BAB 3
PERBANDINGAN GEOMETRI DATA
OBJEK TIGA DIMENSI
Pada bab ini akan dijelaskan tentang perbandingan tingkat kualitas data, terutama perbandingan dari segi geometri, selain itu juga akan dibahas mengenai efektifitas dan efisiensi pengambilan dan pengolahan data serta biaya dari metode pengambilan data objek 3D menggunakan metode Fotogrametri Rentang Dekat Terrestrial Laser Scanner, dan Electronic Total Station.
3.1 Alur Penelitian
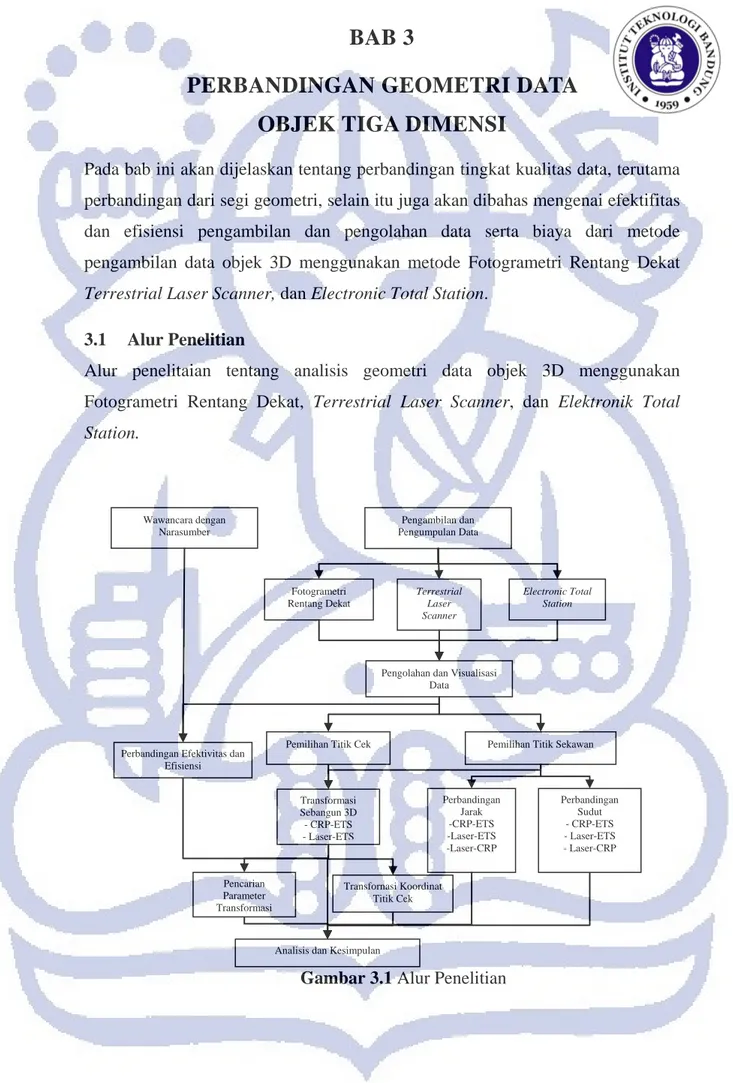
Alur penelitaian tentang analisis geometri data objek 3D menggunakan Fotogrametri Rentang Dekat, Terrestrial Laser Scanner, dan Elektronik Total Station.
Gambar 3.1 Alur Penelitian
Transfornasi Koordinat Titik Cek Perbandingan Efektivitas dan
Efisiensi
Pengolahan dan Visualisasi Data
Pemilihan Titik Sekawan
Transformasi Sebangun 3D - CRP-ETS - Laser-ETS
Analisis dan Kesimpulan
Pengambilan dan Pengumpulan Data Perbandingan Jarak -CRP-ETS -Laser-ETS -Laser-CRP Perbandingan Sudut - CRP-ETS - Laser-ETS - Laser-CRP Fotogrametri Rentang Dekat Terrestrial Laser Scanner Electronic Total Station Wawancara dengan Narasumber
Pemilihan Titik Cek
Pencarian Parameter Transformasi
Tahap pengumpulan data merupakan suatu tahap yang bertujuan untuk mendapatkan data yang dibutuhkan untuk proses analisis data geometri objek 3D . tahap pengolahan data bertujuan untuk menjadikan data dasar dari metode yang digunakan dalam proses analisis data geometri agar siap dilakukan perbandingan sedangkan visualisasi data bertujuan untuk mempermudah penentuan titik sekutu. Tahap pencarian titik sekutu antara data Fotogrametri Rentang Dekat, Laser Scanner, dan Electronic Total Station berfungsi untuk memastikan posisi titik dalam suatu model 3D merupakan posisi yang sama pada sistem yang berbeda, sedangkan titik-titik yang digunakan sebagai titik cek akan digunakan untuk proses perbandingan kualitas koordinat. Tahap perbandingan posisi titik, sudut, jarak, efisiensi dan efektifitas berfungsi untuk mengetahui perbedaan kualitas dari metode Fotogrametri Rentang Dekat, Terrestrial Laser Scanner, dan Electronic Total Station,serta dari segi efektifitas dan efisiensi, dapat mengetahui metode yang tepat untuk pengambilan data untuk pemodelan objek 3D.
3.2 Tahap Pengumpulan Data
Data yang akan digunakan untuk analisis geometri data objek tiga dimensi diperoleh dari berbagai sumber. Untuk data yang digunakan dalam proses analisis geometri didapat dari pengukuran, sedangkan data yang digunakan untuk analisis dari segi efektifitas dan efisiensi dapat diperoleh dari berbagai sumber, seperti informasi dari perusahaan survei, internet.
3.3 Pengolahan dan Visualisasi Data
Data yang digunakan dalam proses analisis geometri memiliki beberapa ketentuan agar dapat dibandingkan. Ketentuan-ketentuan tersebut terutama ditujukan untuk mempermudah penyeleksian titik dalam proses pencarian titik-titik sekutu. Pada analisis geometri data tiga dimensi ini data yang diperoleh dari berbagai metode haruslah diproses terlebih dahulu menjadi data koordinat 3D, kemudian dilakukan visualisasi dalam posisi 3D. Proses visualisasi dari masing-masing data menggunakan perangkat lunak yang berbeda-beda. Dalam rangka memvisualisasikan data pengukuran pastilah semua data harus dalam format posisi koordinat tiga dimensi agar dalam satuan yang sama (meter). Penyamaan format dan satuan di maksudkan agar dapat dilakukan proses perbandingan.
