BAB I
PENDAHULUAN
1.1 Latar Belakang
Sistem kontrol atau kendali saat ini mulai bergeser pada otomatisasi sistem kontrol yang menuntut penggunaan komputer, sehingga campur tangan manusia dalam pengontrolan sangat kecil. Bila dibandingkan dengan pengerjaan secara manual, sistem peralatan yang dikendalikan oleh komputer akan memberikan keuntungan dalam hal efisiensi, keamanan, dan ketelitian. Kemampuan komputer, baik perangkat keras (hardware) maupun perangkat lunak (software), dapat dimanfaatkan untuk berbagai aplikasi pengendalian, seperti pengendalian suhu.
Peranan elektronika disegala bidang menjadi semakin besar diabad ini. Bermula dari penerapan rangkaian elektronika analog, kemudian digital dan kini hampir semua peralatan menggunakan sistem mikroprosesor , misalnya; perangkat yang dekat dengan kita, seperti handphone, televisi, , mesin cuci sampai ke instrumen ruang angkasa. Dalam belajar tentang teknik listrik dan elektronika kita pastinya menemukan tentang sistem kendali dan bagaimana sebenarnya tentang jalannya sistem kendali/kontrol, tapi dalam makalah ini saya hanya menjelaskan sedikit tentang sistem kendali/kontrol. Makalah ini saya susun untuk lebih memahami bagaimana sebenarnya sistem kendali/kontrol ini dan untuk mengetahui bagaimana cara kerja suatu sistem kendali/kontrol tersebut serta bentuk penerapannya.
1.2 Tujuan
1. Mengetahui gerbang logika dan lajabar Boolean 2. Mengetahui umpan balik elektronika
3. Mengetahui Mikrokontroller
1.3 Manfaat
1. Praktikan dapat Mengetahui gerbang logika dan lajabar Boolean 2. Praktikan dapat Mengetahui umpan balik elektronika
3. Praktikan dapat Mengetahui Mikrokontroller
BAB II
PELAKSANAAN PRAKTIKUM
2.1 Objek 1 (
Gerbang – Gerbang Logika Dan Aljabar Boolean)
2.1.1 Tujuan Praktikum
Adapun tujuan praktikum dari objek satu ini adalah :
Dapat menyelesaikan persamaan operasi Boolean serta membuat rangkaian logika menggunakan transistor serta membuat table kebenaran.
2.1.2 Manfaat Praktikum
Praktikan dapat menyelesaikan persamaan operasi Boolean serta membuat rangkaian logika menggunakan transistor serta membuat table kebenaran.
2.1.3 Tinjauan Pustaka
Gerbang logika merupakan rangkaian yang memiliki satu atau lebih sinyal masukan tapi hanya memiliki satu sinyal keluaran. Sinyal ini hanya dikenal dalam dua kondisi yaitu 1 dan 0, yang diartikan sebagai hidup dan mati, tinggi dan rendah, atau benar dan salah.
Macam-macam Gerbang Logika 1. Gerbang AND
Gambar 1. Simbol gerbang AND
Sumber : http://mata-cyber.blogspot.co.id/2014/06/pengertian-gerbang-logika-dan-macam-macam-gerbang-logika.html
salah satu masukan atau semua masukan bernilai 0 maka
output nya 0. Berikut tabel kebenaran dari AND GATE :
Tabel 1. Gerbang AND
INPUT A INPUT B OUTPUT Y
0 0 0
0 1 0
1 0 0
1 1 1
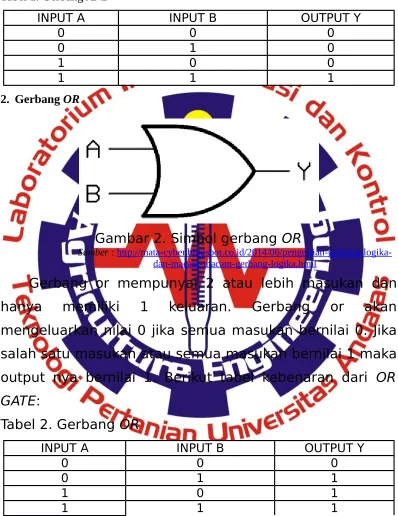
2. Gerbang OR
Gambar 2. Simbol gerbang OR
Sumber : http://mata-cyber.blogspot.co.id/2014/06/pengertian-gerbang-logika-dan-macam-macam-gerbang-logika.html
Gerbang or mempunyai 2 atau lebih masukan dan
hanya memiliki 1 keluaran. Gerbang or akan
mengeluarkan nilai 0 jika semua masukan bernilai 0. Jika
salah satu masukan atau semua masukan bernilai 1 maka
