Diktat
Instrumentasi Sistem Kendali
Jurusan Teknik Elektro
Universitas Komputer Indonesia
2010
Matakuliah
: Instrumentasi Sistem Kendali
Pokok Pembahasan
• Dasar Sistem Kontrol dan Mekatronika
– Mengenal Mekatronika (Sistem control, sistem listrik, dan mekanik)
– Istilah-istilah Sistem Pengukuran – Teknik Digital
• Sistem Penggerak
– Motor DC
– Motor Stepper – Motor Servo
• Power Suplay
– Tenaga Surya – Baterai
– Catu Daya
• Sensor
– Pengkondisian Sinyal
– Mengenal Berbagai Sensor – Sensor Jarak
– Sensor Panas – Sensor Posisi
– Teknologi Wireless
• Kontrol
– PLC – PID
Dasar Sistem Kontrol dan Mekatronika
Definisi Sistem Kontrol
1.
Secara umum sistem pengendalian adalah
susunan komponen-komponen fisik yang dirakit
sedemikian rupa sehingga mampu mengatur
sistemnya sendiri atau sistem diluarnya. Sistem
kontrol adalah proses pengaturan atau
pengendalian terhadap satu atau beberapa
besaran (variabel, parameter) sehingga berada
pada suatu harga
range
tertentu. Istilah lain
sistem kontrol atau teknik kendali adalah teknik
pengaturan, sistem pengendalian, atau sistem
pengontrolan.
Dasar Sistem Kontrol dan Mekatronika
Definisi Sistem Kontrol
3. Contoh sistem pengaturan yang paling mendasar adalah kendali on-off saklar listrik. Aktivitas menghidupkan dan mematikan saklar menyebabkan adanya situasi saklar hidup atau mati. Masukan on atau off mengakibatkan terjadinya proses pada suatu pengendalian saklar listrik sehingga sistem bekerja sesuai dengan kondisi yang diinginkan, yaitu listrik menyala atau mati. Keadaan on-off (hidup atau mati) merupakan masukan, sedangkan mengalir dan tidak mengalirnya listrik merupakan keluaran. Suatu keadaan dimana listrik sudah dihidupkan namun tidak menyala , berarti ada yang salah pada sistem tersebut. Proses yang dicontohkan itu mengilustrasikan sistem kendali yang terjadi secara manual.
Seperti Gambar dibawah ini :
Untuk menggambarkan sistem pengendalian, kita bisa ilustrasikan dengan sebuah perangkat yang sering dikenal dalam kehidupan sehari -hari yaitu ”sekering”. Sekering merupakan alat yang dipergunakan untuk memutus arus listrik dan biasanya dipasang pada instalasi listrik PLN atau perangkat elektronik. Sekering akan putus apabila diberi beban arus listrik yang berlebihan, dan akibatnya lampu akan padam.
Menurut Distefano dkk (1992), ada tiga jenis sistem
pengaturan dasar yakni :
1.
Pengendalian
alamiah
,
contohnya
pengendalian suhu tubuh manusia, mekanisme
buka-tutup pada jantung, sistem peredaran
darah, sistem syaraf, sistem kendali pankreas
dan kadar gula dalam darah, sistem
pengaturan adrenalin, dan sistem kendali
lainnya yang ada pada makhluk hidup.
2.
pengendalian
buatan
,
contohnya
yaitu
mekanisme
on-off
pada
saklar
listrik,
mekanisme buka-tutup pada keran air, sistem
kontrol untuk menghidupkan dan mematikan
televisi/radio/tape, kendali pada mainan anak
-anak, pengaturan pada kendali suhu ruangan
ber -AC, serta kendali perangkat elektronik
seperti pada kulkas, freezer dan mesin cuci.
Dasar Sistem Kontrol dan Mekatronika
Sistem pengendalian proses
•
Sistem pengendalian proses adalah gabungan
kerja dari alat-alat pengendalian otomatis.
Semua peralatan yang membentuk sistem
pengendalian
disebut
istrumentasi
pengendalian proses. Contoh sederhana
istrumentasi pengendalian proses adalah
saklar temperatur yang bekerja secara otomatis
mengendalikan suhu setrika. Instrumentasi
pengendalinya disebut
temperature switch
,
saklar akan memutuskan arus listrik ke elemen
pemanas apabila suhu setrika ada di atas titik
yang dikehendaki. Sebaliknya saklar akan
mengalirkan arus listrik ke elemen pemanas
apabila suhu setrika ada di bawah titik yang
dikehendaki. Pengendalian jenis ini adalah
kendali ON -OFF.
•
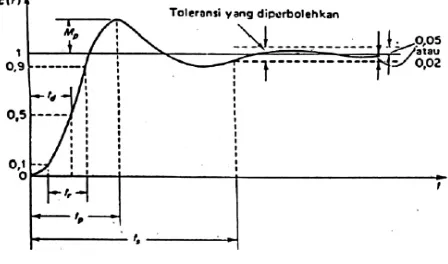
Tujuan utama dari suatu sistem pengendalian
adalah untuk mendapatkan unjuk kerja yang
optimal pada suatu sistem yang dirancang.
Untuk
mengukur
performansi
dalam
pengaturan, biasanya diekspresikan dengan
ukuran -ukuran waktu naik (tr), waktu puncak
(tp),
settling time
(ts),
maximum overshoot
Gambar respon sistem :
•
Dalam optimisasi agar mencapai target optimal
sesuai yang dikehendaki, maka sistem kontrol
berfungsi
:
melakukan
pengukuran
(
measurement
),
membandingkan
(
comparison
), pencatatan dan penghitungan
(
computation
) dan perbaikan (
correction
).
