LEMBAR PENGESAHAN
RANCANG BANGUN MOBILE ROBOT AVOIDER DAN KONTROL MENGGUNAKAN JOYSTICK WIRELESS PS2
BERBASIS MIKROKONTROLER ARDUINO
Oleh
FIKRI IBRAHIM N NIM : 1137030028
Disetujui dan disahkan, Pada Desember 2016
Dosen Pembimbing
Mada Sanjaya W.S., Ph.D NIP. 198510112009121005
Pembimbing Lapangan
Aceng Sambas, M.Sc NIK. 12031307900011
Mengetahui, Ketua Jurusan Fisika
ABSTRAK
Nama : Fikri Ibrahim N
Program Studi : Fisika Instrumentasi dan Komputasi
Judul : Rancang Bangun Robot Mobile Avoider dan Kontrol Menggunakan Joystik Wireless PS2 Berbasis Mikrokontroler Arduino.
KATA PENGANTAR
Segala puji dan syukur kehadirat Allah Tuhan semesta alam. Berkat rahmat-Nya peneliti dapat melaksanakan dan menulis laporan Kerja Mandiri Terpantau di Bolabot Techno Robotic Institute. Laporan ini disusun untuk memenuhi syarat kelulusan mata kuliah Kerja Mandiri Terpantau pada Program Studi Fisika Jurusan Fisika Sains Fakultas Sains dan Teknologi Universitas Islam Negeri Sunan Gunung Djati Bandung.
Penelitian yang dilakukan pada kerja mandiri terpantau adalah “RANCANG BANGUN ROBOT MOBILE AVOIDER DAN KONTROL MENGGUNAKAN JOYSTICK WIRELESS PS2 BERBASIS MIKROKONTROLER ARDUINO”. Dalam melaksanakan dan menulis laporan ini peneliti banyak mendapat bantuan, arahan dan bimbingan dari berbagai pihak. Karena itu, sudah selayaknya dalam kesempatan ini saya menghaturkan banyak terimakasih kepada semua pihak yang, baik secara langsung maupun tidak langsung, telah membantu penulis menyelesaikan penelitian ini. Terutama sekali, penulis sangat berhutang budi kepada:
1. Mada Sanjaya W.S., Ph.D selaku Direktur Bolabot Techno RobotIc Institute atas bimbingan, saran, arahan, motivasi dan petunjuk yang diberikan selama Kerja Mandiri Terpantau sampai penyusunan laporan ini.
2. Aceng Sambas, M.Si selaku pembimbing Kerja Mandiri Terpantau yang telah banyak membantu selama berlangsungnya penelitian.
4. Seluruh rekan Fisika Instrumentasi dan Komputasi UIN Sunan Gunung Djati Bandung khususnya angkatan 2013 yang telah banyak membantu dan memberi semangat dalam penelitian dan penulisan laporan ini.
Balasan yang paripurna untuk segala kebajikan hanya dari Allah. Dialah Tuhan Semesta Alam yang Maha Tunggal, Maha Kuasa, Maha Bijaksana dan Maha Sempurna.
Sepenuhnya penulis menyadari bahwa dalam laporan ini masih terdapat beberapa kelemahan atau kekurangan. Adanya saran dan kritikan dari pembaca akan lebih menyempurnakan laporan ini di masa yang akan datang.
Mudah-mudahan hasil laporan penelitian ini dapat memberikan manfaat kepada seluruh pembaca. Aamiin !