output nya bernilai 1. Berikut tabel kebenaran dari OR
GATE:
Tabel 2. Gerbang OR
INPUT A INPUT B OUTPUT Y
0 0 0
0 1 1
1 0 1
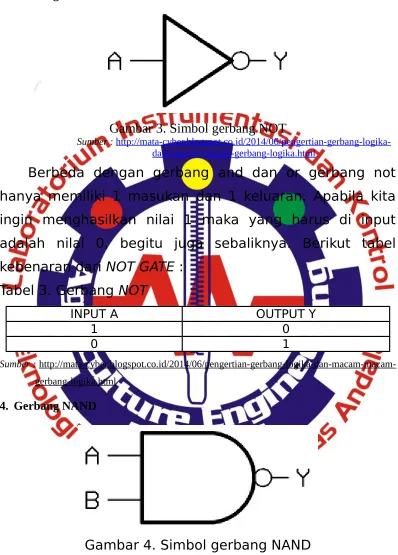
3. Gerbang NOT
Gambar 3. Simbol gerbang NOT
Sumber : http://mata-cyber.blogspot.co.id/2014/06/pengertian-gerbang-logika-dan-macam-macam-gerbang-logika.html
Berbeda dengan gerbang and dan or gerbang not
hanya memiliki 1 masukan dan 1 keluaran. Apabila kita
ingin menghasilkan nilai 1 maka yang harus di input
adalah nilai 0, begitu juga sebaliknya. Berikut tabel
kebenaran dari NOT GATE :
Tabel 3. Gerbang NOT
INPUT A OUTPUT Y
1 0
0 1
Sumber : http://mata-cyber.blogspot.co.id/2014/06/pengertian-gerbang-logika-dan-macam-macam-gerbang-logika.html
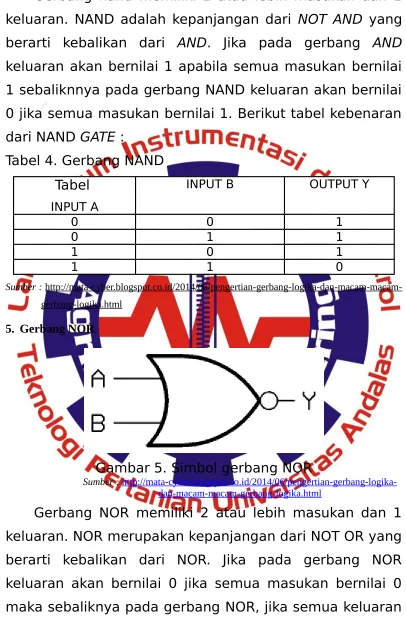
4. Gerbang NAND
Gambar 4. Simbol gerbang NAND
Gerbang nand memiliki 2 atau lebih masukan dan 1
keluaran. NAND adalah kepanjangan dari NOT AND yang
berarti kebalikan dari AND. Jika pada gerbang AND
keluaran akan bernilai 1 apabila semua masukan bernilai
1 sebaliknnya pada gerbang NAND keluaran akan bernilai
0 jika semua masukan bernilai 1. Berikut tabel kebenaran
dari NAND GATE :
Tabel 4. Gerbang NAND
Tabel
INPUT A
INPUT B OUTPUT Y
0 0 1
0 1 1
1 0 1
1 1 0
Sumber : http://mata-cyber.blogspot.co.id/2014/06/pengertian-gerbang-logika-dan-macam-macam-gerbang-logika.html
5. Gerbang NOR
Gambar 5. Simbol gerbang NOR
Sumber : http://mata-cyber.blogspot.co.id/2014/06/pengertian-gerbang-logika-dan-macam-macam-gerbang-logika.html
bernilai 0 maka keluaran akan bernilai 1. Berikut tabel
kebenaran NOR GATE :
Tabel 5. Gerbang NOR
INPUT A INPUT B OUTPUT Y
0 0 1
0 1 0
1 0 0
1 1 0
Sumber : http://mata-cyber.blogspot.co.id/2014/06/pengertian-gerbang-logika-dan-macam-macam-gerbang-logika.html
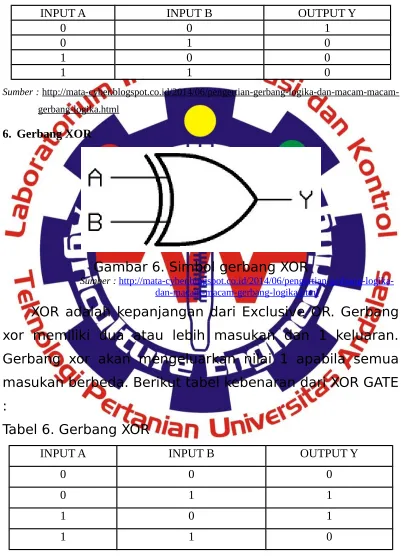
6. Gerbang XOR
Gambar 6. Simbol gerbang XOR
Sumber : http://mata-cyber.blogspot.co.id/2014/06/pengertian-gerbang-logika-dan-macam-macam-gerbang-logika.html
XOR adalah kepanjangan dari Exclusive OR. Gerbang
xor memiliki dua atau lebih masukan dan 1 keluaran.
Gerbang xor akan mengeluarkan nilai 1 apabila semua
masukan berbeda. Berikut tabel kebenaran dari XOR GATE
:
Tabel 6. Gerbang XOR
INPUT A INPUT B OUTPUT Y
0 0 0
0 1 1
1 0 1
Sumber : http://mata-cyber.blogspot.co.id/2014/06/pengertian-gerbang-logika-dan-macam-macam-gerbang-logika.html
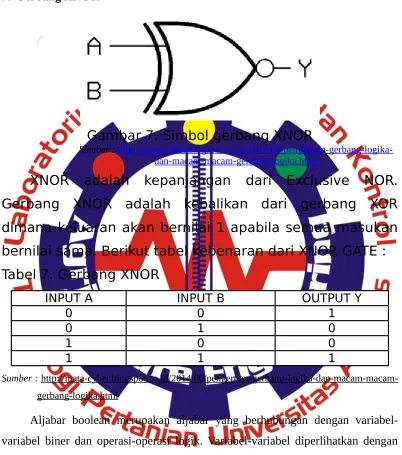
7. Gerbang XNOR
Gambar 7. Simbol gerbang XNOR
Sumber : http://mata-cyber.blogspot.co.id/2014/06/pengertian-gerbang-logika-dan-macam-macam-gerbang-logika.html
XNOR adalah kepanjangan dari Exclusive NOR.
Gerbang XNOR adalah kebalikan dari gerbang XOR
dimana keluaran akan bernilai 1 apabila semua masukan
bernilai sama. Berikut tabel kebenaran dari XNOR GATE :
Tabel 7. Gerbang XNOR
INPUT A INPUT B OUTPUT Y
0 0 1
0 1 0
1 0 0
1 1 1
Sumber : http://mata-cyber.blogspot.co.id/2014/06/pengertian-gerbang-logika-dan-macam-macam-gerbang-logika.html
dinyatakan dalam tabel kebenaran. Suatu tabel kebenaran untuk fungsi boolean merupakan daftar semua kombinasi angka-angka biner 0 dan 1 yang diberikan ke variabel-variabel biner dan daftar yang memperlihatkan nilai fungsi untuk masing-masing kombinasi biner.