Dasar Sistem Kontrol dan Mekatronika
Parameter-parameter yang dikendalikan
Ada banyak parameter yang harus dikendalikan di dalam suatu proses diantaranya yang paling umum ada empat yaitu :
1. tekanan (pressure) di dalam suatu pipa/vessel, 2. laju aliran (flow) di dalam pipa,
3. temperatur di unit proses penukar kalor ( heat exchanger), dan
4. level permukaan cairan di sebuah tangki.
• Disamping dari keempat tersebut di atas, parameter lain yang dianggap penting dan perlu dikendalikan karena keperluan spesifik proses diantaranya pH di industri kimia, warna produk di industri pencairan gas (LNG). Apabila yang dikendalikan pada sistem pengaturan adalah tekanan pada proses pembakaran di ruang bakar, maka sistem pengendaliannya disebut sistem kendali tekanan pembakaran di ruang bakar . Jika yang dikendalikan adalah temperatur pada sebuah alat penukar kalor, maka sistem pengendaliannya disebut sistem kendali temperatur alat penukar kalor. Apabila yang dikontrol adalah level fluida pada bejana tekan suatu industri perminyakan, maka system konrolnya dinamakan sistem kendali level cairan. • Hal ini perlu dimengerti karena terkadang orang
Dasar Sistem Kontrol dan Mekatronika
Mengapa perlu instrumentasi dalam
pengendalian?
•
Manusia diciptakan mempunyai kelebihan dan
kekurangan. Diantara kekurangan manusia
adalah mempergunakan indra sebagai alat
ukur. Sebagai sebuah ilustrasi indra peraba
manusia dipergunakan untuk mengukur kondisi
air yang berbeda di dalam suatu bejana,
namun apakah indra peraba itu mampu
mencerminkan kondisi pengukuran yang
sebenarnya . Untuk menjawabnya maka
perhatikan fenomena gambar 1.3.
Gambar 1.3 Indra peraba untuk pengukuran
Dasar Sistem Kontrol dan Mekatronika
Mengapa perlu instrumentasi dalam
pengendalian?
Apa yang terjadi apabila kedua tangan kita yang
baru saja dimasukan masing masing di air hangat
dan air dingin, kemudian dicelupkan ke dalam air
suam kuku?
Tentunya tangan kiri yang habis dicelupkan di air
hangat akan terasa dingin dan tangan kanan yang
habis dimasukan air es akan terasa air itu panas.
Mengapa begitu?
Dan jawabnya adalah :
Dasar Sistem Kontrol dan Mekatronika
Penganalisisan sistem pengendalian
Dalam mengendalikan variabel proses adalah dengan analisis dan perancangan. Beberapa faktor yang harus dikuasai untuk melakukan analisis sistem pengendalian atau teknik pengaturan adalah:
1. Penguasaan dasar-dasar matematika
Dasar analisis dan perancangan sistem pengendalian yang sering dijumpai yaitu persamaan diferensial, Transpormasi Laplace, Transpormasi Z, Fourier, matrik, dan sebagainya.
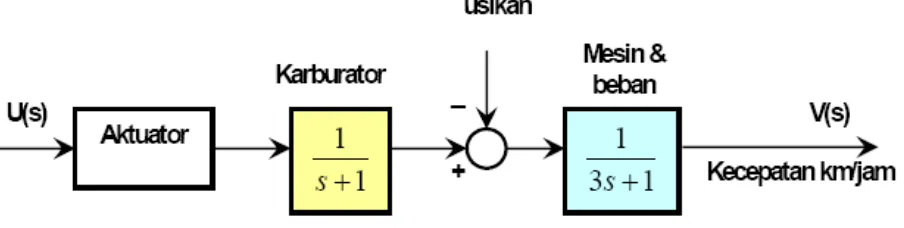
2. Penguasaan pemodelan matematika sistem fisik
Sebuah sistem fisik akan sulit di analisis apabila model matematika sistem tidak diketahui, suatu misal pada gambar 1.6 karburator dimodelkan dengan dan beban mesin dengan
3. Respon sistem pengendalian
Untuk memudahkan analisis biasanya dipergun akan respon transien danfrekuensi. Contoh respon diilustrasikan pada gambar 1.2
4. Kestabilan sistem pengendalian
Dasar Sistem Kontrol dan Mekatronika
Contoh-contoh aplikasi sistem pengaturan
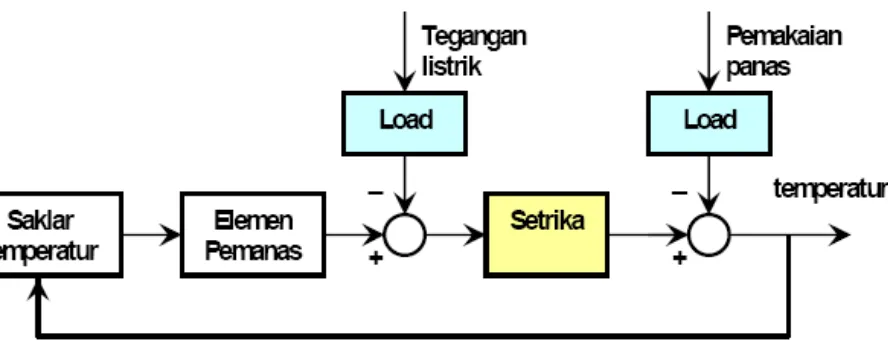
1. Sistem pengendalian temperatur dari suatu setrika otomatis
Suatu setrika listrik secara termostatis mengatur panas yang dihasilkan pada setrika. Masukan ke sistem tersebut adalah suhu acuannya, yang diset secara tepat oleh termostat, sedangkan keluarannya adalah suhu yang dihasilkan sebenarnya yang bisa dideteksi dengan cara pengukuran temperatur. Apabila termostat mendeteksi suhu keluaran lebih kecil dari masukan, arus listrik mengalir dan memanaskan elemen pemanas hingga suhu menyamai acuannya dan secara otomatis arus akan diputus lagi.
