BAB III
PERANCANGAN ALAT DAN PROGRAM
3.1. Layout Single Line Diagram
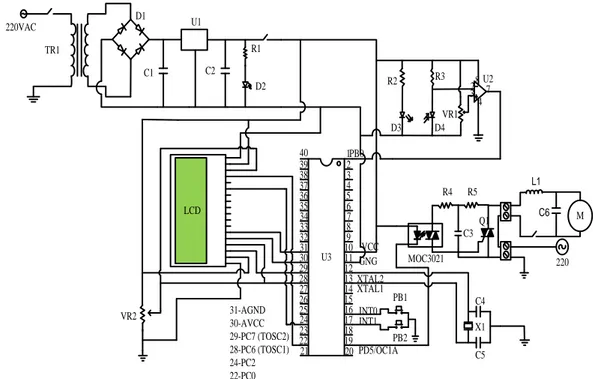
M R4 R5 C3 Q1 MOC3021 220 R2 R3 VR1 D3 D4 U2 TR1 220VAC D1 U1 D2 R1 C1 C2 C4 C5 PB1 PB2 VR2 LCD 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 2930 31 32 33 34 35 36 37 38 39 40 U3 GNGVCC PD5/OC1A PB0 XTAL1 XTAL2 31-AGND 30-AVCC 29-PC7 (TOSC2) 28-PC6 (TOSC1) 24-PC2 22-PC0 X1 7 8 2 3 4 INT0 INT1 C6 L1
Gambar 3.1. Rangkaian Keseluruhan Keterangan gambar
No. Symbol Nama
1. TR1 Trafo Step Down
2. D1 Diode Bridge 3. D2 LED Merah 4. D3 LED Putih 5. D4 Photodioda 6. U1 IC7805 7. U2 LM358 8. U3 ATMega8535 9. VR1, VR2 Variabel Resistor 10K 10. R1 Resistor 220Ω 11. R2 Resistor 100Ω 12. R3 Resistor 9k8 Ω 13. R4 Resistor 180 Ω 14. R5 Resistor 680 Ω 15. C1,C2 Kapasitor Keramik 1000µp25V 16. C3 Kapasitor Keramik 0,1µp 17. C4, C5 Kapasitor Keramik 22pf 18. X1 Cristal 16
19. Q1 Triac BT136 20. MOC3021 Optocoupler
21. PB1 Push Button Up
22. PB2 Push Button Down
23. LCD Liquid Cristal Display
Secara garis besar dari gambar single line diagram di atas kita dapat mengetahui proses dari rangkaian kendali motor induksi satu fasa. Pada awal tegangan/power supply masuk sebesar 220VAC ke dalam trafo step downuntuk diturunkan menjadi kurang lebih 10 VAC, oleh diode bridge arus tersebut akan disearahkan menjadi arus DC. Kemudian arus distabilkan oleh kapasitor dan diubah menjadi keluaran 5VDC oleh IC7805. Sebagai indikasi arus kita pasang LED dan sebuah resistor. Keluaran dari power supply dijumper menuju ATMega8535 (PIN10/VCC) untuk mengaktifkan semua sistem mikro.
Pada rangkaian counterRPM hubungkan dari LM358 ke PIN1/PB0 (counter). Sehinggga apabila LED menyala dilogikan 0 dan ketika LED tertutup maka photodioda akan menghitung 1.
Pada kaki SSR terdapat 4 kaki, kaki SSR1 dihubungkan ke PIN19(PD5/OC1A output pwm 1A). kaki SSR2 dihubungkan ke VCC/PIN10. Dan untuk kaki SSR3 dihubungkan ke sumber 220VAC dan kaki SSR4 dihubungkan ke motor.
Pada tampilan LCD dihubungkan kaki ATMega8535 PIN31/AGND (signal ground ADC), PIN30/AVCC (tegangan ADC), PIN29/PC7 (TOSC2 timer oscilator2), PIN29/PC6 (TOSC1 timer oscilator1), PIN29/PC2, dan PIN22/PC0 (serial bus clock line).
Pada push button up dihubungkan ke PIN16 (INT0/PD2 interupsi eksternal0), push button downdihubungkan ke PIN17 (INT1/PD3 interupsi eksternal1) dan pada komponen kristaldihubungkan ke PIN12/XTAL2 dan PIN13/XTAL1 (singal input clock eksternal).
