlaku untuk
fluida Newtonian, dimana perbandingan antara tegangan geser (s) dengan kecepatan geser (g) nya konstan. Parameter inilah yang disebuut dengan viskositas.
Pemodelan Piston Silnder Dashpot
Mengembangkan ekspresi untuk konstanta redaman dari dashpot yang ditunjukkan pada gambar 2.16(a)
Solusi: konstanta redaman dashpot dapat ditentukan dengan menggunakan persamaan tegangan geser untuk aliran cairan kental/kekentalan aliran dan tingkat persamaan aliran fluida. Seperti ditunjukkan pada gambar 2.16(a), dashpot terdiri dari piston diameter D dan panjang l, bergerak dengan kecepatan v0dalam silinder diisi dengan
cairan viskositas [1.24, 1.32]. biarkan jarak ruang antara piston dan dinding silinder menjadi d. Pada y jarak dari permukaan bergerak, biarkan kecepatan dan tegangan geser menjadi v dan , dan pada suatu jarak
Gambar 2.16 Dashpot
(y + dy) biarkan kecepatan dan tegangan geser menjadi (c - dv) dan ( + d ), masing-masing (lihat gambar 2.16b). tanda negatif untuk dv menunjukan bahwa kecepatan menurun saat bergerak menuju dinding silinder. Pada kekentalan ini berlaku pada cincin annular sama dengan
F= / = / ………....………...…….. (2.10)
Tapi tegangan geser diberikan oleh persamaan
Dimana tanda negatif konsisten dengan penurunan gradien kecepatan [1,33]. menggunakan pers. (2.10) kedalam Pers. (2.11), maka diperoleh :
F= − / ……….…………..…….. (2.12)
Gaya pada piston menyebabkan perbedaan tekanan pada ujung elemen, persamaan tekanan tersebut adalah :
= = ……….…..…… (2.13)
Dengan demikian kekuatan tekanan pada ujung elemen menjadi :
( ) = ………...……… (2.14)
( ) menunjukkan luasan annular antara y dan (y + dy).
Jika kita mengasumsikan kecepatan rata-rata seragam dalam arah gerakan fluida, maka gaya diberikan dalam Pers. (2.12) dan (2.14) harus sama. Sehingga diperoleh persamaan berikut :
4
= − /
Atau
= −
……..……… (2.15)Dengan melakukan integrasi persamaan ini dua kali dan menggunakan kondisi batas v = -vo pada y = 0 dan v = 0 pada y = d, kita peroleh
= − / ( − ) − 1 − ………...…… (2.16)
Laju aliran yang melintasi ruang sisa antara ring dan dinding silinder dapat diperoleh dengan mengintegrasikan laju aliran melintasi antara elemen dengan batasan yang y = 0 dan y = d, kita peroleh :
= ∫ = − ……….……..… (2.17) Volume dari cairan yang melintasi ruang sisa pembakaran per detik tergeser oleh piston. Oleh karena itu kecepatan piston akan sama dengan laju aliran ini dibagi dengan luas piston. Diperoleh :
Persamaan (2.17) dan (2.18) menjadi :
=
..………...(2.19)Dengan menulis gaya P = cv0, maka konstan redaman c menjadi :
= 1 + ………..…… (2.20)
2.7. Kekakuan Pegas ( Stiffness/Spring Rate )
=
( )……….……….(2.21)Dimana :
C = D/d ; C = konstanta redaman, D = diameter piston, d = jarak antara piston dan dinding silinder
6 = modulus kekakuan = modulus geser N = jumlah lilitan aktif
BAB III
METODOLOGI PENELITIAN
3.1. Waktu dan tempat penelitian
Penelitian ini dilaksanakan tanggal 20 Pebruari selama 2 minggu pada Lab. Pengujian Mesin Fakultas Teknik Universitas Pattimura
3.2. Variabel penelitian
Pengertian dari variabel bebas adalah merupakan variabel yang menjadi sebab timbulnya variable dependent (varibel terikat). Jadi variable independent adalah variabel yang mempengaruhi. Sedangkan pengertian dari variabel terikat adalah variabel yang di pengaruhi atau yang menjadi akibat karena adanya variabel bebas.
1. Variabel bebas : - Viskositasnya Absolut (µ)
- Densitas fluida( )
2. Variabel terikat : - x = Osilasi ( perpindahan)
- v = kecepatan osilasi
-
a
= percepatan osilasi 3.3. Alat dan Bahan Penelitian1) Alat :
Hand-held Analyzers Type 2250 Tachometer
Personal komputer
Alat uji shock absorber (Motor 1 phase 0,4 HP Ex.Wipro) Gelas ukur (100ml)
Botol sampel (11pcs) Jangka sorong
Micrometer
Bola peluru plastik (0,0584cm) Timbangan analog
Stopwacth 2) Bahan :
Oli shock absorber (Yamalube, Jumbo)
Telescopic Shock Absorber Yamaha Jupiter 135 CC
3.4 Metode Analisa Data
Setelah data yang diperoleh, selanjutnya adalah menganalisa data dengan cara mengolah data yang sudah terkumpul untuk mendapatkan nilai variasi campuran yang ditampilkan dalam bentuk grafik-grafik.