3.3.1 Visualisasi Data Fotogrametri Rentang Dekat
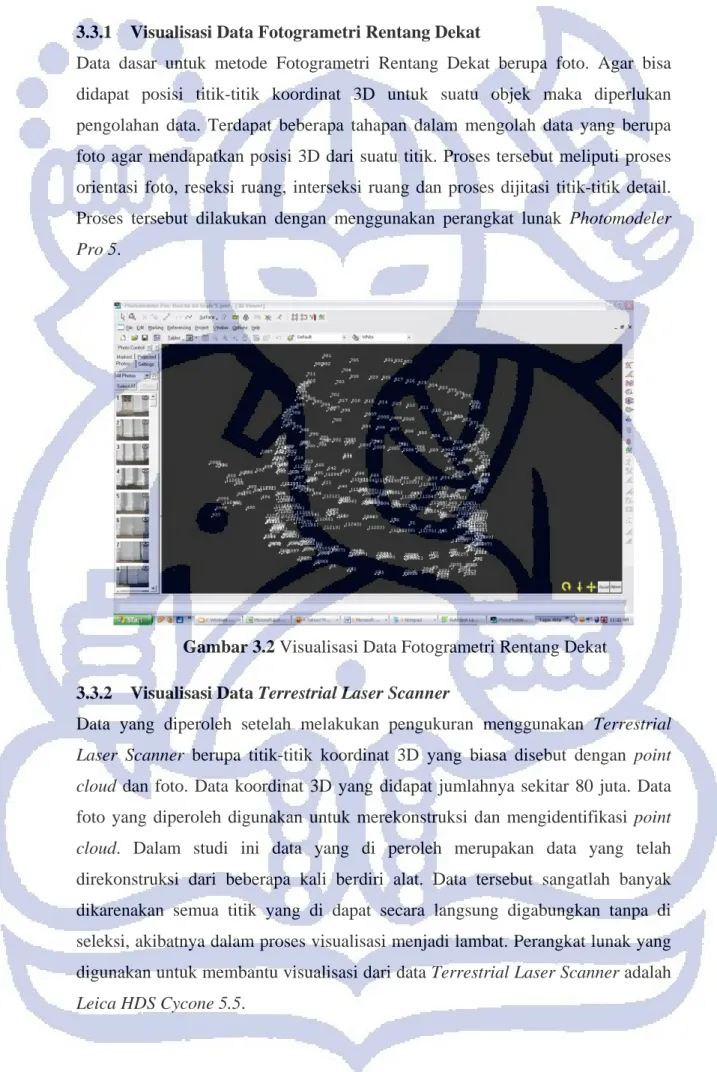
Data dasar untuk metode Fotogrametri Rentang Dekat berupa foto. Agar bisa didapat posisi titik-titik koordinat 3D untuk suatu objek maka diperlukan pengolahan data. Terdapat beberapa tahapan dalam mengolah data yang berupa foto agar mendapatkan posisi 3D dari suatu titik. Proses tersebut meliputi proses orientasi foto, reseksi ruang, interseksi ruang dan proses dijitasi titik-titik detail. Proses tersebut dilakukan dengan menggunakan perangkat lunak Photomodeler Pro 5.
Gambar 3.2 Visualisasi Data Fotogrametri Rentang Dekat
3.3.2 Visualisasi Data Terrestrial Laser Scanner
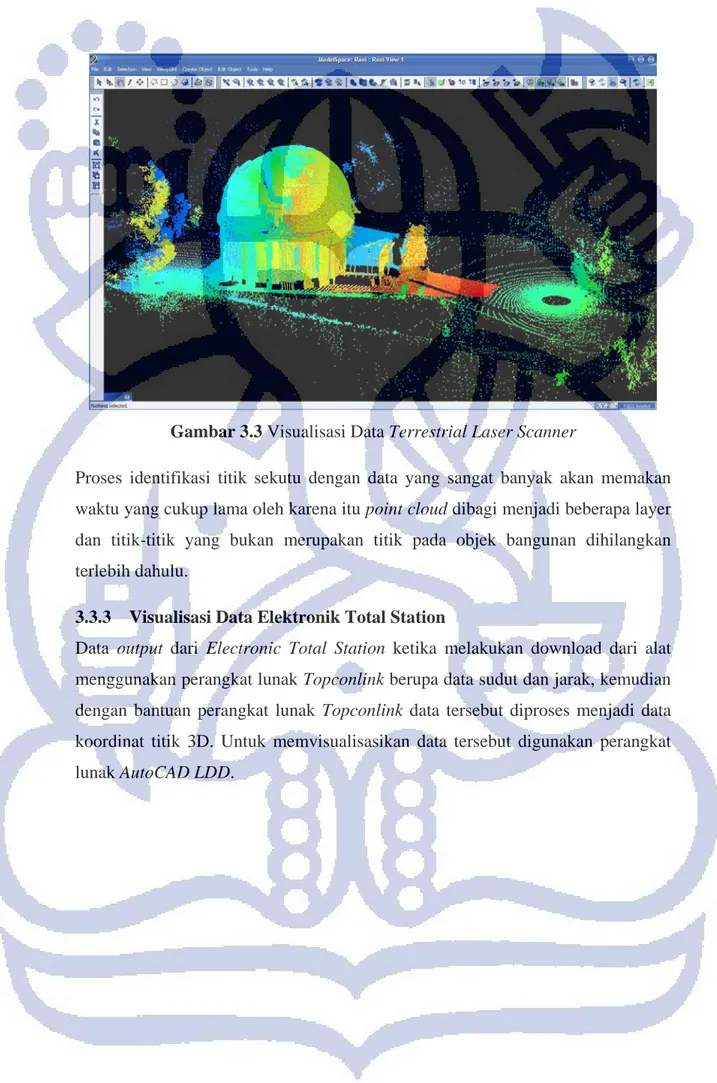
Data yang diperoleh setelah melakukan pengukuran menggunakan Terrestrial Laser Scanner berupa titik-titik koordinat 3D yang biasa disebut dengan point cloud dan foto. Data koordinat 3D yang didapat jumlahnya sekitar 80 juta. Data foto yang diperoleh digunakan untuk merekonstruksi dan mengidentifikasi point cloud. Dalam studi ini data yang di peroleh merupakan data yang telah direkonstruksi dari beberapa kali berdiri alat. Data tersebut sangatlah banyak dikarenakan semua titik yang di dapat secara langsung digabungkan tanpa di seleksi, akibatnya dalam proses visualisasi menjadi lambat. Perangkat lunak yang digunakan untuk membantu visualisasi dari data Terrestrial Laser Scanner adalah Leica HDS Cycone 5.5.
