36
APLIKSI KONTROL PERMUKAAN BERBASIS PROGRAMMABLE LOGIC
CONTROLLER (PLC)
Muhaimin1
1
Dosen Jurusan Teknik Elektro Politeknik Negeri Lhokseumawe [email protected]
ABSTRAK
Pengaturan kinerja motor pompa dan kontrol akurat dari sebuah sistem kontrol digital dapat diperoleh dalam suatu sistem kontrol dengan menggunakan PLC, dimana parameter terkendali yang mempengaruhi sistem keseluruhan diperoleh dari masukan limit swith yang mendeteksi perubahan permukaan. Pengaturan on/off motor pompa berdasarkan sensor yang sesuai menghasilkan kinerja terbaik yang dapat dicapai sistem untuk menghasilkan respon rangkaian kendali yang merupakan keluaran PLC. Pada kondisi perubahan permukaan yang ditetapkan Pengaturan efesiensi yang digunakan yaitu dengan mencari tetapan waktu pengisian. Perbandingan antara waktu pengisian pompa dan waktu pengisian yang diproses oleh rangkaian kendali akan menunjukkan tingkat efesiensi kinerja rangkaian kendali.. Hasil penelitian menunjukkan pada variasi perubahan permukaan air rangkaian kendali menunjukkan kinerja > 90%.
Kata Kunci: Pengaturan Kinerja Motor Pompa, PLC, Tingkat efisiensi
I. PENDAHULUAN
Dalam era globalisasi saat ini, efesiensi menjadi tuntutan disegala bidang usaha sebagai salah satu kunci sukses dalam persaingan industri. Efesiensi industri berarti: kecepatan dalam menghasilkan produk, menurunkan biaya material dan efesiensi pemakaian tenaga kerja, meningkatkan kualitas, meminimalkan downtime dari mesin produksi, biaya peralatan produksi murah. PLC memenuhi kebanyakan dari persyaratan diatas dan merupakan salah satu kunci dalam meningkatkan efesiensi dalam produksi [1],[3].
Berbagai penelitian telah dilakukan sehingga pemanfaatan motor pompa sekarang tidak hanya terbatas untuk memompa air dari dalam tanah. Kini motor pompa telah memiliki peranan penting tersendiri antara lain sebagai bagian kontrol permukaan pada tangki suplai air untuk komplek perumahan, kapal laut, kontrol pendinginan dengan media air,dan perusahaan air minum. Pada industri yang memerlukan motor pompa dengan jumlah yang besar diperlukan suatu rangkaian kendali yang efesien dan ekonomis serta mudah dalam pengembangan untuk masa depan.
Dibandingkan dengan kontrol konvensional menggunakan relai, pada sistem kontrol terprogram (PLC) dapat diperoleh beberapa keuntungan diantaranya yaitu [2],[3],[5]:
Memperkecil kosumsi daya pada rangkaian kontrol.
Penginstalasian rangkaian kontrol lebih mudah dan sederhana.
Pada rangkaian kontrol yang telah jadi dapat dilakukan perubahan maupun pengembangan program.
Perubahan program tidak selalu diikuti oleh perubahan pada instalasi sistem.
Dari uraian diatas, masalah dalam penelitian ini dapat dirumuskan sebagai berikut :
1. Rangkaian kontrol motor pompa berdasarkan deteksi permukaan yang efesien dan dapat dilakukan pengembangan untuk masa akan datang dengan biaya yang ekonomis.
2. Kinerja motor pompa berdasarkan kebutuhan. 3. Rangkaian kontrol motor pompa 1 fasa dengan
menggunakan sensor permukaan untuk mengatur on/off motor pompa
Hasil yang ingin didapatkan adalah merancang rangkaian kontrol motor pompa, berdasarkan deteksi terhadap permukaan air pada tangki penampung. Rangkaian kontrol dirancang dengan menyusun suatu program dengan menggunakan Personal computer (PC) dan program ini ditransfer ke PLC, yang umumnya digunakan
untuk memperbaiki menggantikan relai
konvensional, pada terminal masukan dihubungkan sensor yang mendeteksi permukaan air batas atas dan batas bawah, ON/OFF motor pompa berdasarkan sinyal masukan sensor yang mendeteksi permukaan air pada batas permukaan yang telah ditetapkan. Desain rangkaian kontrol motor pompa ini diharapkan mampu memberikan keuntungan sebagai berikut, lebih ekonomis, dapat diandalkan, memberikan kemudahan pengembangan dimasa yang akan datang.
