1
PENENTUAN PENGARUH AYUNAN BEBAN DAN PERHITUNGAN FREKUENSI NATURAL PADA CRANE JENIS “CRAWLER”
( Cindy Ika Yuli Andarini, Ir. Yerri Susatio, MT, Ir. Heri Justiono) Jurusan Teknik Fisika - Fakultas Teknologi Industri
Institut Teknologi Sepuluh Nopember Surabaya, 2011
ABSTRAK
Crawler crane adalah salah satu jenis dari crane, dimana alat ini merupakan pengangkat yang biasa digunakan didalam proyek konstruksi. Cara kerja crane adalah dengan mengangkat material yang akan dipindahkan, memindahkan secara horizontal, kemudian menurunkan material ditempat yang diinginkan. Dalam tugas akhir ini dicari besarnya nilai frekuensi natural dari crawler crane dan menganalisa pengaruh dari ayunan beban yang diangkat terhadap getaran crane secara keseluruhan. Frekuensi natural diperoleh dengan mencari besarnya nilai kekakuan ekivalen (Keq) dari crane terlebih dahulu. Nilai Keq dipengaruhi oleh panjang lattice yang digunakan dan besarnya sudut yang terbentuk antara lattice dengan sumbu vertikal. Lattice yang digunakan dalam penelitian ini bervariasi yaitu 10m, 15m, 20m, dan 25m. Sedangkan sudut yang digunakan untuk penelitian ini antara 15o-90o
Kata kunci : crawler crane, frekuensi natural, dan lattice
, dimana sudut tersebut adalah sudut yang terbentuk antara lattice dengan sumbu vertikal. Setelah nilai Keq ditemukan, langkah selanjutnya adalah memodelkan sistem dengan menggunakan persamaan Lagrange dan mencari responnya dengan bantuan software Mathcad 14. Dari penelitian yang telah dilakukan, diperoleh kesimpulan bahwa semakin besar nilai sudut maka nilai Keq yang dihasilkan semakin besar, dimana semakin besar nilai Keq maka semakin besar pula nilai frekuensi naturalnya. Jadi semakin besar sudut antara lattice dengan sumbu vertikal maka semakin besar pula nilai frekuensi naturalnya. Akan tetapi jika dilihat dari panjang lattice-nya, semakin panjang lattice yang digunakan maka semakin kecil nilai frekuensi naturalnya. Hasil penelitian pada crawler crane dengan penambahan beban pada ayunan sebesar 1kg, 2kg, dan 3kg tidak berpengaruh pada respon dari sistem, hal ini menunjukkan bahwa pengaruh ayunan beban tidak mempengaruhi kinerja dari crawler crane.
PENDAHULUAN
Peralatan pengangkat bahan digunakan unuk memindahkan muatan di lokasi atau area, departemen, pabrik, lokasi konstruksi, tempat penyimpanan, pembongkaran muatan dan sebagainya. Proses pemindahan ini juga mencakup pada proses pemuatan dan pembongkaran. Pemindahan beban tersebut dilakukan dengan menggunakan tenaga yang lebih kecil dari pada beban yang akan dipindahkan.
Untuk kepentingan operasi pemuatan dan pembongkaran, beberapa jenis pesawat pengangkat dilengkapi dengan peralatan pengangkat beban yang dioperasikan dengan menggunakan mesin bantu (Auxiliary Machine) atau dengan cara manual. Salah satu alat bantu yang digunakan adalah.crane, dimana alat ini dapat digunakan untuk mengangkat dan menurunkan material secara vertical dan memindahkannya secara
horizontal. Untuk crane jenis crawler, kondisi alam seperti angin juga mempengaruhi beban pengangkutannya. Selain itu frekuensi naturalnya juga perlu dicari agar frekuensi penggangu luar dapat dihindari. Oleh karena itu, pada tugas akhir ini akan membahas tentang “Penentuan Pengaruh Ayunan Beban dan Perhitungan Frekuensi Natural Pada Crane Jenis Crawler.
Permasalahan
Dari pemaparan latar belakang diatas, maka permasalahan dari tugas akhir ini adalah sebagai berikut:
1. Berapakah frekuensi natural untuk dimensi crane tertentu?
2. Apakah pengaruh dari ayunan beban yang diangkat terhadap getaran crane secara keseluruhan?
2
Batasan Masalah
Batasan masalah pada tugas akhir ini adalah sebagai berikut:
1. Lattice crane dianggap sebagai beam 2. Hoistrope dianggap sebagai bar
Tujuan Tugas Akhir
Tujuan dari tugas akhir ini adalah sebagai berikut :
1. Untuk mengetahui besarnya frekuensi natural pada dimensi crane tertentu 2. Untuk mengetahui pengaruh ayunan
beban yang diangkat terhadap getaran crane secara keseluruhan
Metodologi Penelitian
Dalam penelitian tugas akhir ini, langkah-langkah yang dilakukan untuk mencapai tujuan penelitian tugas akhir adalah sebagai berikut :
1. Studi Literatur
Mencari spesifikasi dari crane jenis “crawler”, yang digunakan untuk mengolah data.
2. Pengolahan data
Menghitung besarnya nilai Keq pada crane jenis “crawler” pada setiap sudut dan panjang lattice tertentu. Setelah nilai Keq diperoleh, maka dilakukan perhitungan frekuensi natural pada tiap sudutnya.
3. Pemodelan sistem
Mencari persamaan sistem menggunakan persamaan lagrange. Setelah itu dapat dicari respon sistem setiap sudutnya menggunakan software Mathcad 14.
