PERANCANGAN SOFT SENSOR SPECIFIC GRAVITY
DALAM GAS COMPRESSOR PETANI GAS PLANT
DENGAN METODE JARINGAN SYARAF TIRUAN
DI PT. CHEVRON PASIFIC INDONESIA
( Fatwa Dhana Nugraha, Ir. Moch. Ilyas HS.) Jurusan Teknik Fisika FTI ITS Surabaya Kampus ITS Keputih Sukolilo Surabaya 60111 Telp : +6231-7321352/ Handphone : +6856-3309049
E-mail : [email protected] Abstrak
Specific Gravity (SG) didefinisikan sebagai rasio dari kerapatan suatu gas terhadap kerapatan suatu udara dimana diukur dalam keadaan suhu dan tekanan yang sama. Specific Gravity juga merupakan suatu paramater nilai kualitas dari suatu gas tersebut. Penentuan Specific Gravity sendiri memerlukan hasil sample gas yang diambil dari plant dan di analisa menggunakan gas cromatography. Hal ini membutuhkan waktu beberapa hari untuk mendapatkan hasilnya dan tentu saja tidak efisien. Oleh karena itu dibuatlah sebuah softsensor Specific Gravity agar mendapatkan hasil Specific Gravity lebih cepat dan akurat dengan menggunakan metode jaringan syaraf tiruan. Dimana softsensor ini memiliki 5 variabel input dan 1 variabel output, stuktur jaringan feed forward. Arsitektur jaringan Multilayer Perceptron (MLP), dan struktur model menggunakan NNARX (Neural Network AutoRegresive with eXogenous input) dengan metode pembelajaran Levenberg Marquardt. Struktur JST yang dihasilkan mampu mengestimasi nilai Specific Gravity pada saat training dengan nilai RMSE sebesar 0.0086604 serta nilai VAF sebesar
97.2381% dan nilai RMSE = 0.0193 % mole dan VAF = 99.2300 % untuk validasi pemodelan. Kata kunci : Specific Gravity, Soft Sensor, Jaringan Syaraf Tiruan
1. Latar Belakang
PT. Chevron Indonesia Company (PT. CPI) adalah salah satu perusahaan minyak dan gas alam di Indonesia selalu mengedepankan kualitas terhadap produksinya dalam hal ini adalah gas alam. Dalam proses produksi gas kualitas dari produk yang dihasilkan salah satu parameter kualitas dari gas adalah specific gravity (SG).
Specific gravity didefinisikan sebagai rasio dari
kerapatan suatu gas terhadap kerapatan suatu udara. Kedua kepadatan tersebut diukur dalam keadaan suhu dan tekanan yang sama. Biasanya, tekanan baku (Psc) dan suhu baku (Tsc)
dipergunakan untuk mengetahui dari specific gravity.Dalam pengambilan hasil Specific Gravity (SG) dilakukan dengan cara mengambil sample gas dengan cara di analisa menggunakan gas cromatography, namun terdapat masalah yaitu terdapat rentang waktu untuk mendapatkan hasil yaitu beberapa hari dan perlu dilakukannya pengambilan sample gas tsb, oleh karena itu dibuatlah tugas akhir ini untuk memberikan solusi atas permasalahan tersebut secara cepat dan sesuai dengan hasil yang diinginkan.
Soft sensor adalah software sensor atau perangkat
lunak yang digunakan untuk mengukur variabel tak terukur secara langsung dengan cara estimasi berdasarkan variabel-variabel proses yang mempengaruhinya. Soft sensor dalam proses kontrol sangat berguna sekali untuk memonitor variabel proses, sehingga dapat mengefisiensikan kinerja. Selain itu
soft sensor dapat menggantikan kerja dari analyzer. Terdapat
beberapa metode dalam perancangan soft sensor, antara lain dengan metode fuzzy, jaringan syaraf tiruan, rekonsiliasi data, dan lain-lain. Pada tugas akhir ini metode yang digunakan
dalam perancangan soft sensor adalah jaringan syaraf tiruan. Dengan batasan masalah antara lain :
· Penelitian dilakukan pada Petani Gas Plant di Chevron Pasific Indonesia
· Data yang digunakan adalah hasil Lab Petani Gas
Sample di Chevron Pasific Indonesia.
· Proses perancangan soft sensor dilakukan dengan menggunakan Jaringan Syaraf Tiruan.
· Algoritma belajar yang digunakan pada perancangan soft sensor dengan algoritma belajar Levenberg Marquardt.
· Digunakan permodelan dengan Multi Layer
Perceptron (MLP).
· Input output yang digunakan adalah input output dari
Compressor gas plant pada saat beroperasi (real
time).
· Plant yang akan digunakan sebagai bahan penelitian adalah Compressor Gas Plant
· Software yang digunakan dalam pengerjaan tugas akhir ini adalah pada MatlabR2008b.
2. Tinjuan Pustaka
2.1 Proses Gas Compressor Plant
Gambar 1 Unit Gas Compressor Petani Gas Plant Process
Flow Diagram [Chevron Pacific Indonesia, 2007]
2.2.1 Recipcrocating Compressor
Reciprocating compressor pada dasarnya merupakan
suatu mesin yang memiliki variabel kapasitas yang diperoleh dengan mengubah kecepatan dari penggerak utama.
Reciprocating compressor menjadi salah satu jenis yang telah
digunakan untuk aplikasi yang lebih luas. Kecepatan alirnya dapat mencapai 125 – 514 putaran per menit. Kecepatan kerja pistonnya dapat mencapai 500 – 950 ft per menit, namun sebagian besar dapat mencapai 700 – 50 ft per menit. Kecepatan nominal gas yang mampu melalui valve biasanya pada range 4500 – 8000 ft per menit. Tekanan dischargenya mulai dari range tekanan vakum sampai 3000 lb per in2.
Kompresor ini menggunakan piston yang dikendalikan oleh crankshaft untuk menghasilkan tekanan udara. Piston ini
bergerak di dalam tabung untuk mendorong dan memberi tekanan pada udara, sehingga udara tersebut mempunyai tekanan yang cukup tinggi. Jenis kompresor ini merupakan jenis kompresor moderen yang pertama kali dikembangkan. 2.2.2 Bagian – Bagian Kompressor
1. Prime mover
Gas compressor memerlukan alat penggerak (prime mover),
yang pada umumnya digerakkan oleh tenaga motor bakar dengan bahan bakar gas atau motor listrik. Motor bakar itu sendiri dapat diklafisikasikan menjadi dua:
2. Sistem penggerak compressor
• Integral, crankshaft prime mover juga memutar connecting
rod compressor cylinder atau silinder yang digerakkannya.
Contoh: pada Engine Clark, Cooper dan Ajax
• Direct coupling, crankshaft prime mover dihubungkan dengan memakai coupling ke crankshaft compressor.
Contoh: pada Waukesha engine dan Caterpillar
• V-belt, prime mover dan compressor dihubungkan dengan memakai V belt.
