BAB I
PENDAHULUAN
1.1 Latar Belakang
Didalam implementasinya sistem kontrol proses memiliki banyak sekali permasalahan, seperti terdapatnya sifat interaksi pada suatu proses multivariable atau multiple-input multiple-output (MIMO), terjadinya kondisi long dead time, terdapatnya batasan dari suatu aktuator pada plant proses, hingga permasalahan mengenai optimasi dari suatu aksi kontrol terhadap proses yang terjadi. Pada banyak kasus, aksi kontrol konvensional sudah dapat menyelesaikan permasalahan-permasalahan yang ada pada suatu plant proses, seperti feedforward
control diaplikasikan untuk menangani permasalahan gangguan pengukuran, override control diaplikasikan untuk menangani constraints dari suatu unit plant
proses dan decoupling control digunakan untuk permasalahan sifat interaksi proses. Namun hal ini masih dinilai kurang, hal ini dikarenakan kemampuan masing-masing aksi kontrol konvensional tersebut hanya dapat menyelesasikan satu permasalahan dari setiap aksi kontrolnya. Bagaimanapun jika semua permasalahan kontrol tersebut terjadi secara bersamaan, maka sangat diperlukan pendekatan yang sistematis terhadap plant proses yang akan dikontrol.
Salah satu unit plant yang sering ditemui pada banyak industri energi maupun industri kimia adalah mesin penghasil uap air, Gambar 1.1 menunjukan bentuk mesin penghasil uap air secara umum. Mesin penghasil uap air merupakan sebuah boiler yang digunakan untuk mengubah air menjadi uap air dengan kualitas bervariasi pada suatu tekanan discharge tertentu. Pada dasarnya mesin penghasil uap air menggunakan parameter masukan fisis berupa air, udara dan bahan bakar, sedangkan parameter keluaran fisis yang dihasilkan berupa uap air.
Gambar 1.1 Mesin penghasil uap air
(http://www.directindustry.com/prod/pirobloc/steam-generators.html, 2014) Parameter masukan dari mesin penghasil uap air perlu untuk dikendalikan agar diperoleh parameter keluaran yang sesuai dengan keadaan yang diperlukan ketika dipergunakan, sehingga mesin penghasil uap air dapat bekerja dengan optimal. Parameter keluaran dari mesin penghasil uap air berupa dependent variabel, maksudnya adalah besaran nilai yang dihasilkan merupakan hasil pengaruh dari interaksi setiap parameter masukan mesin penghasil uap air, maka diperlukan suatu cara untuk mendapatkan prilaku sistem dari mesin penghasil uap air.
Buragohain dan Mahanta (2006) mengatakan bahwa pemodelan mampu mengetahui prilaku sistem dari suatu plant, oleh karena itu dapat membantu dalam membuat desain kontrol baru. Model dari suatu sistem dapat membantu dalam mengidentifikasi parameter sistem, deteksi kesalahan dan optimasi. Salah satu jenis kontroler yang menggunakan model dari plant sebagai unit penyusun kontrolnya adalah kontrol model prediksi. Pada plant yang besar dan kompleks, kontrol model prediksi tidak menjadi kontrol pengganti dari kontrol PID, namun sebagai kontrol tambahan (Halvorsen, 2011).
Dalam memperoleh model dari suatu plant, metode yang sering digunakan adalah metode pemodelan secara matematika, memperoleh sebuah model matematika untuk sebuah sistem sangatlah komplek dan memakan banyak waktu,
3
karena pada penggunaannya sering membutuhkan linearization dan mengabaikan bebearapa parameter sistem (Sivakumar dan Balu, 2010).
1.2 Rumusan Masalah
Rumusan masalah yang menjadi dasar dalam penelitian ini adalah bagaimana mengimplementasikan kontrol model prediksi berbasis ANFIS (Adaptive Neuro Fuzzy Inference System) pada mesin penghasil uap air?
1.3 Tujuan Penelitian
Tujuan yang ingin dicapai dalam penelitian ini adalah mengimplementasikan kontrol model prediksi berbasis ANFIS (Adaptive Neuro Fuzzy Inference System) pada mesin penghasil uap air.
