Informasi Dokumen
- Sekolah: universitas
- Mata Pelajaran: rekayasa sipil
- Topik: Solusi Sistem Persamaan Lanjar
- Tipe: makalah
Ringkasan Dokumen
I. Relevansi Solusi Sistem Persamaan Linier dengan Tujuan Pendidikan
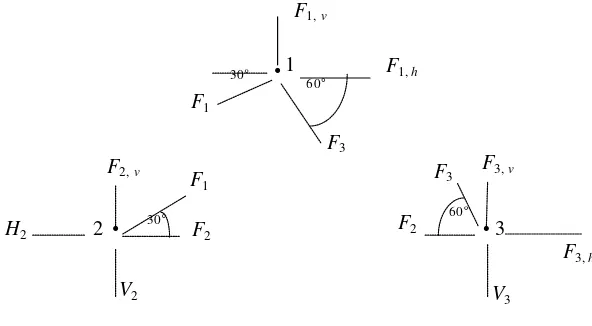
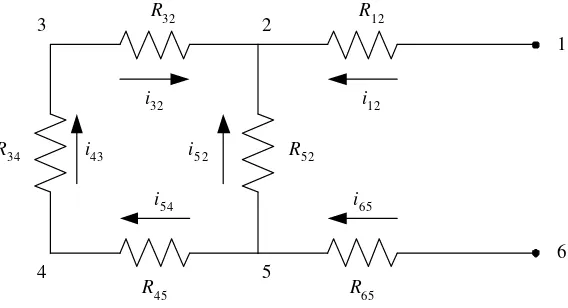
Bab 4, "Solusi Sistem Persamaan Linier", sangat relevan dengan tujuan pendidikan tinggi di bidang teknik dan sains. Pemahaman akan metode numerik untuk menyelesaikan sistem persamaan linier (SPL) merupakan keterampilan esensial bagi mahasiswa untuk mampu memodelkan dan menganalisis berbagai fenomena. Kemampuan ini krusial dalam berbagai aplikasi, mulai dari perancangan struktur (seperti contoh rangka statis segitiga yang dibahas), analisis rangkaian listrik, hingga pemodelan sistem dinamis. Modul ini tidak hanya mengajarkan prosedur penyelesaian, tetapi juga menekankan pemahaman konseptual di balik setiap metode, serta implikasi praktisnya dalam konteks kesalahan pembulatan dan kondisi matriks.
1.1 Tujuan Pembelajaran
Tujuan pembelajaran bab ini mencakup kemampuan mahasiswa untuk memahami berbagai metode penyelesaian SPL, meliputi eliminasi Gauss, eliminasi Gauss-Jordan, metode matriks invers, dekomposisi LU, dan metode iteratif Jacobi serta Gauss-Seidel. Mahasiswa juga diharapkan mampu memilih metode yang tepat sesuai dengan karakteristik SPL yang dihadapi, termasuk mempertimbangkan efisiensi komputasi dan potensi kesalahan numerik. Pentingnya pemahaman konsep determinan dan kondisi matriks juga ditekankan untuk memastikan interpretasi hasil yang akurat dan valid.
1.2 Hasil Belajar yang Diharapkan
Setelah mempelajari bab ini, mahasiswa diharapkan mampu menyelesaikan SPL menggunakan berbagai metode yang telah dipelajari secara manual dan dengan bantuan perangkat lunak. Mereka juga diharapkan mampu menganalisis hasil perhitungan, mengidentifikasi potensi kesalahan numerik, dan menafsirkan implikasi dari kondisi matriks terhadap solusi yang diperoleh. Kemampuan ini dilatih melalui contoh-contoh soal terapan dalam berbagai disiplin ilmu, memastikan relevansi materi dengan konteks praktik profesional.
II. Topik, Teori, dan Prinsip Utama
Bab ini membahas berbagai metode numerik untuk menyelesaikan SPL, dimulai dari metode eliminasi Gauss sebagai landasan. Metode ini dijelaskan secara rinci, termasuk variasi seperti eliminasi Gauss-Jordan dan implementasinya dengan strategi pivoting untuk meminimalisir kesalahan pembulatan. Konsep dekomposisi LU dijelaskan sebagai alternatif efisien, khususnya untuk menyelesaikan beberapa SPL dengan matriks koefisien yang sama tetapi vektor konstanta yang berbeda. Selain metode langsung, bab ini juga memperkenalkan metode iteratif Jacobi dan Gauss-Seidel. Teori determinan dan kaitannya dengan keberadaan solusi serta kondisi matriks turut dijelaskan.