Dasar Sistem Kontrol dan Mekatronika
Contoh-contoh aplikasi sistem pengaturan
1. Sistem pengendalian temperatur dari suatu setrika otomatis
Dasar Sistem Kontrol dan Mekatronika
Contoh-contoh aplikasi sistem pengaturan
2. Sistem pengendalian jelajah mobil
Dalam berkendaraan di jalan raya terkadang ada pembatasan untuk kecepatan berkendara, misalnya rambu hanya mengijinkan 40 km/jam. Dengan adanya rambu tersebut, setiap pengendara harus mematuhi dengan cara memelihara supaya kecepatan kendaraan berkisar pada angka tersebut. Sebagai alat untuk memonitor biasanya dipasang speedometer dan acuannya adalah kecepatan 40 km/ jam. Apabila terjadi penyimpangan antara yang tercatat pada speedometer terhadap kenyataan kecepatan kendaraan, maka pengendara senantiasa berusaha untuk melakukan pengendalian larinya kendaraan dengan menambah atau mengurangi kecepatan putaran mesin. Proses yang dilakukan pengendara tersebut secara tidak langsung mensinergikan beberapa komponen yang mempengaruhi sistem kendali jelajah kendaraan.
Dasar Sistem Kontrol dan Mekatronika
2. Sistem pengendalian jelajah mobil
Contoh-contoh aplikasi sistem pengaturan
Dasar Sistem Kontrol dan Mekatronika
Contoh-contoh aplikasi sistem pengaturan
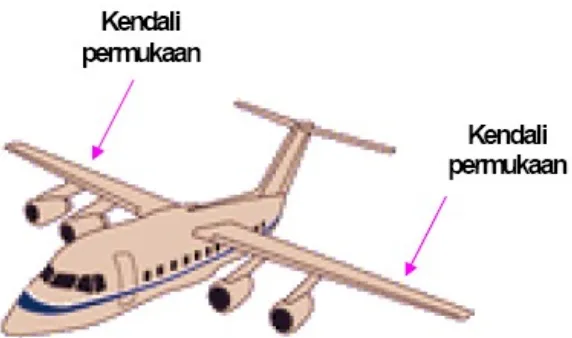
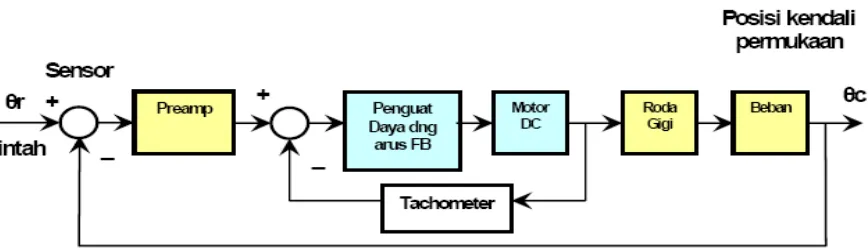
3. Sistem kendali posisi aerofoil sayap pesawat terbang
Pada pesawat terbang sebenarnya banyak sekali sistem yang harus dikendalikan misalnya kecepatan terbang, ketinggian terbang, sistem pembakaran, buka -tutup pintu pesawat, dan beberapa komponen pada mesin pe sawat terbang. Terlebih pada sistem pesawat tempur tentunya akan lebih banyak lagi yang perlu dikontrol karena memerlukan gerakan-gerakan manuver yang lebih dan juga untuk mengendalikan sistem persenjataannya. Dalam kasus gambar 1.9 merupakan contoh sistem kendali permukaan pada aerofoil sayap pesawat terbang. Besaran yang dikendalikan diekspresikan dalam besaran sudut terhadap posisi sudut acuan.
Dasar Sistem Kontrol dan Mekatronika
2. Sistem kendali posisi aerofoil sayap pesawat
terbang
Contoh-contoh aplikasi sistem pengaturan
Soal-soal latihan
1. Jelaskan definisi sistem pengendalian!
2. Sebut dan jelaskan 5 contoh sistem kendali buatan manusia!
3. Sebut dan jelaskan 5 contoh sistem kendali alamiah yang berada pada tubuh manusia!
4. Pada sistem pendingin AC ruangan, apa yang disebut masukan dan apa yang disebut keluaran?
5. Tetapkan masukan dan keluaran pada mesin freezer atau kulkas!
6. Mengapa dalam pengukuran diperlukan instrumen pengukur!
7. Gambarkan diagram sistem pengendalian temperatur dari suatu setrika otomatis dan jelaskan!
8. Gambarkan dan jelaskan diagram sistem pengendalian jelajah mobil!
9. Jelaskan sistem pengendalian yang terdapat karburator motor atau mobil!
10. Berikan contoh dan penjelasan tentang aplikasi teknik kendali di dunia industri
DAFTAR PUSTAKA
• Distefano, J.J., Stubberud, A.R., and Williams, I.J., 1992,
Teori dan Soal-soal Sistem Pengendalian dan Umpan Balik (Terjemahan Herman Widodo Soemitro) Seri Scaum, Edisi SI, Erlangga, Jakarta.