3.2. Diagram Blok Perancangan
Dengan inti menggunakan mikrokontroler ATMega8535 yaitu sebagai kendali putaran kecepatan motor induksi satu fasa ini, perancangannya dimulai
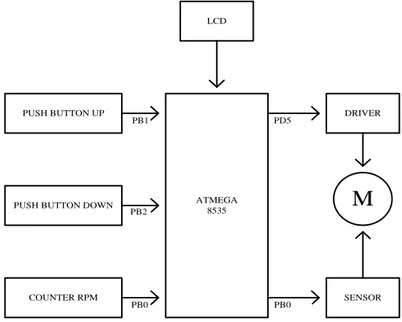
dengan pembuatan hardware dan kemudian perancangan bahasa program yang dibagi menjadi beberapa bagian. Berikut ini adalah blok diagram sistem keseluruhan dari perancangan alat pengaturan kecepatan putaran motor induksi satu fasa berbasis mikrokotroler ATMega8535 yang ditunjukan pada gambar 3.2.
LCD
PUSH BUTTON UP
COUNTER RPM
PUSH BUTTON DOWN ATMEGA 8535 DRIVER
M
SENSOR PB1 PB2 PB0 PD5 PB0Gambar 3.2. Blok Diagram Sistem Keseluruhan
Dari gambar 3.2blok diagram sistem keseluruhan di atas dapat dijelaskan secara singkat cara kerja dari sistem pengaturan kecepatan putaran motor induksi satu fasa berbasis mikrokotroler ATMega8535 ini, sehingga mengakibatkan terkendalinya putaran motor induksi tersebut. Adapun cara kerja dari sistem tersebut diuraikan secara singkat sebagai berikut :
1) Minimum sistem ATMega8535 berfungsi untuk menerjemahkan perintah yang dimasukan melalui push button ataupun variable resistor.
2) Input berupa push buttonup/down yang berfungsi untuk menaikan dan menurunkan kecepatan putaran motor yang diinginkan.
3) Rangkaian counterRPMberfungsi untuk mendeteksi banyaknya putaran per menit motor induksi tersebut.
4) Rangkaian driver motor berfungsi menerjemahkan perintah yang dikeluarkan oleh sistem mikrokontroler sebagai pengatur kecepatan putaran motor.
5) Motor berfungsi memutar piringan yang dihubungkan melalui poros pemutar. 6) Sensor berfungsi untuk mengukur kecepatan putaran motor yang dideteksi dari
piringan yang diputar oleh poros motor dan kemudian dikirim ke mikrokontroler.
7) LCD berfungsi untuk menampilkan data kecepatan putar piringan berupa RPM.
Dalam perancangan hardware ini, ada beberapa bagian utama yaitu bagianinput, bagian proses, bagian output, dan bagian support.
3.2.1 Bagian Input
Bagian input ini terdiri dari tombol tekan dan rangkaian counterRPM. Tombol tekan/push button yang berfungsi sebagai menaikan dan menurunkan kecepatan putaran motor induksi secara manual. Rangkaian counterRPM berfungsi sebagai inputan pada ATMega8535 untuk menghitung RPM dari motor. Adapun rangkaian counter RPM ada beberapa komponen utama yaitu : LED putih, photodioda, resistor variabel, LM 358, dan resistor.
3.2.2 Bagian Proses
Bagian proses merupakan bagian yang terpenting, dengan komponen utamanya adalah ic yaitu ATMega8535 sebagai pusat proses baik dari semuainput
(push buttondan sensor)dan juga output (motor dan LCD). Kaki tertentu pada ATMega8535 dihubungkan ke bagian input dan output yang diperlukan.
3.2.3. Bagian Output
Bagian output ini berfungsi untuk menunjukan keluaran dari bagian proses yang terjadi di dalam ATMega8535.Adapun bagian outputterdiri dari LCD sebagai penunjuk RPM dan motor induksi.
3.2.4. Bagian Support/Pendukung
Ada 2 bagian utama dalam pendukung yaitu rangkaian power supply dan rangkaian driver motor.power supplyberfungsi sebagai sumber tegangan di dalam rangkaian kontrol. Semua rangkaian elektronika membutuhkan sumber tegangan DC (Direct Current) untuk beroperasi, sedangkan dalam kehidupan sehari-hari yang sering dijumpai adalah sumber AC. Oleh karena itu dibutuhkan power supply untuk mengubah sumber AC menjadi DC.