Contoh: pada Joy compressor
2.2.3 Perlengkapan Penunjang Operasi pada Gas Compressor Beberapa instrument yang termasuk dalam gas
compressor antara lain :
a. Gas filter
Gas filter berfungsi sebagai penyaring gas dengan cara menangkap dan menyerap kotoran berupa partikel padat atau kotoran lain yang terbawa oleh gas, sehingga gas masuk ke
compressor dalam keadaan bersih. Bahan filter ini umumnya
terbuat dari glaswool,fibre atau fibre nylon. Ukuran filter dinyatakan dalam:
b. Pulsation dampener
Reciprocating compressor memiliki sifat intermitten delivery atau pengaliran yang terputus-putus. Hal tersebut
dapat menimbulkan vibrasi pada sistem pemipaan maupun peralatan yang berhubungan, dan dapat menyebabkan kerusakan mekanikal. Vibrasi tersebut perlu dikurangi dengan memasang peralatan yang disebut pulsation dampener, yang dipasang pada suction dan discharge pada gas compressor. Peralatan ini sering juga disebut sebagai suction bottle dan
discharge bottle.
Gambar 2 Compressor dan pulsation dampener c. Cooler
Cooler berfungs i untuk mendinginkan/menurunkan
temperatur gas dan menghasilkan kondensasi yang bisa mengurangi kandungan air dalam gas. Pada umumnya digunakan jenis fin-fan cooler. Pada compressor multi-stage terdapat beberapa cooler yaitu:
• Pre-cooler
Sebagai pendinginan awal sebelum gas masuk ke compressor; berfungsi untuk menurunkan temperatur gas dan mengurangi uap air yang terbawa dalam gas.
• Inter cooler
Dipasang di antara stage, yang digunakan untuk menurunkan temperatur gas yang telah dimampatkan pada compressor. Hasil dari pemampattan tersebut, tekanan dan temperature menjadi naik.
• After cooler
Memiliki bentuk yang sama dengan pre atau inter cooler dan hanya dipasang pada stage terakhir.
d. Vessel (Inlet scrubber)
Vessel adalah vertical separator tiga phase, yang
digunakan untuk memisahkan gas, condensate, dan air berdasarkan specific gravity. Pada compressor 2 stage memiliki 3 vessel dan pada compressor 3 stage mempunyai 4 vessel. Tiaptiap
vessel secara umum dilengkapi dengan peralatan sbb:
1. Pressure gauge 2. Temperature gauge 3. Sigh glass
2.3 Specific Gravity
Gas alam didefinisikan sebagai suatu zat yang homogen dengan kekentalan (viscosity) dan kepadatan (density) dimana volume akan mengikuti suatu luasan yang akan ditempatinya. Umunya, gas alam adalah suatu campuran hidrokarbon dan non hidrokarbon. Zat hidrokarbon yang terkandung di dalam gas alam antara lain adalah metan, etana, propana, butana pentana dan dalam jumlah kecil terdapat adalah hexana dan zat yang lebih berat lainnya. Serta terdapat zat nonhidrokarbon yang bersifat beracun yang tidak dibutuhkan dalam proses yang nanti akan dihilangkan adalah karbondioksidsa, nitrogen dan hidrogen sulfida.
Hubungan antara komposisi gas dengan sifat-sifat kimia maupun fisik akan membantu mengetahui karakteristik dari suatu gas tersebut. Beberapa sifat yang terkandung dalam gas antara lain :
Ø Molecular weight, Ma
Ø Specific gravity, gg
Ø Compressibility factor, z Ø Density, rg
Ø Specific volume, v
Ø Isothermal gas compressibility coefficient,Cg Ø Gas formation volume factor, Bg
Ø Gas expansion factor, Eg Ø Viscosity, µg
Specific gravity didefinisikan sebagai rasio dari
kerapatan suatu gas terhadap kerapatan suatu udara. Kedua kepadatan tersebut diukur dalam keadaan suhu dan tekanan yang sama. Biasanya, tekanan baku (Psc) dan suhu baku (Tsc)
dipergunakan untuk mengetahui dari specific gravity. Seperti dalam persamaan berikut :
...(2.1) Assumsi bahwa kedua campuran gas tersebut dan udara dalam keadaan yang ideal maka, specific gravity dapat diekspresikan sebagai :
...(2.2) Atau
...(2.3) Dimana gg = specific gravity gas
rair = kerapatan udara
Mair =berat molekul dari udara = 28.96
Ma = berat molekul dari gas alam
psc = tekanan standart , psia
Tsc = suhu standart, °R
2.4 Soft Sensor
Soft sensor tidak dipasang di lapangan. Soft sensor
menerima input dari variabel yang terukur sensor lain, yang kemudian diolah dengan persamaan matematis sistem tersebut, dan kemudian dihasilkan outputan variabel yang diingikan berdasarkan persamaan matematis tersebut.
Terdapat beberapa metode yang digunakan untuk perancangan soft sensor antara lain dengan metode fuzzy, rekonsiliasi data, jaringan syaraf tiruan, dan lain-lain. Soft sensor biasanya digunakan dalam kolom destilasi dimana digunakan untuk mengestimasi konsentrasi produk yang keluar dari kolom destilasi. Dalam gas compressor, soft sensor digunakan untuk mengestimasi specific gravity , dimana perhitungan dalam soft sensor ini menggunakan metode Jaringan syaraf tiruan.
2.5 Jaringan Syaraf Tiruan
Jaringan syaraf tiruan (JST) merupakan algoritma yang menirukan cara berpikir otak manusia yang selalu mencoba untuk mensimulasikan proses pembelajaran. Seperti halnya otak manusia, Jaringan syaraf tiruan juga terdiri dari beberapa
neuron, dan terdapat suatu hubungan antara neuron-neuron
tersebut. Neuron akan mentransformasikan informasi yang diterima melalui sambungan keluarnya menuju ke
neuron-neuron yang lain.
a. x1 A c t i v a t i o n F u n c t i o n w1 wd w2 w0 x2 xd x0= 1 o b.
Gambar 3 a. Sel otak manusia. b. Struktur Jaringan syaraf tiruan [Norgaard, 2000]
Bagian-bagian JST antara lain: · neuron atau node · bobot (weight) · fungsi aktivasi · lapis (layer) · Neuron (node)
Merupakan unit pemrosesan sederhana. Dalam neuron ini terdapat mekanisme-mekanisme pengolahan data, antara lain: perkalian input dengan bobot dan fungsi aktivasi. · Bobot (wight)
Bobot adalah nilai pemberat dari suatu input yang masuk pada JST. Pada JST, bobot akan mengalami proses adaptasi agar didapatkan suatu fungsi JST yang sesai dengan yang diinginkan.
· Fungsi aktivasi Jaringan syaraf tiruan
Hasil penjumlahan dari setiap input yang telah dikalikan matrik pembobot akan dibandingkan dengan suatu nilai ambang (treshold) tertentu melalui fungsi aktivasi setiap
neuron. Beberapa fungsi aktivasi antara lain: Linear
F(x) = x untuk semua harga x
Kurva output untuk fungsi aktifasi liniear dapat dilihat pada gambar 2.4 dibawah ini :
Gambar 4 Fungsi aktifasi linear [Norgaard, 2000]
Tangent Hiperbolik
Gambar 5 Fungsi aktifasi tangent hiperbolik [Norgaard, 2000]
) ( ) ( ) ( ) ( exp exp exp exp ) ( cx cx cx cx x f + -= -- ...(2.4) · Lapis (layer)
Merupakan sekumpulan neuron yang menjalankan fungsi yang sama. Dalam penerapannya, JST terdiri atas beberapa lapis, diantaranya lapis input, lapis tersembunyi
(hidden layer) dan lapis output.