Aljabar boolean mempunyai 2 fungsi berbeda yang saling berhubungan. Dalam arti luas, aljabar boolean berarti suatu jenis simbol-simbol yang ditemukan oleh George Boole untuk memanipulasi nilai-nilai kebenaran logika secara aljabar. Dalam hal ini aljabar boolean cocok untuk diaplikasikan dalam komputer
Definisi Aljabar Boolean
Misalkan terdapat :
Dua operator biner : + ( OR ) dan ( AND)
Sebuah operator uner : ’.
B : himpunan yang didefinisikan pada opeartor +,, dan ’
0 dan 1 adalah dua elemen yang berbeda dari B.
Untuk mempunyai sebuah aljabar Boolean, harus diperlihatkan: 1. Elemen-elemen himpunan B,
3. Memenuhi postulat Huntington.
Aljabar Boolean Dua-Nilai
Aljabar Boolean dua-nilai:
B = {0, 1}
operator biner, + dan operator uner, ’
Kaidah untuk operator biner dan operator uner:
A b a b a B a + b A a’
0 0 0 0 0 0 0 1
0 1 0 0 1 1 1 0
1 0 0 1 0 1
1 1 1 1 1 1
Cek apakah memenuhi postulat Huntington: 1. Closure : jelas berlaku
2. Identitas: jelas berlaku karena dari tabel dapat kita lihat bahwa: (i) 0 + 1 = 1 + 0 = 1
(ii) 1 0 = 0 1 = 0
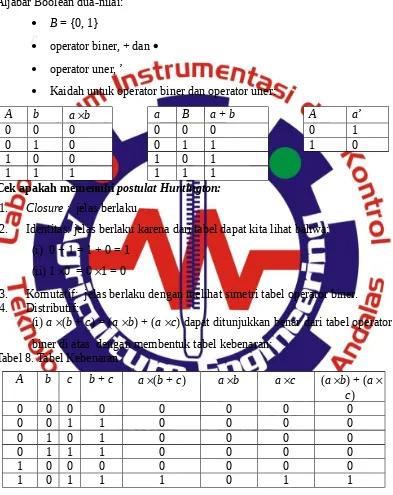
3. Komutatif: jelas berlaku dengan melihat simetri tabel operator biner. 4. Distributif:
(i) a (b + c) = (ab) + (ac) dapat ditunjukkan benar dari tabel operator biner di atas dengan membentuk tabel kebenaran:
Mengevaluasi Ekspresi Boolean
Contoh: a’ (b + c)
jika a = 0, b = 1, dan c = 0, maka hasil evaluasi ekspresi: 0’ (1 + 0) = 1 1 = 1
Dua ekspresi Boolean dikatakan ekivalen (dilambangkan dengan ‘=’) jika keduanya mempunyai nilai yang sama untuk setiap pemberian nilai-nilai kepada n peubah.
a . (b + c) = (a . b) + (a .c)
2.1.4 Metoda Praktikum
2.1.4.1 Alat dan Bahan
Alat dan bahan yang digunakan adalah : 1. Transistor NPN C 1061
2. Papan rangkaian 3. Resistor
4. Kabel
5. Saklar ON-OFF 6. Tool Kit Elektronik 7. Adaptor
8. Multimeter
2.1.4.2 Prosedur Kerja
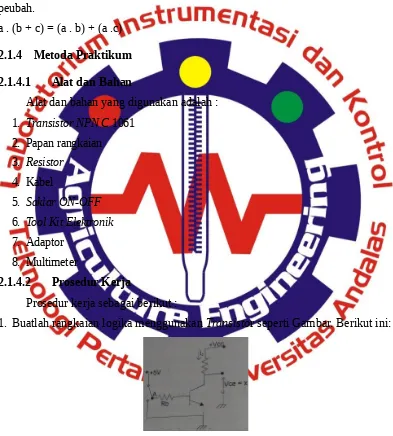
Prosedur kerja sebagai berikut :
1. Buatlah rangkaian logika menggunakan Transistor seperti Gambar. Berikut ini:
Gambar 8. Rangkaian Gerbang Logika
Sumber : Modul Praktikum
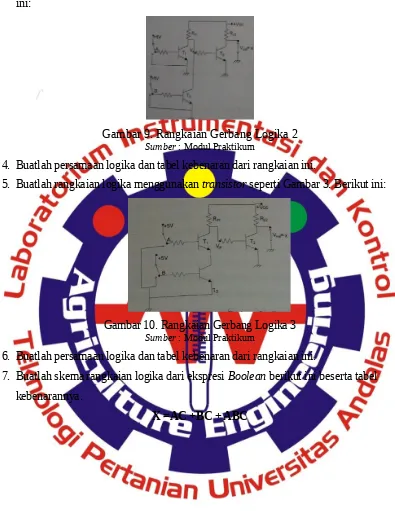
3. Buatlah rangkaian logika menggunakan Transistor seperti Gambar 2.berikut ini:
Gambar 9. Rangkaian Gerbang Logika 2
Sumber : Modul Praktikum
4. Buatlah persamaan logika dan tabel kebenaran dari rangkaian ini.
5. Buatlah rangkaian logika menggunakan transistor seperti Gambar 3. Berikut ini:
Gambar 10. Rangkaian Gerbang Logika 3
Sumber : Modul Praktikum
6. Buatlah persamaan logika dan tabel kebenaran dari rangkaian ini.
7. Buatlah skema rangkaian logika dari ekspresi Boolean berikut ini beserta tabel kebenarannya.
2.1.5 Hasil
Gambar 11. Rangkaian Gerbang Logika 1
Sumber : Hasil Praktikum
Gambar 12. Rangkaian Gerbang Logika 3
Sumber : Hasil Praktikum
2.1.6 Pembahasan
logika NOT maka hasil output nya adalah Off atau sama dengan 0. Pda rangkaian yang pertama karena memiliki input satu maka penggunaan logika Not. Not merupakan invers dari input tersebut maka didapatkan.