4. Analisa data dan Pembahasan
Setelah didapatkan responnya, dapat diketahui bahwa sudut tertentu cocok menggunakan lattice dengan panjang tertentu pula.
5. Kesimpulan dan Saran
Setelah melakukan serangkaian kegiatan di atas maka dapat diambil kesimpulan bahwa hasil dari analisis data apakah telah dapat mencapai tujuan dari penelitian tugas akhir ini.
DASAR TEORI CRANE
Crane adalah alat pengangkat yang pada umumnya dilengkapi dengan drum tali baja, tali baja dan rantai yang dapat digunakan untuk mengangkat dan menurunkan material secara vertikal dan memindahkannya secara horizontal. Crane dilengkapi dengan beragai peralatan untuk memudahkan pekerjaan atau pergerakan dari crane tersebut. Crane biasanya digunakan pada industri transportasi untuk memuat atau membongkar muatan barang, peti kemas dan lain sebagainya. Pada industri konstruksi bangunan digunakan untuk memindahkan material bangunan atau memasang peralatan berat diatas ketinggian tertentu.
Crawler crane
Crawler crane mempunyai bagian atas yang dapat bergerak 3600. dengan roda crawler maka crane tipe ini dapat bergerak didalam lokasi proyek saat melakukan pekerjaannya. Pada saat crane akan digunakan diproyek lain maka crane diangkut dengan menggunakan lowbed trailer. Pengangkutan ini dilakukan dengan membongkar boom menjadi beberapa bagian untuk mempermudah pelaksanaan pengangkutan.
Gambar 2.1 Crawler Crane
Railroad Crane
Railroad crane adalah tipe crane yang dijalankan di atas kereta api. Kegunaan utama railroad crane adalah mengangkat peralatan sepanjang rel kereta api, perawatan pekerjaan perkereta apian dan membersihkan lintasan kecelakaan kereta api. Meskipun di desain untuk keperluan yang berbeda, tetapi railroad crane mempunyai sistem kerja dan peralatan yang sama seperti badan crane yang dapat berputar, perbedaannya adalah railroad crane ditempatkan diatas chasis kereta api dengan roda pejal.
3 Gambar 2.2 Railroad Crane
Tower Crane
Tower crane adalah peralatan modern yang biasa digunakan untuk mengangkat material konstruksi pada pembangunan gedung-gedung tinggi. Tower crane tertanam dalam tanah, terkadang di kombinasikan dengan di tambatkan pada sisi bangunan). Tower crane merupakan peralatan angkat terbaik untuk mengangkat beban yang sangat berat dengan ketinggian maksimum dalam pembangunan gedung tinggi.
Gambar 2.3 Tower Crane
Container Crane
Container Crane atau Portainer adalah crane yang digunakan untuk membongkar atau memuat peti kemas dari dan ke dermaga ke kapal peti kemas atau memindahkan peti kemas dari satu tempat ketempat lain di dalam terminal peti kemas Peti kemas yang diangkat, dipindah adalah peti kemas ISO yang berukuran panjang 20, 40 dan 45 kaki yang dari truk chasis bergerak dibawah crane,kemudian diangkat keatas dan kemudian ke kapal dan sebaliknya. Crane bergerak diatas rel, sehingga posisi crane hanya bisa bergerak menelusuri dermaga.
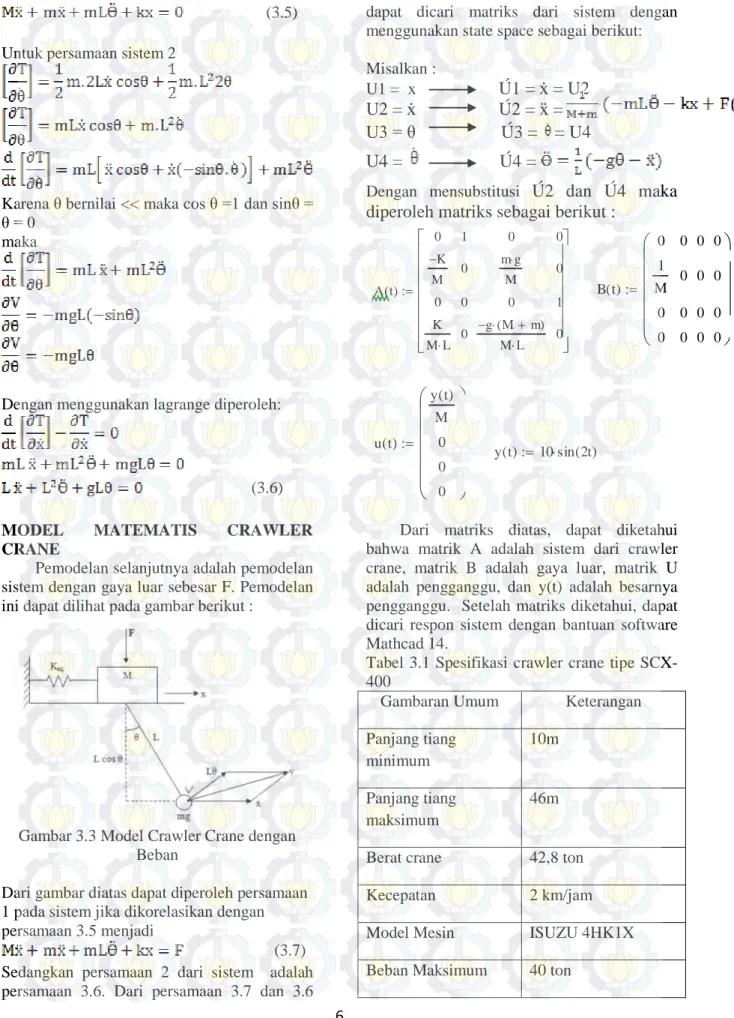
Gambar 2.4 Container Crane
NILAI KEKAKUAN EKIVALEN (Keq) PADA CRANE
Gambar 2.5 Bentuk Fisik Crane Tiang crane AB yang ditunjukkan pada gambar 2.5(a) adalah bar baja seragam dengan panjang l2 dan luas penampang D1. Berat w dihentikan sementara pada derek stasioner. Kabel CEDBF terbuat dari baja dan memiliki luas penampang D2 serta Alas FA sebesar 2n. Mengabaikan pengaruh kabel, menemukan konstanta pegas ekivalen sistem pada arah vertical dengan pendekatan kesetatraan energy potensial.