II. TINJAUAN PUSTAKA
Untuk mengendalikan proses produksi diperlukan strategi kontrol yang tepat agar pelaksanaan proses produksi menjadi efektif dan efisien. Pada umumnya jenis-jenis proses di industri dapat dikelompokkan dalam tiga katagori utama [3]:
37
Proses produksi yang terus-menerus
Proses produksi yang terus-menerus ini berkaitan dengan proses produksi pengolahan bahan mentah yang merupakan masukan dari proses yang dijalankan dalam tahapan-tahapan yang terus-menerus, sehingga akhirnya menghasilkan produk dengan kualitas yang diharapkan.
Proses produksi yang terputus-putus
Pengertian dari proses produksi yang terputus-putus adalah suatu proses produksinya tidak lansung merupakan barang jadi, akan tetapi merupakan proses untuk membentuk satu atau beberapa material menjadi suatu bentuk atau sifat tertentu yang diinginkan selanjutnya diteruskan ke proses produksi selanjutnya. Parameter yang dikontrol meliputi, waktu, siklus naik turunnya suhu, perbandingan volume barang yang dicampur.
Proses Produksi Berurutan
Sistem pengendalian proses produksi secara berurutan didefinisikan sebagai suatu bentuk pengendalian mesin-mesin produksi dengan urutan kerja yang telah ditentukan, dimana setiap urutan kerja dapat berbeda hasil ataupun bentuk prosesnya. Klasifikasi jenis kontrol berurutan ditentukan oleh: a. Tujuan yang hendak dicapai
b. Skala produksi dan jenis dari proses produksi yang hendak dibuat mulai dari yang sederhana sampai bentuk paling rumit.
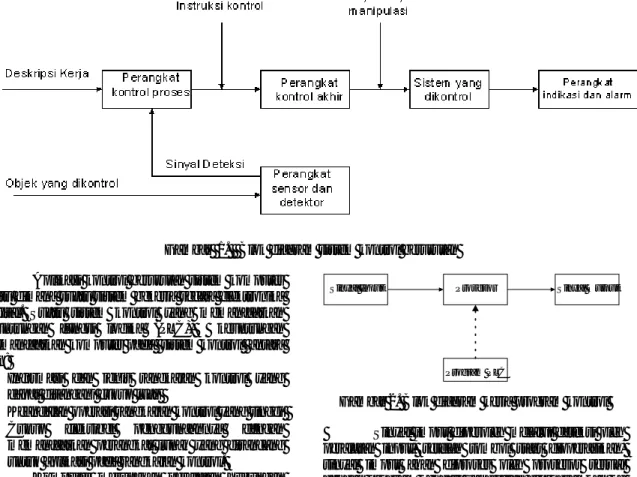
Aplikasi desain rangkaian kontrol dalam pelatihan ini berdasarkan proses produksi berurutan mempunyai bentuk seperti dalam gambar 1.
Gambar 1. Blok diagram sistem kontrol berurutan Aplikasi kontrol berurutan sistem komputer
yaitu dimana suatu sistem bekerja secara elektronika digital. Suatu sistem kontrol yang memanfaatkan keuntungan fungsi logika (PLC), keuntungan memanfaatkan komputer pada sistem kontrol antara lain:
Informasi dan jenis rangkaian kontrol yang dapat ditangani cukup luas
Keandalan operasi rangkaian kontrol yang tinggi Cukup fleksibel penggunaannya dengan
memanfaatkan perangkat lunak yang dirancang untuk aplikasi pada rangkaian kontrol.