Tujuan dari pelatihan adalah untuk mengatur matrik pembobot sehingga JST dapat melaksanakan suatu fungsi. Jenis pelatihan JST antara lain adalah:
· supervised learning (berlatih dengan guru)
Tiap pola input mempunyai output target pasangannya. Sehingga pada belajar tipe ini masing-masing input mempunyai output target pasangan yang bersesuaian. Pada proses belajarnya, bobot-bobot dibangun menuju kesesuaian respon pasangan input-output dari pola yang diajarkan bobotnya, dapat memberikan pola yang sesuai dengan output target dari input tersebut. Dalam hal ini dapat diterapkan toleransi kesalahan output respon terhadap target yang seharusnya.
· unsupervised learning (berlatih tanpa guru)
Pada metode belajar ini, jaringan menentukan sendiri pasangan outputnya dari input yang diberikan kepadanya, dasar yang digunakan adalah kadar kesesuaian dengan pola-pola yang pernah diberikan kepadanya atau yang diberikan sebelumnya. Tiap sel
output mempunyai penghargaan paling tinggi terhadap
pola-pola tertentu. Setiap pola input yang diberikan akan menghasilkan salah satu output dengan harga terbesar yang menunjukkan kemiripan pola input dengan pola yang dihargai tinggi oleh sel output tersebut. Bila kadar kemiripannya dapat diterima, maka pola input tersebut dimasukkan dalam kelompok pola yang dihargai tinggi oleh sel output tersebut. Bila kadar kemiripannya rendah, yang berarti pola input tersebut terlalu berbeda dengan pola-pola sebelumnya, maka diberikan satu sel
output yang lain untuk mewakili pola tersebut yang
bobotnya memberi penghargaan tinggi kepada pola
input tersebut.
Bobot-bobot tersebut dengan sendirinya membentuk alur kerja jaringan seperti yang telah dijelaskan tadi, yaitu menghasilkan keputusan pada output dengan dasar pengelompokan pola-pola input yang diberikan. Secara umum tiap sel output merupakan wakil dari sekelompok pola yang pernah diberikan kepada jaringan. Untuk proses selanjutnya tiap input yang diberikan akan dilakukan pengelompokan pola yang ada, maka untuk pola tersebut dinyatakan sebagai kelompok pola yang baru, dan diberikan salah satu output sebagai wakil dari kelompok yang baru tersebut. Bagian dari
output yang menjadi wakil tiap kelompok pola ditentukan
sendiri oleh jaringan.
Fungsi aktivasi dibuat sedemikian rupa sehingga terjadi pembatasan antara daerah positif dan daerah negatif Gambar 2.6 adalah single layer perceptron dengan 3 unit input (x1, x2 dan x3) dan 1 output y. Bobot dari x1, x2 dan x3 ke neuron pada lapisan output masing-masing adalah w1, w2 dan w3. Fungsi aktivasi yang digunakan adalah undak biner.
Gambar 6. Single Layer Perceptron Keterangan: b = bias w = bobot
f
x
1
-f
1
c
-1
-c
x = input
F = fungsi aktivasi y = output
Secara garis besar algoritma proses training pada jaringan syaraf tiruan adalah sebagai berikut :
Ø Menentukan jumlah lapisan yang akan digunakan, menginisialisasi bobot terkoneksi secara acak antara satu lapisan dengan lapisan berikutnya pada suatu bilangan random yang kecil, pemberian nilai parameter α dan µ, serta menentukan nilai Emaks
(toleransi kesalahan maksimum) dan jumlah iterasi maksimum.
Ø Menyiapkan data masukan dan nilai output yang diharapkan (target).
Ø Menghitung semua nilai hasil output pada layer hidden Zj untuk keseluruhan masukan. Lalu
menghitung nilai hasil output pada layer output untuk semua masukan Zj pada layer hidden.
Ø Mengukur error kekanan dengan melakukan perhitungan nilai sinyal error äk pada layer output dan layer hidden. Nilai sinyal error yang didapatkan disimpan dalam memori tersendiri.
Ø Melakukan penyesuaian bobot yang terletak antara
layer input dan layer hidden, selanjutnya antara layer hidden dan layer output.
Dengan memperhatikan apakah total error yang terjadi dapat diterima (E<Emaks) dan/atau jumlah iterasi yang
telah dilakukan belum melewati batas iterasi yang ditetapkan. Jika telah memenuhi syarat proses training, maka nilai bobot yang didapat akan disimpan dan proses training selesai. Jika belum memenuhi syarat maka perlu mengulang proses
training.
2.5.1 Karakteristik Jaringan Syaraf Tiruan
Sebuah jaringan yang sederhana mempunyai struktur
feedforward dimana sinyal bergerak dari input kemudian
melewati lapisan tersembunyi dan akhirnya mencapai unit
output (mempunyai struktur perilaku yang stabil). Tipe
jaringan feedforward mempunyai sel syaraf yang tersusun dari beberapa lapisan. Lapisan input bukan merupakan sel syaraf. Lapisan ini hanya memberi pelayanan dengan mengenalkan suatu nilai dari suatu variabel. Lapisan tersembunyi dan lapisan output sel syaraf terhubung satu sama lain dengan lapisan sebelumnya. Kemungkinan yang timbul adalah adanya hubungan dengan beberapa unit dari lapisan sebelumnya atau terhubung semuanya
2.5.2 Multilayer Percepteron (MLP)
Multylayer Percepteron (MLP) adalah jaringan yang
paling sering mempertimbangkan anggota dari keluarga jaringan syaraf tiruan. Alasan utamanya adalah kemampuannya untuk memodelkan secara sederhana dari hubungan fungsional yang kompleks. Rumus matematik yang mengekspresikan apa yang terjadi pada jaringan-MLP diambil dari:
÷
÷
ø
ö
ç
ç
è
æ
+
÷
÷
ø
ö
ç
ç
è
æ
+
=
=
å
å
= = h n j i n l j l l j i j i i i it
g
F
W
f
w
w
W
y
1 0 , 1 0 , , ,]
,
[
)
(
jj
q
j
)
...(2.5)θ menunjukkan vektor parameter yang didalamnya terdapat
semua parameter JST yang dapat diatur (bobot dan bias). Untuk mendapatkan nilai bobot, terlebih dahulu harus didapatkan suatu contoh bagaimana hubungan antara output dengan input. Suatu cara untuk mendapatkan bobot disebut sebagai pelatihan (training) atau pembelajaran (learning), yang pada dasarnya merupakan sebuah masalah optimasi.