Bandung, 28 November 2016
DAFTAR ISI
LEMBAR PENGESAHAN...i
ABSTRAK...ii
KATA PENGANTAR...iii
DAFTAR TABEL...vii
DAFTAR TABEL...vii
DAFTAR GAMBAR...viii
BAB I PENDAHULUAN...9
1.1 Latar Belakang...9
1.2 Kerangka dan Ruang Lingkup...10
1.3 Rumusan Masalah...10
1.4 Tujuan penelitian...11
1.5 Metode Pengumpulan Data...12
1.6 Sistematika Penulisan...13
BAB II...14
TINJAUAN UMUM LEMBAGA...14
2.1 Profil Bolabot Techno Robotic Institute...14
2.2 Sejarah Bolabot Tecno Robotics Institute...14
2.3 Visi dan Misi Bolabot Techno Robotics Institute...15
2.4 Struktur Organisasi Bolabot Techno Robotics Institute...16
BAB III...17
LANDASAN TEORI...17
3.2 Sensor Ultrasonic HC-SR04...18
3.3 Motor Servo DC...17
3.4 Joystick Wireless PS2...20
BAB IV...23
METODELOGI PENELITIAN...23
4.1 Skema Penelitian...23
4.2 Alat dan Bahan...24
4.3 Prosedur Penelitian...24
4.3.1 Penetuan Desain Ragkaian Mobile Robot...24
4.3.2 Penentuan Ketepatan Sistem Control Joystick Wireless PS2...27
BAB V...28
HASIL DAN PEMBAHASAN...28
5.1 Karakteristik Joystick Wireless PS2...28
5.2 Karakteristik Sensor Ultrasonic HC-SR04...32
5.3 Perbandingan Rancang Bangun Mobile Robot...33
BAB VI...34
KESIMPULAN DAN SARAN...34
6.1 Kesimpulan...34
6.2 Saran...34
DAFTAR
Tabel 4.1 Alat dan Bahan Robot Joystick Wireless PS2...24
YTabel 5.1 Pengujian komunikasi Transmitter dan Receiver Joystick wireless PS2 ...30
YTabel 5.2 Pertukaran data untuk tombol joystick digital...31
YTabel 5.3 Pertukaran data untuk tombol joystick analog...31
DAFTAR GAMBAR Gambar 3.1 Arduino uno...17
Gambar 3.2 Sistem pewaktu (A) dan sensor ultrasonik HC-SRO4 (B) Gambar 3.3 Motor servo DC...19
Gambar 3.4 Prinsip kerja motor servo DC Gambar 3.5 Connector PS2 controller...21
Gambar 3.6 Range koordinat (A). Joystick wireles PS2 (B)...22
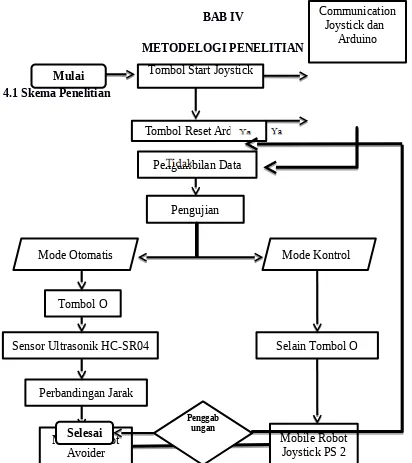
Gambar 4.1 Diagram Alir Penelitian...23
Gambar 4. 3 Desain robot pada software Proteus 7.8
Gambar 5.1 Pengiriman 1 byte data secara serial sinkron
Gambar 5.2 Timing d iagram p engambilan d ata
Gambar 5.3 Prinsip kerja sensor Ultrasonic HC-SR04
Gambar 5.4 Pengujian sensor u ltrasonic HC-SR04 jarak terhadap objek
BAB I PENDAHULUAN
1.1 Latar Belakang
Kemajuan ilmu pengetahuan dan teknologi (IPTEK) di Dunia saat ini berada dalam keadaan yang sangat baik dibanding 20 tahun kebelakang. Indonesia merupakan suatu Negara berkembang yang lagi – lagi sedang merintis untuk terus berkembang dan maju. Dalam hal ini kemajuan teknologi sangat didasari dari kesadaran masyarakat yang harus menerapkan dan melakukan segala sesuatu dengan seefisien dan seefektif mungkin. Berbagai hasil dari kemajuan IPTEK telah memberikan banyak kemudahan dan keuntungan dalam kehidupan sehari-hari. Salah satunya dalam bidang robotika.
secara otomatis. Dimana pada saat itu energi listrik belum ditemukan sehingga semua robotnya beroprasi hanya memanfaatkan konsep mekanik dan konsep air.
Robot terdiri dari dua jenis, yaitu robot kontrol (manual) dan robot automatis. Sistem kontrol manual berupa rangkaian elektronik yang mampu mengendalikan sistem mekanik tetapi masih menggunakan kendali manusia. Dalam hal ini terdapat interaksi manusia dengan robot. Pada keaadaan ini terdapat tiga tingkatan interaksi antara manusia dengan robot yaitu (Pitowarno, 2006:35): Manusia sebagai kontroler robot sepenuhnya. Manusia sebagai manager dari operasi robot. Manusia dan robot berada dalam kesetaraan.
Sedangkan sistem kontrol otomatis mampu megendalikan sistem mekanik tanpa diawasi dan diberikan input masukan data yang berulang-ulang, karena didalamnya diberikan suatu rangkaian processor untuk memberikan perintah kendali secara otomatis. Dimana faktor manusia tidak dominan dalam aksi pengendalian yang dilakukan pada sistem tersebut. Peran manusia digantikan oleh sistem kontroler yang telah diprogram secara otomatis sesuai fungsinya, sehingga bisa memerankan seperti yang dilakukan manusia.
Robot kontrol dan robot otomatis merupakan dua jenis robot yang berbeda dengan system pengendalian yang berbeda, namun fungsi sama. Hal ini merupakan suatu pemborosoan. Mengingat fungsi robot sebagai pembantu manusia, maka perlu dibuat sebuah robot yang dapat beroprasi secara system control dan system automatis. Oleh karena itu peneliti tertarik untuk mengangkat tema robot yang dapat beroprasi dengan kontrol dan otomatis.