3.5 Mekanisme Percobaan
Gambar 3.2 Mekanisme Percobaan 3.6. Prosedur Percobaan
Prosedur dari penelitian ini dapat dijelaskan :
1. Menyiapkan alat dan bahan
2. Pemasangan Shock Absorber pada Alat uji
3. Melakukan pemasangan alat ukur pada Telescopik Shock Absorber 4. menyeting alat ukur Analyzer dengan ketentuan yang telah ditetapkan
5. menjalankan Alat uji dan Alat ukur Hend-helds Analyzer dengan selang waku 30 detik untuk pengambilan data.
6. Setelah pengambilan data, kemudian data di konfersi ke computer dengan menggunakan Software vibrasi BZ-5503, sehingga terbaca grafik
3.7. Diagram Alir
Agar penelitian dapat berjalan secara sistematis, maka diperlukan rancangan penelitian/langkah-langkah dalam penelitian. Adapun diagram alir penelitian sebagai berikut :
Gambar 3.3 Diagram Alir Penelitian Start Studi Pustaka Perumusan Masalah Desain Peralatan Penguraian Data Pengujian Perhitungan EFISIENSI Analisa Dan Pembahasan
Kesimpulan
Stop
NO
BAB IV
HASIL DAN PEMBAHASAN
4.1 HASIL
4.1.1. Karkteristik respon frekuensi Yamalube Oil dalam bentuk (Peak-Peak) untuk Displacement, Velocity, dan Acceleration
hasil eksperimen redaman dengan Yamalube yakni ; 50.6 (g/ml) dengan selang waktu 30 detik, memperlihatkan perubahan respon frekuensi (Perpindahan, Kecepatan, dan Percepatan) pada Gambar (4.1) dan Gambar (4.2).
2k 4k 6k 8k 10k 12k 14k 16k 18k 20k [Hz] 60 80 100 120 140 160 [dB re 1pm]
Displacement Cursor values
X: 10.05 kHz FFT: 78.5 dB re 1pm
Gambar 4.1 Grafik nilai-nilai karakteristik respon frekuensi Yamalube Oil
dalam bentuk (RMS) untuk Displacement, Velocity, dan
Acceleration 2k 4k 6k 8k 10k 12k 14k 16k 18k 20k [Hz] 100 120 140 160
[dB re 1nm/s] Velocity Cursor valuesX: 10.05 kHz FFT: 114.5 dB re 1nm/s 2k 4k 6k 8k 10k 12k 14k 16k 18k 20k [Hz] 130 140 150 160 170
[dB re 1µm/s²] Acceleration Cursor valuesX: 10.05 kHz FFT: 150.4 dB re 1µm/s²
Gambar 4.2 Grafik nilai-nilai karkteristik respon frekuensi Yamalube Oil dalam bentuk (Peak-Peak) untuk Displacement, Velocity, dan
Acceleration 2k 4k 6k 8k 10k 12k 14k 16k 18k 20k [Hz] 60 80 100 120 140 160 180 [dB re 1pm]
Displacement Cursor values
X: 10.05 kHz FFT: 87.5 dB re 1pm 2k 4k 6k 8k 10k 12k 14k 16k 18k 20k [Hz] 100 120 140 160
[dB re 1nm/s] Velocity Cursor valuesX: 10.05 kHz
FFT: 123.5 dB re 1nm/s 2k 4k 6k 8k 10k 12k 14k 16k 18k 20k [Hz] 140 150 160 170 180
[dB re 1µm/s²] Acceleration Cursor valuesX: 10.05 kHz
Sebagai mana terlihat pada gambar 4.1 dan 4.2. Bahwa respon frekuensi yang terjadi dalam bentuk (RMS dan Peak-Peak) pada perlakuan Yamalube Oil, mempunyai perbedaan terhadap Displacement, velocity, dan Acceleration.