Karena dasar crane adalah kaku, kabel dan tiang bisa dianggap tetap pada masing-masing titik F dan A. Pengaruh kabel juga diabaikan, maka W berat dapat diasumsikan untuk bertindak melalui titik b seperti ditunjukkan pada gambar. 2.
Perpindahan vertikal x pada titik B akan menyebabkan pegas k
5(b).
2 (tiang) untuk berubah bentuk oleh menjadi x2 = x cos (90
0
-α) dan pegas k1 (kabel) untuk berubah bentuk menjadi x1= x cos (90-θ).
(2.1)
Jika sudut θ, diperoleh hubungan:
4 Total energy potensial (U) disimpan dalam pegas k1 dan k2 dapat dinyatakan dalam persamaan:
(2.3) Dimana
(2.4) Saat pegas setara dalam arah vertikal
mengalami deformasi x, energi potensial pegas ekivalen diberikan oleh
(2.5) Dengan menetapkan U = Ueq, diperoleh
konstanta pegas ekivalen dari sistem sebagai berikut:
(2.6)
FREKUENSI NATURAL
Untuk sistem SDOF, yang dimaksud dengan frekuensi natural adalah frekuensi dimana suatu sistem struktur yang memiliki massa dan kekakuan bergerak ketika diberikan suatu eksitasi awal, kemudian eksitasi tersebut dihilangkan sehingga struktur tersebut bergetar secara bebas. Ketika bentuk dari perpindahan struktur tersebut bergetar disebut dengan moda getar. Frekuensi getar dipengaruhi oleh properti fisik dari struktur, yaitu massa dan kekakuan (2.7) dimana : ωn = frekuensi natural k = kekakuan m = massa
Ketika sistem struktur menjadi lebih kompleks dengan penambahan derajat kebebasan, frekuensi natural dan moda getar tetap dipakai dalam analisa dinamik yang mana jumlah frekuensi natural dan moda getar sejumlah dengan banyaknya derajat kebebasan (DOF) yang ada.
Untuk sistem MDOF, frekuensi natural dan moda getar diketahui dengan penggunaan persamaan karakteristik (eigenvalue equation). Dalam dinamikastruktur, akar dari nilai eigen dikenal dengan frekuensi natural (ωn) dan vektor eigen dikenal dengan moda getar (φn). Dimana tiap moda memiliki satu eigen value dan satu vektor eigen. Dan layaknya SDOF, pada sistem MDOF komposisi massa dan
kekakuan menentukan nilai frekuensi natural dan moda getar suatu sistem struktur
PERSAMAAN LAGRANGE
Untuk menunjukkan spesifikasi yang jelas dari suatu sistem dinamis, sering kali diperlukan lebih dari satu variable untuk menggambarkannya. Sering kali mengalami kesulitan untuk menuliskan persamaan gerak dari suatu sistem partikel atau rigid body yang kompleks dengan menggunakan prinsip Newton II, yaitu dengan membuat free body diagram dari semuanya atau momen yang bekerja pada system tersebut.
Cara lainuntuk menuliskan persamaan gerak suatu sistem dinamis adalah dengan persamaan lagrange. Cara ini lebih mudah dibandingkan dengan prinsip Newton II, terutama untuk system yang mempunyai derajat kebebasan lebih dari satu. Persamaan larange ditentukan atas dasar energy dari sistem, baik energi kinetik, energi potensial maupun energi redaman, disamping gaya luar (gaya non conservative) yang bekerja.
Energi kinetik adalah energi dari suatu benda yang dimiliki karena pengaruh gerakannya. Benda yang bergerak memiliki energi kinetik. Energi kinetik dapat diperoleh dengan persamaan sebagai berikut :
(2.8) Dimana : T = energi kinetik
m = massa
v = kecepatan
Energi potensial adalah energi yang dimiliki suatu benda akibat adanya pengaruh tempat atau kedudukan dari benda tersebut. Energi potensial disebut juga dengan energi diam karena benda yang dalam keaadaan diam dapat memiliki energi. Jika benda tersebut bergerak, maka benda itu mengalami perubahan energi potensial menjadi energi gerak. Energi potensial diperoleh dengan persamaan :
V = mgh = mgx (2.9) Keterangan :
V = energi potensial m = massa dari benda g = percepatan gravitasi h = tinggi benda dari tanah Persamaan lagrange : L = T – V
5
L =
Jika L diturunkan terhadap x, maka akan diperoleh
Jika L diturunkan terhadap (ẋ) maka akan diperoleh
Jadi persamaan lagrangenya adalah
(2.10)
METODOLOGI PENELITIAN
Pada penelitian tugas akhir ini, tahapan-tahapan yang dilakukan dapat dilihat pada flowchart berikut ini :
Gambar 3.1 Flowchart Penelitian
PEMODELAN SISTEM
Pemodelan sistem yang dilakukan adalah memodelkan sistem dari crawler crane dimana pemodelan awal yang dilakukan adalah model sistem tanpa adanya gangguan luar. Model ini
dapat diilustrasikan seperti pada gambar 3.1 berikut ini.