Pada rangkaian 1 terdapat input On sehingga jika menggunakan logika Not maka hasil output nya adalah Off yang berarti mati atau dalam angka sama dengan 0. Pada rangkaian ketiga menggunakan logika Or yaitu A+B. maka dari rangkaian tersebut didapat input A merupakan On samadengan 1 dan B sama dengan On yaitu 1 jika menggunakan logika OR maka hasil nya adalah On yaitu 1setelah itu hasil yang didapatkan lalu di NOT kan maka hasil yang didapatkan adlah Off atau sama dengan 0.
Pada pembuatan rangkaian yaitu dengan rumus X =AC +BC + ABC pertama menggunakan logika AND dengan C jika input semua masa maka hasil A.C adalah On atau sama dengan 1, pada BC menggunakan logika AND dengan terlebih dahulu B di NOT kan maka hasil yang didapatkan Off yaitu 0, pada ABC dilakukan logika AND juga dengan A di Not kan terlebih dahulu mak didapatkan hasil input yaitu Off atau 0. Setelah selesai hasil tersebut lalu dilakukan logika OR maka didapatkan asil logika On atau 1 dengan keadaan lampu hidup.
2.1.7 Penutup 21.1.7 Kesimpulan
Kesimpulan dari praktikum objek 1 ini kita dapat mengetahui system-sistem logika yang dipakai dalam proses pemprograman secara otomatis. Berdasarkan hasil diatas maka jika On yaitu 1 dan Off yaitu 0. Dari hasil persamaan diatas didapatkan nilai input yaitu On dengan menggunakan logika tertentu.\
2.1.7.2 Saran
Saran untuk praktikum selanjutnya agar lebih memperhatikan dan memahami tentang sistem control sehingga dapat menerapkan dalam kerja maupun dalam kehidupan sehari-hari.Diharapkan praktikan lebih serius dalam menjalani praktikum tersebut.
Adapun tujuan praktikum dari objek dua ini adalah :
Memberikan pengetahuan tentang dasar – dasar pengontrolan dan perancangan system control umpan balik dengan perangkat elektronik.
2.2.2 Manfaat Praktikum
Praktikan dapat Memberikan pengetahuan tentang dasar – dasar pengontrolan dan perancangan system control umpan balik dengan perangkat elektronik.
2.2.3 Tinjauan Pustaka
Sistem pengendalian (sistem control) merupakan sekumpulan peralatan yang bekerja sama dengan tujuan untuk mengendalikan sesuatu. peralatan peralatan tersebut biasanya merupakan komponen komponen elektronik. Sebagai contohnya pada kapal modern, kapal tersebut dipasangi dengan peralatan sensor yang berfungsi untukmengetahui kondisi mesin induk. sensor sensor itu bekerja kemudian memberikan laporan kepada komputer yang terpasang di control room kapal.komputer kemudian menghitung kebutuhan bahan bakar mesin dan waktu ignition dari bahan bakar sehingga akan menghasilkan unjuk kerja yang maksimal. Untuk bisa merancang , mendiagnosis serta memperbaiki maka seorang ahli sistem kontrol harus menguasai ilmu elektronika, ilmu mekanika. Secara umum dalam sebuah system control terdapat 4 komponen, yaitu:
kombinasi atau kumpulan dari berbagai komponen yang bekerja secara bersama-sama untuk mencapai tujuan tertentu.
Gambar 13. Alur sebuah sistem
Sumber : http://wangready.wordpress.com/2011/04/04/pingsensor-jarak-ultrasonik/
Jenis-jenis Sistem Kendali (Kontrol)
Sistem Kendali Manual
jarak-ultrasonik/ Sistem Kendali Otomatis
Sistem kendali otomatis adalah sistem kendali dimana manusia tidak menjadi bagian dari sistem kendali. Peran manusia digantikan oleh sistem kontroler yang telah diprogram secara otomatis sesuai fungsinya, sehingga bisa memerankan seperti yang dilakukan manusia. Di dunia industri modern banyak sekali sistem kendali yang memanfaatkan kontrol otomatis, apalagi untuk industri yang bergerak pada bidang yang prosesnya membahayakan keselamatan jiwa manusia.
Gambar 15. Sistem Kendali Otomatis
Sumber : http://wangready.wordpress.com/2011/04/04/pingsensor-jarak-ultrasonik/
Sistem Kontrol adalah seperangkat komponen yang saling berhubungan/dihubungkan sedemikian sehingga mampu memerintah, mengarahkan, atau mengatur dirinya sendiri atau sistem/proses yang lain.
Kontrol automatic atau yang dikenal dengan sistem pengendalian otomatis (automatic control system) merupakan level ke 2 dalam hirarki sistem otomasi..Dalam sistem otomasi kegiatan pengontrolan dan monitoring yang biasa dilakukan manusia bisa digantikan perannya dengan menerapkan prinsip otomasi. Kegiatan kontrol yang dilakukan secara berulang-ulang, kekurang presisi-an manusia dalam membaca data, serta resiko yang mungkin timbul dari sistem yang dikontrol semakin menguatkan kedudukan alat/mesin untuk melakukan pengontrolan secara otomatis.
disebut control engineering, control system engineering. Dengan berkembangnya teknologi komputer dan jaringan dimana konsep sistem otomasi dapat diwujudkan, ditambah dengan suatu kecerdasan melalui program yang ditanamkan dalam sistem tersebut , maka akan semakin meringankan tugas-tugas manusia. Derajat otomasi yang makin tinggi akan mengurangi peranan dan meringankan tugas-tugas manusia dalam pengontrolan suatu proses.
