BAB 2
TINJAUAN PUSTAKA
2.1 Lengan robot
Lengan Robot adalah sebuah alat mekanik yang dapat melakukan tugas –
tugas fisik yang berat, sehingga sangat menbantu pekerjaan manusia dalam
melakukan hal – hal yang sangat berat untuk dikerjakan, dan sangat menghemat
waktu untuk mengerjakan pekerjaan yang berat. Bukan hanya itu Robot juga
dapat bekerja pada daerah – daerah yang berbahaya yang tidak diperbolehkan
manusia untuk memasuki daerah tersebut.
2.2 Klasifikasi Umum Robot
Klasifikasi robot belum ada yang baku, tetapi berdasarkan beberapa
sumber refrensi, robot dapat diklasifikasikan berdasarkan penggunaan aktuator,
berdasarkan kebutuhan akan operator robot, dan berdasarkan kegunaannya.
Penjelasan lebih detailnya sebagai berikut:
2.2.1 Klasifikasi Robot Berdasarkan Penggunaan Aktuator
Klasifikasi robot berdasarkan penggunaan aktuatornya yaitu manipulator dan
mobile robot. Penjelasan lebih detail tentang manipulator dan mobile robot sebagai berikut:
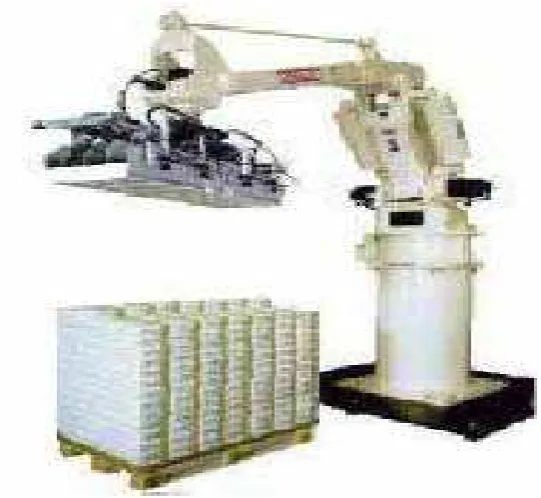
2.2.1.1 Manipulator
Pada robot industri, manipulator merupakan sebuah rangkaian benda kaku
(rigid bodies) terbuka yang terdiri atas sendi (joint) dan terhubung dengan lengan
(link) dimana setiap posisi sendi ditentukan dengan variabel tunggal sehingga
jumlah sendi sama dengan nilai derajat kebebasan (degree of freedom).
Manipulator yang sering dipakai sebagai robot industri pada dasarnya terdiri atas
struktur mekanik, penggerak (aktuator), sensor dan sistem kontrol. Dasar (base)
manipulator sering disebut kerangka dasar (base frame) dan ujung dari
manipulator biasanya dilengkapi dengan end efector yang salah satu jenisnya
Gambar 2.1.
Pada manipulator terdapat sendi (joint) yang merupakan tempat
sambungan lengan untuk melakukan putaran atau gerakan. Secara umum jenis
sendi yang digunakan pada manipulator adalah sendi putar (revolute joint). Sendi
putar sering digunakan sebagai pinggang (waist), bahu (shoulder) dan siku
(elbow), dan pergerakan sendi putar akan menghasilkan satu derajat kebebasan.
Gambar 2.1 Manipulator robot
Bagian dasar manipulator bisa kaku terpasang pada lantai area kerja
ataupun terpasang pada rel. Rel berfungsi sebagai path atau alur sehingga
memungkinkan robot untuk bergerak dari satu lokasi ke lokasi lainnya dalam satu
area kerja. Bagian tambahan merupakan perluasan dari bagian dasar, bisa disebut
juga lengan atau arm. Bagian ujungnya terpasang pada end efektor yang berfungsi
untuk mengambil atau mencekam material. Manipulator digerakkan oleh aktuator
atau disebut sistem drive yang menyebabkan gerakan yang bervariasi dari
2.2.1.2 Mobile robot
Mobile robot merupakan sebuah robot yang dapat bergerak dengan leluasa karena memiliki alat gerak untuk berpindah posisi. Secara umum dan mendasar
sebuah mobile robot dibedakan oleh locomotion system atau sistem penggerak.