• Dorf, R.C., 1983. Sistem Pengaturan, Edisi 3, Erlangga, Jakarta
• Kuo, B.C., 1995, Teknik Kontrol Automatik, Edisi 7, Jilid 1, Aditya Media, Jogjakarta.
• Ogata, Katsuhiko., 1997, Teknik Kontrol Otomatik, Edisi 2 Jilid 1/2, Erlangga Jakarta
• Pakpahan, Sahat, 1988, Kontrol Otomatik Teori dan Penerapan , Penerbit Erlangga, Jakarta.
Istilah-istilah dalam sistem pengendalian
1. Masukan
Masukan atau
input
adalah rangsangan
dari luar yang diterapkan ke sebuah
sistem
kendali
untuk
memperoleh
tanggapan
tertentu
dari
sistem
pengaturan. Masukan juga sering disebut
respon keluaran yang diharapkan.
2. Keluaran
Keluaran atau
output
adalah tanggapan
sebenarnya yang didapatkan dari suatu
sistem kendali.
3. Plant
Istilah-istilah dalam sistem pengendalian
4. Proses
Berlangsungnya operasi pengendalian
suatu variabel proses, misalnya proses
kimiawi, fisika, biologi, ekonomi, dan
sebagainya.
5. Sistem
Kombinasi atau kumpulan dari berbagai
komponen yang bekerja secara
bersama-sama untuk mencapai tujuan tertentu.
6. Diagram blok
Bentuk kotak persegi panjang yang
digunakan
untuk
mempresentasikan
model matematika dari sistem fisik.
Contohnya adalah kotak pada gambar 2.3
7. Fungsi Alih (
Transfer Function
)
Istilah-istilah dalam sistem pengendalian
8. Sistem Pengendalian Umpan Maju
Sistem kendali ini disebut juga sistem
pengendalian loop terbuka . Pada
sistem ini keluaran tidak ikut andil
dalam aksi pengendalian sebagaimana
dicontohkan gambar 2.1. Di sini kinerja
kontroler tidak bisa dipengaruhi oleh
input referensi.
9. Sistem Pengendalian Umpan Balik
Istilah-istilah dalam sistem pengendalian
10. Sistem Pengendalian Manual
Istilah-istilah dalam sistem pengendalian
11. Sistem Pengendalian Otomatis
Istilah-istilah dalam sistem pengendalian
12. Variabel terkendali (
Controlled variable
)
Besaran atau variabel yang dikendalikan,
biasanya besaran ini dalam diagram kotak
disebut
process variable (PV)
. Level fluida pada
bejana pada gambar 2.4 merupakan variabel
terkendali
dari
proses
pengendalian.
Temperatur pada gambar 1.5 merupakan
contoh variabel terkendali dari suatu proses
pengaturan.
13. Manipulated variable
Masukan dari suatu proses yang dapat diubah
-ubah atau dimanipulasi agar
process variable
besarnya sesuai dengan
set point
(sinyal yang
diumpankan pada suatu sistem kendali yang
digunakan sebagai acuan untuk menentukan
keluaran sistem kontrol). Masukan proses pada
gambar 2. 4 adalah laju aliran fluida yang
keluar dari bejana , sedangkan masukan
proses dari gambar 2.5 adalah laju aliran fluida
yang masuk menuju bejana. Laju aliran diatur
dengan mengendalikan bukaan katup.
14. Servomekanisme
Istilah-istilah dalam sistem pengendalian
15. Sistem Pengendalian Digital
Dalam sistem pengendalian otomatis
terdapat komponen -komponen utama
seperti
elemen
proses,
elemen
pengukuran
(
sensing
element
dan
transmitter
), elemen controller (
control
unit
), dan
final control element (control
value
).
16. Gangguan (
disturbance
)
Suatu
sinyal
yang
mempunyai
kecenderungan untuk memberikan efek
yang melawan terhadap keluaran sistem
pengendalian
(variabel
terkendali).
Istilah-istilah dalam sistem pengendalian
17. Sensing element
Bagian paling ujung suatu sistem pengukuran
(
measuring system
) atau sering disebut
sensor. Sensor bertugas mendeteksi gerakan
atau fenomena lingkungan yang diperlukan
sistem kontroler. Sistem dapat dibuat dari
sistem yang paling sederhana seperti sensor
on/off menggunakan
limit switch
, sistem
analog, sistem bus paralel, sistem bus serial
serta si stem mata kamera. Contoh sensor
lainnya yaitu
thermocouple
untuk pengukur
temperatur
, accelerometer
untuk pengukur
getaran, dan
pressure gauge
untuk pengukur
tekanan.
18. Transmitter
Alat yang berfungsi untuk membaca sinyal
sensing element dan mengubahnya supaya
dimengerti oleh controller.
19. Aktuator
Istilah-istilah dalam sistem pengendalian
20. Transduser
Piranti yang berfungsi untuk mengubah satu bentuk energi menjadi energi bentuk lainnya atau unit pengalih sinyal. Suatu contoh mengubah sinyal gerakan mekanis menjadi energi listrik yang terjadi pada peristiwa pengukuran getaran. Terkadang antara transmiter dan tranduser dirancukan, keduanya memang mempunyai fungsi serupa. Transduser lebih bersifat umum, namun transmiter pemakaiannya pada sistem pengukuran.
21. Measurement Variable
Sinyal yang keluar dari transmiter, ini merupakan cerminan sinyal pengukuran.
22. Setting point
Besar variabel proses yang dikehendaki. Suatu kontroler akan selalu berusaha menyamakan variabel terkendali terhadap set point.