Gambar 3.3 Visualisasi Data Terrestrial Laser Scanner
Proses identifikasi titik sekutu dengan data yang sangat banyak akan memakan waktu yang cukup lama oleh karena itu point cloud dibagi menjadi beberapa layer dan titik-titik yang bukan merupakan titik pada objek bangunan dihilangkan terlebih dahulu.
3.3.3 Visualisasi Data Elektronik Total Station
Data output dari Electronic Total Station ketika melakukan download dari alat menggunakan perangkat lunak Topconlink berupa data sudut dan jarak, kemudian dengan bantuan perangkat lunak Topconlink data tersebut diproses menjadi data koordinat titik 3D. Untuk memvisualisasikan data tersebut digunakan perangkat lunak AutoCAD LDD.
Gambar 3.4 Visualisasi Data Elektonic Total Station
Pada saat menampilkan titik-titik menggunakan perangkat lunak AutoCAD LDD dilakukan per bagian atau dilakukan pada tiap kali berdiri alat (ETS) hal ini bertujuan untuk mempermudah identifikasi titik-titik sekutu. Selain itu menampilkan titik-titik per bagian ditujukan juga untuk mempercepat kinerja komputer.
3.4 Tahap Pencarian Titik Sekawan, antara Sistem Fotogrametri Rentang Dekat, Terrestrial Laser Scanner dan Electronic Total Station.
Titik sekawan merupakan suatu titik yang posisinya terdapat pada beberapa sistem koordinat yang berbeda. Dalam kaitannya dengan analisis geometri data objek tiga dimensi titik sekawan ini mutlak dibutuhkan untuk membandingkan data dari Fotogrametri Rentang Dekat, Terrestrial Laser Scanner dan Electronic Total Station. Pada umumnya titik sekawan digunakan untuk mencari parameter transformasi, tetapi dalam studi ini titik sekawan digunakan untuk mengetahui kualitas data dari berbagai metode.
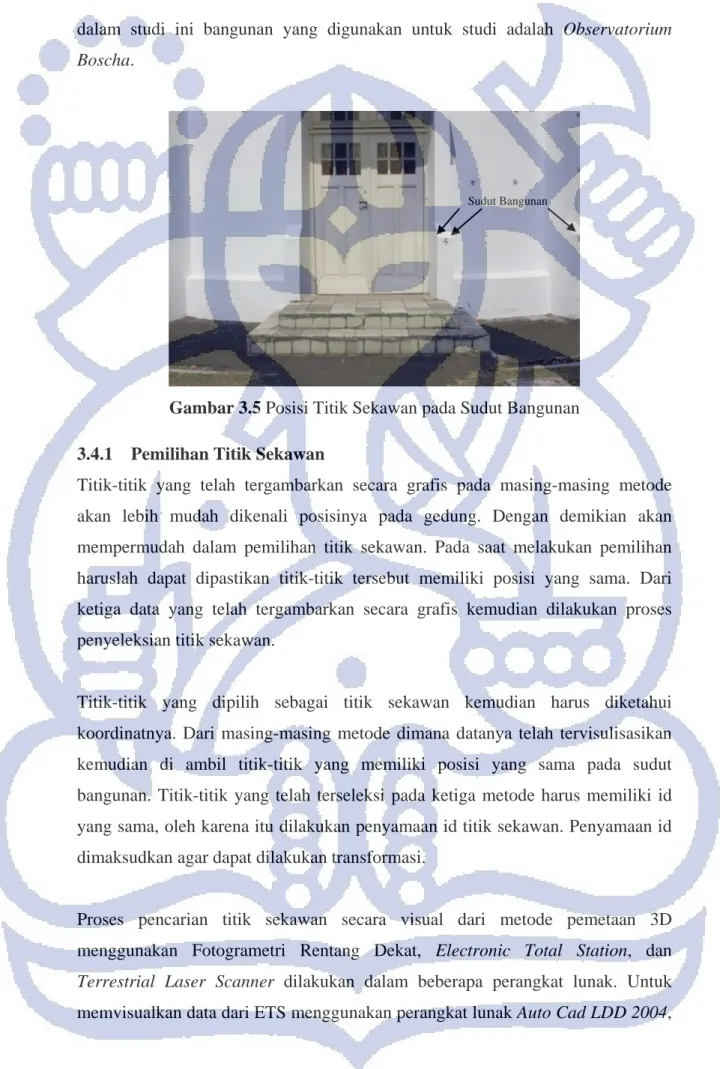
Pencarian titik sekawan dilakukan secara visual yang merupakan suatu fitur unik dari suatu bangunan. Agar dapat dipastikan suatu titik sekawan memiliki posisi yang sama maka diambil titik-titik yang merupakan titik sudut pada bangunan,
dalam studi ini bangunan yang digunakan untuk studi adalah Observatorium Boscha.
Gambar 3.5 Posisi Titik Sekawan pada Sudut Bangunan
3.4.1 Pemilihan Titik Sekawan
Titik-titik yang telah tergambarkan secara grafis pada masing-masing metode akan lebih mudah dikenali posisinya pada gedung. Dengan demikian akan mempermudah dalam pemilihan titik sekawan. Pada saat melakukan pemilihan haruslah dapat dipastikan titik-titik tersebut memiliki posisi yang sama. Dari ketiga data yang telah tergambarkan secara grafis kemudian dilakukan proses penyeleksian titik sekawan.
Titik-titik yang dipilih sebagai titik sekawan kemudian harus diketahui koordinatnya. Dari masing-masing metode dimana datanya telah tervisulisasikan kemudian di ambil titik-titik yang memiliki posisi yang sama pada sudut bangunan. Titik-titik yang telah terseleksi pada ketiga metode harus memiliki id yang sama, oleh karena itu dilakukan penyamaan id titik sekawan. Penyamaan id dimaksudkan agar dapat dilakukan transformasi.