Sistem Pengendalian Umpan Maju (Open Loop Control)
Open loop control atau kontrol lup terbuka adalah suatu sistem yang keluarannya tidak mempunyai pengaruh terhadap aksi kontrol. Artinya, sistem kontrol terbuka keluarannya tidak dapat digunakan sebagai umpan balik dalam masukan.
Gambar 16. Sistem Pengendalian Umpan Maju
Sumber : http://wangready.wordpress.com/2011/04/04/pingsensor-jarak-ultrasonik/
Sistem kendali lup terbuka atau umpan maju (feedforward control) umumnya mempergunakan pengatur (controller) serta aktuator kendali (control actuator) yang berguna untuk memperoleh respon sistem yang baik. Sistem kendali ini keluarannya tidak diperhitungkan ulang oleh controller. Suatu keadaan apakah plant benar-benar telah mencapai target seperti yang dikehendaki masukan atau referensi, tidak dapat mempengaruhi kinerja kontroler.
Karakteristik Sistem kendali lup terbuka :
output tidak diukur maupun di umpanbalikkan
bergantung pada kalibrasi
hubungan antara output dan input diketahui
tidak ada ‘internal disturbance’ maupun ‘eksternal disturbance’
terkait dengan waktu Kelebihan:
tidak ada persoalan kestabilan Kelemahan:
gangguan dan perubahan kalibrasi
untuk menjaga kualitas yang diinginkan perlu kalibrasi ulang dari waktu ke waktu
Contoh :
- kendali traffic (lalu lintas) - mesin cuci
Sistem Kendali Umpan Balik (Close Loop Control)
Close loop control atau kontrol lup tertutup adalah sistem kontrol yang sinyal keluarannya mempunyai pengaruh langsung pada aksi pengontrolan. Sinyal kesalahan penggerak, yang merupakan selisih antara sinyal masukan dan sinyal umpan balik (yang dapat berupa sinyal keluaran atau suatu fungsi sinyal keluaran atau turunannya, diumpankan ke kontroler untuk memperkecil kesalahan dan membuat agar keluaran sistem mendekati harga yang diinginkan. Dengan kata lain, istilah “lup tertutup” berarti menggunakan aksi umpan – balik untuk memperkecil kesalahan sistem.
Gambar 17. Sistem Kendali Umapan Balik
Sumber : http://wangready.wordpress.com/2011/04/04/pingsensor-jarak-ultrasonik/
Jika dalam hal ini manusia bekerja sebagai operator, maka manusia ini akan menjaga sistem agar tetap pada keadaan yang diinginkan, ketika terjadi perubahan pada sistem maka manusia akan melakukan langkah – langkah awal pengaturan sehingga sistem kembali bekerja pada keadaan yang diinginkan. Ciri-ciri Sistem Kendali Tertutup
• Lebih kompleks
• Harga yang lebih mahal • Lebih dapat dipercaya • Biasanya lebih akurat
Gambar 18. Sistem Kendali Digital
Sumber : http://wangready.wordpress.com/2011/04/04/pingsensor-jarak-ultrasonik/
Sistem Kendali Kontinyu
Sistem pengendalian yang ber jalan secara kontinyu, pada setiap saat respon sistem selalu ada. Pada gambar, Sinyal e(t) yang masuk ke kontroler dan sinyal m(t) yang keluar dari kontroler adalah sinyal kontinyu.
Gambar 19. Sistem Kendali Kontinyu
Sumber : http://wangready.wordpress.com/2011/04/04/pingsensor-jarak-ultrasonik/
Sistem Kendali Diskrit
Gambar 20. Sistem Kendali Diskrit
Sumber : http://wangready.wordpress.com/2011/04/04/pingsensor-jarak-ultrasonik
2.2.4 Metoda Praktikum
2.2.4.1 Alat dan Bahan
Alat dan bahan yang digunakan adalah : 1. Sensor Dioda IN4148, NTC
2. Op-Amp MC 1458, Transistor C 1061
3. Papan Rangkaian, Resistor, Kapasitor dan kabel 4. Tool Kit Elektronik
5. Relay 12 V
6. Unit Pemanas Listrik 350 watt 7. Adaptor
8. Potensiometer
9. Multimeter dan thermometer 10. Ruang kaca ukuran kecil 2.2.4.2 Prosedur Kerja
Prosedur kerja sebagai berikut :
1. Rangkailah sensor diode silicon IN 4148 seperti Gambar 19. Berikut ini
Gambar 21. Rangkaian Sensor Suhu
Sumber : Modul Praktikum
Gambar 22. Penguat inverting
Sumber : Modul Praktikum
3. Atur faktor penguat dengan menggunakan Potensiometer P3 sedangkan P1 pada Gambar 5 dipergunakan sebagai pengatur Tegangan acuan. Jika harus konstan mengalir melalui bias maju diode, maka penuruna tegangan yang terdapat pada kedua ujung diode adalah berbanding terbalik terhadap suhu perubahan Va yang terjadi adalah kira – kira 2 mV perderajat celcius. Potensiometer P2 berfungsi untuk membuat keluaran Vb = 0, sedangkan potensio P3 berfungsi untuk membuat Vb max.
4. Dari kedua gabungan rangkaian tersebut, ujilah dan buatlah tabel hubungan antara suhu yang diterima oleh diode dengan tegangan Vb.