Gambar 3.2 Model crane tanpa beban Keterangan :
M = load / beban mg = tambahan beban
Dari gambar diatas, dapat diperoleh persamaannya sebagai berikut :
(3.1) Energi kinetik (T) :
(3.2) Dengan memasukkan pers.(3.1) ke pers(3.2)
maka diperoleh :
(3.3) Dimana :
m = tambahan beban yang menyebabkan ayunan
Energi potensial (V):
(3.4)
karena :
θ bernilai << maka cos θ =1 dan sinθ = θ = 0 maka
Persamaan sistem 1 menggunakan lagrange adalah sebagai berikut:
6
(3.5) Untuk persamaan sistem 2
Karena θ bernilai << maka cos θ =1 dan sinθ = θ = 0
maka
Dengan menggunakan lagrange diperoleh:
(3.6)
MODEL MATEMATIS CRAWLER CRANE
Pemodelan selanjutnya adalah pemodelan sistem dengan gaya luar sebesar F. Pemodelan ini dapat dilihat pada gambar berikut :
Gambar 3.3 Model Crawler Crane dengan Beban
Dari gambar diatas dapat diperoleh persamaan 1 pada sistem jika dikorelasikan dengan persamaan 3.5 menjadi
(3.7) Sedangkan persamaan 2 dari sistem adalah
persamaan 3.6. Dari persamaan 3.7 dan 3.6
dapat dicari matriks dari sistem dengan menggunakan state space sebagai berikut: Misalkan :
U1 = x
Ú1 =
ẋ = U2
U2 =
ẋ
Ú2 =
ẍ =
U3 = θ Ú3 = = U4
U4 = Ú4 =
Dengan mensubstitusi
Ú2 dan Ú4 maka
diperoleh matriks sebagai berikut :
y t( ) := 10 sin 2t⋅ ( )
Dari matriks diatas, dapat diketahui bahwa matrik A adalah sistem dari crawler crane, matrik B adalah gaya luar, matrik U adalah pengganggu, dan y(t) adalah besarnya pengganggu. Setelah matriks diketahui, dapat dicari respon sistem dengan bantuan software Mathcad 14.
Tabel 3.1 Spesifikasi crawler crane tipe SCX-400
Gambaran Umum Keterangan Panjang tiang minimum 10m Panjang tiang maksimum 46m
Berat crane 42,8 ton
Kecepatan 2 km/jam
Model Mesin ISUZU 4HK1X Beban Maksimum 40 ton
A t( ) 0 K − M 0 K M L⋅ 1 0 0 0 0 m g⋅ M 0 g − M⋅( +m) M L⋅ 0 0 1 0 := u t( ) y t( ) M 0 0 0
:= B t( ) 0 1 M 0 0 0 0 0 0 0 0 0 0 0 0 0 0
:=7
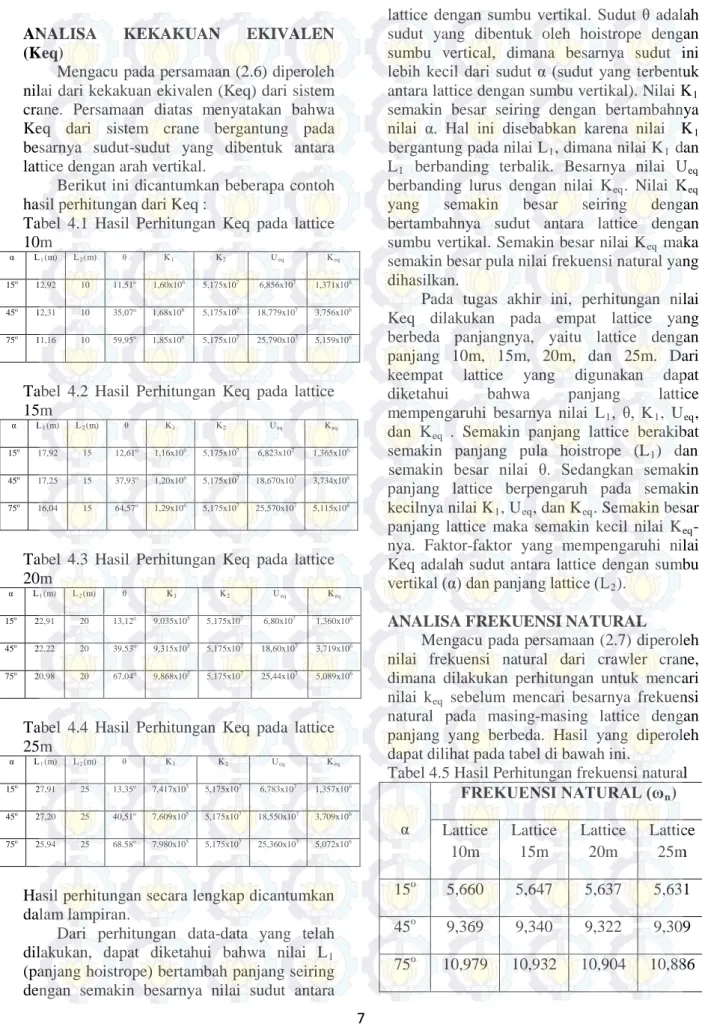
ANALISA KEKAKUAN EKIVALEN (Keq)
Mengacu pada persamaan (2.6) diperoleh nilai dari kekakuan ekivalen (Keq) dari sistem crane. Persamaan diatas menyatakan bahwa Keq dari sistem crane bergantung pada besarnya sudut-sudut yang dibentuk antara lattice dengan arah vertikal.