4.1.2 Hasil Karakteristik Respon Frekuensi Untuk Perlakuan Jumbo Oil Dalam Bentuk (RMS dan Peak-Peak)
Hasil eksperimen Jumbo yakni ; 45.0 (g/ml) dengan selang waktu 30 detik,
memperlihatkan perubahan respon frekuensi (Perpindahan, Kecepatan, dan
Percepatan) pada Gambar (4.3) dan Gambar (4.4)
2k 4k 6k 8k 10k 12k 14k 16k 18k 20k [Hz] 80 120 160 200
[dB re 1pm] Displacement Cursor valuesX: 10.05 kHz FFT: 73.9 dB re 1pm 2k 4k 6k 8k 10k 12k 14k 16k 18k 20k [Hz] 100 120 140 160 180 200
[dB re 1nm/s] Velocity Cursor valuesX: 10.05 kHz FFT: 109.9 dB re 1nm/s
Gambar 4.3 Grafik nilai-nilai karakteristik respon frekuensi Jumbo Oil dalam bentuk (RMS) untuk Displacement, Velocity, dan Acceleration 2k 4k 6k 8k 10k 12k 14k 16k 18k 20k [Hz] 140 150 160 170 180 190 [dB re 1µm/s²]
Acceleration Cursor values
X: 10.05 kHz FFT: 145.9 dB re 1µm/s² 2k 4k 6k 8k 10k 12k 14k 16k 18k 20k [Hz] 80 120 160 200
[dB re 1pm] Displacement Cursor valuesX: 10.05 kHz FFT: 83.0 dB re 1pm
Gambar 4.4 Grafik nilai-nilai karakteristik respon frekuensi Jumbo Oil dalam bentuk (Peak-Peak) untuk Displacement, Velocity, dan
Acceleration
Sebagai mana terlihat pada gambar 4.3 dan 4.4 Bahwa respon getaran yang terjadi dalam bentuk (RMS dan Peak-Peak) pada perlakuan Jumbo Oil mempunyai perbedaan terhadap Displacement, velocity, dan Acceleration.
2k 4k 6k 8k 10k 12k 14k 16k 18k 20k [Hz] 120 140 160 180 200
[dB re 1nm/s] Velocity Cursor valuesX: 10.05 kHz FFT: 118.9 dB re 1nm/s 2k 4k 6k 8k 10k 12k 14k 16k 18k 20k [Hz] 150 160 170 180 190 200
[dB re 1µm/s²] Acceleration Cursor valuesX: 10.05 kHz FFT: 154.9 dB re 1µm/s²
4.1.3 Hasil Karakteristik Respon Frekuensi Untuk Perlakuan Ke-1 Dalam Bentuk (RMS dan Peak-Peak)
Hasil eksperimen dengan memvariasikan campuran oli redaman Yamalube dan Jumbo yakni ; 46.1 (g/ml) dengan selang waktu 30 detik, memperlihatkan perubahan respons getaran (Perpindahan, Kecepatan, dan Percepatan) pada Gambar (4.5) dan Gambar (4.6) 2k 4k 6k 8k 10k 12k 14k 16k 18k 20k [Hz] 20 40 60 80 100 120
[dB re 1pm] Displacement Cursor valuesX: 10.05 kHz
FFT: 32.9 dB re 1pm 2k 4k 6k 8k 10k 12k 14k 16k 18k 20k [Hz] 60 80 100 120
[dB re 1nm/s] Velocity Cursor valuesX: 10.05 kHz FFT: 68.9 dB re 1nm/s
Gambar 4.5 Grafik nilai-nilai karakteristik respon frekuensi perlakuan Ke-1 dalam bentuk (RMS) untuk Displacement, Velocity, dan
Acceleration 2k 4k 6k 8k 10k 12k 14k 16k 18k 20k [Hz] 90 100 110 120 130 [dB re 1µm/s²]
Acceleration Cursor values
X: 10.05 kHz FFT: 104.9 dB re 1µm/s² 2k 4k 6k 8k 10k 12k 14k 16k 18k 20k [Hz] 20 40 60 80 100 120 140
[dB re 1pm] Displacement Cursor valuesX: 10.05 kHz
Gambar 4.6 Grafik nilai-nilai karakteristik respon frekuensi perlakuan ke-1 dalam bentuk (Peak-Peak) untuk Displacement, Velocity, dan
Acceleration.
Sebagai mana terlihat pada gambar 4.5 dan 4.6 Bahwa respon getaran yang terjadi dalam bentuk (RMS dan Peak-Peak) pada perlakuan ke-1 dengan variasi campuran oli redaman yang sama, mempunyai perbedaan terhadap Displacement,
velocity, dan Acceleration.