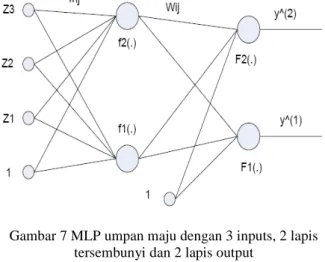
Gambar 7 MLP umpan maju dengan 3 inputs, 2 lapis tersembunyi dan 2 lapis output
2.5.3 Identifikasi Sistem Berbasis Jaringan syaraf tiruan
Tahapan dalam sistem identifikasi:
1. Eksperimen, meliputi input sequence design. Eksperimen dilakukan untuk mendapatkan serangkaian data input-output yang menerangkan perilaku proses pada suatu
range daerah operasi tertentu. Ide utama dari proses
eksperimen adalah untuk memasukkan input yang bervariasi, u, dan mengamati akibatnya pada output,y.
Pasangan data yang berhubungan dengan input dan output:
[
]
{
u
t
y
t
T
N
}
Z
N=
(
),
(
)
,
=
1
,....,
...(2.6) kemudian digunakan untuk mendapatkan sebuah model dari sistem. Apabila sistem yang akan diidentifikasi menjadi tidak stabil atau mengandung sedikit peredaman dinamik, maka pembangkitan data dilakukan dalam keadaan lup tertutup. Beberapa parameter penting dalam melakukan eksperimen antara lain: pemilihan sampling frekuensi, pemilihan sinyal input yang sesuai dan pemrossan data.2. Pemilihan struktur model, meliputi pemilihan struktur,
noise modeling. Pemilihan struktur model menyangkut
jumlah sinyal input-output (regressor) yang digunakan sebagai masukan bagi model dalam menghasilkan output prediksi. Struktur model adalah pasangan kandidat model. Masalah utama dalam pemilihan model struktur adalah:
· Memilih sebuah “keluarga” dari struktur model untuk mendiskripsikan sebuah sistem, contohnya: struktur model linier, jaringan multilayer percepteron, jaringan radial basis function, wavelets atau model
Hammerstein.
· Memilih sebuah subset dari keluarga yang telah ditentukan. Pada struktur sistem linier, dapat berupa sebuah struktur model ARX(3,2,1), dimana (3,2,1) adalah waktu tunda dari satu periode sampling dan
output saat ini tergantung dari dua output masa
lampau dan tiga input masa lampau.
3. Estimasi parameter, meliputi parameter estimation. Jika struktur model telah ditentukan, maka tahap berikutnya adalah melakukan estimasi terhadap parameter model agar mampu memberikan hasil yang baik berdasarkan kriteria tertentu. Kriteria tersebut dapat dirumuskan dengan berbagai cara, tetapi harus secara ideal menghubungkan penggunaan model yang diharapkan. Strategi yang paling umum adalah dengan mengambil yang menyediakan one-step a head prediction paling bagus dengan squared error terkecil antara output sistem dengan output prediksi. Dalam tahap ini, proses yang paling penting adalah penentuan bobot jaringan atau proses pelatihan. Pasangan data diberikan oleh persamaan (2.1) dan pasangan model kandidat adalah:
)
(
]
,
[
)
(
)
|
(
)
(
t
y
t
e
t
g
t
e
t
y
=
)
q
+
=
q
+
...(2.7) Tujuan dari pelatihan adalah untuk mendapatkan sebuah pemetaan dari pasangan data ke pasangan kandidat modelq
)
®
NZ
....(2.8) sehingga didapatkan model yang menyediakan prediksi mendekati output sistem yang sebenarnya. Metode yang paling sering digunakan untuk mengukur kemiripan antara model output dengan model sebenarnya adalah tipe kriteria mean square error.å
å
= ==
-=
N t N t N Nt
N
t
y
t
y
N
Z
V
1 2 1 2)
,
(
2
1
)]
|
(
)
(
[
2
1
)
,
(
q
)
q
e
q
...(2.9)Pola ini disebut sebagai Prediction Error Methode
(PEM), dimana tujuannya adalah untuk meminimasi
jumlah dari error prediksi. Fitur utama dari kriteria mean
square error adalah kesederhanann pemakaiannya,
dimana aturan update bobot dapat diperoleh dan pengetahuan tentang distribusi noise biasanya tidak diperhitungkan. Beberapa metode untuk mencari
prediction error antara lain [Norgaard, 2000]:
4. Model validation, diperlukan untuk mengetahui apakah model yang telah diperoleh mampu memenuhi kebutuhan yang diperlukan.
3. Metodologi Percobaan
Gambar 8 Alur Penelitian
1.2 Data Input-Output Lapangan
Pengambilan data di lapangan berupa data input output dari gas compressor plant. Data yang digunakan adalah data yang berasal dari pengambilan sample pada gas compressor. Data tersebut telah terdapat beberapa data yang diinginkan seperti
specific gravity dan lain-lain Jumlah data yang diambil
sebanyak 150 pasangan data input output, antara lain :
- input Temperature pada incoming compressor (oF)
- input pressure pada incoming compressor (psi)
- input laju alir dari compessor (MSCFD)
- output Temperatur pada outgoing compressor
diasumsikan sebagai inputan proses (oF)
- output pressure pada outgoing compressor
diasumsikan sebagai inputan proses (psi)
- Output Specifig Gravity dalam gas alam dari
compressor gas plant
Data input output variabel proses dapat dilihat pada lampiran A.
1.3 Preprocessing Data
Sebelum data tersebut digunakan maka dilakukan proses
scalling. Data scalling diperlukan untuk mempercepat
konvergensi pada saat data training dilakukan. Sebelum data
scalling dilakukan data ditranformasikan lebih dahulu menjadi zero mean dan unity standart deviations.
s
X X
X1 = - ... ..(3.10) Kemudian discalling menjadi
) min( ) max( ) min( 1 1 1 1 2 X X X X X -= ... (3.11) Setelah dilakukan proses preprocessing diatas maka jaringan syaraf tiruan akan melakukan training untuk
mendapatakan model berdasarkan algorima belajar Levenberg
Marquardt.
1.4 Identifikasi proses (Training dan Validasi Model) Gas Compressor Plant
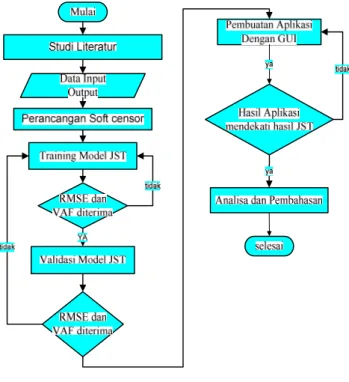
Prosedur yang dilakukan untuk melakukan identifikasi proses dengan jaringan syaraf tiruan dapat dilihat pada gambar 3.3 berikut ini :
Gambar 9 Prosedur Identifikasi
Prosedur yang dilakukan untuk melakukan identifikasi proses dengan Jaringan Syaraf Tiruan terdiri dari tahapan-tahapan sebagai berikut :
· Eksperimen/Percobaan
Eksperiment/percobaan pada tugas akhir kali ini merupakan pengambilan data dari Gas Compressor Plant. Dari data data ini memiliki hubungan sebagai berikut :
[
]
{
u t u t u t u t u t y t t N}
ZN ,.... 1 , ) ( ), ( ), ( ), ( ), ( ), ( 2 3 4 5 1 1 = = ...(3.12) Dengan, N = Jumlah datau1 = Data laju alir dari compessor (MSCFD)
u2 = Data Temperature pada incoming compressor(oF)
u3 = Data pressure pada incoming compressor (psi)
u4 = Data Temperatur pada outgoing compressor (oF)
u5 = Data pressure pada outgoing compressor (psi)
y1 = Data Specifig Gravity dalam gas alam dari
compressor gas plant.