Berikut ini dicantumkan beberapa contoh hasil perhitungan dari Keq :
Tabel 4.1 Hasil Perhitungan Keq pada lattice 10m α L1(m) L2(m) θ K1 K2 Ueq Keq 15o 12,92 10 11,51o 1,60x106 5,175x107 6,856x107 1,371x106 45o 12,31 10 35,07o 1,68x10 5,175x10 6 18,779x10 7 3,756x10 7 6 75o 11,16 10 59,95o 1,85x10 5,175x10 6 25,790x10 7 5,159x10 7 6
Tabel 4.2 Hasil Perhitungan Keq pada lattice 15m α L1(m) L2(m) θ K1 K2 Ueq Keq 15o 17,92 15 12,61o 1,16x10 5,175x10 6 6,823x10 7 1,365x10 7 6 45o 17,25 15 37,93o 1,20x106 5,175x107 18,670x107 3,734x106 75o 16,04 15 64,57o 1,29x10 5,175x10 6 25,570x10 7 5,115x10 7 6
Tabel 4.3 Hasil Perhitungan Keq pada lattice 20m α L1(m) L2(m) θ K1 K2 Ueq Keq 15o 22,91 20 13,12o 9,035x10 5,175x10 5 6,80x10 7 1,360x10 7 6 45o 22,22 20 39,53o 9,315x10 5,175x10 5 18,60x10 7 3,719x10 7 6 75o 20,98 20 67,04o 9,868x105 5,175x107 25,44x107 5,089x106
Tabel 4.4 Hasil Perhitungan Keq pada lattice 25m α L1(m) L2(m) θ K1 K2 Ueq Keq 15o 27,91 25 13,35o 7,417x105 5,175x107 6,783x107 1,357x106 45o 27,20 25 40,51o 7,609x10 5,175x10 5 18,550x10 7 3,709x10 7 6 75o 25,94 25 68.58o 7.980x10 5,175x10 5 25,360x10 7 5,072x10 7 6
Hasil perhitungan secara lengkap dicantumkan dalam lampiran.
Dari perhitungan data-data yang telah dilakukan, dapat diketahui bahwa nilai L1 (panjang hoistrope) bertambah panjang seiring dengan semakin besarnya nilai sudut antara
lattice dengan sumbu vertikal. Sudut θ adalah sudut yang dibentuk oleh hoistrope dengan sumbu vertical, dimana besarnya sudut ini lebih kecil dari sudut α (sudut yang terbentuk antara lattice dengan sumbu vertikal). Nilai K1 semakin besar seiring dengan bertambahnya nilai α. Hal ini disebabkan karena nilai K1 bergantung pada nilai L1, dimana nilai K1 dan L1 berbanding terbalik. Besarnya nilai Ueq berbanding lurus dengan nilai Keq. Nilai Keq yang semakin besar seiring dengan bertambahnya sudut antara lattice dengan sumbu vertikal. Semakin besar nilai Keq
Pada tugas akhir ini, perhitungan nilai Keq dilakukan pada empat lattice yang berbeda panjangnya, yaitu lattice dengan panjang 10m, 15m, 20m, dan 25m. Dari keempat lattice yang digunakan dapat diketahui bahwa panjang lattice mempengaruhi besarnya nilai L
maka semakin besar pula nilai frekuensi natural yang dihasilkan.
1, θ, K1, Ueq, dan Keq . Semakin panjang lattice berakibat semakin panjang pula hoistrope (L1) dan semakin besar nilai θ. Sedangkan semakin panjang lattice berpengaruh pada semakin kecilnya nilai K1, Ueq, dan Keq. Semakin besar panjang lattice maka semakin kecil nilai Keq -nya. Faktor-faktor yang mempengaruhi nilai Keq adalah sudut antara lattice dengan sumbu vertikal (α) dan panjang lattice (L2).
ANALISA FREKUENSI NATURAL
Mengacu pada persamaan (2.7) diperoleh nilai frekuensi natural dari crawler crane, dimana dilakukan perhitungan untuk mencari nilai keq
Tabel 4.5 Hasil Perhitungan frekuensi natural sebelum mencari besarnya frekuensi natural pada masing-masing lattice dengan panjang yang berbeda. Hasil yang diperoleh dapat dilihat pada tabel di bawah ini.
α FREKUENSI NATURAL (ωn) Lattice 10m Lattice 15m Lattice 20m Lattice 25m 15o 5,660 5,647 5,637 5,631 45o 9,369 9,340 9,322 9,309 75o 10,979 10,932 10,904 10,886
8 Hasil perhitungan secara lengkap dicantumkan dalam lampiran.
Apabila panjang lattice diubah-ubah, dapat diketahui bahwa bertambah panjangnya lattice berpengaruh pada nilai Keq yang dihasilkan. Semakin panjang lattice maka semakin kecil nilai Keq yang diperoleh, dimana semakin kecil nilai Keq mempengaruhi nilai frekuensi naturalnya. Jadi semakin panjang lattice pada crawler crane menyebabkan nilai frekuensi natural semakin kecil. Jadi semakin besar nilai sudut antara lattice dengan sumbu vertikal maka semakin besar pula nilai frekuensi naturalnya dan semakin panjang lattice mengakibatkan semakin kecil nilai frekuensi natural.