1.4 Batasan Masalah
Dalam pembuatan dan uji coba sistem ini, diberikan beberapa batasan masalah sebagai berikut:
1. Mesin penghasil uap air pada penelitian ini berupa mesin virtual penghasil uap air.
2. Mesin virtual penghasil uap air yang digunakan pada penelitian ini merupakan luaran yang telah dicapai pada penelitian sebelumnya.
3. Karakteristik mesin penghasil uap air yang digunakan dalam membuat mesin virtual penghasil uap air berdasarkan steam generator 10, steam
stxation 1, PT. Chevron Pacific Indonesia, Duri.
4. Mesin virtual penghasil uap air bukan merupakan fokus permasalahan pada penelitian ini, namun hanya sebagai objek untuk mengimplementasikan kontrol model prediksi yang telah dibuat.
5. Parameter masukan mesin penghasil uap air yang terlibat adalah aliran air, tekanan air, aliran udara, tekanan bahan bakar dan temperatur bahan bakar,
sedangkan untuk parameter keluaran yang terlibat adalah tekanan uap air, kualitas uap air, aliran uap air dan O2 content.
6. Historical data yang didapat sebagai training data, merupakan bentuk representasi dari hasil BRC.
7. Basic Regulatory Control (BRC) pada penelitian ini, telah
diimplementasikan pada mesin penghasil uap air sebenarnya, sehingga bukan merupakan bahasan pada penelitian ini.
8. Implementasi kontrol model prediksi pada mesin penghasil uap air pada penelitian ini direpresentasikan dengan menggunakan simulasi.
1.5 Manfaat Penelitian
Manfaat yang bisa diperoleh dari penelitian ini, yaitu:
1. Dapat menjadi kontrol tambahan yang mengatasi permasalahan kontrol proses dalam menangani pengaturan nilai dependent variabel pada plant suatu industri yang berjenis MIMO atau multivariable, sehingga penggunaan
plant dapat lebih optimal.
2. Memberi suatu alternatif lain dalam mendapatkan hasil pemodelan dari
plant, hasil pemodelan yang diperoleh akan dijadikan sebagai unit penyusun
kontrol model prediksi
1.6 Metode Penelitian
Metodologi penelitian yang digunakan dalam penyelesaian skripsi ini adalah sebagai berikut:
1. Melakukan studi pendahuluan dengan cara mencari referensi umum mengenai permasalahan pada sistem kontrol proses, setelah itu melakukan diskusi singkat dengan dosen pembimbing dan ahli/pakar pada bidang
intelligence control system.
2. Studi pustaka dengan mencari referensi lanjutan yang sesuai dengan perancangan, untuk menentukan rancangan yang akan dibuat untuk solusi
5
dari permasalahan, dengan mempelajari referansi tentang sistem kontrol, kecerdasan buatan dan pemodelan sistem.
3. Membuat tampilan antarmuka, yang terdiri dari antarmuka pengambilan
historical data, antarmuka tombol eksekusi pembelajaran ANFIS (Adaptive Neuro Fuzzy Inference System), antarmuka komunikasi serial, antarmuka
panel validasi data dan antarmuka analisa performance dari mesin virtual penghasil uap air yang direpresentasikan dengan grafik surf dan plot.
4. Mengimplementasikan algoritma ANFIS (Adaptive Neuro Fuzzy Inference
System) pada tampilan antarmuka yang telah dibuat dan melakukan uji
validasi data hasil pemodelan dengan data sebenarnya.
5. Menginterkoneksikan antara mesin virtual penghasil uap air dan hasil pemodelan mesin virtual penghasil uap air yang dibuat pada software MATLAB 2011b dengan software LabVIEW 2011.
6. Membuat tampilan antarmuka pada software LabVIEW 2011 sebagai virtual
control room, sehingga penggabungan antara tampilan antarmuka yang
dibuat dengan software MATLAB 2011b menjadi sebuah sistem simulasi mesin penghasil uap air.
7. Dokumentasi berupa penulisan laporan tugas akhir dilakukan sejak awal penelitian. Hasil laporan tiap bab penyusun merupakan keluaran tertulis dari tiap tahap penelitian. Tahap ini ditutup dengan presentasi sidang tugas akhir.