· Pemilihan Struktur Model
Struktur model yang digunakan pada tugas akhir kali ini adalah NNARX (Neural Network AutoRegresive with
eXogenoes Input). Struktur model NARX ini mempunyai
/dapat menghasilkan prediktor dengan tanpa adanya feedback. Dengan persamaan output model sebagai berikut :
(
ˆ1, ˆ2, ˆ3, ˆ4, ˆ5, ˆ1)
ˆ f u u u u u y
Y = ...(3.31)
Dari data data yang didapatkan diatas, data data tersebut digunakan untuk proses training dari Jaringan Syaraf Tiruan, dengan menggunakan struktur Multilayer Layer
Perceptron (MLP) dengan 3 layer, yaitu input layer, hidden
layer dan output layer. Pada tiap tiap neuron terdapat fungsi
aktifasi yang terdapat pada arsitektur jaringan tersebut. Fungsi aktifasi pada hidden layer menggunakan linier sedangakan pada output layer menggunakan fungsi aktifasi
tangent hyperbolic. Algoritma training yang digunakan
adalah Levenberg Marquardt sehingga setelah didapatkan bobot training maka bobot tersebut digunakan untuk proses validasi. Data tersebut digunakan untuk training dari Jaringan Syaraf Tiruan, yaitu menggunakan struktur jaringan Multi
Layer Perceptron (MLP) dengan jumlah layer sebanyak tiga,
yaitu input layer, hidden layer dan output layer.
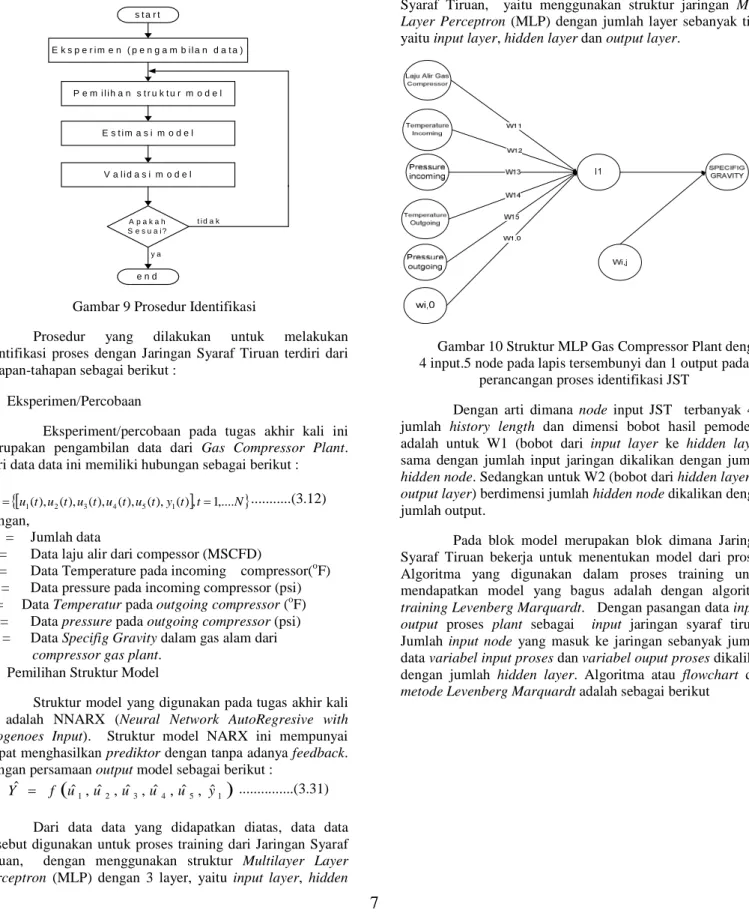
Gambar 10 Struktur MLP Gas Compressor Plant dengan 4 input.5 node pada lapis tersembunyi dan 1 output pada
perancangan proses identifikasi JST
Dengan arti dimana node input JST terbanyak 4 x jumlah history length dan dimensi bobot hasil pemodelan adalah untuk W1 (bobot dari input layer ke hidden layer) sama dengan jumlah input jaringan dikalikan dengan jumlah
hidden node. Sedangkan untuk W2 (bobot dari hidden layer ke output layer) berdimensi jumlah hidden node dikalikan dengan
jumlah output.
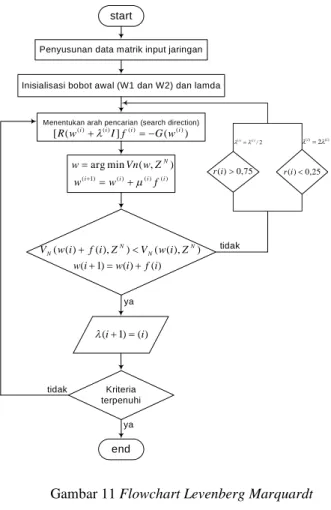
Pada blok model merupakan blok dimana Jaringan Syaraf Tiruan bekerja untuk menentukan model dari proses. Algoritma yang digunakan dalam proses training untuk mendapatkan model yang bagus adalah dengan algoritma
training Levenberg Marquardt. Dengan pasangan data input-output proses plant sebagai input jaringan syaraf tiruan.
Jumlah input node yang masuk ke jaringan sebanyak jumlah data variabel input proses dan variabel ouput proses dikalikan dengan jumlah hidden layer. Algoritma atau flowchart dari
metode Levenberg Marquardt adalah sebagai berikut
P e m i l i h a n s t r u k t u r m o d e l E k s p e r i m e n ( p e n g a m b i l a n d a t a ) V a l i d a s i m o d e l E s t i m a s i m o d e l A p a k a h S e s u a i ? t i d a k y a s t a r t e n d
Gambar 11 Flowchart Levenberg Marquardt
Untuk melihat keberhasilan training, maka digunakan acuan parameter nilai RMSE (Root Mean Square Error). RMSE merupakan Akar rata - rata total kuadrat error yang terjadi antara output proses dan output target, makin kecil nilai RMSE maka makin besar tingkat keberhasilan training. Artinya bahwa RMSE merupakan standart error apabila suatu
output melebihi dari RMSE bisa dikatakan bahwa suatu output
tidak sesuai standart. Persamaan RMSE dapat dituliskan sebagai berikut :
(
)
N y y RMSE N i i iå
= -= 1 2 ˆ ... (3.13) Selain menggunakan nilai RMSE dalam menyatakan kriteria model plant, juga dinyatakan dalam VAF (VarianceAccounted For) dalam persen sebagaimana dinyatakan dalam
persamaan 3.40 Dengan ketentuan bahwa nilai VAF yang dihasilkan semakin besar semakin bagus (mendekati nilai 100).