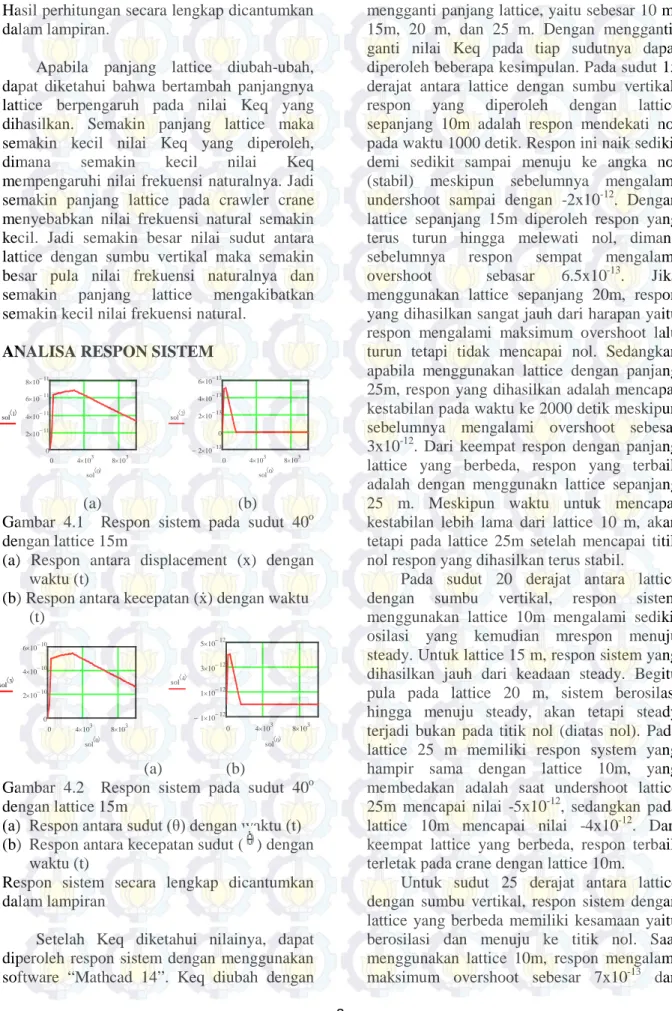
ANALISA RESPON SISTEM
(a) (b)
Gambar 4.1 Respon sistem pada sudut 40o (a) Respon antara displacement (x) dengan
waktu (t) dengan lattice 15m
(b) Respon antara kecepatan (ẋ) dengan waktu (t)
(a) (b)
Gambar 4.2 Respon sistem pada sudut 40o (a) Respon antara sudut (θ) dengan waktu (t) dengan lattice 15m
(b) Respon antara kecepatan sudut ( ) dengan waktu (t)
Respon sistem secara lengkap dicantumkan dalam lampiran
Setelah Keq diketahui nilainya, dapat diperoleh respon sistem dengan menggunakan software “Mathcad 14”. Keq diubah dengan
mengganti panjang lattice, yaitu sebesar 10 m, 15m, 20 m, dan 25 m. Dengan mengganti-ganti nilai Keq pada tiap sudutnya dapat diperoleh beberapa kesimpulan. Pada sudut 15 derajat antara lattice dengan sumbu vertikal, respon yang diperoleh dengan lattice sepanjang 10m adalah respon mendekati nol pada waktu 1000 detik. Respon ini naik sedikit demi sedikit sampai menuju ke angka nol (stabil) meskipun sebelumnya mengalami undershoot sampai dengan -2x10-12. Dengan lattice sepanjang 15m diperoleh respon yang terus turun hingga melewati nol, dimana sebelumnya respon sempat mengalami overshoot sebasar 6.5x10-13. Jika menggunakan lattice sepanjang 20m, respon yang dihasilkan sangat jauh dari harapan yaitu respon mengalami maksimum overshoot lalu turun tetapi tidak mencapai nol. Sedangkan apabila menggunakan lattice dengan panjang 25m, respon yang dihasilkan adalah mencapai kestabilan pada waktu ke 2000 detik meskipun sebelumnya mengalami overshoot sebesar 3x10-12
Pada sudut 20 derajat antara lattice dengan sumbu vertikal, respon sistem menggunakan lattice 10m mengalami sedikit osilasi yang kemudian mrespon menuju steady. Untuk lattice 15 m, respon sistem yang dihasilkan jauh dari keadaan steady. Begitu pula pada lattice 20 m, sistem berosilasi hingga menuju steady, akan tetapi steady terjadi bukan pada titik nol (diatas nol). Pada lattice 25 m memiliki respon system yang hampir sama dengan lattice 10m, yang membedakan adalah saat undershoot lattice 25m mencapai nilai -5x10
. Dari keempat respon dengan panjang lattice yang berbeda, respon yang terbaik adalah dengan menggunakn lattice sepanjang 25 m. Meskipun waktu untuk mencapai kestabilan lebih lama dari lattice 10 m, akan tetapi pada lattice 25m setelah mencapai titik nol respon yang dihasilkan terus stabil.