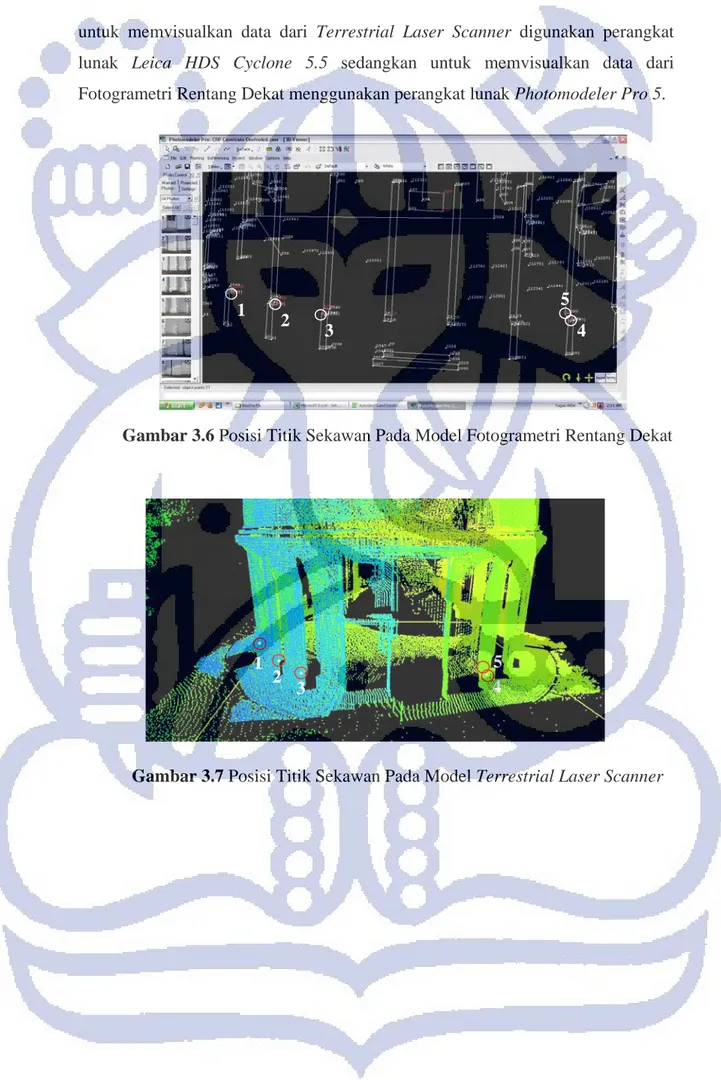
Proses pencarian titik sekawan secara visual dari metode pemetaan 3D menggunakan Fotogrametri Rentang Dekat, Electronic Total Station, dan Terrestrial Laser Scanner dilakukan dalam beberapa perangkat lunak. Untuk memvisualkan data dari ETS menggunakan perangkat lunak Auto Cad LDD 2004,
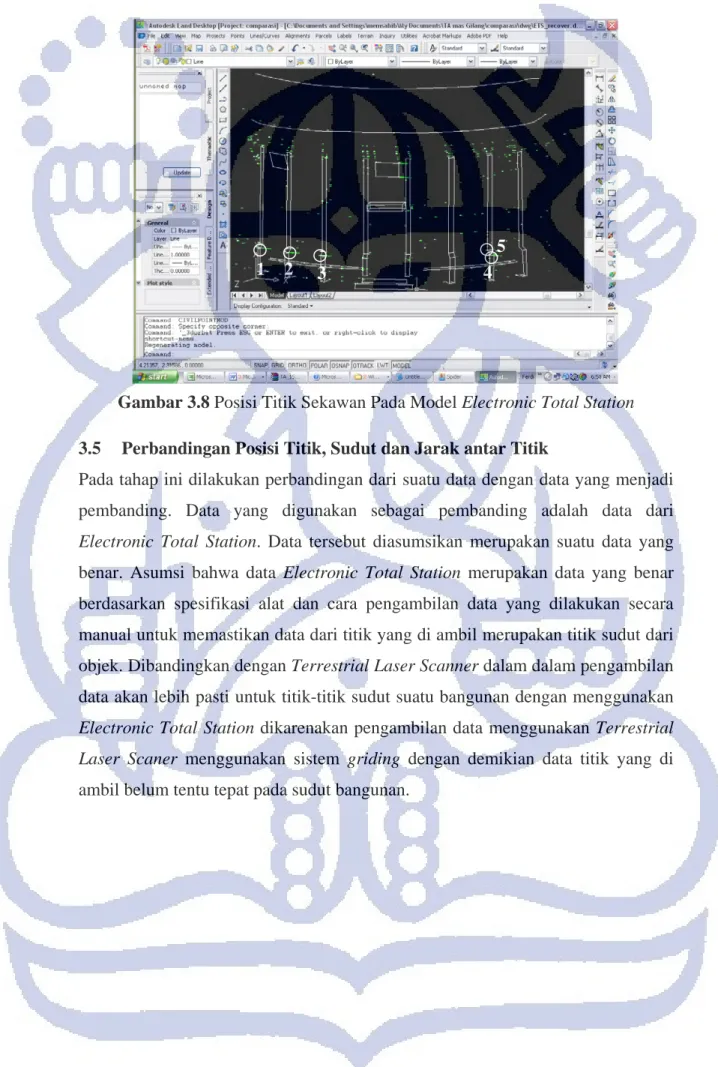
untuk memvisualkan data dari Terrestrial Laser Scanner digunakan perangkat lunak Leica HDS Cyclone 5.5 sedangkan untuk memvisualkan data dari Fotogrametri Rentang Dekat menggunakan perangkat lunak Photomodeler Pro 5.