1.7 Sistematika Penulisan
Sistematika penulisan yang digunakan dalam penyususnan tugas akhir ini adalah sebagai berikut:
BAB I: PENDAHULUAN
Berisi pemaparan tentang latar belakang penelitian, rumusan masalah, batasan masalah, tujuan penelitian, manfaat penelitian, metodologi penelitian serta sistematika penulisan.
BAB II: TINJAUAN PUSTAKA
Tinjauan pustaka memuat uraian sistematis tentang informasi hasil penelitian yang disajikan dalam pustaka dan menghubungkannya dengan masalah penelitian yang sedang diteliti.
BAB III: DASAR TEORI
Pada bagian ini berisi penjelasan secara teori mengenai metode dan algoritma yang digunakan pada sistem.
BAB IV: PERANCANGAN SISTEM
Bab ini berisi penjelasan tentang perancangan sistem simulasi yang dibuat, meliputi deskripsi sistem secara keseluruhan, perancangan perangkat keras dan perancangan perangkat lunak.
BAB V: IMPLEMENTASI SISTEM
Bab ini berisi tentang penjelasan mengenai implementasi kontrol model prediksi berbasis ANFIS (Adaptive Neuro Fuzzy Inference System) yang telah dirancang pada bab sebelumnya.
BAB VI: HASIL PENELITIAN DAN PEMBAHASAN
Bab ini berisi mengenai hasil pengujian sistem simulasi kontrol model prediksi berbasis ANFIS (Adaptive Neuro Fuzzy Inference System) yang dibuat oleh peneliti.
BAB VII: PENUTUP
Bab ini berisi kesimpulan dari peneliti dan saran-saran pengembangan penelitian selanjutnya.
BAB II
TINJAUAN PUSTAKA
Bahar dkk. (2006) mengatakan ANN dan ANFIS estimator telah berhasil dalam memperkirakan komposisi top product dan bottom product dalam kolom destilasi multi-komponen. Dalam kasus perubahan tingkat reflux, ANFIS lebih baik dari ANN untuk estimasi koposisi product. ANFIS estimator memiliki beberapa keunggulan dibandingan ANN estimator. Dalam ANFIS tidak perlu untuk normalisasi pada pelatihan dan nilai-nilai sebelumnya untuk variabel state (komposisi) tidak digunakan. Dalam pengolahan data estimator, poin yang terpenting adalah kumpulan data yang dapat diandalkan/dipercaya dalam rentang operasi.
Buragohain dan Mahanta (2006) mengatakan ukuran dari kumpulan data masukan-keluaran sangat penting ketika ketersediaan data sangat sedikit dan untuk menghasilkan kumpulan data yang banyak diperlukan biaya sangat mahal. Dalam keadaan seperti itu, optimasi dalam jumlah data yang digunakan untuk pembelajaran adalah perhatian utama. Penerapan teknik V-Fold pada pemodelan sistem menggunakan ANFIS dapat digunakan untuk pelatihan data dengan jumlah pasangan data yang minimal. Sehingga jumlah data yang diperlukan untuk melakukan pembelajaran dengan menggunakan ANFIS dapat dikurangi secara signifikan menjadi seperdelapan dari kebutuhan untuk ANFIS konvensional.
Adnan dkk. (2010) mengatakan bahwa estimasi dan validasi model dilakukan dengan menggunakan data eksperimen yang dikumpulkan dari pilot
plant. Model yang dikembangkan telah divalidasi menggunakan kesesuaian
dengan kriteria terbaik terhadap data terukur dari pilot plant. Sehingga didapatkan hasil bahwa MISO (Multi Input Single Output) ANFIS yang dikembangkan mampu memodelkan nonlienaer plant melalui pasangan masukan-keluaran yang diperoleh dari percoban plant. Gambar 2.1 menunjukan struktur MISO.
Gambar 2.1 Struktur MISO (Multi Input Single Output) (Adnan dkk, 2010)
Zhang dkk. (2010) mengatakan manfaat mengkombinasikan ANFIS dengan metode multiple model adaptive control adalah untuk memastikan stabilitas sistem dengan loop tertutup dan sekaligus meningkatkan kinerja dari sistem loop tertutup. Selain itu, metode yang diusulkan dapat mengurangi asumsi global
boundedness dari istilah nonlinear orde yang paling tinggi dengan demikian
meningkatkan kepraktisan dari metode. Selanjutnya ANFIS mengatasi ketidakpastian jaringan saraf dan menghemat waktu pelatihan dan dengan demikian menghindari kemungkinan bahwa jaringan menjadi terjebak pada minimum lokal.