Locomotion merupakan gerakan melintasi permukaan datar. Semua ini disesuaikan dengan medan yang akan dilalui dan juga oleh tugas yang diberikan
kepada robot. Berikut adalah klasifikasi robot menurut jenis locomotion.
a. Robot Beroda (wheeled car)
Robot yang seringkali dijumpai adalah robot yang bergerak dengan
menggunakan roda. Roda merupakan teknik tertua, paling mudah, dan paling
efisien untuk menggerakkan robot melintasi permukaan datar. Roda seringkali
dipilih, karena memberikan traction yang bagus, mudah diperoleh dan dipakai,
dan juga mudah untuk memasangnya pada robot. Traction merupakan variabel
dari material roda dan permukaan yang dilintasi oleh roda. Material roda yang
lebih lembut memiliki koefisien traction yang besar, dan koefisien traction yang
besar ini member gesekan (friction) yang besar pula, dan memperbesar daya yang
dibutuhkan untuk menggerakkan motor. Jumlah roda yang digunakan pada robot
beragam, dan dipilih sesuai selera si pembuat robot. Robot dapat dibangun dengan
menggunakan berbagai macam roda, misalnya beroda dua, beroda empat, beroda
enam, atau beroda caterpillar (tank-treaded) yang dapat dilihat pada Gambar 2.2
(a) (b)
2.3. Klasifikasi Robot Berdasarkan Kebutuhan Akan Operator Robot
Klasifikasi robot berdasaarkan kebutuhan akan operator robot ada tiga
jenis yaitu Autonomous robot, teleoperetad robot dan semi autonomous.
Penjelasan tentang masing-masing jenis robot tersebut sebagai berikut.
2.3.1 Autonomous Robot
Robot Autonomous adalah robot yang dapat melakukan tugas-tugas yang
diinginkan dalam lingkungan yang tidak terstruktur tanpa bimbingan manusia
terus menerus berdasarkan logika-logika yang diberikan manusia kepada robot.
Banyak jenis robot memiliki beberapa tingkat otonomi. Tingkatan otonomi sangat
diinginkan dalam bidang-bidang seperti eksplorasi ruang angkasa, membersihkan
lantai, memotong rumput, dan pengolahan air limbah. Salah satu contoh
autonomous robot dapat dilihat pada Gambar 2.3.
Gambar 2.3 Autonomous robot
2.3.2 Teleoperetad Robot
Robot ini dalam pengoperasian mesinnya dikendalikan dari kejauhan. Hal
ini mirip dalam arti untuk frase "remote control", dikendalikan oleh operator
(manusia) dengan menggunakan remote control. Pada Gambar 2.4 terlihat
Gambar 2.4 caterpillar robot dan remote control
2.4 Klasifikasi Robot Berdasarkan Kegunaan
Klasifikasi robot berdasarkan kegunaan yaitu robot industry (industrial
robot) Penjelasan jenis robot industry.
2.4.1 Robot Industri (Industrial Robot)
Robot industri merupakan robot yang digunakan di dunia industri. Robot
industri ini digunakan untuk otomatisasi proses produksi, misalnya untuk proses
pengelasan (welding), perakitan dan pengepakan sesuatu barang. Pada Gambar 2.5
adalah robot industri yang digunakan dalam proses pengelasan.
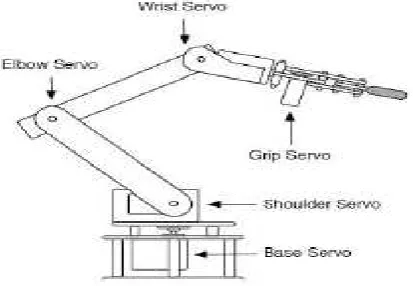
2.5 Struktur Umum Robot
Secara umum struktur robot memiliki badan (body), lengan (arm),
pergelangan (wrist), ujung (end effector), penggerak (actuator), sensor,
pengendali (controller) dan catu daya (power supply). Penjelasan lebih detail
tentang struktur umum robot sebagai berikut.
2.5.1 Lengan (arm)
Lengan robot merupakan komponen robot yang memiliki fungsi untuk
melakukan pergerakan robot. Gambar 2.6 adalah lengan robot (arm robot) dan
lengan pada humanoid robot.
Gambar 2.6 Lengan robot
2.5.2 Pergelangan (wrist)
Pergelangan pada robot berfungsi untuk menghubungkan lengan robot
dengan end effector. Gambar 2.7 menunjukan pergelangan (wirst) pada arm robot.
2.5.3 Ujung (end effector)
End effector berfungsi sebagai bagian terakhir yang menghubungkan antara manipulator dengan objek yang akan dijadikan kerja dari robot. End
effector jika disamakan dengan manusia seperti jari-jari tangan yang dapat digerakkan untuk memindah atau mengangkat material ataupun peralatan yang
dapat digunakan untuk mengelas, mengecat, menempa, mengisi botol dan
lain-lain sesuai dengan kebutuhan. Bentuk efektor banyak memiliki banyak jenis, salah
satunya adalah gripper. Gambar 2.8 menunjukan end effector pada arm robot dan
humanoid robot.