Komputer merupakan peralatan hubungan antar muka dengan PLC untuk men dowload pogram yang telah disusun dengan komputer ke PLC. PLC merupakan peralatan yang berbasis mikroprosesor, sehingga dengan memberikan data masukan dan memprogramnya (diagram tangga), kemudian melakukan tindakan dan akan dihasilkan suatu keluaran untuk menghidupkan dan mematikan keluaran (logika 1 atau logika 0, On atau Off). Blok diagram dari rancangan kontrol untuk operasi dengan menggunakan PLC ditunjukkan dalam gambar 2.
Sinyal Input Prosesor Sinyal Output
Program PLC
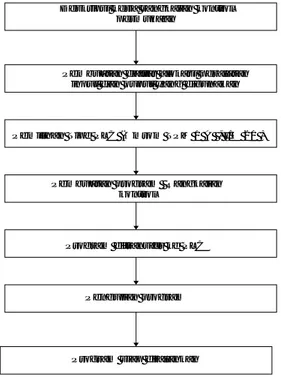
Gambar 2. Blok diagram kerja program kontrol Sinyal imput diperoleh melalui deteksi oleh peralatan input, setelah tombol start dioperasikan, sinyal imput akan diproses oleh prosesor sesuai dengan program kendali yang telah diprogramkan ke prosesor dengan alat pemograman Personal Komputer (PC), dimana hubungan antara alat pemograman dengan rangkaian kontrol tidak kontinyu (hanya pada transfer program). Hasil kerja prosesor akan berfungsi untuk menggerakan beban meliputi lampu indikator dan mengoperasikan peralatan keluaran. Dalam perancangan dan pembuatan rangkaian kontrol dangan PLC terdapat beberapa tahapan yang harus dilakukan seperti ditunjukkan dalam diagram dalam gambar 3[2],[4].
38
Deskripsi kerja rangkaian kontrolpermukaan
Pembuatan daftar alokasi peralatan input dan ouput yang digunakan
Pemilihan Tipe PLC (Omrom TPM 1 A , I/O 20 )
Pembuatan program Rangkaian kontrol
Program ditransfer ke PLC
Pengujian program
Program siap dijalankan
Gambar 3. Blok diagram prosedur pembuatan program rangkaian kontrol
III. METODE PENELITIAN
Melaksanakan pengendalian dalam suatu sistem proses produksi diperlukan sintesa sebuah sistem pengendalian sebagai berikut:
1 Waktu gejala peralihan (transient period): yaitu setiap sistem pengendalian/pengaturan diharapkan mempunyai transient time (waktu untuk gejala peralihan ) sekecil mungkin. artinya dapat proses sesingkat-singkatnya, sehingga harga keluarannya sesuai dengan
yuang diinginkan. Tetapi pada transient time yang kecil, keluaran akan mempunyai simpangan atau osilasi yang besar.
2 Waktu steady state (setelah wahtu gejala peralihan dianggap selesai), disini ada dua hal yang sangat penting yaitu: Adanya kesalahan (steady state error); output yag sebenarnya tidak sama dengan output yang diinginkan.
Melaksanakan pengendalian dalam suatu sistem proses produksi diperlukan sintesa sebuah sistem pengendalian sebagai berikut:
Pembuatan modul sistem kontrol motor pompa berdasarkan perubahan permukaan air untuk mengendalikan proses pemompaan berdasarkan sensor terhadap ketinggian permukaan air. Strategi pengendaliannya, digunakan tiga buah sensor untuk mendeteksi batas permukaan air tangki air, sensor 1 akan mendeteksi batas atas permukaan air tangki air bagian atas (tangki 1) dan pada kondisi ini motor pompa harus berhenti bekerja, sedangkan bila air mencapai batas bawah permukaan yang telah ditetapkan sensor 2 akan bekerja yang akan memberikan Sinyal komando untuk mengaktifkan motor pompa. Sensor 3 untuk mendeteksi level permukaan air tangki bagian bawah (tangki 2).
Dalam desain ini akan Digunakan motor pompa satu fasa pada tegangan kerja 220 Volt. Dalam penelitian dan pembuatan modul ini yang merupakan simulator dari kontrol permukaan dengan perencanaan : Digunakan Motor pompa 1 fasa, 220 Volt, 50 Hz. Untuk Deteksi permukaan air digunakan tiga buah limit switch dengan pemasangan bola pelampung pada tuas limit switch dengan menggunakan tali, dengan ketentuan panjang tali untuk ketiga limit swich berbeda . Kontruksinya ditunjukkan pada gambar 4.