1.2 Kerangka dan Ruang Lingkup Penelitian 1.2.1 Kerangka Penelitian
Lagkah pertama yang dilakukan untuk penelitian ini adalah mengumpulkan referensi mengenai pemanfaatan sensor jarak HC-SRO4 dan pemanfaatan joystick wireless PS2 sebagai control robot. Kemudian dilakukan perancangan alat yang menempatkan sensor jarak HC-SR04 sebagai mode otomatis robot, dan joystick wireless PS2 sebagi mode control manual robot.
B. Analisa Dasar
Pada tahap ini akan dilakukan analisis data yang didapat melalui hasil sensor jarak HC-SR04 dan data yang dikeluaran dari setiap tombol joystick wireless PS2. Semua data yang didapat difungsikan sebagai kode dasar pengendali robot. Dimana data sensor difungsikan sebagai kode jarak robot ke penghalang, sedangkan data tombol joystick sebagai control robot secara manual.
C. Simulasi
Simulasi yang dilaukan adalah simulasi deteksi sensor jarak terhadap penghalang dan responnya terhadap output robot yang dibuat pada software ISIS Proteus 7.8. sedangkan simulasi joystick wireless PS2 difungsikan sebagai system on / off LED.
D. Aplikasi
Pada tahap ini, dilakukan pengaplikasian sensor HC-SR04 dan joystick wireless PS2 sebagai robot mobile yang dapat dikontrol dengan joystick wireless PS2 dimana didalamnya terdapat mode manual (dikontrol) dan mode otomatis.
1.2.2 Ruang Lingkup Penelitian
Penelitian ini difokuskan pada pembuatan robot mobile control dan otomasis menggunakan joystick wireless PS2 sebagai manual control robot dan sensor ultrasonic HC-SR04 sebagai system otomatis robot mobile.
1.3 Rumusan Masalah
1. Bagaimana cara membuat robot control wireless menggunakan
1. Membuat robot control wireless menggunakan joystick wireless PS2. 2. Membuat robot control dan otomatis menggunakan joystick wireless
PS2 dan sensor ultrasonic HC-SR04.
3. Memfungsikan sensor ultrasonic HC-SR04 sebagai mode otomatis robot.
1.5 Metode Pengumpulan Data
Dalam penelitian ini digunakan empat metode pengumpulan data, yaitu:
1.5.1 Studi Literatur
Studi literatur pada penelitian ini berupa pembelajaran mengenai perkembangan penelitian yang akan dilakukan. Perkembangan penelitian tersebut diambil dari jurnal maupun skripsi yang dijadikan sebagai referensi dan buku serta modul-modul yang terkait dengan penelitian.
1.5.2 Perakitan Perangkat Keras (Hardware)
Tahap ini merupakan perakitan perangkat keras yang digunakan dalam penelitian seperti sensor jarak HC-SR04, Mikrokontroler Arduino Uno, Motor Servo, Motor DC. Motor Driver, joystick wireless PS2, dan LCD 16x2.
1.5.3 Pembuatan Program
Tahap ini merupakan tahap pembuatan program untuk mengolah data masukan (input) dan menghasilkan data keluaran (output) yang di inginkan dengan menggunakan perangkat lunak (software) Arduino 1.6.3.
Eksperimen merupakan tahap akhir dari penelitian. Dimana dilakukan pengambilan data pengaruh jarak, kalibarasi motor servo dengan sensor ultrasonic SR04, penggabungan control joystick wireless PS2 dengan ultrasonic HC-SR04, dan analisis system kerja robot mobile.
1.6 Sistematika Penulisan
Pembahasan pokok dari setiap bab pada penelitian ini diuraikan secara singkat.
BAB I Pendahuluan. Mendeskripsikan mengenai latar belakang yang memperkenalkan gambaran tentang prinsip kerja sitem, ruang lingkup masalah, tujuan, metode pengumpulan data dan sistematika penulisan.
BAB II Tinjauan Umum Lembaga. Berisi tentang sejarah dan hal-hal yang berhubungan dengan lembaga.
BAB III Dasar Teori. Berisi tentang tinjauan pustaka atau teori-teori penunjang yang berhubungan dengan penelitian.
BAB IV Metode Penelitian. Berisi tentang proses penelitian secara lengkap pembuatan dan perakitan robot mobile.
BAB V Hasil dan Pembahasan. Berisi tentang hasil dan analisis dari eksperimen robot.
BAB II
TINJAUAN UMUM LEMBAGA
2.1 Profil Bolabot Techno Robotic Institute
Bolabot Techno Robotics Institute adalah sauatu lembaga yang bergerak di bidang riset dan edukasi teknologi robotika. Penelitian yang dilakukan di lembaga ini meliputi otomatisasi alat, kontrol alat, pengolahan sinyal, kecerdasan buatan, robot vision dan Instrumentasi pengukuran alat-alat fisika. Selain pengembangan di bidang riset, Bolabot Techno Robotics Institute juga bergerak di bidang pendidikan robotik kepada siswa sekolah dasar sampai mahasiswa ataupun guru. Bolabot Techno Robotics Institute banyak mengembangkan perlatan yang mendukung untuk praktikum Elektronika Dasar, Fisika Dasar dan Fisika Komputasi.