Gambar 2.8 End effector arm robot
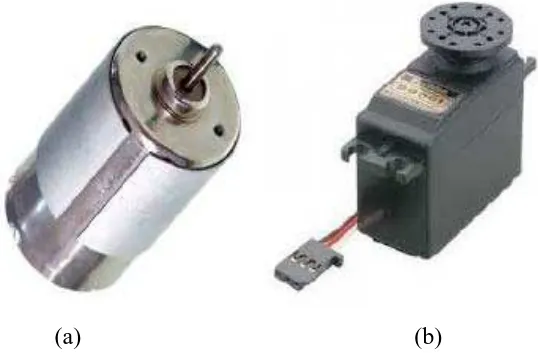
2.6 Motor Penggerak 2.6.1 Pengertian Motor
Motor adalah sebuah motor elektris bertenaga AC (Alternating Current) atau DC
(Direct Current), yang berperan sebagai bagian pelaksana dari perintah-perintah
yang diberikan oleh otak robot. Adapun motor untuk penggerak pada robot
digunakan motor Servo dan motor DC (Direct Current), dengan penjelasan
sebagai berikut; motor DC untuk aplikasi yang membutuhkan kecepatan tinggi
dan motor servo untuk gerakan-gerakan berupa gerakan sudut. Pada Gambar 2.9
(a) (b)
Gambar 2.9 (a) motor DC, (b) motor servo
Dalam mengendalikan motor-motor tersebut, otak robot tidak dapat
langsung mengakses motor, kecuali motor servo yang sudah memiliki antarmuka.
Namun demikian, dengan menggunakan antarmuka servo controller, maka proses
pengendalian motor servo akan lebih mudah dilakukan.
2.6.1.1Motor DC
Motor DC adalah motor listrik yang memerlukan suplai tegangan arus
searah pada kumparan medan untuk diubah menjadi energi gerak mekanik. Motor
arus searah, sebagaimana namanya, menggunakan arus langsung. Dalam
perancangan ini motor DC berfungsi sebagai penggerak roda dengan arah putaran
sesuai dengan arah jarum jam dan juga berlawanan arah jarum jam sesuai dari
masukan driver motor DC yang telah di kendalikan oleh mikrokontroler. Pada
Gambar 2.10 menunjukkan bentuk dari motor DC yang di gunakan dalam
perancangan ini.
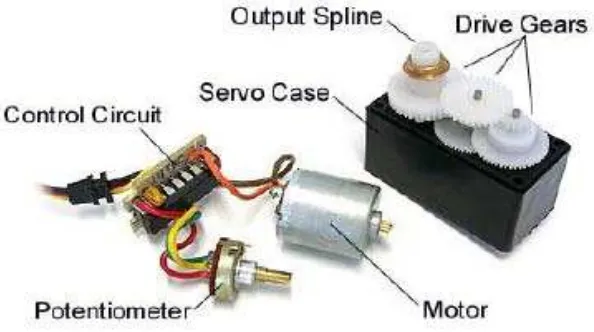
2.6.1.2 Motor Servo (Servomotor)
Servomotor adalah sebuah motor dengan sistem closed feedback di mana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di
dalam servomotor. Motor ini terdiri dari sebuah motor, serangkaian gear,
potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan
batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur
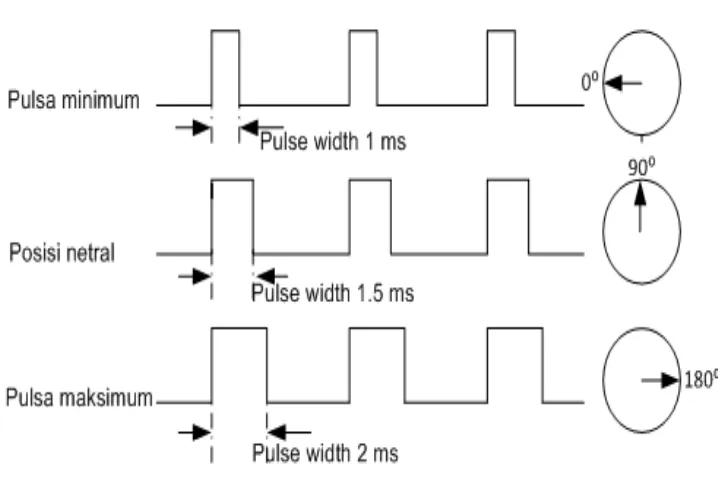
berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor.
Tampak pada gambar dengan pulsa 1,5 ms pada periode selebar 2 ms maka sudut
dari sumbu motor akan berada pada posisi tengah. Semakin lebar pulsa OFF maka
akan semakin besar gerakan sumbu ke arah jarum jam dan semakin kecil pulsa
OFF maka akan semakin besar gerakan sumbu ke arah yang berlawanan dengan
jarum jam.