Ekaputri dan Rohman (2012) mengatakan penggunaan kontrol model prediksi algoritma-3 dapat diaplikasikan pada sistem inverted pendulum model 505 dan diimplementasikan pada mikrokontroler AVR Atmega 32. Algoritma-3 menghitung masukan sistem kontrol optimal berdasarkan prediksi dari system
behavior. Algoritma-3 juga menyelesaikan masalah constraint pada aktuator.
Sistem dilakukan dengan memberikan ganguan batang pendulum pada titik stabil, maka batang pendulum akan kembali ke titik stabil, Untuk sistem ini nilai horizon ditetapkan pada 9 berdasarkan waktu respon dalam simulasi. Algoritma kontrol model prediksi dapat diimplemetasikan pada prosesor yang lebih komplek untuk komputasi yang komplek.
Kurniawan (2012) mengatakan komponen penting yang dibutuhkan untuk melakukan analisa kinerja mesin penghasil uap air adalah melakukan pemodelan dari mesin penghasil uap air dan membuat graphical user interface sebagai
9
komponen penunjang dalam melakukan analisa. Pemodelan dilakukan dengan mengunakan ANFIS. Didalam analisa kinerja mesin penghasil uap air, parameter yang memiliki peranan penting adalah uap air. ANFIS memiliki kinerja lebih baik, jika membership function dari masukan semakin banyak, namun memiliki kelemahan dari segi komputasi yang sangat berat.
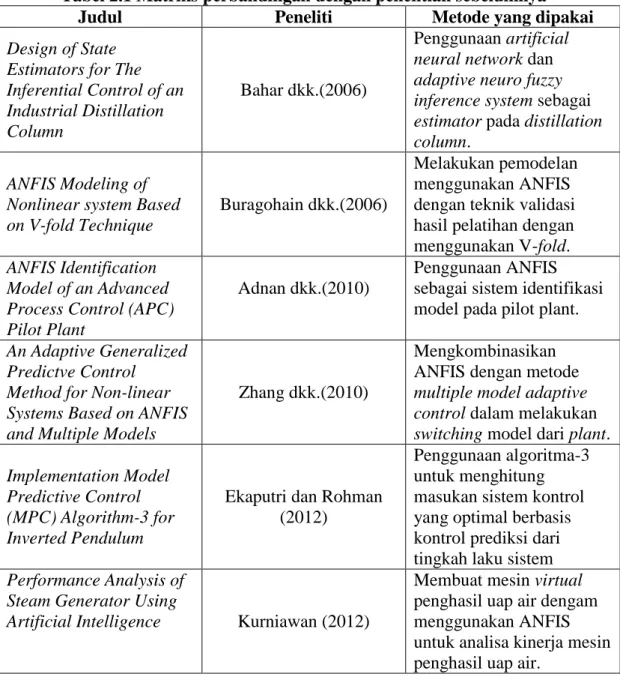
Pada Tabel 2.1 diperlihatkan perbedaan penelitian sebelumnya dan penelitian yang dilakukan oleh penulis.
Tabel 2.1 Matriks perbandingan dengan penelitian sebelumnya
Judul Peneliti Metode yang dipakai
Design of State Estimators for The Inferential Control of an Industrial Distillation Column
Bahar dkk.(2006)
Penggunaan artificial
neural network dan adaptive neuro fuzzy inference system sebagai estimator pada distillation column.
ANFIS Modeling of Nonlinear system Based on V-fold Technique
Buragohain dkk.(2006)
Melakukan pemodelan menggunakan ANFIS dengan teknik validasi hasil pelatihan dengan menggunakan V-fold.
ANFIS Identification Model of an Advanced Process Control (APC) Pilot Plant
Adnan dkk.(2010)
Penggunaan ANFIS sebagai sistem identifikasi model pada pilot plant.