Keterangan : R1 dan R2 = relai
39
Untuk mengisi bak bagian atas, pompa akan hidup jika permukaan air berada pada level Lb dan akan mati jika permukaan air pada level La. Pada level permukaan air Lb, pompa akan memompa air dari bak bagian bawah .
Jika permukaan air pada bak atas pada level La, maka dengan membuka kran air sehingga air mencapai level Lb, pompa bekerja akan menguras air dari bak bagian bawah.
Bila permukaan air dibak bawah sudah mencapai level Lbb dan pada bak atas belum mencapai level La, perlu ditambahkan air pada bak bagian bawah untuk meneruskan operasional pompa .
Pada panel terdapat PB 0 (start) dan Pb1 (stop ) (PB = push button) , lampu indikator kerja motor pompa.
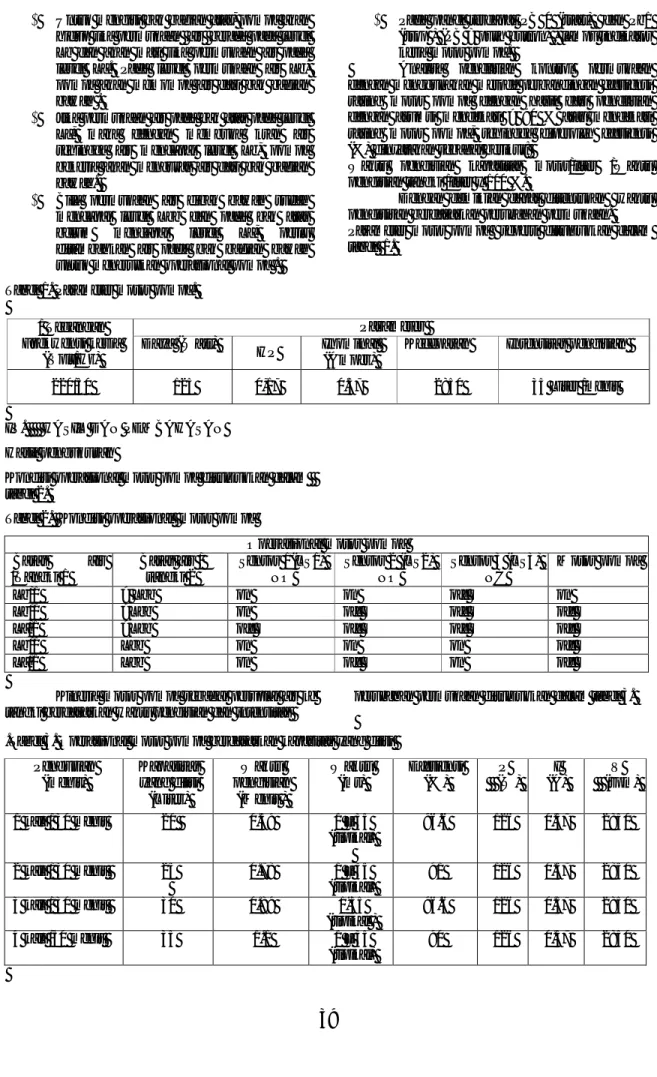
Analisa penelitian kontrol permukaan dengan menggunakan metode perbandingan efesiensi rating motor pompa dengan hasil dari penelitian dengan asumsi mendekati > 90 % atau mendekati rating motor pompa, sehingga diperoleh efesiensi (%) dinyatakan sebagai berikut:
Waktu pengisian kapasitas motor/liter /Waktu pengisian tangki /liter x 100 %.
Dengan demikian dapat ditentukan waktu pengisisan berdasarkan perubahan permukaan. Parameter motor pompa seperti ditunjukkan dalam tabel 1.
Tabel 1. Parameter motor pompa.
IV. HASIL DAN PEMBAHASAN Hasil pengukuran
Kondisi operasional motor pompa ditunjukkan dalam tabel 2.