5. Buatlah rangkaian system saklar seperti pada gambar 21. Berikut ini:
Gambar 23. Rangkaian system Saklar
Sumber : Modul Praktikum
2.2.5 Hasil
Tabel 9. Data Rangkaian Saklar
NO ON OFF
1 4.06 2.06
2 1.04 0.89
3 4.17 1.83
4 1.8 1.42
5 2.49 1.18
6 2.64 2.27
Sumber : Analisis Praktikum
Gambar 24. Rangkaian Gerbang Logika 3
Sumber : Hasil Praktikum
2.2.6 Pembahasan
Berdasarkan hasil data yang didapatkan bahwa rangkaian Saklar adalah nama yang diberikan untuk alat yang berhubungan dengan listrik. Saklar adalah pemutus dan penyambung aliran arus listrik. Komponen listrik ini sengaja dirancang untuk memiliki dua keadaan, yaitu keadaan menutup, yaitu keadaan tertutup (terhubung) dan keadaan terbuka (tidak terhubung). Dua keadaan tersebut dapat diganti-ganti sehinga rangkaian dapat diubah dari terbuka menjadi tertutup, atau sebaliknya, sesuai dengan keinginan kita.
Rangkaian listrik dapat diubah menjadi rangkaian terbuka atau tertutup dengan membuka atau menutup saklar. Jika saklar ditutup (terbentuk rangkaian tertutup), arus listrik akan mengalir dalam rangkaian. Sebaliknya, jika saklar dibuka (terbentuk rangkaian terbuka), arus listrik berhenti mengalir. Jadi, fungsi saklar adalah sebagai alat pemutus dan penyambung arus listrik pada rangkaian. Penguat ini dinamakan penguat inverting karena masukan dari penguat tersebut adalah masukan non inverting dari Op Amp. Sinyal keluaran yang dihasilkan oleh penguat jenis ini sefasa dengan sinyal masukannya. Rangkaian suhu digunakan untuk mengetahui nesar kecilnya sushu pada pengukuran tersebut sebagai sensor pendeteksi suhu dapa ruang tertentu. Berdasarkan rangkaian mengenai saklar tersebut terdapat beberapa sistem yaitu ON dan ON, ON dan OFF,OFF dan ON serta OFF dan OFF. Dengan memilibeda beda apabila diperkecil dan diperbesar nilai voltase yang cecil maka diperbesar dan jika voltasenya besar maka volnya diperbesar. Hasil data terserbut terlampil pada tabel tersebut.
2.2.7 Penutup 2.2.7.1 Kesimpulan
2.2.7.2 Saran
Saran untuk praktikum selanjutnya agar lebih memperhatikan dan memahami tentang sistem control saklar,inverting dan control suhusehingga dapat menerapkan dalam kerja maupun dalam kehidupan sehari-hari. Diharapkan praktikan lebih serius dalam menjalani praktikum tersebut.
2.3 Objek 3 ( PEMBELAJARAN PEMPROGRAMAN BAHASA MICROKONTROLER)
2.3.1 Tujuan Praktikum
Adapun tujuan praktikum dari objek dua ini adalah:
1) Memahami struktur penulisan bahasa assembly
4) Mengenal Macro serta Licking kr file Library
5) Mampu membuat program bahasa assembly yang tersruktur.
2.3.2 Manfaat Praktikum
Praktikan dapat :
1. Memahami struktur penulisan bahasa assembly
2. Memahami cara pengalokasian memory baik untuk program maupun data
3. Dapat meng- kcompile source code assembly
4. Mengenal Macro serta Licking kr file Library
5. Mampu membuat program bahasa assembly yang tersruktur.
2.3.3 Tinjauan Pustaka
Bahasa Assembly atau Rakitan diprakarsaioleh IBM pada tahun 1956 – 1963. Bahasa assembly termasuk bahasa tingkat rendah. Pada tahun 1957, ukuran luas daerah yang menyebabkan kelainan program dalam assembler.
Untuk file yang diakhiri dengan extension Com, berarti file itu paling akan memakan luas 64 kilobyte yang disebut 1 segment, sedangkan untuk file berekstensi EXE tidak dibatasi berapa segment yang dapat dipakai. Dapat 1 segment, 2segment, 3 segment atau lebih dari 3 segment. Oleh karena COM hanya memiliki 1 segment, Maka file Com memiliki kelebihan dan kekurangan sebagai berikut :
a. Stack yang telah dibuat sendiri oleh program di akhir Segment
b. Hanya terdapat satu segment, sehingga tidak perlu mengatur DS, CS, SS, kecuali bila diinginkan.
d. Butuh ruangan di awal program sebanyak 100 hexa byte untuk keperluan program segment prefix (PSP).
e. Karena PSP diketahui dengan pasti, maka perlu dilakukan operasi ke PSP lebih
f. mudah karena masih berada dalam 1 segment.
g. Dapat menggunakan utility DEBUG untuk membuat program Kelebihan dan kekurangan program EXE, sebagai berikut :
Hasil Program panjang
Tidak perlu menyediakan tempat untuk PSP. Pembagian segmen diatur sendiri
Membuat stack sendiri
Tidak dapat membuat program dengan Debug.
Dalam pemrograman bahasa assembly lebih ditekankan pada system operasi Microsoft Intel yang seiring dengan perkembangan mikroprosesor 808 8/8086. Perkembangan bahasa assembly tergantung pada linker yang menguba h file *.obj menjadi *.exe atau *.com. Bahasa assembly dikategorikan sebaga i bahasa tingkat rendah. Hal ini untuk menggambarkan spesifikasi sebagai bahasa yang berorientasi pada machine dependent. Untuk membandingkan bahasa mesin dan bahasa assembly menurut karakteristik dibagi 2 bagian :
Mnemonic Operation Code Simbolic Operand Spesification
SKEMA ASSEMBLY
Proses penerjemahan secara sederhana dapat dikelompokkan dalam dua fase, yaitu:
Fase Analisa
b. Memasukkan symbol yang ditemukan pada label field dan alamat yang dituju machine word ke dalam symbol table.
c. Melakukan validasi mneoMic operation code dengan melihat pada mnemonic table
d. Menentukan alamat yang dibutuhkan oleh statement berdasarkan pada mnemonic operation code dan operand field pada statement.