2.1 Metode Eliminasi Gauss dan Variasinya
Metode eliminasi Gauss merupakan inti dari bab ini, dengan penjelasan detail tentang proses eliminasi, substitusi mundur, dan pentingnya strategi pivoting (parsial dan lengkap) untuk menangani kasus-kasus singularitas atau kondisi matriks yang buruk. Contoh-contoh numerik dengan berbagai kasus (termasuk kasus dengan kondisi buruk) diberikan untuk memperkuat pemahaman mahasiswa. Diilustrasikan bagaimana metode Gauss-Jordan merupakan variasi dari metode Gauss, dan bagaimana keduanya digunakan untuk menghitung invers matriks.
2.2 Metode Dekomposisi LU
Dekomposisi LU dijelaskan sebagai teknik alternatif untuk menyelesaikan SPL. Metode ini didasarkan pada pemfaktoran matriks koefisien menjadi perkalian dua matriks segitiga, yaitu matriks segitiga bawah (L) dan matriks segitiga atas (U). Dua metode pemfaktoran dibahas: Metode LU Gauss dan metode reduksi Crout. Keunggulan metode dekomposisi LU dalam efisiensi komputasi, terutama ketika menyelesaikan beberapa SPL dengan matriks koefisien yang sama, dijelaskan dengan detail. Ilustrasi algoritma dan contoh soal numerik disertakan.
2.3 Metode Matriks Invers dan Determinan
Bab ini juga membahas metode penyelesaian SPL menggunakan invers matriks, yang merupakan konsep penting dalam aljabar linier. Proses perhitungan invers matriks dengan metode eliminasi Gauss-Jordan dijelaskan secara rinci. Konsep determinan dibahas sebagai syarat keberadaan invers matriks dan kaitannya dengan kondisi matriks. Contoh-contoh numerik dan interpretasi hasil perhitungan disertakan. Pembahasan juga menyoroti keterbatasan metode ini, terutama dalam hal efisiensi komputasi untuk SPL dengan ukuran besar.
2.4 Metode Iteratif dan Kondisi Matriks
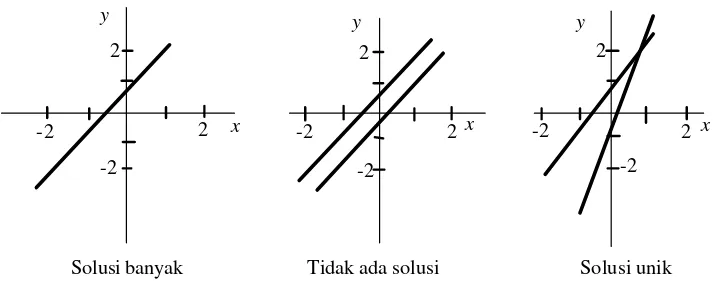
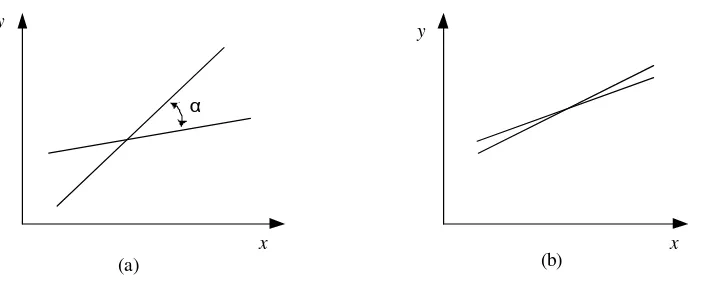
Selain metode langsung, bab ini juga secara singkat memperkenalkan metode iteratif Jacobi dan Gauss-Seidel sebagai alternatif penyelesaian SPL, terutama untuk sistem dengan matriks koefisien berukuran besar. Konsep kondisi matriks dijelaskan sebagai faktor penting dalam menentukan akurasi solusi numerik. Penjelasan tentang kondisi matriks yang buruk dan implikasinya terhadap hasil perhitungan disertakan, termasuk ilustrasi grafis untuk SPL berukuran 2x2. Contoh kasus yang menunjukkan dampak kondisi matriks terhadap akurasi solusi numerik juga dibahas.
Referensi Dokumen
- MAT92
- CHA91