Gambar 3.6 Posisi Titik Sekawan Pada Model Fotogrametri Rentang Dekat
Gambar 3.7 Posisi Titik Sekawan Pada Model Terrestrial Laser Scanner
1 2 3 4 5 1 2 3 4 5
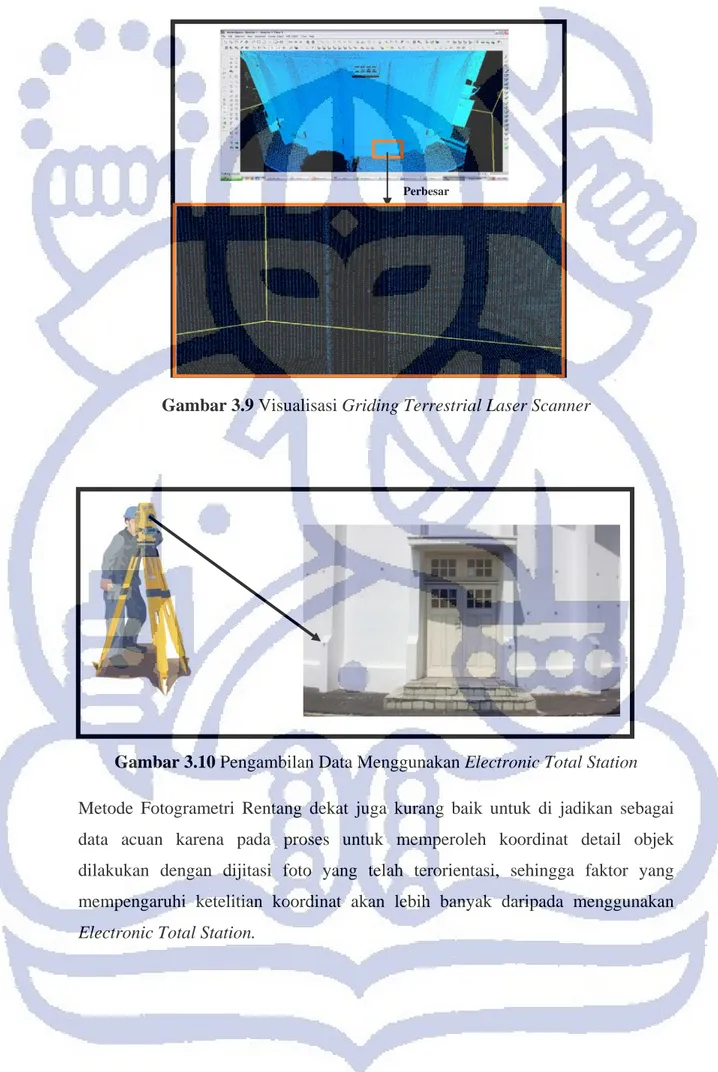
Gambar 3.8 Posisi Titik Sekawan Pada Model Electronic Total Station
3.5 Perbandingan Posisi Titik, Sudut dan Jarak antar Titik
Pada tahap ini dilakukan perbandingan dari suatu data dengan data yang menjadi pembanding. Data yang digunakan sebagai pembanding adalah data dari Electronic Total Station. Data tersebut diasumsikan merupakan suatu data yang benar. Asumsi bahwa data Electronic Total Station merupakan data yang benar berdasarkan spesifikasi alat dan cara pengambilan data yang dilakukan secara manual untuk memastikan data dari titik yang di ambil merupakan titik sudut dari objek. Dibandingkan dengan Terrestrial Laser Scanner dalam dalam pengambilan data akan lebih pasti untuk titik-titik sudut suatu bangunan dengan menggunakan Electronic Total Station dikarenakan pengambilan data menggunakan Terrestrial Laser Scaner menggunakan sistem griding dengan demikian data titik yang di ambil belum tentu tepat pada sudut bangunan.
1 2 3 4
Gambar 3.9 Visualisasi Griding Terrestrial Laser Scanner
Gambar 3.10 Pengambilan Data Menggunakan Electronic Total Station
Metode Fotogrametri Rentang dekat juga kurang baik untuk di jadikan sebagai data acuan karena pada proses untuk memperoleh koordinat detail objek dilakukan dengan dijitasi foto yang telah terorientasi, sehingga faktor yang mempengaruhi ketelitian koordinat akan lebih banyak daripada menggunakan Electronic Total Station.
Penggunaan data Electronic Total Station merupakan data yang dianggap benar juga berdasarkan ketelitian komponen koordinat titik yang dibentuk. Untuk nilai ketelitian titik pada Electronic Total Station dapat berdasarkan dari data ketelitian sudut dan jarak yang dihitung dengan perambatan kesalahan untuk komponen X, komponen Y, dan omponen Z dengan persamaan (3.1) (berdasarkan Wolf & Ghilani, 1996)
(3.1)
Keterangan : SX, SY, SZ = Perambatan kesalahan pada komponen X’, Y’ dan
Z’
d = Jarak datar dari alat ke objek α = Sudut mendatar
m = Sudut miring
Persamaan X’,Y’ mengacu pada persamaan 2.4 Persamaan Z’ mengacu pada persamaan 2.5 a
Apabila sudut yang dibentuk adalah sebesar 450 ∂ ∂ + ∂ ∂ = ∂ ∂ + ∂ ∂ = ∂ ∂ + ∂ ∂ = 2 2 ' 2 2 ' 2 2 ' ' ' ' ' . ' m d Z d Y d X S m Z S d Z S S Y S d Y S S x X S d X S α α α
untuk sudut miring (m) dan sudut mendatar dengan jarak sebesar 20 m maka perambatan kesalahan pada komponen x sebesar ± 3.55 mm, komponen y sebesar ± 3.55 mm, kmponen z sebesar ± 7.07 mm.