Fase analisis
Dapat dikelompokkan menjadi beberapa tahap, yaitu : a. Lexical Analisys
Lexical Analisys adalah menjalankan mikro level examination dari teks masukan untuk mengenal lexial unit yang ada didalamnya dan menentukan kategori syntax.
Proses semantic analisys dapat diklasifikasikan kedalam proses declarative statement dan proses eksekusi.
Fase Syntesis
a. Menghasilkan machine operation code yang berkorespodensi dengan mnemonic operation code yang telah dicari pada mnemonic table. b. Menghasilkan alamat operand dari symbol table
c. Melakukan syntesis instruksi machine.
opcode field. Evaluasi korespodensi pengalamatan dilakukan untuk operand expression ‘ Result + 4.
PROSES ASSEMBLY
Unit dalam sources program digunakan untuk menterjemah semua bagian program.Ketika fase analisys statement program pertama kali dilakukan, maka proses LCakan dikerjakan dan symbol yang didefinisikan dalam program dimasukkan ke dalamsymbol table. Untuk mengurangi pengulangan, maka hasil analisis sources statement dari first pass direpresentasikan dalam internal form pada sources statement yangdisebut intermediate code. Selain membentuk intermediate code, suatu prosesassembler juga membangun struktur database yang digunakan oleh subsequent pass.
SPESIFIKASI KOMPUTER
Dalam pemrograman bahasa assembly, ada beberapa aspek utama yang minimalharus ada persyaratan yang menunjang, meliputi :
1) Perangkat Keras (Hardware) yang diperlukan:
Prosesor Intel, minimal Intel Pentium I, Intel Pentium II dan Pentium III Monitor CGA, EGA atau VGA
Keyboard dan Mouse USB Port
Harddisk
2) Perangkat Lunak (Software) yang diperlukan : Microsoft Windows XP
Turbo Assembler
Linker : Tlink ver 3 minimal
Text Editor : Edit atau bahasa pemrograman
Program yang dihasilkan memiliki kecepatan yang paling baik. Kelebihan dari bahasa rakitan adalah :
1. Memiliki fasilitas fungsi dan makro (ciri khas bahasa pemrograman yangmenyebabkan pemrograman menjadi lebih mudah).
2. Program dapat dibuat secara modular (dipecah dalam modul-modul kecil dandapat diintegrasikan kembali).
3. Ukuran program lebih kecil, sehingga lebih menghemat media penyimpan.Lebih dekat ke hardware sehingga seluruh kemampuan komputer dapatdimanfaatkan secara maksimal.
Bahasa rakitan merupakan bahasa pemrograman yang posisinya di antara bahasapemrograman lainnya adalah termasuk dalam bahasa pemrograman tingkat rendah karenabahasa ini berhubungan langsung dengan bahasa mesin. Sedangkan bahasa pemrograman Delphi berada di atas bahasa pemrograman rakitan, yang sering disebut OOP (Object Orinted Programming). Bahasa mesin adalah kumpulan kode biner yang merupakan instruksi yang bias dijalankan oleh komputer. Sedangkan bahasa rakitan memakai kode mnemonic untuk menggantikan kode biner, agar lebih mudah diingat sehingga memudahkan penulisanprogram.
Program yang ditulis dengan bahasa rakitan terdiri dari label; kode mnemonic dan lainnya, pada umumnya dinamakan sebagai program sumber (source code) yang belum bisa diterima oleh prosesor untuk dijalankan sebagai program tapi harus diterjemahkan terlebih dahulu menjadi bahasa mesin dalam bentuk kode biner.
BILANGAN HEXADESIMAL
bilangan bilangan hexadesimal tersebut empat bit empat bit sesuai dengan konversi dalam biner. Contoh bilangan FE16 dalam konversi biner nya adalah F menjadi 11112 dan E menjadi 00012 sehingga FE16 = 111100012. Cara mengkonversi ke bilangan desimal sama dengan biner Contoh:
3A hexa = (3 * 161) + (10 * 160) = 48 + 10
= 58 desimal
BAGIAN – BAGIAN DARI PROGRAM ASSEMBLER
Berikut ini adalah bagian – bagian dari program assembler yaitu: Label
Label merupakan suatu simbol yang didefinisikan sendiri oleh pembuat program untuk menandai lokasi memori pada area program. Simbol dan label a dalah dua hal yang berbeda. Simbol tidak menggunakan titik dua, sedangkan label harus diakhiri dengan titik Contoh :
PAR EQU 500 ; “PAR” Menunjukan suatu simbol ; dari nilai 500
MULAI:
MOV A, #0FFh ; pada label; “Mulai” nilai 0FFh ; dipindahkan ke Akumulator
Dalam satu baris hanya ada satu label, pada umumnya Assembler membatasi jumlah karakter yang bisa digunakan hingga 31 karakter.
Mnenonik
Mnemonic instruksi atau pengarah Assembler dimasukan dalam “Mnemonic field” yang mengikuti “label mnemonic”.Mnemonic instruksi misalnya ADD, MOV, INC dan lain-lain.Sedangkan pengarah Assembler misalnya ORG, EQU, DB dan lain-lain.
Operand
LAGI:
JNB LAGI ; LAGI adalah operand
Komentar
Komentar harus diawali dengan titik koma. Sub rutin dari bagian besar program yang mengerjakan suatu operasi biasanya diawali dengan blok komentar yang menjelaskan fungsi sub rutin atau bagian besar program tersebut.