2k 4k 6k 8k 10k 12k 14k 16k 18k 20k [Hz] 60 80 100 120 [dB re 1nm/s]
Velocity Cursor values
X: 10.05 kHz FFT: 77.9 dB re 1nm/s 2k 4k 6k 8k 10k 12k 14k 16k 18k 20k [Hz] 100 110 120 130 140
[dB re 1µm/s²] Acceleration Cursor valuesX: 10.05 kHz FFT: 113.9 dB re 1µm/s²
4.2 Pembahasan
Dari hasil karakteristik getaran respon frekuensi untuk 1050 (Hz) pada setiap perlakuan dapat diperoleh RMS (Root Mean Square) dan Peak-Peak mengalami perubahan simpangan akibat tahanan fluida karena kekentalan dapat dilihat pada grafik berikut:
Gambar 4.7 Grafik Karakteristik getaran untuk FFT dalam bentuk (RMS)
Data yang diperoleh dari penelitian adalah getaran respon frekuensi dari tiap-tiap perlakuan. Kemudian data dari pengaruh fluida dibuat dalam bentuk grafik. Berdasarkan grafik yang diperoleh tersebut menunjukan bahwa pada perlakuan dalam bentuk RMS (Root mean Square). Untuk RMS dalam perlakuan Displacement didapatkan FFT (Fast Fourier Transform) pada fluida jumbo oil dengan frekuensi 1050 Hz (frekuensi input dari alat ukur) sebesar 73,9 m, untuk perlakuan dalam bentuk Velocity sebesar 109.9 m/s dan perlakuan dalam bentuk Acceleration sebesar 145.9 m/s2. Sedangkan pada fluida yamalube oil dengan frekuensi yang sama unuk
0 50 100 150 200 Jumbo oil 73.9 4.2 Pembahasan
Dari hasil karakteristik getaran respon frekuensi untuk 1050 (Hz) pada setiap perlakuan dapat diperoleh RMS (Root Mean Square) dan Peak-Peak mengalami perubahan simpangan akibat tahanan fluida karena kekentalan dapat dilihat pada grafik berikut:
Gambar 4.7 Grafik Karakteristik getaran untuk FFT dalam bentuk (RMS)
Data yang diperoleh dari penelitian adalah getaran respon frekuensi dari tiap-tiap perlakuan. Kemudian data dari pengaruh fluida dibuat dalam bentuk grafik. Berdasarkan grafik yang diperoleh tersebut menunjukan bahwa pada perlakuan dalam bentuk RMS (Root mean Square). Untuk RMS dalam perlakuan Displacement didapatkan FFT (Fast Fourier Transform) pada fluida jumbo oil dengan frekuensi 1050 Hz (frekuensi input dari alat ukur) sebesar 73,9 m, untuk perlakuan dalam bentuk Velocity sebesar 109.9 m/s dan perlakuan dalam bentuk Acceleration sebesar 145.9 m/s2. Sedangkan pada fluida yamalube oil dengan frekuensi yang sama unuk
Jumbo oil yamalube oil
73.9 78.5
109.9 114.5
145 150.4
Displacement Velocity Acceleration
4.2 Pembahasan
Dari hasil karakteristik getaran respon frekuensi untuk 1050 (Hz) pada setiap perlakuan dapat diperoleh RMS (Root Mean Square) dan Peak-Peak mengalami perubahan simpangan akibat tahanan fluida karena kekentalan dapat dilihat pada grafik berikut:
Gambar 4.7 Grafik Karakteristik getaran untuk FFT dalam bentuk (RMS)
Data yang diperoleh dari penelitian adalah getaran respon frekuensi dari tiap-tiap perlakuan. Kemudian data dari pengaruh fluida dibuat dalam bentuk grafik. Berdasarkan grafik yang diperoleh tersebut menunjukan bahwa pada perlakuan dalam bentuk RMS (Root mean Square). Untuk RMS dalam perlakuan Displacement didapatkan FFT (Fast Fourier Transform) pada fluida jumbo oil dengan frekuensi 1050 Hz (frekuensi input dari alat ukur) sebesar 73,9 m, untuk perlakuan dalam bentuk Velocity sebesar 109.9 m/s dan perlakuan dalam bentuk Acceleration sebesar 145.9 m/s2. Sedangkan pada fluida yamalube oil dengan frekuensi yang sama unuk
perlakuan Displacement sebesar 78.5 m, untuk perlakuan dalam bentuk Velocity 114.5 m/s, dan perlakuan dalam bentuk Acceleration seberas 150.4 m/s2.
Gambar 4.8. Grafik karakteristik getaran untuk FFT dalam bentuk (Peak-Peak)
Hasil getaran respon frekuensi dari tiap-tiap perlakuan dari fluida dibuat dalam bentuk grafik. Berdasarkan grafik yang diperoleh tersebut menunjukan bahwa perlakuan untuk Peak-Peak dalam bentuk Displacement didapatkan FFT (Fast
Fourier Transform) pada fluida jumbo oil dengan frekuensi 1050 Hz (frekuensi input
dari alat ukur) sebesar 83.0 m, untuk perlakuan dalam bentuk Velocity sebesar 118.9 m/s dan perlakuan dalam bentuk Acceleration sebesar 154.9 m/s2. Sedangkan pada fluida yamalube oil dengan frekuensi yang sama unuk perlakuan Displacement sebesar 87.5 m, untuk perlakuan dalam bentuk Velocity 123.5 m/s, dan perlakuan dalam bentuk Acceleration seberas 197.5 m/s2.