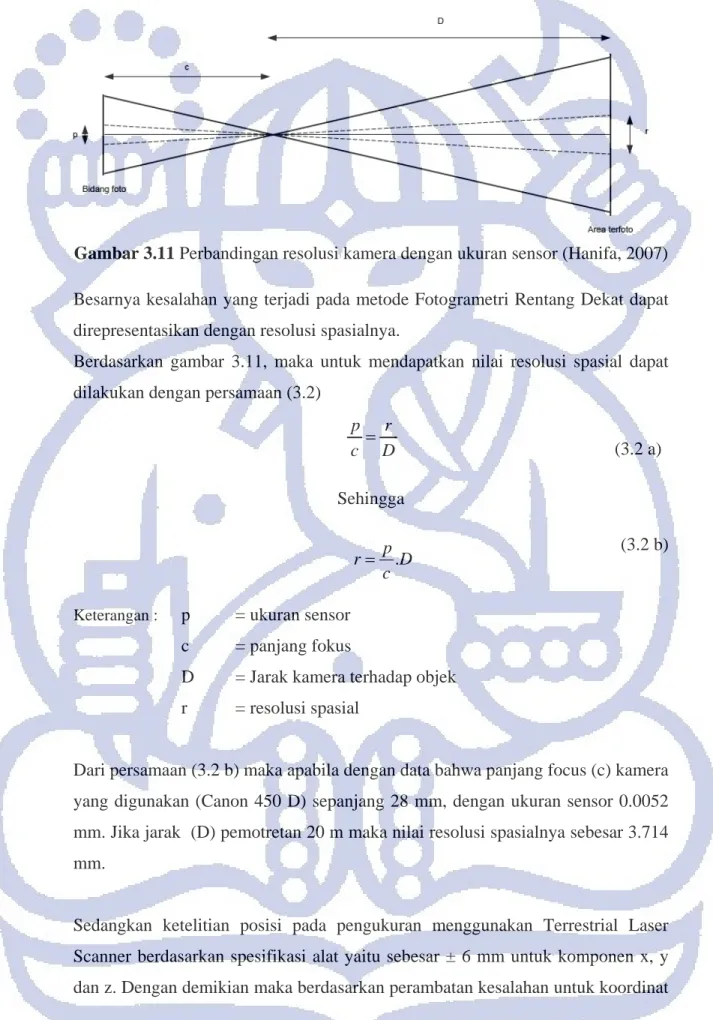
Gambar 3.11 Perbandingan resolusi kamera dengan ukuran sensor (Hanifa, 2007)
Besarnya kesalahan yang terjadi pada metode Fotogrametri Rentang Dekat dapat direpresentasikan dengan resolusi spasialnya.
Berdasarkan gambar 3.11, maka untuk mendapatkan nilai resolusi spasial dapat dilakukan dengan persamaan (3.2)
D r cp = (3.2 a) Sehingga D c p r= . (3.2 b)
Keterangan : p = ukuran sensor c = panjang fokus
D = Jarak kamera terhadap objek r = resolusi spasial
Dari persamaan (3.2 b) maka apabila dengan data bahwa panjang focus (c) kamera yang digunakan (Canon 450 D) sepanjang 28 mm, dengan ukuran sensor 0.0052 mm. Jika jarak (D) pemotretan 20 m maka nilai resolusi spasialnya sebesar 3.714 mm.
Sedangkan ketelitian posisi pada pengukuran menggunakan Terrestrial Laser Scanner berdasarkan spesifikasi alat yaitu sebesar ± 6 mm untuk komponen x, y dan z. Dengan demikian maka berdasarkan perambatan kesalahan untuk koordinat
meka data yang terbaik untuk dijadikan acuan adalah data dari Electronic Total Station.
Dalam melakukan perbandingan dari tiga metode pemodelan objek 3D maka dilakukan beberapa jenis perbandingan yang antara lain perbandingan posisi titik, sudut yang dibentuk antara tiga buah titik, dan jarak antar dua titik. Untuk membantu proses perbandingan digunakan beberapa perangkat lunak, antara lain perangkat lunak Australis, Auto CAD LDD 2004 dan Microsoft Office Excel. 3.5.1 Perbandingan Posisi Titik
Posisi suatu titik dalam model 3D dinyatakan dalam sistem koordinat 3D. Data dari posisi titik 3D yang didapat dari metode yang berbeda akan memiliki sistem koordinat yang berbeda pula. Untuk mengetahui kualitas dari data hasil pengukuran dari metode Fotogrametri Rentang Dekat, Electronic Total Station, dan Terrestrial Laser Scanner terutama untuk posisi titik, maka dilakukan transformasi koordinat sebangun 3D. Posisi titik-titik yang digunakan dalam proses perbandingan ditunjukkan pada gambar (3.12) dimana titik 1,2,3, 4, dan 5 merupakan titik sekawan sedangkan titik 6,7,8 dan 9 merupakan titik cek.
Gambar 3.12 Posisi Titik Sekawan dan Titik Cek
3 6 4
1 7
2 9
3.5.1.1 Penghitungan Parameter Transformasi Sebangun 3D
Transformasi sebangun 3D merupakan suatu proses untuk mencari nilai koordinat 3D dari suatu titik dari suatu sistem koordinat ke suatu sistem koordinat lainnya yang merupakan suatu sistem tujuan ((x,y,z)(X,Y,Z)). Penggunaan transformasi sebangun pada proses penghitungan parameter transformasi bertujuan agar memperoleh parameter transformasi yang akan digunakan untuk mentransformasi titik cek. Penghitungan parameter transformasi menggunakan persamaan (3.1) (Berdasarkan Cooper & Robson, 1996).
+ = 0 0 0 . z y x z y x R Z Y X λ (3.1)
Keterangan : X,Y,Z : Koordinat hasil transformasi λ : Faktor skala
R : Matrik rotasi pada persamaan (2.2) X0 : Translasi ke arah x
Y0 : Translasi ke arah y
Z0 : Tanslasi ke arah z
Sistem koordinat yang menjadi sistem tujuan dalam transformasi sebangun 3D ini adalah sistem koordinat dengan Electronic Total Station. Untuk melakukan trasformasi 3D menggunakan perangkat lunak Australis dibutuhkan input file yang memiliki extension .xyz. File ini dapat dibuat dengan menggunakan perangkat lunak notepad. Format file terdiri dari id titik, koordinat x, koordinat y, dan koordinat z. Semua data titik sekawan dari ke tiga sistem koordinat disusun dalam format yang sama dan dalam ekstension file .xyz.
Tabel 3.1 Format File Koordinat Titik pada Proses Transformasi Koordinat
Pada proses transformasi koordinat digunakan 5 titik sekawan, dikarenakan setiap titik koordinat dapat menghasilkan 3 persamaan sehingga dengan 5 titik dapat diperoleh 15 persamaan. Dengan 15 buah persamaan tersebut, parameter transformasi yang berjumlah 7 dapat dipecahkan dan masih terdapat ukuran lebih. Hasil yang diperoleh setelah melakukan transformasi koordinat menggunakan perangkat lunak Australis adalah dapat diketahui Root Mean Square (RMS) residual dari trasformasi koordinat. RMS residual ini merepresentasikan kualitas dari suatu data dan tingkat akurasi dari data. Dalam kaitannya dengan transformasi sebangun 3D dapat dinilai seberapa baik koordinat dari suatu metode pemodelan 3D yang dibandingan dengan sistem koordinat tujuan. Nilai RMS dapat dihitung dengan persamaan (3.2) (Berdasarkan Kusumadarma, 2008).