Tabel 2. Kondisi operasional motor pompa
Operasional motor pompa
Batas air /Tangki 1 Batas air / tangki 2 Sensor 1(LS1) NO Sensor 2 (LS2) NO Sensor 3 (LS3) NC Motor pompa Lb/1 > Lbb on on off on
Lb/1 >Lbb on off off off
La/1 >Lbb off off off off
Lb/1 Lbb on on on off
La/1 Lbb on off on off
Kinerja motor pompa sebagai pesuplai air ke tangki berdasarkan waktu pengisian dan intensitas
perubahan permukaan ditunjukkan dalam tabel 3.
.Tabel 3. Operasional motor pompa berdasarkan kapasitas yang diisi Pengujian (menit) Kapasitas yang diisi (Liter) Waktu pengisian (Menit ) Waktu (ms) Efesiensi (%) P (W) I (A) V (rpm) 1 kali / 30 menit 20 0.59 1 – 35 (tipikal) 96.6 126 0.57 2850 2 kali / 30 menit 25 0.78 1 – 35 (tipikal) 91 126 0.57 2850 3 kali / 30 menit 30 0.89 1-35 (tipikal ) 96.6 126 0.57 2850 4 kali /30 menit 35 1.1 1 – 35 (tipikal) 90 126 0.57 2850 / Tegangan Frekwensi kerja (Volt/Hz) Parameter Daya (Watt) HP Inominal (Amper)
Kecepatan Intensitas pengisian
40
Gambar 5. Grafik Kapasitas Yang Diisi Vs Efesiensi
Keterangan: waktu respon tipikal merupakan waktu respon PLC TPM 1A (1-35 milidetik) dan dapat ditulis sebagai berikut :
Waktu respon total = waktu respon masukan + waktu respon eksekusi diagram tangga + waktu respon keluaran.
Analisis dengan metode perhitungan efesiensi: Efesiensi (%) = % 100 / tan _ _ / _ _ _ x liter gki pengisian Waktu liter motor kapasitas pengisian waktu Efesiensi = 96,6 %
Waktu pengisian motor 35 liter/1 menit. Bila tangki akan diisi sebanyak 20 liter :
T pengisian tangki = efisiensi liter motor pengisian waktu_ _ /20_ Maka:
Waktu pengisian tangki = 0.58 966 . 0 57 . 0 menit.
Antara waktu pengisian teoritis motor dengan waktu hasil penelitian ditunjukkan dalam tabel 4.
Tabel 4. Perbandingan Waktu Teoritis dan Hasil Penelitian
Kapasitas yang diisi Waktu pengisian teoritis Waktu pengisian motor motor (menit) hasil penelitian (menit)
20 0,57 0,59
25 0,71 0,78
30 0,86 0,89
35 1 1,1
V. KESIMPULAN
Kesimpulan yang dapat diambil dari hasil penelitian dan pembahasan sebagai berikut:
1. Urutan kerja sensor berdasarkan perubahan permukaan air.
2. Kinerja motor pompa berdasarkan diagram tangga dengan urutan logika masukan pengontrol sensor Ls1 pada kondisi on, Ls 2 pada kondisi on dan Ls 3 pada kondisi off. 3. Waktu respon rangkaian kendali yang cepat
terhadap perubahan permukaan air
4. Variasi intensitas pengisian tidak mempengaruhi waktu pengisian
5. Percepatan waktu dapat ditingkatkan dengan peningkatan kapasitas pengisian motor pompa . 6. Efesiensi yang dihasilkan > 90%.
DAFTAR PUSTAKA
[1]. W. W. John, Programmable Logic Controller, Fourth Edition , Prentice Hall, 1992.[2]. Clement-Jewery . K, Jeffcoat. J, PLC Workbook, Prentice Hall, 1995.
[2]. Omron, Sysmac CPM Programming Manual, Omron Corporatioan, Jepang , 2001.
[3]. Cahyono. A, PLC Untuk Instruktur Politeknik Se Indonesia, PEDC- ITS, 1997.
[4]. GE Fanuc, Programmable Manual , GE Fanuc Automation, 1996
[5]. A. Kent. S, Design With Microprosessors for Mechanical Enggineers, McGraw Hill,1992.