-12
, sedangkan pada lattice 10m mencapai nilai -4x10-12
Untuk sudut 25 derajat antara lattice dengan sumbu vertikal, respon sistem dengan lattice yang berbeda memiliki kesamaan yaitu berosilasi dan menuju ke titik nol. Saat menggunakan lattice 10m, respon mengalami maksimum overshoot sebesar 7x10
. Dari keempat lattice yang berbeda, respon terbaik terletak pada crane dengan lattice 10m.
-13 0 4 10× 3 8 10× 3 0 2 10× −11 4 10× −11 6 10× −11 8 10× −11 sol〈 〉1 sol〈 〉0 dan 0 4 10× 3 8 10× 3 2 − ×10−13 0 2 10× −13 4 10× −13 6 10× −13 sol〈 〉2 sol〈 〉0 0 4 10× 3 8 10× 3 0 2 10× −10 4 10× −10 6 10× −10 sol〈 〉3 sol〈 〉0 0 4 10× 3 8 10× 3 1 − ×10−12 1 10× −12 3 10× −12 5 10× −12 sol〈 〉4 sol〈 〉0
9 undershoot sebesar-1x10-13. Pada lattice 15m maximum overshoot yang terjadi kurang dari 4x10-13 dan undershoot kurang dari -4x10-12. Dengan menggunakan lattice 20m, respon yang dihasilkan maximum overshoot yang terjadi sebesar 5x10-13 dan undershoot sebesar -1x10-12. Respon crane dengan lattice 25m mengalami maximum overshoot kurang dari 1,5x10-13 dan undershoot kurang dari -1x10-13
Crane dengan sudut 30 derajat antara lattice dengan sumbu vertical dengan lattice sepanjang 10m memiliki respon mendekati steady setelah berosolasi dengan maximum overshoot sebesar 7x10
. Dari keempat respon yang dihasilkan, respon terbaik terdapat pada lattice 25m karena memiliki overshoot dan undershoot terkecil.
-14
dan undershoot sebesar -8x10-14. Sedangkan pada lattice dengan panjang 15m dan 20 m sama-sama berosilasi, tetapi tidak mencapai steady (titik nol). Untuk lattice 25m, sistem juga mengalami osilasi sebelum mencapai steady mengalami undershoot sebesar -2,2x10-12
Pada sudut 35 derajat antara lattice dengan sumbu vertikal, respon system yang dihasilkan oleh keempat lattice yang berbeda menunjukkan respon yang menuju steady dengan osilasi sebelumnya. Yang berbeda hanya pada lattice 25m, respon yang dihasilkan belum mencapai steady. Dengan menggunakan lattice 10m, maximum overshoot sebesar 7,5x10
. Dari keempat respon, respon terbaik jika dilihat dari osilasi dan waktu steady terdapat pada lattice sepanjang 25m.
-13
dan undershoot sebesar -5x10-13. Lattice 15m maximum overshoot sebesar 2,8x10-13 dan undershoot sebesar -0,3x10-13. Lattice 20m maximum overshoot sebesar 6x10-13
-3x10
dan undershoot sebesar
-13
Pada sudut 40 derajat, lattice dengan panjang 10m mengalami undershoot sebesar -1,2x10
. Dari keempat lattice yang berbeda, respon sistem terbaik berada pada lattice dengan panjang 15m.
-12
dan maximum overshoot sebesar 2x10-13. Lattice sepanjang 15m mengalami maximum overshoot sebesar 5x10-13 dan tidak mengalami undershoot. Lattice dengan panjang 20m mengalami undershoot sebesar -2x10-13 dan maximum overshoot sebesar 8x10
-13
,akan tetapi respon tidak langsung menuju steady. Lattice dengan panjang 25 m mengalami undershoot sebesar -6x10-13 dan maximum overshoot sebesar 5x10-13
Sudut 45 derajat antara lattice dengan sumbu vertical menghasilkan overshoot sebesar 1,5x10
. Dari keempat respon, respon terbaik berada pada lattice sepanjang 15m karena responnya hanya mengalami overshoot dan menuju steady.
-12
dan undershoot sebesar -2x10-13 pada lattice 10m. Untuk lattice 15m, respon system mengalami overshoot sebesar 1,8x10-12. Lattice 20m mengalami osilasi dengan maksimum overshoot sebesar 1,5x10-12 dan undershoot sebesar -3x10-13. Lattice 25m mengalami overshoot sebesar 1,2x10-12 dan undershoot sebesar -3x10-13
Pada sudut 50 derajat antara lattice dengan sumbu vertical, respon system yang diperoleh pada lattice sepanjang 10m adalah respon mengalami osilasi dengan overshoot sebesar 2x10
. Dari keempat respon dari masing-masing lattice, respon terbaik berada pada crane dengan menggunakan lattice sepanjang 15m.
-12
dan undershoot sebesar -0,25x10-12. Sedangkan pada lattice 15m memiliki overshoot sebesar 1,7x10-12
-2,5x10
dan undershoot sebesar
-13
. Lattice 20m memiliki overshoot sebesar 8x10-13 dan undershoot sebesar -2x10 -13
. Lattice 25m mengalami osilasi dengan maksimum overshoot sebesar 4x10-13 dan undershoot sebesar -0,2x10-13
Untuk sudut 55 derajat antara lattice pada crane dengan sumbu vertikal, didapatkan respon sistem pada lattice 10m mengalami overshoot sebesar 4,5x10
akan tetapi respon steady belum mencapai nilai nol. Dari keempat respon pada masing-masing lattice, respon terbaik berada pada lattice dengan panjang 20m.