[
]
[ ]
100
%
)
(
var
)
(
ˆ
)
(
var
1
x
t
y
t
y
t
y
VAF
ïþ ï ý ü ïî ï í ì-=
... (3.14) · Validasi ModelSetelah model proses didapatkan dari training Jaringan Syaraf Tiruan, yaitu nilai bobot W1 (bobot dari input
layer ke hidden layer) dan W2 (bobot dari hidden layer ke
output layer). Kedua bobot itu kemudian digunakan untuk proses validasi. Validasi ini dilakukan untuk mengetahui keakurasian dari model yang didapat dalam proses training. Yaitu dengan melihat respon output model yang dibandingkan
dengan output proses dengan parameter nilai RMSE terkecil dan VAF terbesar.
Berikut ini Flowchart proses identifikasi JST secara lengkap mulai training dan validasi seperti tergambar dalam gambar 12.
Gambar 12Flowchart proses identifikasi JST
1.5 Perancangan Soft Sensor
Setelah dilakukan pengambilan data di lapangan, kemudian dilakukan perancangan soft sensor. Perancangan
soft sensor ini merupakan aplikasi dari identifikasi jaringan
syaraf tiruan (JST).
Gambar 13 Blok skema Soft Sensor
Dalam menggunakan metode jaringan syaraf tiruan sebelumnya dilakukanlah sebuah pencarian pola-pola data tersebut dengan menggunakan jaringan syaraf tiruan. Dari pembelajaran dan validasi dari jaringan syaraf tiruan tersebut akan diketahui karakteristik data input output tersebut yang didefinisikan sebagai bobot dan bias. Setelah mengetahui struktur jaringan dari pola data tersebut maka dari didapatkanya bobot dan bias tersebut akan dilakukan proses
start
Penyusunan data matrik input jaringan Inisialisasi bobot awal (W1 dan W2) dan lamda
Kriteria terpenuhi
Menentukan arah pencarian (search direction)
) ( ] ( [ (i) (i) (i) (i) w G f I w R +l = -) , ( min arg N Z w Vn w= ) ( ) ( ) ( ) 1 (i i i i f w w+ = +m ) ), ( ( ) ), ( ) ( ( N N N N wi f i Z V wi Z V + < ) ( ) ( ) 1 (i wi f i w + = + ) ( ) 1 (i+ = i l end 25 , 0 ) (i < r 75 , 0 ) (i > r 2 / ) ( ) (i li l = l(i)=2l(i) ya tidak ya tidak
pembuatan soft sensor. Dengan menggunakan persamaan 2.6 dan telah mengetahui bobot dan bias baik bobot dan bias pada
input layer maupu output layer maka persamaan tersebut akan
menghasilkan sebuah model matematis dari pola-pola data dari soft sensor tersebut. Serta pemilihan fungsi-fungsi aktifasi yang telah dipilih.
Pembuatan soft sensor ini akan diaplikasikan dengan menggunakan software GUI (Graphical User Interface) sehingga dapat secara cepat diketahui dan lebih mudah dalam hal mengetahui hasil specific gravity tersebut.
2. Simulasi dan Analisa Data
4.1 Data Input Output Gas Compressor Plant
Data yang digunakan sebagai input output dari pemodelan gas compressor dan perancangan soft sensor adalah data input output lapangan, antara lain :
- data laju alir gas yang masuk dalam compressor (mscfd) - data Temperature gas alam masuk compressor
(Fahrenheit)
- data Pressure gas alam masuk compressor (psi)
- data Temperature gas alam keluar compressor
(Fahrenheit)
- data Pressure gas alam keluar compressor (psi)
- data Specifig Gravity dalam gas alam setelah keluar
Compressor
4.2 Perancangan Model Jaringan Syaraf Tiruan
Pada bab ini akan diketahui struktur jaringan yang akan dibuat untuk merancang soft sensor yang digunakan metode jaringan syaraf tiruan. Telah dijelaskan pada bab sebelumnya bahwa perancangan soft sensor ini merupakan aplikasi dari identifikasi jaringan syaraf tiruan. Struktur tersebut akan membantu dalam pembuatan soft sensor ini dengan memudahkan menemukkan pola-pola data yang akan diketahui dengan menggunakan proses pembelajaran dalam jaringan syaraf tiruan serta dapat menghasilkan data berupa
Specifig Gravity dalam gas alam setelah keluar Gas Compressor yang berasal dari training dan validasi.
Dari data-data yang telah didapatkan, maka sebagian dari data-data tersebut digunakan untuk proses training JST, dengan menggunakan struktur Multi Layer Perceptron (MLP) dengan 3 layer, yaitu input layer, hidden layer dan output
layer. Pada tiap-tiap neuron terdapat fungsi aktifasi pada
arsitektur jaringan tersebut. Fungsi aktifasi pada hidden layer menggunakan tangent hyperbolic sedangkan pada output layer menggunakan fungsi aktifasi linier. Algoritma training yang digunakan adalah Levenberg Marquardt sehingga setelah didapatkan bobot training maka bobot tersebut digunakan untuk proses validasi. Data tersebut digunakan untuk validasi JST menggunakan struktur jaringan
Pemodelan yang digunakan dalam perancangan soft
sensor adalah pemodelan feed forward dengan struktur input
yang digunakan adalah NNARX (Neural Network AutoRegresive with eXogenoes Input).
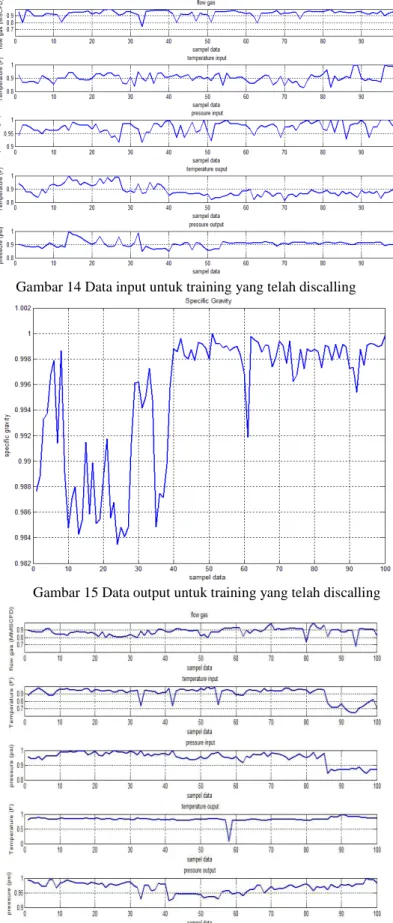
4.2.1 Preprocessing Data
Gambar 14 Data input untuk training yang telah discalling
Gambar 15 Data output untuk training yang telah discalling
Gambar 17 Data output untuk validasi yang telah discalling
4.2.2 Identifikasi Jaringan Syaraf Tiruan
Data input output yang telah di scalling akan mengalami proses indentifikasi jaringan syaraf tiruan. Data input output tersebut akan didapatkan pola-pola data dan berubah menjadi sebuah vektor-vektor dengan komposisi 1x100. Sehingga data input output tersebut masing-masing akan mempunyai data 5 variable sebagai input dengan komposisi 5x100 dan 1 variable output dengan komposisi 1x100. Hal ini bertujuan untuk membuat data tersebut memiliki pola input output yang sesuai dengan satuan waktu masing-masing.