2.2 Sejarah Bolabot Tecno Robotics Institute
Bolabot Techno Robotics Institute merupakan sebuah lembaga riset di bidang robotika dan Instrumentasi serta bergerak dalam bidang pendidikan serta mencerdaskan generasi bangsa. Membantu generasi muda utuk meyalurkan ekspersi di bidang sains dan teknologi.
Bolabot Techno Robotics Institute berdiri pada tanggal 11 Maret 2012 yang berlokasi pertama kali di Jalan Raya Cinunuk No.146, Cileunyi, Kabupaten Bandung. Bolabot didirikan dari buah pemikiran yang lahir dari seorang dosen dan bebrapa mahasiswa yang ingin melakukan revolusi pendidikan dan memiliki cita-cita untuk mendirikan suatu lembaga riset yang bertaraf internasional. Bolabot menampung ide-ide kreatif dan menjadi inspirasi untuk riset dan pengembangan teknologi otomatisasi. Bolabot Techno Robotics Institute adalah lembaga yang memproduksi alat-alat mekanik, ribotik dan Instrumentasi sebagai media pembelajaran.
Dalam perjalanannya Bolabot mengalami perpindahan tempat, yang pertama bertempat di kontor BRI Cinunuk lantai 2 selama satu tahun, kemudian pindah ke Legit yang berada di daerah Cipadung kota Bandung selama satu tahun. Kemudian Bolabot kembali pindah tempat ke Kompek Permata Biru Blok K No 106, Desa Cinunuk, Kec. Cileunyi Kab. Bandung. Selama kegiatan penelitian Bolabot banyak melakukan kegiatan seperti ROBOCOM, Ekspo Robotik dan demo robotik ke setiap sekolah. Banyak penelitian baru yang dilakukan di Bolobot dan mengembangkan produk dari hasil penelitian sebelumnya.
2.3 Visi dan Misi Bolabot Techno Robotics Institute Visi
Visi dari Bolabot Techno Robotics Institute adalah menjadi ikon perusahaan berbasis edukasi, riset dan teknologi robotika Indonesia.
Misi
Misi dari Bolabot Techno Robotics Institute yaitu:
1. Mengembangkan pendidikan robotik yang menarik, kreatif dan menyenangkan.
2. Menyelenggarakan pendidikan non formal sebagai penunjang kecakapan dan belajar.
3. Melakukan berbagai penelitian untuk menciptakan inovasi teknologi. 4. Menciptakan berbagai produk untuk memenuhi pendidikan dan industri. 5. Menciptakan usaha-usaha baru dibidang teknologi.
2.4 Struktur Organisasi Bolabot Techno Robotics Institute
Bolabot Techno Robotics Institute memiliki tiga lembaga fungsional yang terdiri dari:
1. Presiden Direktur adalah pemimpin dan penanggung jawab lembaga sekaligus sebagai pengawas yang mengeluarkan kebijakan terhadap lembaga. Mada Sanjaya WS Ph.D., lahir dicirebon tanggal 11 Oktober 1985 beliau adalah dosen sekaligus direktur utama Bolabot Techno Robotics Institute.
2. Departemen Riset dan Development adalah lembaga riset yang bertugas menentukan tema-tema penelitian dan bertanggung jawab dalam desin penelitian. Departemen ini merupakan inti dari Bolabot Techo Robotics Institute segala penelitian dan inovasi teknologi menjadi tanggung jawab departemen ini. Dian Syah Maulan AS, lahir di Tasikmalaya tanggal 9 Mei 1988. beliau menyukai bidang instrumentasi dan robotika semenjak di bangku kuliah, dan beliau di tunjuk oleh direktur untuk memimpin departemen riset dan development.
BAB III
LANDASAN TEORI
3.1 Arduino UNO
Arduino UNO merupakan sebuah mikrokontroler dengan platform komputasi fisik yang bersifat open source. Fungsinya sebagai rangkaian elektronik berbentuk board. Memiliki kemampan untuk mengkonversi data analog dalam bentuk digital karena dilengkapi dengan input firut ADC (Analog Digital Converter). Dengan dilengkapi output berfitur USART (Universal Synchronous-Asynchronous Receiver/Transmitter) Arduino mampu menerima dan megirim data. Rx pada pin 0 dan Tx pada pin 1.
Arduino UNO terdiri dari 13 pin digital dan 5 pin analog. Nilai sebuah pin output analog dapat diprogram antara 0 – 255, dimana hal itu mewakili nilai tegangan 0 – 5V (Ilmanza, 2012). IC yang digunakan Arduino UNO adalah ATmega 328.