An Adaptive Generalized Predictve Control
Method for Non-linear Systems Based on ANFIS and Multiple Models
Zhang dkk.(2010)
Mengkombinasikan ANFIS dengan metode
multiple model adaptive control dalam melakukan switching model dari plant.
Implementation Model Predictive Control (MPC) Algorithm-3 for Inverted Pendulum
Ekaputri dan Rohman (2012)
Penggunaan algoritma-3 untuk menghitung masukan sistem kontrol yang optimal berbasis kontrol prediksi dari tingkah laku sistem
Performance Analysis of Steam Generator Using
Artificial Intelligence Kurniawan (2012)
Membuat mesin virtual penghasil uap air dengam menggunakan ANFIS untuk analisa kinerja mesin penghasil uap air.
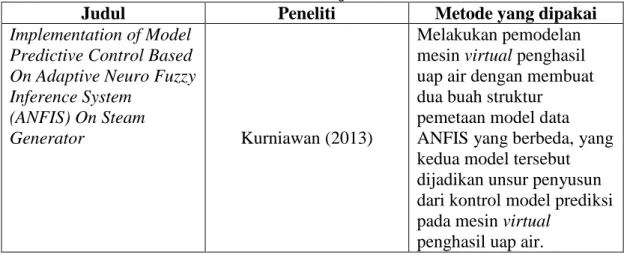
Tabel 2.1 Lanjutan
Judul Peneliti Metode yang dipakai
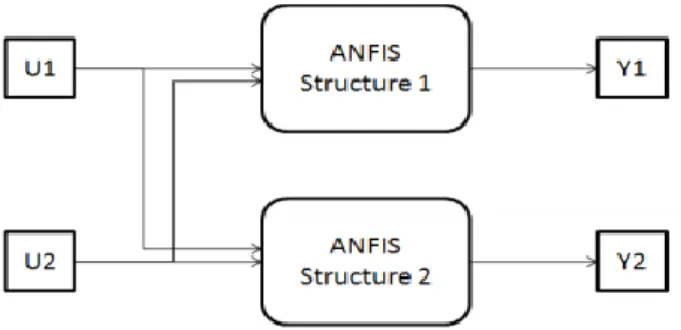
Implementation of Model Predictive Control Based On Adaptive Neuro Fuzzy Inference System
(ANFIS) On Steam
Generator Kurniawan (2013)
Melakukan pemodelan mesin virtual penghasil uap air dengan membuat dua buah struktur
pemetaan model data ANFIS yang berbeda, yang kedua model tersebut dijadikan unsur penyusun dari kontrol model prediksi pada mesin virtual
BAB III
DASAR TEORI
3.1 Mesin Penghasil Uap Air
Mesin penghasil uap air adalah sebuah perangkat yang digunakan untuk menghasilkan uap air dengan menerapkan energi panas ke air. Meskipun definisi tersebut terlihat fleksibel, dapat dikatakan bahwa mesin penghasil uap air yang lama secara umum diistilahkan katel atau boiler yang bekerja pada tekanan rendah hingga tekanan yang sedang. Berbagai macam tipe mesin penghasil uap air dapat dikombinasikan dengan sebuah unit mesin yang berbeda. Sebuah boiler menggabungkan sebuah firebox atau tungku perapian/pembakaran didalam urutan dalam pembakaran bahan bakar dan menghasilkan panas. Panas yang dihasilkan ditransferkan ke air untuk membuat uap. Mesin penghasil uap air akan menghasilkan uap jenuh sesuai dengan tekanan diatas air mendidih. Komponen-komponen dari mesin penghasil uap air secara umum adalah sebagi berikut (PT.Chevron Pacific Indonesia):
1. Feed water system
Feed water system adalah jaringan pipa serta perlengkapannya untuk
mengalirkan air dan uap panas pada mesin penghasil uap air. Feed water
system terdiri dari:
a) Feed water pump b) Feed water preheater 2. Heater
Heater merupakan komponen dari mesin penghasil uap air yang di
dalamnya terpasang pipa-pipa yang saling berhubungan menjadi satu jalur lintasan dan berfungsi sebagai tempat perpindahan energi secara konveksi yang berasal dari proses pembakaran pada burner pipa yang berisi air untuk diubah atau dikonversikan menjadi uap.
3. Burner