(
)
n x xi∑
− (3.2)Keterangan : xi = Koordinat titik
Proses transformasi sebangun 3D dilakukan beberapa kali. Transformasi yang pertama adalah mentransformasi data yang diperoleh dari pengukuran menggunakan Terrestrial Laser Scanner yang ditransformasi ke sistem koordinat
yang akan dibandingkan x = Koordinat pembanding n = Jumlah data Id X (m) Y (m) Z (m) 1. 13.615 -5.748 1.319 2. 17.211 -1.241 1.321 3. 17.131 -1.092 1.117 4. 13.369 -8.068 1.297 5. 13.204 -8.037 1.135 6. 13.504 -9.829 1.270 7. 13.368 -9.865 1.112 8. 14.215 -11.721 1.247 9. 14.090 -11.787 1.085
dari data yang diperoleh dengan menggunakan Electronic Total Station. Transformasi yang kedua adalah transformasi dari sistem koordinat Fotogranetri Rentang Dekat ke koordinat Electronic Total Station.
Tabel 3.2 Parameter Transformasi Koordinat Sebangun 3D dari Sistem Koordinat Fotogrametri Rentang Dekat ke ETS
No. Parameter Nilai Parameter Standard Error
1. Xo -13.3798 m 0.0823 m 2. Yo 5.8048 m 0.0808 m 3. Zo 5.2246 m 0.2699 m 4. λ -1.0031 m 0.0026 m 5. ω -165.45152º 0.28858º 6. Φ 18.30042º 0.98184º 7. κ 7.39746º 0.16979º
Tabel 3.3 Parameter Transformasi Koordinat Sebangun 3D dari Sistem Koordinat Terrestrial Laser Scanner ke ETS
No. Parameter Nilai Parameter Standard Error
1. Xo 2034.4391 m 0.1440 m 2. Yo 1045.0830m 0.1500 m 3. Zo 103.0905m 0.8868 m 4. λ 0.9952m 0.0080 m 5. ω -178.87020º 2.48821º 6. Φ -0.12397º 1.91186º 7. κ 147.85442º 0.45997º
Tabel 3.4 Koordinat Titik Sekawan Fotogrametri Rentang Dekat Hasil Transformasi
Id
Koordinat Hasil Transformasi Residu
X (m) Y (m) Z (m) VX (m) VY (m) VZ (m) 1 14.12135 -11.7953 1.08538 0.03135 -0.00827 0.00038 2 13.38557 -9.87089 1.11124 0.01757 -0.00589 -0.00076 3 13.14434 -8.00601 1.13573 -0.05966 0.03099 0.00073 4 17.13742 -1.09367 1.11808 0.00642 -0.00167 0.00108 5 17.21533 -1.25617 1.31957 0.00433 -0.01517 -0.00143 Rata-rata 0.02386 0.01239 0.00087
Tabel 3.5 Koordinat Titik Sekawan Terrestrial Laser Scanner Hasil Transformasi
Id
Koordinat Hasil Transformasi Residu
X (m) Y (m) Z (m) VX (m) VY (m) VZ (m) 1 14.11715 -11.7966 1.09407 0.02715 -0.00962 0.00907 2 13.38545 -9.85608 1.10618 0.01745 0.00892 -0.00582 3 13.14597 -8.02736 1.13094 -0.05803 0.00964 -0.00406 4 17.14736 -1.12852 1.27815 0.01636 -0.03652 0.16115 5 17.20807 -1.21342 1.16065 -0.00293 0.02758 -0.16035 Rata-rata 0.02438 0.01845 0.06809
3.4.1.1.1 Transformasi Titik Cek
Transformasi titik cek ini berfungsi untuk mengetahui tingkat akurasi suatu data relatif terhadap data yang dianggap benar. Kualitas data ini direpresentasikan oleh nilai Root Mean Square (RMS) Residual masing-masing titik yang menyatakan akurasi antar data.Parameter transformasi yang digunakan adalah parameter transformasi yang didapat dari transformasi titik sekawan .
Tabel 3.6 Hasil Transformasi Titik Cek Model Pemetaan Fotogrametri Rentang Dekat
Id
Koordinat Hasil Transformasi Selisih CRP-ETS X (m) Y (m) Z (m) ΔX (m) ΔY (m) ΔZ (m) 6 13.596 -5.739 1.321 -0.019 0.009 0.002 7 13.285 -8.011 1.296 -0.084 0.057 -0.001 8 13.523 -9.832 1.271 0.019 -0.003 0.001 9 14.240 -11.727 1.247 0.025 -0.006 0.000 RMS 0.046 0.029 0.001
a
X Z
Y
b
Tabel 3.7 Hasil Transformasi Titik Cek Model Pemetaan Terrestrial Laser Scanner.
Id
Koordinat Hasil Transformasi Selisih Laser-ETS X (m) Y (m) Z (m) ΔX (m) ΔY (m) ΔZ (m) 6 13.602 -5.771 0.995 -0.013 -0.023 -0.324 7 13.322 -8.025 0.943 -0.047 0.043 -0.354 8 13.541 -9.810 0.905 0.037 0.019 -0.365 9 14.233 -11.714 0.917 0.018 0.007 -0.330 RMS 0.032 0.026 0.344 3.5.2 Perbandingan Sudut
Proses perbandingan sudut merupakan salah satu cara untuk membandingkan dari segi geometri dari berbagi metode pemodelan 3D. Sudut yang dihitung adalah sudut antara tiga titik yang sama pada ketiga sistem koordinat yang berbeda. Suatu sudut terbentuk dari tiga buah titik, oleh karena itu perbandingan sudut dapat dilakukan apabila minimal terdapat tiga buah titik. Dalam perbandingan sudut ini menggunakan 9 buah titik. Titik-titik koordinat tersebut merupakan titik sekawan yang digunakan dalam trasformasi koordinat sebangun 3D dan titik-titk check point. Pengukuran sudut dilakukan secara numeris dengan perangkat lunak Microsoft Office Exel dengan menggunakan prinsip perkalian vektor menggunakan dot product (3.3)(Berdasarkan Purcell, 2003).