Gambar 3.1 Arduino uno
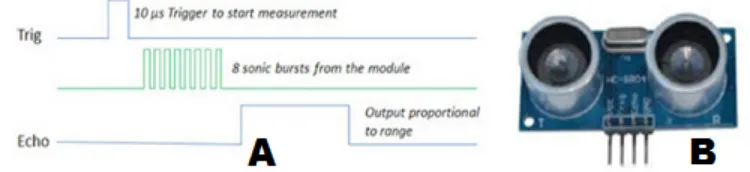
3.2 Sensor Ultrasonik HC-SR04
Sensor HC-SR04 adalah sensor pengukur jarak berbasis gelombang ultrasonik. Prinsip kerja sensor ini mirip dengan radar ultrasonik. Gelombang ultrasonik di pancarkan kemudian di terima balik oleh receiver ultrasonik. Jarak antara waktu pancar dan waktu terima adalah representasi dari jarak objek. Sensor ini cocok untuk aplikasi elektronik yang memerlukan deteksi jarak termasuk untuk sensor pada robot. Sensor HC-SR04 adalah versi low cost dari sensor ultrasonic PING buatan parallax.
Spesifikasinya :
1. Jangkauan deteksi: 2cm sampai kisaran 400-500cm.
2. Sudut deteksi terbaik adalah 15 derajat.
3. Tegangan kerja 5V DC.
4. Resolusi 1cm.
5. Frekuensi Ultrasonik 40 kHz.
Gambar 3.2 Sistem pewaktu (A) dan sensor ultrasonik HC-SRO4 (B) (http://hire.elangsakti.com)
3.3 Motor Servo DC
Motor servo adalah sebuah perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo), sehingga dapat di set-up atau di atur untuk menentukan dan memastikan posisi sudut dari poros output motor. motor servo merupakan perangkat yang terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan potensiometer. Serangkaian gear yang melekat pada poros motor DC akan memperlambat putaran poros dan meningkatkan torsi motor servo, sedangkan potensiometer dengan perubahan resistansinya saat motor berputar berfungsi sebagai penentu batas posisi putaran poros motor servo.
Gambar 3.3 Motor servo DC. (http://komponenelektronika)
3.3.1 Prinsip kerja motor servo
Gambar 3.4 Prinsip kerja motor servo DC.
Ketika lebar pulsa kendali telah diberikan, maka poros motor servo akan bergerak atau berputar ke posisi yang telah diperintahkan, dan berhenti pada posisi tersebut dan akan tetap bertahan pada posisi tersebut. Jika ada kekuatan eksternal yang mencoba memutar atau mengubah posisi tersebut, maka motor servo akan mencoba menahan atau melawan dengan besarnya kekuatan torsi yang dimilikinya (rating torsi servo). Namun motor servo tidak akan mempertahankan posisinya untuk selamanya, sinyal lebar pulsa kendali harus diulang setiap 20 ms (mili detik) untuk menginstruksikan agar posisi poros motor servo tetap bertahan pada posisinya.
3.4 Joystik PS2 Wireless
Joystick mulai dikenal pada abad 20-an pada waktu itu nama joystick diartikan tongkat pengendali pesawat terbang. Joystick Wireless PS2 terdiri dari dua modul, yaitu modul transmitter dan modul receiver. Modul transmitter berfungsi sebagai data input dan mengirim data input tersebut ke modul receiver. Sedangkan modul receiver berfungsi
Gambar 3.5 Connector PS2 controller
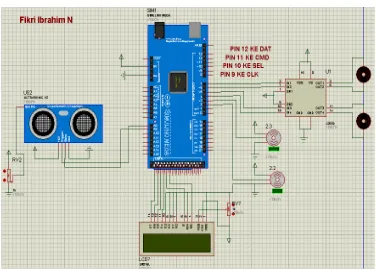
Pada penjelasan pin-pin dari joystick PS2 diketahui bahwa untuk melakukan hubungan anatar joystick PS2 dan mikrokontroler arduino dibutuhkan 3 jalur utama yaitu pin 1 Data dihubungkan ke mikrokontroler pin digital 12, pin 2 Command dihubungan ke mikrokontroler pin digital 11 dan pin 7 Clock dihubungkan ke mikrokontroler pin digital 9.
Dari ketiga pin tersebut penjelasannya sebagai berikut :
1. MISO (data) : Master Output Slave Input artinya jika dikonfigurasikan sebagai master maka pin MOSI sebagi output tetapi jika dikonfigurasikan sebagi slave maka pin MOSI sebgai input.
2. MOSI (Command) : Master Input Slave Output artinya jika dikonfigurasikan sebagai master maka pin MOSI sebagai input tetapi jika dikonfigurasikan sebagai slave maka pin MOSI sebagai output.