23. Error
Selisih antara set point dikurangi variabel terkendali. Nilainya bisa positif atau negatif, bergantung nilai set point dan variabel terkendali. Makin kecil error terhitung, maka makin kecil pula sinyal kendali kontroler terhadap plant hingga akhirnya mencapai kondisi tenang ( steady state)
24. Alat Pengendali (Controller)
Alat pengendali sepenuhnya menggantikan peran manusia dalam mengendalikan suatu proses. Controller merupakan elemen yang mengerjakan tida dari empat tahap pengaturan, yaitu
a.membandingkan set point dengan measurement variable
b.menghitung berapa banyak koreksi yang harus dilakukan, dan
Istilah-istilah dalam sistem pengendalian
25. Control Unit
Bagian unit kontroler yang menghitung
besarnya koreksi yang diperlukan.
26. Final Controller Element
Bagian yang berfungsi untuk mengubah
measurement variable
dengan memanipulasi
besarnya
manipulated variable
atas dasar
perintah kontroler
.
27. Sistem Pengendalian Kontinyu
Sistem pengendalian yang ber jalan secara
kontinyu, pada setiap saat respon sistem
Istilah-istilah dalam sistem pengendalian
28.
Sistem pengendalian Adaptive
Sistem
pengendalian
yang
mempunyai
kemampuan
untuk
beradaptasi
dengan
perubahan lingkungan disekitarnya.
29. Sistem Pengendalian Diskrit (
digital
)
Istilah-istilah dalam sistem pengendalian
30. Respons / Rangsangan
Setiap isyarat masukan yang dimasukkan dari
luar yang mempengaruhi keluaran terkendali.
31. Sistem Regulasi Otomatis
Sistem pengendalian loop tertutup
• Umumnya sistem pengendalian loop tertutup terdiri dari bagian -bagian seperti terlihat pada gambar 2.9.
1. Input referensi, r(t)
Disebut juga set point, adalah sinyal yang diumpankan pada suatu sistem pengendalian yang digunakan sebagai acuan untuk menentukan outp ut sistem pengendalian tersebut. Sinyal-sinyal yang banyak digunakan sebagai input referensi adalah:
a. Sinyal impulse b. Sinyal step c. Sinyal ramp d. Sinyal parabolik e. Sinyal sinusoida
2. Sinyal feedback, b(t)
Sistem pengendalian loop tertutup
3. Summing point (error detector)
Bagian yang berfungsi untuk menjumlahkan semua sinyal yang masuk padanya.Pada gambar 2.9, sinyal yang masuk adalah input referensi (bertanda positif)dan sinyal feedback (bertanda negatif).
4. Sinyal error, e(t)
Sinyal yang dihasilkan dari perbedaan antara input referensi dan sinyal feedback. Jadi e(t)= r(t)- b(t)
5. Elemen pengatur
Bagian dari sistem pengendalian yang berfungsi untuk menghasilkan sinyal pengendalian untuk mengendalikan proses/plant. Kontroler sebenarnya terdiri dari bagian summing point dan elemen kontrol, tetapi kadang -kadang elemen kontrol ini dalam diagram blok sistem pengendalian ditulis sebagai kontroler, misalnya pada gambar 2.7.
6. Sinyal pengendalian, m(t)
Disebut juga sinyal termanipulasi (manipulated signal) adalah sinyal yang dihasilkan dari kontroler. 7. Sinyal output, c(t)
Sinyal keluaran dari plant atau proses yang dikendalikan oleh kontroler.
8. Elemen feedback
Soal-soal latihan
1. Jelaskan istilah-istilah plant, sistem, gain, lintasan, loop dan fungsi alih dalam sistem pengendalian!
2. Apa yang dimaksud sistem pengendalian umpan balik!
3. Jelaskan keuntungan dan kerugian untuk sistem kendali jerat terbuka!
4. Sebutkan keunggulan dan kekurangan untuk sistem kendali jerat terbutup!
5. Berikan contoh dan penjelasan mengenai sistem pengendalian manual!
6. Berikan contoh dan penjelasan tentang sistem pengendalian otomatis!
7. Jelaskan pengertian variabel terkendali!
8. Terangkan pengertian variabel terukur dan variabel termanipulasi!
9. Gambarkan diagram blok sistem pengendalian arah otomobil dan jelaskan!
DAFTAR PUSTAKA
•
Kuo, B.C., 1995,
Teknik Kontrol Automatik
,
Edisi 7, Jilid 1, Aditya Media, Jogjakarta.
•
Distefano, J.J., Stubberud, A.R., and
Williams, I.J., 1992,
Teori dan Soal-soal
Sistem Pengendalian dan Umpan Balik
(Terjemahan Herman Widodo Soemitro) Seri
Scaum, Edisi SI, Erlangga, Jakarta.
•
Dorf, R.C., 1983
. Sistem Pengaturan
, Edisi 3,
Erlangga, Jakarta
•
Gunterus, F., 1994, Falsafah Dasar Sistem
Pengendalian Proses, Penerbit : Elex Media
Komputindo, Jakarta.
Sistem Pengukuran
Besaran
•
Mekanis:
strain, force,pressure, moment, torque,
displacement, velocity, acceleration, mass flow
rate, dll.
•
Thermis:
heat flux, specific heat, thermal
conductivity, dll.
•
Electrik:
voltage, current
Power Supply
• Memberikan energi yang dibutuhkan oleh komponen-komponen aktif.