0 50 100 150 200 Jumbo oil 83 118.9 154.9
perlakuan Displacement sebesar 78.5 m, untuk perlakuan dalam bentuk Velocity 114.5 m/s, dan perlakuan dalam bentuk Acceleration seberas 150.4 m/s2.
Gambar 4.8. Grafik karakteristik getaran untuk FFT dalam bentuk (Peak-Peak)
Hasil getaran respon frekuensi dari tiap-tiap perlakuan dari fluida dibuat dalam bentuk grafik. Berdasarkan grafik yang diperoleh tersebut menunjukan bahwa perlakuan untuk Peak-Peak dalam bentuk Displacement didapatkan FFT (Fast
Fourier Transform) pada fluida jumbo oil dengan frekuensi 1050 Hz (frekuensi input
dari alat ukur) sebesar 83.0 m, untuk perlakuan dalam bentuk Velocity sebesar 118.9 m/s dan perlakuan dalam bentuk Acceleration sebesar 154.9 m/s2. Sedangkan pada fluida yamalube oil dengan frekuensi yang sama unuk perlakuan Displacement sebesar 87.5 m, untuk perlakuan dalam bentuk Velocity 123.5 m/s, dan perlakuan dalam bentuk Acceleration seberas 197.5 m/s2.
yamalube oil 87.5
123.5 154.9
197.5
Displacement Velocity Acceleration
perlakuan Displacement sebesar 78.5 m, untuk perlakuan dalam bentuk Velocity 114.5 m/s, dan perlakuan dalam bentuk Acceleration seberas 150.4 m/s2.
Gambar 4.8. Grafik karakteristik getaran untuk FFT dalam bentuk (Peak-Peak)
Hasil getaran respon frekuensi dari tiap-tiap perlakuan dari fluida dibuat dalam bentuk grafik. Berdasarkan grafik yang diperoleh tersebut menunjukan bahwa perlakuan untuk Peak-Peak dalam bentuk Displacement didapatkan FFT (Fast
Fourier Transform) pada fluida jumbo oil dengan frekuensi 1050 Hz (frekuensi input
dari alat ukur) sebesar 83.0 m, untuk perlakuan dalam bentuk Velocity sebesar 118.9 m/s dan perlakuan dalam bentuk Acceleration sebesar 154.9 m/s2. Sedangkan pada fluida yamalube oil dengan frekuensi yang sama unuk perlakuan Displacement sebesar 87.5 m, untuk perlakuan dalam bentuk Velocity 123.5 m/s, dan perlakuan dalam bentuk Acceleration seberas 197.5 m/s2.
4.2.1 Analisa Pengaruh Fluida terhadap karakteristik getaran respon frekuensi pada Perlakuan 1-9 untuk (RMS dan Peak-Peak).
Dari hasil karakteristik getaran respon frekuensi untuk 1050 (Hz) pada perlakuan 1-9 dapat diperoleh RMS (Root Mean Square) dan Peak-Peak mengalami perubahan simpangan akibat tahanan fluida karena kekentalan dapat dilihat pada grafik berikut:
Gambar 4.9. Grafik Karakteristik getaran untuk perlakuan ke 1-9 pada
FFT dalam bentuk (RMS)
Dari grafik diatas dapat dilihat bahwa nilai karakteristik amplitudo pada perlakuan pertama dalam bentuk RMS untuk Displacement sebesar 32.9 m, Velocity sebesar 68.9 m/s, dan Acceleration sebesar 104.9 m/s2. Pada perlakuan ke-dua mengalami kenaikan amplitudo untuk Displacement sebesar 35.0 m, Velocity sebesar 71.0 m/s, dan Acceleration sebesar 107.0 m/s2. Perlakuan ke-tiga untuk Displacement sebesar 36.2 m, Velocity sebesar 72.2 m/s, dan Acceleration sebesar 108.2 m/s2. Pada perlakuan ke-empat mengalami penurunan amplitudo untuk Displacement sebesar 31.8 m, Velocity sebesar 67.2 m/s, dan Acceleration sebesar 103.7 m/s2. Kemudian
0 50 100 150 I II 32.9 35 68.9 71 104.9 107
4.2.1 Analisa Pengaruh Fluida terhadap karakteristik getaran respon frekuensi pada Perlakuan 1-9 untuk (RMS dan Peak-Peak).