Masing-masing data (6 buah data) memakai history
length sepanjang hl. Jumlah input node dalam pemodelan ini
sebanyak (6 x hl) + 1 (bias node dari input ke hidden layer sebanyak satu). Sedangkan jumlah hidden node (h) yang digunakan dalam penelitian ini adalah h+1 termasuk juga bias
node sebanyak satu. Untuk output node memiliki jumlah
sebanyak 1 buah yang merupakan hasil identifikasi dari output
proses. Dari struktur jaringan seperti ini akan menghasilkan
nilai bobot pada dari input ke hidden sebanyak {(6 x hl) + 1} x (h + 1). Untuk nilai bobot dari hidden ke output sebanyak {(h
+ 1)}.
Training Jaringan Syaraf Tiruan
Training jaringan syaraf tiruan dengan arsitektur jaringan Multi Layer Perceptron (MLP), yang terdiri dari
input layer, hidden layer dan output layer dapat dilihat pada
gambar 4.9 berikut ini :
Gambar 4.9 Arsitektur Jaringan MLP
Dalam proses training karena pemodelan kita memilih
feedforwad maka setiap data yang telah di scalling akan
dikalikan dengan fungsi aktivasinya pada setiap layer yaitu
input layer, hidden layer dan output layer untuk menghasilkan
output yang dinginkan. Setelah didapatkan output dari proses
training maka akan dilihat seberapa bagus hasil output
tersebut dengan dinyatakan dalam kreteria pemodelan proses yang dirumuskan dalam persamaan 3.25 yaitu RMSE (Root
Mean Square Error. Dengan ketentuan semakin kecil RMSE
yang dihasilkan (mendekati nilai 0) akan menghasilkan prediksi output yang lebih baik. Selain menggunakan nilai RMSE dalam menyatakan kriteria model plant, juga dinyatakan dalam VAF (Variance Accounted For) dalam persen sebagaimana dinyatakan dalam persamaan 3.26. Dengan ketentuan bahwa nilai VAF yang dihasilkan semakin besar semakin bagus (mendekati nilai 100).
Dalam proses peyempurnaan hasil output yang maksimal dan bagus maka dilakukan proses uji coba dalam hal struktur jaringan syaraf tiruan. Karena dalam penelitian ini digunakan struktur jaringan multilayer layer perceptron (MLP), maka dapat dilakukan perubahan layer-layernya sehingga mampu memprediksi output proses yang baik. Perubahan layer-layer dimaksudkan agar didapatkan proses
training yang sesuai dengan karakteristik yang sesuai dan
mendapatkan output yang sesuai dengan target.
Struktur JST yang dicoba untuk diganti- ganti diantaranya adalah jumlah hidden node dan jumlah history
length. Batas iterasi yang dipakai dalam pemodelan ini adalah
500 iterasi. Namun pada proses training ini hanya mengalami proses iterasi sebanyak 78 iterasi. Pada proses training tidak hanya diketahui proses iterasi saja namun hal yang paling penting yang ada di dalam proses training adalah didapatkanya bobot update yang didapatkan yang akan berguna nantinya untuk proses validasi dan pembuatan aplikasi soft sensor specific gravity. Berikut ini adalah bobot jaringan yang diperoleh dari proses training. Bobot dari lapis
input ke lapis tersembunyi (W1):
Tabel 4.1 Data bobot w1 (lapis input ke lapis tersembunyi) Pada matrik bobot jaringan W1 terdapat 1 (dua) baris dan 6 (delapan) kolom matrik. Dapat dilihat bahwa jumlah baris menunjukkan banyaknya jumlah neuron pada lapisan tersembunyi, sedangkan jumlah kolom menunjukkan jumlah
node pada lapis input.
Berikut ini adalah bobot dari lapis tersembunyi ke lapis output (W2f):
Tabel 4.2 Data bobot W2 (lapis tersembunyi ke output) MATRIK BOBOT W2
1,0168 0,5584
Pada tabel 4.2, terdapat 1 (satu) baris matrik dengan 2 (tiga) kolom. Sama halnya dengan W2, jumlah baris menunjukkan banyaknya neuron pada lapis output, sedangkan banyaknya kolom menunjukkan jumlah neuron pada lapisan sebelumnya (lapisan tersembunyi). Kolom ke-1 merupakan
MATRIK BOBOT W1
0.9295 1.7803x10-5 -2.8135x10-4 9.3005x10-4 6.0342x10-4 -0.4954
bobot dari neuron lapisan tersembunyi, sedangkan kolom ke-2 merupakan bobot dari bias ke lapisan output.
Dengan bobot jaringan pada tabel 4.1 dan tabel 4.2, maka didapatkan output prediksi yang hampir mendekati
output proses dengan masukan yang sama. Berikut ini hasil
proses training sistem dengan menggunakan JST.
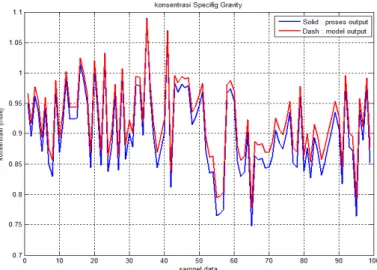
Gambar 18 Hasil training Specific Gravity output Kriteria hasil training adalah nilai RMSE (Root Mean
Square Error) dan nilai VAF (Variance Account For). RMSE
merupakan nilai error dari hasil model Jaringan Syaraf Tiruan. Nilai error merupakan penyimpangan nilai specific gravity output yang didapatkan dari hasil identifikasi terhadap output proses yang sebenarnya. Hasil proses training JST dapat dilihat pada gambar 4.10.
Dari uji coba tersebut (proses training), didapat nilai RMSE serta VAF. Nilai RMSE untuk nilai konsentrasi CO2
output adalah RMSE = 0.0086596. Sedangkan nilai VAF untuk nilai Specific Gravity output adalah 97.2381 %. Untuk semua nilai tersebut didapat pada kombinasi jumlah hidden
layer sebanyak 1 (satu) node dengan jumlah history length
sama dengan 1 (satu).
Untuk proses training dari struktur jaringan syaraf tiruan, hasil training yang didapatkan sangat bagus. Pada saat training, nilai RMSE dan VAF untuk masing-masing struktur sudah sangat bagus. Akan tetapi, struktur tersebut harus di lakukan validasi. Validasi dilakukan untuk mengetahui tingkat kehandalan dari struktur jaringan yang telah dibangun.
Validasi Jaringan Syaraf Tiruan
Pada proses validasi identifikasi digunakan nilai bobot W1 dan W2 dari hasil training. Proses validasi kali dilakukan menggunakan R2008b.
· Validasi dengan menggunakan MATLAB R2008b Validasi bertujuan untuk mengetahui kehandalan dari JST yang telah dibangun, apakah mampu mengidentifikasi input yang belum pernah diterima sebelumnya (dalam proses
training) serta mempunyai tingkat error yang cukup tinggi
agar bisa melihat apakah struktur yang telah didapatkan dalam proses training dapat mentraining data-data yang mempunyai tingkat error yang tinggi. Data yang digunakan untuk input JST yang akan digunakan dalam proses validasi adalah
di-traning-kan sama seperti pada jaringan syaraf tiruan yang
telah dibangun.