• Power suply dapat berupa tegangan AC/DC • Sumber-Sumber tenaga listrik :
1. Tenaga Surya
Tenaga surya menghasilkan tenaga listrik dari cahaya matahari. Biasanya tenaga surya digunakan sebagai sumber tenaga untuk baterai isi ulang (recharging), tetapi sekarang ini sudah ada yang disebut dengan
“solar engine” (mesin surya). Komponen utama dari
“solar engine” adalah tenaga surya itu sendiri, kapasitor dan sirkuit pemicu.
cara kerja : ketika terkena cahaya, tenaga surya mulai terisi pada kapasitor, sehingga kapasitor akan menyediakan tenaga listrik, setelah veltase dari kapasitor bertambah, otomatis sikuit pemicu (trigger circuit) akan bergetar. Ketika tenaga pada kapasitor sudah terpenuhi, sirkuit pemicu akan memicu SCR
Power Supply
2. Baterai
Power Supply
3. Catu Daya
Transducer
• Peralatan analog yang merubah besaran
fisis menjadi besaran elektris.
• Contohnya: Pada Strain gage perubahan
besaran
strain
(Δε)
dikonversikan
menjadi perubahan resistansi (ΔR) yang
akhirnya
dikonversikan
menjadi
perubahan tegangan (Δv)
Signal Conditioner
• Merubah,
memanipulasi,
dan
mengkompensasi
besaran
output
transducer menjadi besaran elektrik yang
dapat diproses lebih lanjut.
• Pada Strain Gage, besaran output
transducer
(ΔR)
dirubah
menjadi
tegangan (ΔV).
Amplifier
• Menaikkan
besar
sinyal
tegangan
keluaran Signal Conditioner.
• Bila keluaran Signal Conditioner hanya
berkisar milivolt atau kurang, maka
amplifier akan meningkatkannya
100-1000 kali menjadi 1-10 volt.
Recorder
• Alat ukur tegangan (voltmeter) yang
dapat langsung menampilkannya atau
merekamnya.
• Recorder dapat berupa analog atau
digital.
• Keluaran Amplifier adalah sinyal analog
yang dapat ditampilkan oleh Analog
recorder
seperti:
Osciloscope,
Oscilograp.
Data Processor
• Merubah sinyal analog menjadi
sinyal digital untuk diproses lebih
lanjut oleh perangkat digital, seperi
microcomputer
(PC)
dan
microprocessor.
• Outputnya digunakan lebih lanjut
untuk Engineering Analysis.
Command Generator
• Peralatan
yang
menghasilkan
signal analog sebagai referensi
dalam sistem kontrol tertutup
Controller
• Perangkat yang men-drive proses
untuk menjaga suatu kuantitas
terjaga dalam suatu sistem kontrol
tertutup
Pengukuran
• untuk analisa data
Open Loop System
Experimental Error
Element Error
• Error setiap alat sesuai spesifikasi
pembuat
• Dinyatakan dalam persen terhadap
nilai
full scale
• Misal: 2%
– nilai kesalahan maksimal = 2%x
angka full scale
• Jika alat dioperasikan tidak pada
full scale
– nilai kesalahan maksimal tetap,
mengikuti saat full scale
– Misal operasi pada half scale:
– Error max = 4%x skala yang
Experimental Error
Element Error (2)
Akumulasi Element Error (3)
•
Akumulasi kesalahan tiap alat dalam sistem
• E
a :
error alat terakumulasi
• Estimasi:
Experimental Error
Improper Functioning
• penggunaan tidak sesuai fungsi(≠)
• berhubungan dengan perawatan
dan penyesuaian alat
(maintenance & adjustment)
• Kalibrasi
• Zero offset
Experimental Error
Kalibrasi
Sensitivitas
•
Response curve
suatu alat
• garis lurus dengan kemiringan
yang menunjukkan sensitivitas alat
Zero Offset
• deviasi
Response line
(pada
sumbu vertikal)
• garis lurus dengan kemiringan
Experimental Error
Range
• Daerah kerja
•
Response curve
masih linier /
masih dalam batas toleransi
• : batas atas dengan deviasi
response curve maksimum
OPTOELEKTRONIKA
Pada awal perkembangan semikonduktor telah diketahui bahwa dioda dan transistor peka terhadap cahaya dan juga beberapa devais semikonduktor dapat mengeluarkan cahaya, karena proses rekombinasi.
Dari gejala tsb dapat dikembangkan devais-devais sensitif cahaya baik sebagai detektor ataupun pemancar. Pada optoelektronika berkaitan dengan cahaya tampak maupun tak tampak (IR maupun UV). Spektrum gelombang cahaya tsb merupakan bagian dari spektrum gelombang elektromagnet, seperti ditunjukka pada Gambar 1 berikut.
Gambar 1, Spektrum cahaya
Ada banyak sumber cahaya buatan seperti lampu
pijar, lampu fuorescent, lampu gas discharge
(Xenon, Merkuri, dll), namun konsentrasi kita pada
sumber cahaya yang dihasilkan dari bahan
semikonduktor, seperti LED. Tujuan dari peraga
elektronik adalah untuk mengimplemen informasi
visual dari peralatan menggunakan devais yang
memancarkan cahaya maupun termodulasi oleh
cahaya, termasuk pada lampu pijar, lampu gas
discharge (tabung Nixie), LCD dan LED.
Masing-masing peraga tadi berbeda dalam hal
kemampuannya dan kebutuhannya, seperti warna
dan kecerahannya, disipasi daya, ukuran,
tegangan dan arus yang diperlukan dan
pengaruhnya terhadap lingkungan (seperti suhu,
getaran, dll).
LED
LED = light emitting diode adalah sebuah dioda
yang dapat memancarkan cahaya jika mendapat
bias maju. Karakteristik LED mirip dengan dioda
p-n. LED ini sibuat dengan berbagai macam panjang
gelombang sehingga dapat dibedakan dari
warnanya, umumnya adalah warna merah (~ 650
nm), hijau (~550 nm) dan kuning (~600 nm).