Dari hasil karakteristik getaran respon frekuensi untuk 1050 (Hz) pada perlakuan 1-9 dapat diperoleh RMS (Root Mean Square) dan Peak-Peak mengalami perubahan simpangan akibat tahanan fluida karena kekentalan dapat dilihat pada grafik berikut:
Gambar 4.9. Grafik Karakteristik getaran untuk perlakuan ke 1-9 pada
FFT dalam bentuk (RMS)
Dari grafik diatas dapat dilihat bahwa nilai karakteristik amplitudo pada perlakuan pertama dalam bentuk RMS untuk Displacement sebesar 32.9 m, Velocity sebesar 68.9 m/s, dan Acceleration sebesar 104.9 m/s2. Pada perlakuan ke-dua mengalami kenaikan amplitudo untuk Displacement sebesar 35.0 m, Velocity sebesar 71.0 m/s, dan Acceleration sebesar 107.0 m/s2. Perlakuan ke-tiga untuk Displacement sebesar 36.2 m, Velocity sebesar 72.2 m/s, dan Acceleration sebesar 108.2 m/s2. Pada perlakuan ke-empat mengalami penurunan amplitudo untuk Displacement sebesar 31.8 m, Velocity sebesar 67.2 m/s, dan Acceleration sebesar 103.7 m/s2. Kemudian
III IV V VI VII VIII
36.2 31.8 34.4 39.9 33.7 34.9
77.8
71 72.2 67.2 70.4 75.9 69.7 70.8
107 108.2 103.7 106.4 111.9 105.6 106.8
Displacement Velocity Acceleration
4.2.1 Analisa Pengaruh Fluida terhadap karakteristik getaran respon frekuensi pada Perlakuan 1-9 untuk (RMS dan Peak-Peak).
Dari hasil karakteristik getaran respon frekuensi untuk 1050 (Hz) pada perlakuan 1-9 dapat diperoleh RMS (Root Mean Square) dan Peak-Peak mengalami perubahan simpangan akibat tahanan fluida karena kekentalan dapat dilihat pada grafik berikut:
Gambar 4.9. Grafik Karakteristik getaran untuk perlakuan ke 1-9 pada
FFT dalam bentuk (RMS)
Dari grafik diatas dapat dilihat bahwa nilai karakteristik amplitudo pada perlakuan pertama dalam bentuk RMS untuk Displacement sebesar 32.9 m, Velocity sebesar 68.9 m/s, dan Acceleration sebesar 104.9 m/s2. Pada perlakuan ke-dua mengalami kenaikan amplitudo untuk Displacement sebesar 35.0 m, Velocity sebesar 71.0 m/s, dan Acceleration sebesar 107.0 m/s2. Perlakuan ke-tiga untuk Displacement sebesar 36.2 m, Velocity sebesar 72.2 m/s, dan Acceleration sebesar 108.2 m/s2. Pada perlakuan ke-empat mengalami penurunan amplitudo untuk Displacement sebesar 31.8 m, Velocity sebesar 67.2 m/s, dan Acceleration sebesar 103.7 m/s2. Kemudian
VIII IX 77.8 70.8 113.8 106.8 149.8
pada perlakuan ke-lima kembali terjadi kenaikan Displacement sebesar 34.4 m,
Velocity sebesar 70.4 m/s, Acceleration sebesar 106.4 m/s2. Pada perlakuan ke-enam
Displacement sebesar 39.9 m, Velocity sebesar 75.9 m/s, Acceleration sebesar 111.9
m/s2. Pada perlakuan ke-tujuh kembali terjadi penurunan Displacememnt sebesar 33.7 m, Velocity sebesar 69.7 m/s, dan Acceleration sebesar 105.6 m/s2. Pada perlakuan ke-delapan terjadi kenaikan untuk Displacement sebesar 34.9, Velocity sebesar 70.8 m/s, dan Acceleration sebesar 106.8 m/s2. Pada perlakuan ke-sembilan amplitudo untuk Displacement sebesar 77.8 m, Velocity sebesar 113.8 m/s, dan Acceleration sebesar 149.8 m/s2.
Gambar 4.10. Grafik Karakteristik getaran untuk perlakuan ke 1-9 pada
FFT dalam bentuk (Peak-Peak)
Dari grafik diatas dapat dilihat bahwa nilai karakteristik amplitudo pada perlakuan pertama dalam bentuk RMS untuk Displacement sebesar 42.0 m, Velocity sebesar 77.9 m/s, dan Acceleration sebesar 113.9 m/s2. Pada perlakuan ke-dua mengalami kenaikan amplitudo untuk Displacement sebesar 44.0 m, Velocity sebesar
0 20 40 60 80 100 120 140 160 I II 42 44 77.9 80 113.9 116
pada perlakuan ke-lima kembali terjadi kenaikan Displacement sebesar 34.4 m,
Velocity sebesar 70.4 m/s, Acceleration sebesar 106.4 m/s2. Pada perlakuan ke-enam
Displacement sebesar 39.9 m, Velocity sebesar 75.9 m/s, Acceleration sebesar 111.9
m/s2. Pada perlakuan ke-tujuh kembali terjadi penurunan Displacememnt sebesar 33.7 m, Velocity sebesar 69.7 m/s, dan Acceleration sebesar 105.6 m/s2. Pada perlakuan ke-delapan terjadi kenaikan untuk Displacement sebesar 34.9, Velocity sebesar 70.8 m/s, dan Acceleration sebesar 106.8 m/s2. Pada perlakuan ke-sembilan amplitudo untuk Displacement sebesar 77.8 m, Velocity sebesar 113.8 m/s, dan Acceleration sebesar 149.8 m/s2.