3. CLK : Clock jika dikonfigurasikan sebagai master maka pin CLK berlaku sebagai output tetapi jika dikonfigurasikan sebagai slave maka pin CLK berlaku sebagai input.
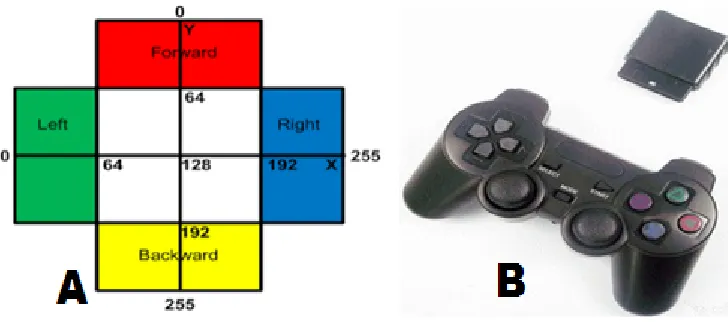
Gambar 3.6 Range koordinat (A). Joystick wireles PS2 (B). (http://komponenelektronika)
Pada gambar diatas merupakan cara kerja dari analog stick yang terdiri dari 2 sumbu X dan Y pada sumbu Y terdapat nilai minimum 0, 128 sebagai nilai tengah dan 255 sebagai nilai maksimal sehingga apabila dalam posisi netral maka stick analog bernilai 128, 128 yang mana penerapannya pada motor robot yang akan kita buat pada posisi ini robot akan diam ( tidak bergerak ) sedangkan untuk membuat motor maju maka koordinat X < dari 128 dan untuk bergerak mundur nilai koordinat X > dari 128 sedang untuk bergerak ke kiri maka nilai koordinat Y < 128 dan untuk berbelok kekanan nilai koordinat Y > dari 128. Untuk pengiriman dan penerimaan, maka dibutuhkan receiver dan transmitter josystick, dimana transmitter joystick digunakan untuk pengiriman data perintah dan diterima oleh receiver joystick.
BAB IV
Sensor Ultrasonik HC-SR04 Selain Tombol O
Communication Joystick dan
Gambar 4.1 Diagram Alir Penelitian 4.2 Alat dan Bahan
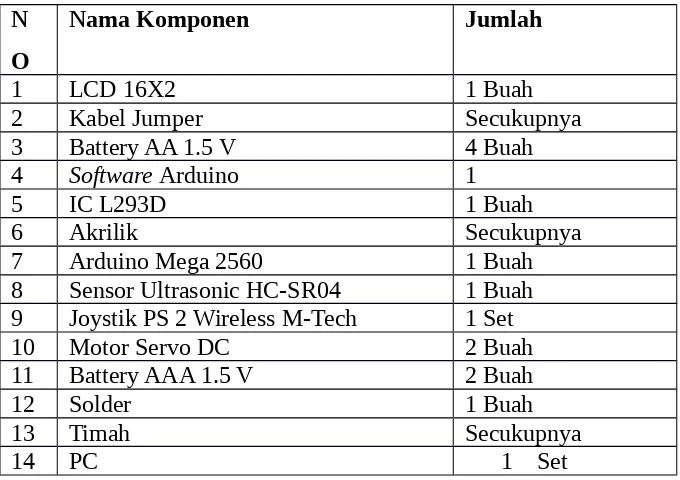
Tabel 4.1 Alat dan Bahan Robot Joystick Wireless PS2 N
O
Nama Komponen Jumlah
1 LCD 16X2 1 Buah
2 Kabel Jumper Secukupnya
3 Battery AA 1.5 V 4 Buah
4 Software Arduino 1
5 IC L293D 1 Buah
6 Akrilik Secukupnya
7 Arduino Mega 2560 1 Buah
8 Sensor Ultrasonic HC-SR04 1 Buah 9 Joystik PS 2 Wireless M-Tech 1 Set
10 Motor Servo DC 2 Buah
11 Battery AAA 1.5 V 2 Buah
12 Solder 1 Buah
13 Timah Secukupnya
14 PC 1 Set
4.3 Prosedur Penelitian
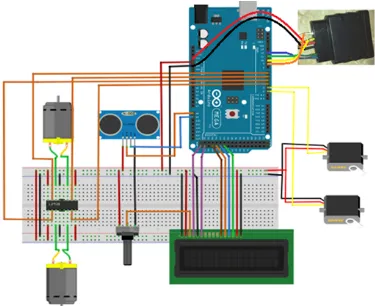
Robot ini bekerja dengan menggunakan fungsi joystick wireless PS2 sebagai system kontrol robot. Saat komunikasi antara joystick dan arduino terhubung, maka sepenuhnya robot dikendalikan dengan setiap tombol yang ada pada joystick. Dimana system kendali ini terdiri dari dua bagian yaitu kendali control manual dengan joystick dan kendali otomatis dengan joystick dan sensor ultrasonic HC-SR04. System kendali otomatis ini bekerja dengan pengiriman perintah dari tombol tertentu pada joystick ke arduino, dalam arduino semua perintah akan diproses dan akan ditentukan dieksekusi atau tidaknya. Dalam hal ini arduino mengirimkan berupa sinyal high pada pin yang terhubung ke sensor HC-SR04 dan dari sensor dikirim kembali ke arduino untuk diproses ulang berupa nilai jarak sensor ke penghalang.