Ranglaian driver motor berfungsi untuk membantu memperkuat sinyal keluaran mikrokontroler agar mampu memicu Solid state Relay(SSR). Rangkaian ini juga digunakan sebagai pemisah antara tegangan rangkaian kontrol yang berupa tegangan rendah DC terhadap rangkaian daya yang berupa tegangan tinggi AC.Cara kerja dari rangkaian ini adalah ketika mikrokontroler memberikan arus
keluaran untuk pemicuan triac, namun karena arus pemicuan yang kecil yang dihasilkan oleh mikrokontroler, maka dibutuhkan suatu komponen untuk penguatan arus keluaran dari mikrokontroler. SSR ( Solid State Relay) merupakan sebuah saklar elektronik yang tidak memiliki bagian yang bergerak. Contohnya
foto-coupled SSR, transformer-coupled SSR, dan hybrida SSR.
3.3. Pembuatan Hardware
1. Persiapkan alat dan bahan yang akan digunakan seperti tabel berikut : Tabel 3.1. Alat dan Bahan
No. Alat dan Bahan Komponen elektronika
1. Multitester ATMega8535
2. Bor PCB Soket 40 pin
3. Solder Capasitor
4. Tang Potong Ic 7805
5. Cutter Resistor
6. Wadah Plastik Kristal 16.000
7. Obeng (+) dan (-) SSR
8. Feritclorida LED Putih
9. Tespen Photodioda
10. Dll. Lm358
11. Trafo 1A
12. LCD
2. Membuat gambar skematik papan pcb dengan menggunkan aplikasi eagle. 3. Ketik file, new, schematic kemudian pilih komponen yang akan digunakan
Gambar 3.3. Tampilan Eagle
4. Jika gambar skema sudah terbentuk maka langkah berikutnya print dan difotokopi glosi.
Gambar 3.4. Skematik pada Eagle
5. Bersihkan PCB dengan sabun supaya minyak dan kotoran yang menempel di tembaga bersih.
6. Letakan gambar skema di atas PCB kemudian di setrika sampai gambar pola di gambar bisa menempel sempurna di PCB.
7. Masukan PCB ke dalam larutan feritclorida kemudian digoyang-goyang agar tembaga cepat larut.
8. Bor bagian2 kaki dari tiap-tiap komponen dan letakan komponen sesuai dengan gambar tersebut.
9. Solder dengan hati-hati agar semua komponen nantinya bisa bekerja dengan baik.
3.4. Pembuatan Bahasa Pemrograman
Dalam pembuatan bahasa pemrograman sistem kendali motor induksi satu fasa berbasis mikrokontrol saya menggunakan aplikasi Bascom-AVR yang akan dimasukan ke dalam ATMega8535. Adapun langkah untuk membuat bahasa pemrograman sebagai berikut :
1. Membuat pemrograman yang nantinya digunakan sebagai instruksi didalam ATMega8535.
Gambar 3.5. Program Bascom-AVR 3. Ketik file-new seperti pada gambar berikut :
Gambar 3.6. Tampilan Awal pada BASKOM-AVR
4. Ketik program yang akan didisain untuk dimasukan kedalam ATMega8535 pada Bascom-AVR.
a. Program Utama
$regfile = "m8535.dat" 'menggunakan Atmega8535 sebagai preprosesor
$crystal = 16000000 'menggunakan crystal clock 16 MHz $eeprom 'menggunakan fasilitas eeprom Atmega8535
b. Program Tampilan LCD
Config Lcdpin = Pin , Rs = Portc.0 , E = Portc.2 , Db4 = Portc.4 , Config Lcdpin = Pin , Db5 = Portc.5 , Db6 = Portc.6 , Db7 = Portc.7 Config Lcd = 16 * 2
Cursor Off
c. Program Pengaturan Kecepatan
Do
If Tampil> Set_up Then Incr Pwm
Pwmm = Pwm End If
If Tampil< Set_up Then Pwmm = Pwm + 100 End If Start Timer0 Wait 3 Stop Timer0 Locate 2 , 6 Tampil = Counter0 * 20 Locate 2 , 1 Lcd "counter:" ; Tampil ; " rpm " Counter0 = 0 Locate 1 , 1 Lcd "SetSpeed:" ; Set_up ; "rpm " Pwm1a = Pwmm Pwm1b = Pwmm Pwm_eprom = Pwmm Pwmm = Pwm_eprom Loop End.
5. Setelah program selesai dibuat maka langkah selanjutnya menyimpan dan memasukan ke dalam ATMega8535 melalui USB ISP_Atmel.