Gambar 4.10. Grafik Karakteristik getaran untuk perlakuan ke 1-9 pada
FFT dalam bentuk (Peak-Peak)
Dari grafik diatas dapat dilihat bahwa nilai karakteristik amplitudo pada perlakuan pertama dalam bentuk RMS untuk Displacement sebesar 42.0 m, Velocity sebesar 77.9 m/s, dan Acceleration sebesar 113.9 m/s2. Pada perlakuan ke-dua mengalami kenaikan amplitudo untuk Displacement sebesar 44.0 m, Velocity sebesar
III IV V VI VII VIII
45.3 40.8 43.4 49 42.7 43.7
81.2 76.8 79.4 85 78.7 79.9
116 117.2 112.8 115.4 120.9 114.7 115.8
Displacement Velocity Acceleration
pada perlakuan ke-lima kembali terjadi kenaikan Displacement sebesar 34.4 m,
Velocity sebesar 70.4 m/s, Acceleration sebesar 106.4 m/s2. Pada perlakuan ke-enam
Displacement sebesar 39.9 m, Velocity sebesar 75.9 m/s, Acceleration sebesar 111.9
m/s2. Pada perlakuan ke-tujuh kembali terjadi penurunan Displacememnt sebesar 33.7 m, Velocity sebesar 69.7 m/s, dan Acceleration sebesar 105.6 m/s2. Pada perlakuan ke-delapan terjadi kenaikan untuk Displacement sebesar 34.9, Velocity sebesar 70.8 m/s, dan Acceleration sebesar 106.8 m/s2. Pada perlakuan ke-sembilan amplitudo untuk Displacement sebesar 77.8 m, Velocity sebesar 113.8 m/s, dan Acceleration sebesar 149.8 m/s2.
Gambar 4.10. Grafik Karakteristik getaran untuk perlakuan ke 1-9 pada
FFT dalam bentuk (Peak-Peak)
Dari grafik diatas dapat dilihat bahwa nilai karakteristik amplitudo pada perlakuan pertama dalam bentuk RMS untuk Displacement sebesar 42.0 m, Velocity sebesar 77.9 m/s, dan Acceleration sebesar 113.9 m/s2. Pada perlakuan ke-dua mengalami kenaikan amplitudo untuk Displacement sebesar 44.0 m, Velocity sebesar
VIII IX 86.8 79.9 122.8 115.8 158.8
80.0 m/s, dan Acceleration sebesar 116.0 m/s2. Perlakuan ke-tiga untuk Displacement sebesar 45.3 m, Velocity sebesar 81.2 m/s, dan Acceleration sebesar 117.2 m/s2. Pada perlakuan ke-empat mengalami penurunan amplitudo untuk Displacement sebesar 40.8 m, Velocity sebesar 76.8 m/s, dan Acceleration sebesar 112.8 m/s2. Kemudian pada perlakuan ke-lima kembali terjadi kenaikan Displacement sebesar 43.4 m,
Velocity sebesar 79.4 m/s, Acceleration sebesar 115.4 m/s2. Pada perlakuan ke-enam
Displacement sebesar 49.0 m, Velocity sebesar 85.0 m/s, Acceleration sebesar 120.9
m/s2. Pada perlakuan ke-tujuh kembali terjadi penurunan Displacememnt sebesar 42.7 m, Velocity sebesar 78.7 m/s, dan Acceleration sebesar 114.7 m/s2. Pada perlakuan ke-delapan terjadi kenaikan untuk Displacement sebesar 43.7, Velocity sebesar 79.9 m/s, dan Acceleration sebesar 115.8 m/s2. Pada perlakuan ke-sembilan amplitudo untuk Displacement sebesar 86.8 m, Velocity sebesar 122.8 m/s, dan Acceleration sebesar 158.8 m/s2.
Dari grafik RMS dan Peak-Peak diatas untuk perlakuan terhadap Jumbo Oil dan Yamalube Oil diketahui bahwa pada kedua grafik terjadi kenaikan nilai FFT, dan untuk perlakuan kombinasi campuran 1-9 terjadi penurunan nilai FFT pada perlakuan ke-4 relatif kecil. Maka dari grafik tersebut dapat dibuat kesimpulan bahwa semakin kecil nilai FFT yang didapat maka semakin baik redaman yang diberikan oleh shock
absorber. Karena pada saat shock absorber diberi beban terhadap tahanan dalam
fluida atau energi yang diakitbatkan pada pergerakan pegas sebagian sudah terserap oleh fluida.