-13
. Pada lattice 15m mengalami undershoot sebesar -1x10-12 dan overshoot sebesar 2,5x10-13. Lattice 20m mengalami osilasi dengan maksimum undershoot sebesar -6x10-13. Lattice 25m mengalami overshoot sebesar 1x10-13 dan undershoot sebesar -4x10-13
Pada sudut 60 derajat antara lattice dengan sumbu vertikal, diperoleh respon tetapi system belum menuju steady. Dari keempat respon yang ditunjukkan, respon terbaik berada pada lattice dengan panjang 10m.
10 mengalami undershoot kurang dari -2x10-13 dengan menggunakan lattice 10m. Dengan lattice sepanjang 15m, diperoleh respon sistem mengalami osilasi dengan maksimum overshoot sebesar 6x10-13 dan undershoot sebesar -5x10-13. Lattice dengan panjang 20m memiliki respon dengan maksimum overshoot kurang dari 5x10-13
–3x10
dan undershoot kurang dari
-13
. Lattice dengan panjang 25m mengalami undershoot sebesar -3x10-13 dan maksimum overshoot kurang dari 1x10-13
Respon sistem yang diperoleh pada sudut 65 derajat antara lattice dengan sumbu vertikal dengan menggunakan lattice sepanjang 10m adalah system mengalami osilasi dengan maksimum overshoot kurang dari 5x10
. Dari keempat respon yang diperoleh, respon terbaik adalah crane dengan menggunakan lattice sepanjang 20m.
-13 dan maksimum undershoot kurang dari -1x10-13, dimana respon akhir yang dihasilkan belum mencapai steady. Lattice 15m memiliki respon maksimum undershoot sebesar -2x10-13 dan overshoot sebesar 4x10-13, setelah itu respon yang dihasilkan steady. Lattice 20m memiliki respon undershoot sebesar -3,5x10-13 dan overshoot sebesar 0,5x10-13. Lattice dengan panjang 25m respon undershoot sebesar -2,5x10-13 dan overshoot sebesar 0,5x10-13
Pada sudut 70 derajat antara lattice dengan sumbu vertikal dihasilkan respon sistem dengan lattice sepanjang 10m adalah respon mengalami osilasi dan menuju ke keadaan stabil dengan overshoot sebesar 4x10
. Dari keempat respon yang dihasilkan dapat disimpulkan respon terbaik adalah respon sistem dengan mengginakan lattice sepanjang 15m.
-13
dan undershoot kurang dari -3,5x10-13. Lattice sepanjang 15m memiliki respon dengan overshoot kurang dari 5x10-13 sebelum steady. Lattice dengan panjang 20m mengalami undershoot sebesar -5x10-13 dan overshoot kurang dari 1x10-13. Lattice dengan panjang 25 m memiliki respon undershoot sebesar -3,5x10-13 dan overshoot sebesar 0,5x10-13
Dengan menggunakan sudut 75 derajat antara lattice dengan sumbu vertikal, diperoleh respon sistem yang berosilasi dengan
maksimum overshoot sebesar 3,5x10
. Respon terbaik adalah respon sistem crane dengan lattice sepanjang 15m.
-13 dan respon undershoot sebesar 0,5x10-13 pada lattice 10m. Lattice sepanjang 15m memiliki respon dengan maksimum overshoot sebesar 3,5x10-13 dan respon undershoot sebesar 0,5x10-13. Lattice dengan panjang 20m memiliki respon undershoot sebesar -6x10-14 dan turun lagi menjadi -6,5x10-14 lalu mengalami overshoot sebesar 6x10-14. Pada lattice 25m mengalami respon dengan overshoot sebesar 7x10-13 setelah itu respon steady. Dari keempat respon yang diperoleh, respin terbaik adalah lattice dengan panjang 25m.
KESIMPULAN
Berdasarkan hasil pemodelan sistem
dan analisia yang telah dilakukan, maka
diperoleh kesimpulan sebagai berikut
:1. Besarnya nilai Keq dipengaruhi
oleh sudut antara lattice dengan
sumbu vertikal dan panjang lattice.
2. Semakin besar nilai Keq, semakin
besar pula nilai frekuensi
naturalnya.
3. Semakin besar nilai sudut antara
lattice dengan sumbu vertikal,
semakin besar pula nilai frekuensi
naturalnya.
4. Semakin panjang lattice yang
dipakai pada crawler crane maka
semakin kecil nilai frekuensi
naturalnya
5. Lattice dengan panjang 10m cocok digunakan pada sudut 20o dan 55o. Lattice dengan panjang 15m cocok digunakan pada sudut 35o, 40o, 45o, 65o, dan 70o. Lattice dengan panjang 20m cocok digunakan pada sudut 50o dan 60o. Lattice dengan panjang 25m cocok digunakan pada sudut 15o, 30o, dan 75o
6. Penambahan beban pada ayunan sebesar 1kg, 2kg, dan 3kg tidak mempengaruhi respon dari sistem, hal ini berarti bahwa pengaruh ayunan beban tidak mempengaruhi sistem.
11
DAFTAR PUSTAKA
[1] http://www.google.co.id. 2010. “Persamaan Lagrange”
[2] Irawan, Indra. 2010. “Pesawat Kerja”. http://iwany.staff.uns.ac.id/files/2009/09/ bab-i -ayunan-edited.pdf
[3] Rao, Singiretsu S. 1995.”Mechanical
Vibration 3rd
[4] Sumitomo, Hitachi. “SCX400 Hidraulic
Crawler Crane Spesification”. Japan :
Hitachi Sumitomo Heavy Industries Construction Cranes Co.Ltd
Edition”. USA :