Disamping ada LED yang memancarkan cahaya
infra merah (~950 nm) yang biasanya dipakai
sebagai sumber cahaya pada sistem sensor,
sedangkan LED cahaya tampak dipakai untuk
indikator, peraga dalam instrumen digital, dll.
Ada beberapa keunggulan penggunaan LED dibandingkan dengan lampu pijar untuk sistem elektronika, seperti:
1. LED beroperasi pada tegangan rendah dan kompatibel dengan level tegangan logika TTL 5 volt, disamping juga butuh konsumsi daya yang rendah sekitar ~ 20 - 30 mW.
2. berumur panjang, MTBF ~ 100.000 jam
3. konstruksi semikonduktor lebih andal dibandingkan dengan konstruksi filamen yang mudah pecah.
4. ukurannya kecil. 5. murah
6. emisi LED hampir monokromatis dan tersedia dalam beberapawarna.
7. dapat diberi pulsa pada frekuensi tinggi
Selanjutnya untuk mengemudikan LED dari rangkaian logika perlu juga diberi hambatan pembatas, hal ini karena pada gerbang TTL standar dapat menerima (sink) arus hingga 16 mA (yaitu IOL), sedangkan TTL standar hanya dapat menyalurkan (source) arus hingga 1 mA. Kondisi ini tidak cukup terang untuk sebagian besr aplikasi LED. Kesulitan ini dapat diatasi dengan gerbang yang dapat di-pull-up dengan sebuah hambatan, seperti gerbang 7410, seperti ditunjukkan pada rangkaian berikut ini.
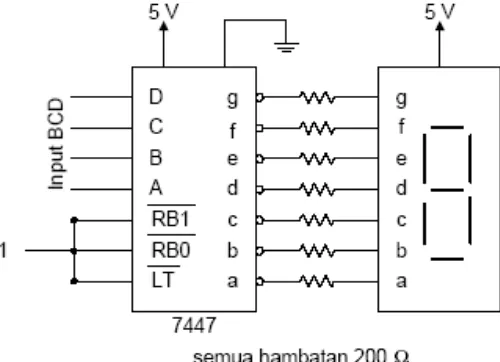
Untuk memperagakan pada peraga 7-segmen perlu
decoder, umumnya yang tersedia adalah decoder BCD ke 7-segmen, sehingga format data input berupa format BCD. Disamping decoder perlu driver untuk memberikan arus ke peraga minimum ~ 10 mA agar dapat menyalakan 7-segmen. Decoder dan driver tersedia dalam satu chip IC, seperti 7447. IC 7447 digunakan untuk peraga dengan tipe anoda bersama. Rangkaiannya ditunjukkan pada Gambar 3.
Gambar 3, Rangkaian peraga 7-segmen
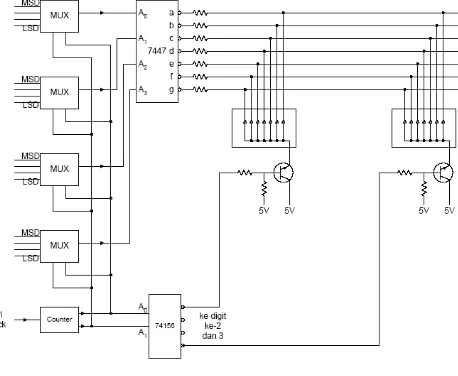
Keuntungan dari rangkaian ini adalah koneksi pengkawatan kawat jauh lebih sedikit disamping jumlah komponennya juga lebih sedikit, serpti ditunjukkan pada gambar berikut.
Gambar 4, Rangkaian peraga BCD 4-digit
Sensor Cahaya
Devais ini bekerja berdasarkan perubahan karakteristik listrik pada saat energi cahaya mengenai devais tsb sehingga kondutivitas devais berubah. Ada beberap devais sensor cahaya diantaranya: fotoresistor, fotodioda, fototransistor, fotodarlington, fototiristor.
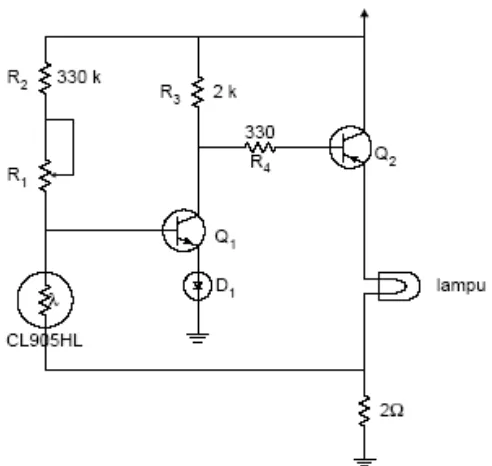
Fotoresistor
Gambar 5, Ilustrasi penggunaan fotocel CdS
Fotodioda
Fotodioda bekerja mirip dengan dioda Zener yaitu pada bias mundur. Pada saat cahaya dengan panjang gelombang yang sesuai mengenai fotodioda, maka akan ada arus yang mengalir. Sehingga energi cahaya dipergunakan untuk menghasilkan pasangan elektron-hole didekat hubungan. Arus tsb kira-kira sebanding dengan intensitas total cahaya datang. Perbandingan arus pada saat dikenai cahaya dengan pada saat tidak ada cahaya ternyata cukup besar. Karakteristik ini diperlukan
sebagai transducer cahaya. Umumnya fotodioda terbuat dari silikon dengan waktu reaksi ~ 1ns. Selanjutnya fotodioda juga dipergunakan untuk mengkonversi energi solar menjadi energi listrik. Karakteristik
Tanggapan spektral, (dinyatakan dalam %), untuk
fotodioda Silikon tanggapan maksimum pada panjang gelombang sekitar 800 nm.