BAB V
KESIMPULAN DAN SARAN 5.1 Kesimpulan
Dari hasil penelitian eksperimental perlakuan berbagai variasi campuran dan tanpa campuran oli redaman Shock absorber dengan melihat pengaruh getaran respon frekuensi dalam bentuk FFT line/spectrum pada RMS (Root Mean Square) dan
Peak-Peak, untuk (displacement, velocity, dan acceleration), dan pengukuran dilakukaan
dalam selang waktu 30 detik. Dapat ditarik kesimpulan sebagai berikut :
1. Berdasarkan grafik yang didapat dari hasil penelitian dapat diketahui bahwa karakteristik getaran respon frekuensi, dimana FFT frekuensinya adalah 1050 Hz terhadap fluida Yamalube oil untuk RMS yakni ; (Displacement : 78.5 dB re 1pm , Velocity : 114.5 dB re 1nm/s, Acceleration : 150.4 dB re 1 / ) dan Peak-Peak yakni ; (Displacement : 87.5 dB re 1pm, Velocity
: 123.5 dB re 1nm/s, Acceleration : 197.5 dB re 1 / ). Jumbo oil untuk
RMS yakni ; (Displacement : 73.9 dB re 1pm , Velocity : 109.9 dB re 1nm/s,
Acceleration : 145.9 dB re 1 / ) dan Peak-Peak yakni ; (Displacement
: 83.0dB re 1pm, Velocity : 118.9 dB re 1nm/s, Acceleration : 154.9 dB re
1 / ).
2. Berdasarkan grafik yang didapat dari hasil penelitian dapat diketahui pula kombinasi oli table 3.1 (27ml+37ml) dengan redaman yang baik dengan simpangan relatif kecil adalah pada perlakuan ke-4 untuk RMS yakni ; (Displacement : 31.8 dB re 1pm , Velocity : 67.2 dB re 1nm/s, Acceleration
: 103.7 dB re 1 / ) dan Peak-Peak yakni ; (Displacement : 40.8 dB re
1pm, Velocity : 76.8 dB re 1nm/s, Acceleration : 112.8 dB re 1 / ).
5.2 Saran
Dari penelitian ini disarankan :
1. Untuk penelitian selanjutnya tentang getaran dari Shock absorber diharapkan dapat mengambil RPM yang lebih rendah putarannya untuk mengetahui respon dari getaran.
2. Untuk mengetahui karakteristik getaran Shock absorber secara lebih akurat, maka analisa getaran respon frekuensi penelitian ini sebaiknya dilanjutkan kedalam respon waktu.
DAFTAR PUSTAKA
Aburass et al. Investigation of the Effect of Biodiesel Blends on Fuel Injection Pumps
based on Vibration and Pressure Measurements. 2014.
Bhushan, B., ed., Handbook of Micro/Nano Tribology, Boca Raton, Fla., 1999.
Budio Sugeng P,. Buku Ajar Dinamika Sturktur. Fakultas Teknik, Jurusan Teknik Sipil. Universitas Brawijaya. 2010.
Carlucci et al,. Block Vibration As Indicator Of Combustion Behaviour In A Direct
Injection Diesel Engine. 2005.
Chan Jefri, Diktat Getaran Mekanik. Universitas Darma Persada.
Headdquarters, Sound & Vibration Measurement Technical Documentation,
Denmark, Bruel & Kjaer. 2010.
Ishihama et al. “Camshaft Drive Torque Measuring Device Built in a Chain Sprockt”. 2010.
Khovakh, M. Motor Vehicle Engines, MIR Publisher, Moscow, 1979.
Koster, M.p., Vibration of Cam Mechanisms, Macmillan, London, 1970.
Kovacs, G. T. A.,. Micromachined Transducers Sourcebook, WCB McGraw-Hill, Boston, 1998.
Madou, M., Fundenmental of Microvabrication, CRC Press, Boca Raton., Fla., 1998.
Mitchel, D, B., “Tests On Dynamic Response Of cam-Followers-Systems,” Mechanical Engineering, June 1950.
Petersen., K., “Silico as a Mechanical Material,” Proceeding of thr IEEE, 1982.
Rothbart, H., “Cam Dynamics”Proc. Int. Conference Mechanisms, conn, 1961.
Shigley, J., and Mischke, C., Standart Handbook of Machine Design, Chap 18, D. Curtis, McGraw-Hill, New York, 1996.
Szakallas, L. E., and Savage, M., “The Characterization of Cam drive System
Windup, “ Trans, ASME., J. Mech. Des., 102, 1980.
Yipeng et al. Study on vibration control methods of Diesel engine fuel injection
system. Beijing, China, 2014.
Zhiqiang Wang. “Study On Fault Diagnosis Of Fuel Injection Based On Vibration