Gambar 3.7. USB ISP_Atmel 6. Klik progisp.
Gambar 3.8. Progisp
7. Selanjutnya klik erase kemudian load flash cari file yang tadi sudah disimpan dan langkah terahir klik auto tunggu proses pemasukan program ke dalam ATMega8535 berjalan. Lihat tampilan pada LCD.
Gambar 3.9.Load Program Pada Progisp. 8. Siap diuji coba.
3.6. Diagram Alir Proses
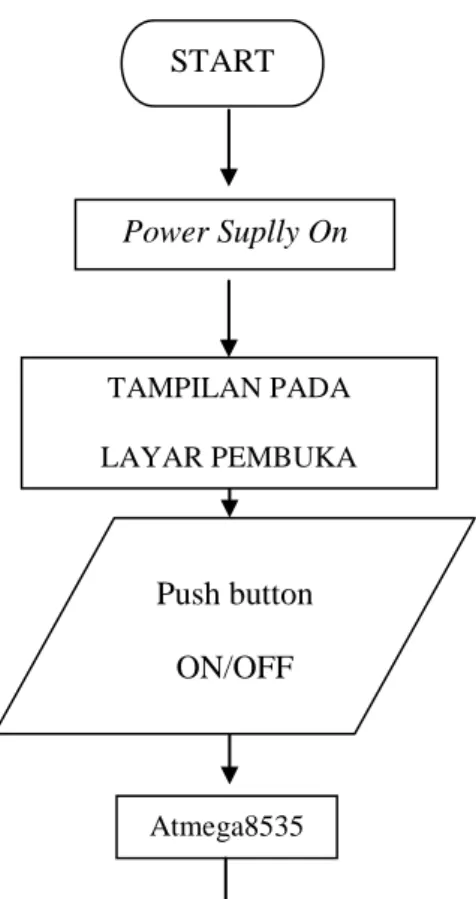
Atmega8535 START Power Suplly On Push button ON/OFF TAMPILAN PADA LAYAR PEMBUKA
Gambar 3.10.Alur Program Utama
Start merupakan bagian awal mula semua sistemakan mulai berkerja sehingga perlu dipastikan terlebih dahulu semua kondisi komponen dan kabel dalam keadaan sudah terpasang dengan benar.
Power supply on kondisi ini menunjukan bahwa pada bagian supply
tegangan menuju bagian sistem proses berfungsi dengan baik. Cara mengetahui bahwa power supply sudah teraliri arus listrik yaitu dengan melihat nyala lampu LED dan diuji dengan multitester untuk mengetahui berapa tegangan yang di keluarkan oleh power supply.
Layar pembuka menampilkan kinerja dari adanya proses dalam mikrokontrol dan munjukan kecepatan settingan dan hasil dari counter RPM yang telah dideteksi oleh sensor.
Push button up/downdigunakan untuk menaikan kecepatan motor induksi dan juga menurunkan kecepatan motor sesuai dengan kecepatan yang dikehendaki.Misalkan menghendaki kecepatan motor 1300 RPM maka tekan
tombol push button up sampai setingan sesuai dengan yang dikehendaki. Begitu juga saat ingin menurunkan kecepatan motor maka tekan push button down.
ATMega8535 merupakan pusat proses semua proses kontrolbaik dari bagian input dan outputyang nantinya akan diproses untuk di keluarkan ke bagian
output yaitu motor dan LCD.
Sensor untuk mendeteksi berapa kecepatan putaran dari. Dalam sensor terdapat photodioda, LED putih dan IC358 sebagai op-amp atau selisih dari perbedaan ketika LED terbuka ataupun tertutup motor yang kemudian diproses pada ATMega8535.
Dirver motor menggunakan SSR yang berfungsi sebagai pemisah antara rangkaian kontrol dengan rangkaian motor dan juga sebagai penerima singal keluaran pwm untuk pencacahan tegangan.
Counter bagian untuk menghitung berapa banyak putaran motor bedanya dengan sensor yaitu sensor hanya mendeteksi singal 1 dan 0 yang terbentuk pada photodioda.
LCD berfungsi sebagai tampilan dari proses yang terjadi pada counter dan ATMega8535.Menggunakan LCD 16x2 karena menyesuaikan kebutuhan dalam penggunaanya yaitu menampilkan kecepatan setingan dan penghitungan RPM motor.
Motor induksi satu fasa sebagai penerima output dari SSR yang telah dimasukan singal pwm yang di keluarkan oleh ATMega8535.