A. Desain Mekanik Mobile Robot
Gambar (4.2 dan 4.3) diatas menunjukan bahwa robot mobile ini dikendalikan oleh dua system control yaitu jostik ps 2 wireless dan sensor ultrasonic HC-SR04. Dimana kedua sitem kendali sebagi input dan outputnya berupa motor servo DC, motor DC, dan LCD 16x2. Adapun arduino mega 2560 difungsikan sebagai inti dari robot yaitu sebagai otak dan photensiometer sebagi pengatur tingkat kecerahan LCD. Sedangkan IC L293D sebagai motor driver motor DC robot yang dapat mengatur kecepatan dan arah putar motor.
B. Pembuatan Perangkat Lunak
Gambar 4.3 Desain robot pada software Proteus 7.8
C. Penentuan Ketepatan Sistem Control Joystick Wireless PS2
Joystik wireless PS2 teridiri dari 2 komunikasi control, yaitu komunikasi tombol digital, dan komunikasi tombol analog, kedua komunikasi ini memiliki type pembacaan yang berbeda. Pada control digital semua tombol bernilai 0 sedangkan tombol analog berupa besar koordinat X dan Y dengan besar 0 sampai 255 seperti pada (gambar 1.5).
maka penjelasan pada gambar dapat diterjemahkan kedalam koordinat dan angka yang kurang lebihnya seperti ini :
1. Untuk maju : Y < 64 dan X di antara 64 dan 192 2. Untuk mundur : Y > 192 dan X di antara 64 dan 192 3. Untuk kanan : X > 192 dan Y di antara 64 dan 192 4. Untuk kiri : X < 64 dan Y di antara 64 dan 192
4.3.2 Penerapan Program Mode Kontrol dan Otomatis
BAB V
HASIL DAN PEMBAHASAN
Hasil dan pembahasan pada bab ini lebih difokuskan pada penjelasan dari hasil analisis sistem yang dirancang dan data yang dihasilkan. Dari hasil penelitian didapat data yang menjadi parameter keberasilan alat yang dirancang. Berdasarkan data yang diperoleh dihasilkan kualitas dari rancang bangun mobile robot. Analisis data yang dilakukan pada penelitian ini meliputi karakteristik dari joystick wireless PS2, karakteristik dari sensor jarak ultrasonic HC-SR04, dan perbandingan nilai harga robot avoider, robot joystick wireless PS2 dengan robot mobile avoider menggunakan kontrol joystick wireless PS2.
5.1 Karakteristik Joystick Wireless PS2 Pada Robot
Komunikasi joystick wireless PS2 memanfaatkan teknologi komunikasi wireless dengan frekuensi sinyal radio ISM 2.4 GHz untuk menghubungkan perangkat transmitter joystick ke perangkat penerima atau receiver joystick yang relatif pendek. Komunikasi joystick wireless PS2 hanya dapat mengirim dan menerima data dengan range jarak komunikasi 2 cm sampai 12 meter. 5.1.1 Fungsi pin receiver joystick pada robot :
1. Data, pin ini berfungsi untuk mengirim data dari jostik ke mikrokontroler, data dikirim dengan bentuk serial sinkron 8 bit fallin edge.
2. Command, pin ini berfungsi untuk mengirim data dari mikrokontroler ke joystick, data yang di kirim berbentuk serial sinkron 8 bit fallin edge.
3. Attention, adalah pin yang digunakan untuk memilih josystick mana yang aktif (select). 4. Clock, berfungsi untuk sinkronisasi pengiriman dan penerimaan data antara
mikrokontroler dan joysick. Sinyaal clock dibangkitkan oleh mikrokontroler.
5. Acknolwedge adalah sinyal yang dikirim oleh joystick apabila telah menerima data dari mikrokontroler, ACK akan berlogika low kira-kira satu siklus clock pada saat data 8 bit telah terkirim, yang dalam hal ini disambungan pada vcc dengan supplay 5 volt pada joystick M-Tech dan ke ground pada joystick Sony.
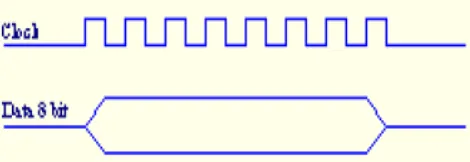
Semua transmisi data antara mikrokontroller dan joystick adalah 8 bit serial sinkron falling edge ( data masuk pada saat clock berubah dari tinggi ke rendah ). Berikut ini adalah Timing diagram pengiriman 1 byte data.