End
Petunjuk END merupakan kode perintah terakhir yang menunjukan batas akhir dari proses Assembly. Instruksi yang sering digunakan dalam pembuatan program yaitu :
ADD A,Rn Menambah isi register Rn dengan isi akumulator lalu disimpan di akumulator
ADD A,R1
ADD A, direct Menambah isi direct dengan akumulator, hasilnya disimpan di akumulator
ADD A, 30H
ADD A, #data Menambahkan immediate data ke akumulator ADD A, #20H ADD A, @Rn Menambahkan isi dari alamat yang ditunjuk
Rn dengan akumulator
ADD A, @R1
ADDC A, #data
Menambahkan immediate data ke akumulator dengan carry
ADDC A, #20H
SUBB A, Rn Kurangkan isi register Rn dari akumulator SUBB A, R1
INC A Tambah isi akumulator dengan 1 INC A
DEC A Kurangkan isi akumulator denga 1 DEC A
MUL AB Kalikan isi A dengan isi B, low-bytedisimpan pada akumulator, dan highbytepada B
MUL AB
DIV AB Bagi isi A dengan isi B. Akumulator menerima hasil integer pembagian dan B menerima integer sisanya.
DIV AB
Instruksi Logika ini dipakai untuk melakukan operasi logika, yaitu operasi AND (instruksi ANL), operasi OR (instruksi ORL), operasi Exclusive-OR (instruksi XRL), operasi clear (instruksi CLR), instruksi komplemen (instruksi CPL), operasi penggeseran kanan atau kiri (instruksi RR, RRC, RL dan RLC) serta operasi penukaran data (instruksi SWAP). Data yang dipakai dalam operasi ini biasanya berupa data yang berada dalam akumulator atau data yang berada dalam memori data.
Instruksi Pemindahan Data
Tabel 10. Instruksi – instruksi Perpindahan Data
Instuksi Keterangan Contoh
MOV A, Rn Memindahkan isi register Rn ke akumulator
MOV A, R0
MOV A,direct Memindahkan isi direct byte ke akumulator
MOV A, 30h
MOV A , #data Mengisi akumulator dengan nilai data MOV A,#20h MOV A, @Rn Mengisi akumulator dengan isi dari
alamat yang ditunjuk oleh Rn
MOV A, @R0
MODE – MODE PENGALAMATAN
Mode Pengalamatan Langsung
Dalam pengalamat langsung nilai yang akan disimpan dalam suatu memori diperoleh secara langsung dengan mengambil dari lokasi memori yang lain.Contoh :
MOV A,30H ; isi akumulator dengan bilangan 30 heksadesimal Mode Pengalamatan Tak Langsung
Dalam pengalamatan tak langsung, instruksi menentukan suatu register yang digunakan untuk menyimpan alamat operan Contoh :
ADD A,R ; Tambahkan isi RAM yang lokasinya ditunjukan oleh register R1 ke akumulator.
MOV A,#20H ; isi akumulator dengan bilangan 20 heksadesimal Data konstanta merupakan data yang menyatu dengan instruksi, contoh intruksi diatas mempunyai arti bahwa data konstantanya, yaitu 20H, (sebagai data konstanta harus diawali dengan ’#’ dan tanda H untuk menyatakn format bilangan heksadesimal) disalin ke Akumulator (A).
Mode Pengalamatan Data
Pengalamatan data terjadi pada sebuah perintah ketika nilai operasi merupakan alamat data yang akan diisi atau yang akan dipindahkan. Contoh : MOV P1,A ; isi P1 dari nilai akumulator.
Alat dan bahan yang digunakan adalah Computer yang teristall : Editor Teks ( mis. Notepad),program assembler (8051IDE, ASM51, dan ASEM51). Program simulator (TS Control Emulator, 8052 emulator.
2.3.4.2 Prosedur Kerja
Prosedur kerja sebagai berikut :
1. Struktur penulisan bahasa assembly, pengalokasian memory dan penggunaan compiler.
2. Cara penulisan Makro
3. Menyisipkan file library (procedure) dalam modul yang berbeda. 2.3.5 Hasil
10 JBC Jump if direct Bit is
set &
00 NOP
10 JBC Jump if direct Bit is
set &
clear bit
00 NOP
10 JBC Jump if direct Bit is
set &
02 LJMP code addr
bentuk program assembler dan juga pada program simulatornya tersebut. Bahasa-bahas pemprograman tersebut diartikan dalam bentuk mneumerik dan selanjutnya dalam bentuk arti maksud dari bahasa itu sendiri.
Aplikasi dari bahasa-bahasa pemprograman tersebut adalah berguna dalam pembuatan sistem control dalam membuat perintah yang akan di artikan dalam bentuk bahasa pemprograman dalam computer atau sitem control kemudian diartikan sebagai output oleh LCD pada mikrokontroler tersebut. Sedangkan aplikasi di Teknik Pertanian berguna atau berguna dalam pembuatabn suatu alat yang memiliki sistem control otomatik dalam bentuk bahasa pemprograman mikrokontroler seperti penentuan berbagai parameter produk pertanian seperti kematangan, warna maupun ukuran dan masih banyak lagi.
2.3.7 Penutup
2.3.7.1 Kesimpulan
Kesimpulan pada praktikum objek ini adalah dengan melakukan praktikum ini praktikan dapat mengerti bagaimana cara mengubah bahasa dari sistem control atau bahasa pemprograan yang dimengerti computer dari input yang diberikan menjadi bahasa yang dimengerti berdasarkan perintah-perintah yang diinginkan sioperator sehingga sistem control yang dibuat sesuai dengan apa yang diinginkan.
2.3.7.2 Saran
BAB III. PENUTUP
3.1 Kesimpulan
Sistem kontrol dapat didefinisikan sebagai hubungan timbal balik antara komponen-kompenen yang membentuk suatu konfigurasi sistem dan memberikan suatu hasil sesuai dengan yang diharapkan. Hasil ini aalah keluaran yang dinamakan respon sistem yang dimaksud. Jika harus ada yang dikendalikan, dalm bidang keteknikan berupa sistem fisis yang biasa disebut dengan kendalian (Plat).
pemecahan masalah dalam mengatasi kekurangan yang ada yang masih menggunakan sistem manual.
3.2 Saran