Gambar 3.13 Ilustrasi Vektor
θ cos . .b a b a = (3.3 a) Maka = − b a b a . . cos 1 θ (3.3 b)
Sehingga + + + + + + + = − 2 3 2 2 2 1 2 3 2 2 2 1 3 3 2 2 1 1 1 ( ) ( . . . cos b b b a a a b a b a b a θ Keterangan : = Vektor a = Vektor b = Panjang Vektor a = Panjang Vektor b = Komponen vektor a = Komponen Vektor b
Tabel 3.8 Besar Sudut Pada Model Pemetaan Menggunakan Electronic Total Station, Terrestrial Laser Scanner dan Fotogrametri Rentang Dekat.
No. Sudut ETS Laser CRP
1 2.3.1 8°9'57.9" 6°59'26.9" 7°4'41.5" 2 2.3.4 145°22'41.3" 142°25'43.8" 142°36'0.9" 3 2.3.5 144°20'59.5" 141°44'8.0" 141°32'2.3" 4 2.3.6 164°14'47.3" 160°40'33.9" 160°57'54.7" 5 2.3.7 79°13'57.2" 84°51'59.7" 84°25'54.8" 6 2.3.8 6°37'6.3" 8°3'45.6" 6°31'58.9" 7 2.3.9 10°29'44.2" 9°16'29.8" 9°20'31.7" 8 1.4.3 13°38'56.9" 14°15'19.6" 10°44'43.1" 9 1.4.6 21°38'4.0" 21°34'41.6" 21°9'56.1" 10 1.4.7 12°50'51.6" 13°14'2.0" 10°19'5.3" 11 3.1.2 7°17'41.2" 6°12'50.8" 6°27'32.6" 12 3.1.4 29°10'13.7" 30°18'19.6" 30°11'59.2" 13 3.1.5 29°46'42.0" 30°43'44.8" 30°48'47.1" 14 3.1.6 8°54'52.5" 9°40'28.0" 9°37'13.5" 15 3.1.7 3°22'52.1" 3°46'25.2" 3°6'45.1" 16 3.1.8 5°33'39.1" 6°1'27.1" 5°5'44.0" 17 3.1.9 79°55'52.3" 77°23'40.4" 79°33'5.9" 18 5.6.1 136°52'22.0" 136°41'11.0" 136°5'52.4" 19 5.6.2 144°44'51.3" 144°32'21.2" 143°54'43.2" 20 5.6.3 151°16'7.9" 152°37'2.5" 152°1'23.8" 21 5.6.4 2°31'5.6" 1°30'26.0" 2°32'2.2" 22 5.6.7 147°27'49.4" 148°43'17.5" 148°53'16.9" 23 5.6.8 142°58'3.4" 142°30'51.3" 142°7'37.9" 24 5.6.9 135°40'28.4" 135°35'21.6" 134°57'14.2" a b b a 3 2 1,a ,a a 3 2 1,b ,b b
3.5.3 Perbandingan Jarak
Perbandingan untuk menunjukkan bentuk geometri suatu bidang selain ditunjukkan dengan ukuran sudut terdapat juga ukuran jarak. Ukuran jarak yang di bandingkan dalam studi ini diambil jarak ruang antardua buah titik. Jarak tersebut dihitung secara numeris dengan persamaan (3.4)(Purwohardjo, 1986).
(
)
(
)
(
)
(
2)
1 2 2 1 2 1 2 12 X X Y2 Y Z Z D = − + − + − (3.4)Keterangan : X1, Y1, Z1 : Koordinat titik 1
X2, Y2, Z2 : Koordinat titik 2
Dari hasil perhitungan menggunakan perangkat lunak Microsoft Office Excel diperoleh hasil yang ditunjukkan pada tabel 3.8. Pada data Fotogrametri rentang dekat jarak yang diambil harus bukan merupakan jarak yang digunakan sebagai constraint apabila jarak yang digunakan adalah jarak yang digunakan sebagi constraint maka hasil perbandingan jaraknya akan sangat baik atau selisihnya akan sangat kecil. Terdapat 36 jarak yang digunakan untuk perbandingan antara metode Fotogrametri Rentang Dekat, Tererrestrial Laser Scanner, dan Electronic Total Station.
Tabel 3.9 Jarak Antara Dua Titik Koordinat dari Data Electronic Total Station, Terrestrial Laser Scanner dan Fotogrametri Rentang Dekat (Pertama)
No. Jarak ETS (m) Laser (m) CRP (m)
1 1-2 2.0533 2.0839 2.0539 2 1-3 3.8536 3.9113 3.9015 3 1-4 11.1190 11.1451 11.0843 4 1-5 11.0007 11.0787 10.9527 5 1-6 6.0622 6.0778 6.0654 6 1-7 3.7942 3.8760 3.8696 7 1-8 2.0522 2.0872 2.0548 8 1-9 0.2150 0.2278 0.2113 9 2-3 1.8355 1.8534 1.8750 10 2-4 9.5460 9.5512 9.5160 11 2-5 9.4438 9.4960 9.4009 12 2-6 4.1296 4.1122 4.1305 13 2-7 1.8065 1.8483 1.8664 14 2-8 0.2116 0.2603 0.2133 15 2-9 2.0446 2.0606 2.0415 16 3-4 7.9784 8.0151 7.9581 17 3-5 7.8915 7.9712 7.8602 18 3-6 2.3329 2.3173 2.3126 19 3-7 0.2333 0.2588 0.2135 20 3-8 1.8219 1.8486 1.8638 21 3-9 3.8218 3.8680 3.8688 22 4-5 0.2650 0.1579 0.2690 23 4-6 5.8379 5.8764 5.8258 24 4-7 7.9278 7.9313 7.8948 25 4-8 9.4612 9.4532 9.4284 26 4-9 11.0225 11.0384 10.9877 27 5-6 5.7658 5.8420 5.7427 28 5-7 7.8339 7.8827 7.7904 29 5-8 9.3540 9.3943 9.3083 30 5-9 10.9001 10.9694 10.8521 31 6-7 2.3331 2.2829 2.2866 32 6-8 4.0828 4.0599 4.0817 33 6-9 6.0035 6.0059 6.0050 34 7-8 1.7664 1.8073 1.8310 35 7-9 3.7500 3.8181 3.8256 36 8-9 2.0213 2.0356 2.0206