Hasil validasi dari training yang telah dilakukan dapat dilihat pada gambar 19
Gambar 19 Hasil validasi Specific gravity output Dari hasil validasi di atas didapatkan nilai RMSE untuk data testing Specifig Gravity output adalah 0.0193%. Sedangkan untuk nilai VAF konsentrasi Specifig Gravity output adalah 99.2300 %.
Jika dilihat dari hasil validasi yang dilakukan, dimana nilai RMSE dan VAF sudah bagus, karena jaringan syaraf tiruan sudah mampu mengidentifikasi proses yang belum pernah diterimanya pada saat training. Sehingga bobot hasil training bisa diterima sebagai model hasil training. Dan digunakan sebagai bobot untuk validasi.
4.3 Soft Sensor Aplikasi Specific Gravity
Pada proses perancangan soft sensor aplikasi jaringan syaraf tiruan ini didapatkan dari hasil proses training. Madsudnya adalah pembuatan soft sensor aplikasi ini menggunakan proses training yang telah didapatkan pola-pola dari pemodelan yang telah dilakukan pada proses training. Dalam pembuatanya diambil dari hasil bobot-bobot yaitu W1f dan W2f, bobot-bobot tersebut akan diimplementasikan dalam rumus 2.6. Rumus tersebut akan memberikan hasil output dari jaringan syaraf tiruan dari proses training yang akan mengalami proses perkalian dan penjumlahan dari bobot-bobot dengan input.
Bobot – bobot yaitu bobot W1f yang telah didapat proses training akan mengalami pengolahan dengan input sehingga didapatkan sebuah unit output namun sebelumnya telah mengalami proses aktivasi dengan menggunakan tangent hiperbolik. Selanjutnya, unit output masih mengalami proses pengolahan dengan bobot W2f yang telah didapatkan dari proses training. Sehingga didapatkan hasil output dari jaringan syaraf tiruan setelah sebelumnya telah mengalami proses aktifasi dengan fungsi linier.
Dalam pembuatan soft sensor aplikasi ini digunakan aplikasi GUI (Graphical User Interface) di dalam Matlab R2008b. Aplikasi ini akan membantu dalam pembuatan tampilan pada soft sensor sehingga mudah digunakan dalam lebih praktis untuk menghitung hasil outputan jaringan syaraf
tiruan yang telah mengalami proses pengolahan data seperti dijelaskan diatas. Berikut ini tampilan dari soft sensor aplikasi yang telah dibuat dengan menggunakan GUI.
Gambar 20 Soft Sensor aplikasi specifc gravity dalam gas compressor
Pada aplikasi ini mempunyai 2 buah kolom variable proses yaitu input proses dan output soft sensor. Masing – masing mewakili data yang telah diambil dalam proses pengambilan data sebelumnya. Pada kolom input proses mempunyai 5 buah sub-kolom yaitu flow gas incoming yang mewakili data data laju alir gas masukkan dalam compressor dalam satuan MSCFD, temperature Incoming mewakili data temperature gas yang masuk ke dalam compressor dalam satuan Fahrenheit, Pressure incoming mewakili data pressure
gas yang masui ke dalam compressor dalam satuan Psi, temperature outgoing mewakili temperature gas yang keluar
dari compressor serta pressure outgoing mewakili pressure gas yang keluar dari compressor. Setiap kolom-kolom tersebut dapat diisi sesuai dengan hasil pengamatan di lapangan yang nantinya akan diharapkan dapat diketahui hasil specific gravity dari compressor.
Dalam kolom output soft sensor tidak kita isi namun hasil dari perhitungan dari jaringan syaraf tiruan yang berasal dari pengolahan input yang telah disikan ke dalam kolom input proses dengan bobot yang telah didapatkan dalam proses
training.
5. Kesimpulan dan Saran 5.1 Kesimpulan
Berdasarkan penelitian yang telah dilakukan pada perancangan soft sensor Specific Gravity dalam gas
compressor di Petani gas plant menggunakan metode Jaringan
Syaraf Tiruan, maka dapat disimpulkan sebagai berikut : · Telah dirancang soft sensor Specific Gravity dalam gas
compressor di Petani gas plant menggunakan metode
jaringan syaraf tiruan dengan history length 1(satu) dan jumlah hidden node 1(satu).
· Hasil perancangan soft sensor konsentrasi Specific
Gravity dalam gas compressor di Petani gas plant
dengan menggunakan JST mampu mengestimasi dan memonitor Specific Gravity dengan nilai RMSE = 0.0086604 % mole dan VAF = 97.2381% untuk trainingnya, dan nilai RMSE = 0.0193 % mole dan VAF = 99.2300 % untuk validasi pemodelan.
5.2 Saran
Pada penelitian selanjutnya, perancangan soft sensor dapat menggunakan metode lain seperti metode fuzzy, rekonsiliasi data, dan lain-lain. Serta dapat digunakan sebagai estimator dalam sistem kontrol.
DAFTAR PUSTAKA
[1] Fortuna,Graziani,Rizzo and Xibilia, 2007: Soft Sensors for Monitoring and Control of Industrial Processes, Springer, London
[3] Widjiantoro, Bambang L; 2005; Handout Ajar Jaringan syaraf Tiruan; Jurusan Teknik Fisika; ITS .
[4] Norgaard, Magnus; 2000; Neural Network for Modelling and Control of Dynamic Systems, Verlag Springer; London.
[5] Team Human Resource Sumatra, 2005 : Production Operation ( Modul 4A ) Operation & Maintenance Certification, PT. Chevron Pasific Indonesia. [6] Riazi, M.R, “ Characterization and Properties of
Petroleum Fractions” AMERICAN SOCIETY FOR
TESTING AND MATERIALS, West Conshohocken,
2005.
[8] Danesh, Ali, “ PVT and Phase Behaviour of Petroleum Reservoir Fluids”, Elsevier Science B.V, USA, 1998
[9] Tarek, Ahmad, “ Reservoir Engineering Handbook Third Edition”, Elsevier Science B.V, USA, 2006
BIODATA PENULIS
Nama : Fatwa Dhana Nugraha TTL : Surabaya, 15 Februari 1987 Alamat : Putat Gede Baru 3 Surabaya Email : [email protected] Pendidikan :
§ SD KHADIJAH II Surabaya (1993 - 1999) § SLTP TA’MIRIAH Surabaya (1999 - 2002)
§ SMUN 1 Surabaya (2002 - 2005)
![Gambar 3 a. Sel otak manusia. b. Struktur Jaringan syaraf tiruan [Norgaard, 2000]](https://thumb-ap.123doks.com/thumbv2/123dok/4825475.3456684/3.892.502.829.578.1007/gambar-sel-manusia-struktur-jaringan-syaraf-tiruan-norgaard.webp)
![Gambar 5 Fungsi aktifasi tangent hiperbolik [Norgaard, 2000]](https://thumb-ap.123doks.com/thumbv2/123dok/4825475.3456684/4.892.503.863.920.1081/gambar-fungsi-aktifasi-tangent-hiperbolik-norgaard.webp)