Arus gelap adalah arus mundur fotodioda pada saat tak ada cahaya. Arus gelap ini bergantung pada suhu, biasanya arus gelap ini cukup besar dibandingkan dengan dioda hubungan (arus mundur) dalam orde nA atau μA tergantung pada luas permukaan devais.
Effisiensi kuantum yaitu perbandingan jumlah pasangan hole elektron yang terjadi secara optis dengan jumlah foton datang. Effisiensi ini lebih besar dari 90 % pada panjang gelombang puncak. Tanggapan fotodioda lebih cepat dibandingkan dengan fotoresistor. Fotodioda dapat mengikuti pulsa cahaya dengan frekuensi tinggi dalam orde MHz, sehingga cocok untuk applikasi transmisi data dengan serat optis.
Fototransistor
Hal ini dapat dikurangi dengan cara memberikan bias seperti ditunjukkan pada Gambar 6.
Gambar 6. Contoh rangkaian dengan fototransistor untuk mendeteksi cahaya lemah.
Optokopler
Optokopler seringkali dikenal sebagai optically coupled isolator (OCI) terdiri atas sebuah devais pemancar cahaya (biasanya IRED) dan sebuah fotodetektor (biasanya fototransistor, light-sensitive SCR (LASCR),
atau sel fotokonduktif). Antara pemancar dan penerima tidak ada hubungan listrik dan keduanya diisolasi dengan bahan transparan.
Relay elektromekanis dapat juga dipergunakan untuk mengisolasi tegangan DC namun tanggapannya lambat, sedangkan pada optokopler dapat dikurangi hingga waktu
switchingnya kurang dari 10 μs. Trafo juga dapat mengisolasi tegangan DC namun jauh lebih berat dan lebih besar disamping itu ada pengaruh beban dengan sumber (dikenal sebagai pembebanan pantulan /reflected loading). Sedangkan pada optokopler pada sisi beban sangat terisolasi dengan sumber. Karena keunggulan-keunggulan tsb dipergunakan pada:
1. Penerima data bersifat optis, terutama jika transducer jauh dari rangkaian sehingga ada beda potensial antar kedua terminal ground.
2. Aplikasi medis, seperti pada ECG 3. Relay terisolasi secara optis
Gambar 6. Contoh rangkaian dengan optokopler
Macam-macam Sensor ?
Sensor Kedekatan (Proximity), yaitu sensor atau saklar yang dapat mendeteksi adanya target (jenis logam) dengan tanpa adanya kontak fisik. Sensor jenis ini biasanya tediri dari alat elektronis solid-state yang terbungkus rapat untuk melindunginya dari pengaruh getaran, cairan, kimiawi, dan korosif yang berlebihan. Sensor ini dapat diaplikasikan pada kondisi penginderaan pada objek yang dianggap terlalu kecil/lunak untuk menggerakkan suatu mekanis saklar. Prinsip kerjanya adalah dengan memperhatikan perubahan amplitudo suatu lingkungan medan frekuensi tinggi. Sensor Magnet - juga disebut relai buluh, adalah alat yang akan terpengaruh medan magnet dan akan memberikan perubahan kondisi pada keluaran. Seperti layaknya saklar dua kondisi (on/off) yang digerakkan oleh adanya medan magnet di sekitarnya. Biasanya sensor ini dikemas dalam bentuk kemasan yang hampa dan bebas dari debu, kelembapan, asap ataupun uap.
Sensor Ultrasonik - bekerja berdasarkan prinsip pantulan gelombang suara, dimana sensor ini menghasilkan gelombang suara yang kemudian menangkapnya kembali dengan perbedaan waktu sebagai dasar penginderaannya. Perbedaan waktu antara gelombang suara dipancarkan dengan ditangkapnya kembali gelombang suara tersebut adalah berbanding lurus dengan jarak atau tinggi objek yang memantulkannya. Jenis objek yang dapat diindera diantaranya adalah: objek padat, cair, butiran maupun tekstil.
Sensor Tekanan - sensor ini memiliki transduser yang mengukur ketegangan kawat, dimana mengubah tegangan mekanis menjadi sinyal listrik. Dasar penginderaannya pada perubahan tahanan pengantar (transduser) yang berubah akibat perubahan panjang dan luas penampangnya.
Sensor Suhu- ada 4 jenis utama sensor suhu yang biasa digunakan; thermocouple (T/C), resistance temperature detector (RTD), termistor dan IC sensor. Thermocouple pada pokoknya terdiri dari sepasang transduser panas dan dingin yang disambungkan/ dilebur bersama, perbedaan yang timbul antara sambungan tersebut dengan sambungan referensi yang berfungsi sebagai pembanding. Resistance Temperature Detector (RTD) didasari pada tahanan listrik dari logam yang bervariasi sebanding dengan suhu. Kesebandingan variasi ini adalah presisi dengan tingkat konsisten/kestabilan yang tinggi pada pendeteksian tahanan. Platina adalah bahan yang sering digunakan karena memiliki tahanan suhu, kelinearan, stabilitas dan reproduksibilitas. Termistor adalah resistor yang peka terhadap panas yang biasanya mempunyai koefisien suhu negatif, karena saat suhu meningkat maka tahanan menurun atau sebaliknya. Jenis ini sangat peka dengan o perubahan tahan 5% per C sehingga mampu mendeteksi perubahan suhu yang kecil.