Gambar 5.1Pengiriman 1 byte data secara serial sinkron (www.delta-electronic.com)
Gambar 5.2 Timing diagram pengambilan data (www.delta-electronic.com)
Tabel 5.1 Pengujian komunikasi Transmitter dan Receiver Joystick wireless PS2 Pengujia
n
Jarak (Meter) Dengan Penghalang Tanpa Penghalang
1 0.5 Ya Ya
2 1 Ya Ya
3 2 Ya Ya
4 3 Ya Ya
5 4 Ya Ya
6 5 Ya Ya
7 6 Ya Ya
8 7 Ya Ya
9 7.5 Ya Ya
10 8 Tidak Ya
11 8.5 Tidak Ya
12 9 Tidak Tidak
13 10 Tidak Tidak
Tabel 5.2 Pertukaran data untuk tombol joystick digital Byte PsxCmd PsxData
Keterangan
01 0x01
-02 0x42 0x41
6 5 4 2 1
Tabel 5.3 Pertukaran data untuk tombol joystick analog Byt
Joystick Analog Kanan - Sumbu Y 0x00 - atas, 0xff – bawah
8
-Data Analog 3
Joystick Analog Kiri - Sumbu X 0x00 - kiri, 0xff – kanan
9
-Data Analog 4
5.2 Karakteristik Sensor Ultrasonic HC-SR04 Pada Robot
Secara umum, alat ini akan menembakkan gelombang ultrasonik menuju suatu area atau suatu target. Setelah gelombang menyentuh permukaan target, maka target akan memantulkan kembali gelombang tersebut. Gelombang pantulan dari target akan ditangkap oleh sensor, kemudian sensor menghitung selisih antara waktu pengiriman gelombang dan waktu gelombang pantul diterima.
Gambar 5.3 Prinsip kerja sensor ultrasonic HC-SR04 (http://hire.elangsakti.com)
Gambar 5.4 Pengujian sensor Ultrasonic HC-SR04 jarak terhadap objek
Berdasarkan grafik pengujian diatas, sensor ultrasonic HC-SR04 memiliki jarak jangkauan akurat deteksi objek sampai 385 cm, dan berdasar nilai koefisien determinasi (KD) yang bernilai 1 dengan nilai koefisien korelasinya 1 mendefiniskan bahwa data pengujian sangat baik.
5.3 Perbandingan Rancang Bangun Mobile Robot
BAB VI
KESIMPULAN DAN SARAN
6.1 Kesimpulan
Melalui penelitian ini maka dapat disimpulkan bahwa untuk pembuatan robot joystick wireless PS2 memerlukan 4 pin penting yang harus berkomunikasi dengan mikrokontroler arduino yaitu pin Data, pin Command, pin Select dan pin Acknolwedge, dimana setiap merk joystick memiliki fungsi kerja yang berbeda pada pin Acknolwedge, misalnya pada joystick merk Sony pin ini harus tersambung ke Ground. Sedangkan pada joystick M-Tech yang dipakai pin Acknolwedge harus tersambung ke Vcc 5 volt pada arduino.
Untuk memfungsikan sensor ultrasonic HC-SR04 sebagai mode otomatis robot joystick wireless PS2 cukup dengan memasukan program robot avoider kedalam fungsi dari if dan else if pada program joystick wireless PS2. Dengan memfungsikan dua system control pada satu robot dapat memperkecil nilai pengeluaran biaya dan menjadikan rancang bangun robot ini dilakukan serta dibuat seefektif dan seefesien mungkin.
6.2 Saran
DAFTAR PUSTAKA
Nanang Setya,2015. Mikrokontroler dan joytsick. diakses pada (www.delta-electronic.com) [ CITATION Nan15 \l 1033 ]
Durfee, W. (2011). Arduino Microcontroller Guide, 1–27.
Fraden, J. (2010). Handbook of Modern Sensors: Physics, Designs, and Applications, 2nd ed. American Journal of Physics.
Cara kerja joystick wireless PS2. 2015 (http://komponenelektronika.com)
Kilian. 2008. Modern Control Technology:Components and Systems 2nd Edition. Perth, WA: Australia.
Andrianto, Heri. 2008. Pemrograman Mikrokontroler AVR ATmega16 menggunakan Bahasa C CodeVision AVR. Bandung : Informatika.
Cara Kerja Sensor Ultrasonik, Rangkaian, & Aplikasinya - Elang Sakti.html. 2015 diakses pada http://hire.elangsakti.com/2015/02[ CITATION Ela16 \l 1033 ]
Endra, P. (2006). Disain, control, dan Kecerdasan Buatan XE "Kecerdasan, buatan" . Yogyakarta: Andi Yogyakarta.
Supriyanto, Raden, dkk. 2010. Buku Ajar Robotika. Fakultas Ilmu Komputer, Universitas Gunadarma.