Servomotor biasanya hanya bergerak mencapai sudut tertentu saja dan tidak kontinyu seperti motor DC maupun motor stepper. Walau demikian, untuk
beberapa keperluan tertentu, Servomotor dapat dimodifikasi agar bergerak
kontinyu. Pada robot, motor ini sering digunakan untuk bagian kaki, lengan atau
bagian-bagian lain yang mempunyai gerakan terbatas. Servomotor adalah motor
yang mampu bekerja dua arah, yaitu searah jarum jam cloackwise (CW) dan
berlawanan arah jarum jam countercloackwise (CCW) dimana arah dan sudut
pergerakan rotornya dapat dikendalikan hanya dengan memberikan pengaturan
duty cycle sinyal PWM (Pulse Width Modulation) pada bagian pin kontrolnya. Servomotor merupakan sebuah motor DC yang memiliki rangkaian kontrol elektronik dan internal gear untuk mengendalikan pergerakan dan sudut
angularnya. Sistem mekanik pada servomotor, seperti yang ditunjukan pada
Gambar 2.11 memiliki :
a. 3 jalur kabel : power, ground, dan control
b. Sinyal kontrol mengendalikan posisi
c. Operasional dari servomotor dikendalikan oleh sebuah pulsa selebar ±
20 ms, dimana lebar pulsa antara 0,5 ms dan 2 ms menyatakan akhir
dari range sudut maksimum.
d. Konstruksi didalamnya meliputi internal gear, potensiometer, dan
Gambar 2.11 Sistem mekanik servomotor
Jenis-jenis servomotor diantaranya adalah sebagai berikut:
a. Servo motor Standar 180°
Servomotor jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut
dari kanan – tengah – kiri adalah 180°.
b. Servo motor Continuous
Servomotor jenis ini mampu bergerak dua arah (CW dan CCW) tanpa batasan defleksi sudut putar (dapat berputar secara kontinyu). Adapun Prinsip
kerja Motor Servo ialah sebagai berikut:
Servo motor dikendalikan dengan memberikan sinyal modulasi lebar pulsa
(Pulse Wide Modulation /PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol
yang diberikan akan menentukan posisi sudut putaran dari poros servo motor.
Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros
servo motor ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros servo
Gambar 2.12 Timing Diagram Pengendalian Servo Motor
Ketika lebar pulsa kendali telah diberikan, maka poros servo motor akan
bergerak atau berputar ke posisi yang telah diperintahkan, dan berhenti pada
posisi tersebut dan akan tetap bertahan pada posisi tersebut. Jika ada kekuatan
eksternal yang mencoba memutar atau mengubah posisi tersebut, maka servo
motor akan mencoba menahan atau melawan dengan besarnya kekuatan torsi yang
dimilikinya (rating torsi servo). Namun servo motor tidak akan mempertahankan
posisinya untuk selamanya, sinyal lebar pulsa kendali harus diulang setiap 20 ms
untuk menginstruksikan agar posisi poros servo motor tetap bertahan pada
posisinya.
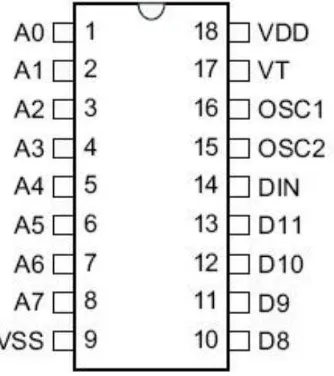
2.7 Encoder HT12E
HT12E adalah hardware yang memiliki fungsi sebagai encoder. IC HT12E
disini digunakan sebagai encoder yang terhubung dengan transmitter TLP433
yang berfungsi untuk mengubah addres dan data paralel ke data serial. IC HT12E
memiliki 8-address dan 4-address/data input. Data input yang berupa 4 buah data
biner yang akan dikodekan menjadi data serial sehingga data dapat ditransmisikan oleh transmitter TLP433. Pada Gambar 2.13 menunjukan kofigurasi pin pada
Gambar 2.13 Konfigurasi Pin Pada HT12E
2.8 Decoder HT12D
HT12D adalah hardware yang memiliki fungsi sebagai decoder. IC
HT12D disini digunakan sebagai decoder yang terhubung dengan reccieverd RLP
433 yang berfungsi untuk mengubah addres dan data serial ke data paralel. Data
yang di terima oleh RLP433 yang secara serial akan dikodekan menjadi bentuk
biner 4-bit output. Pada Gambar 2.14 adalah menunjukan kofigurasi pin pada
IC HT12D.
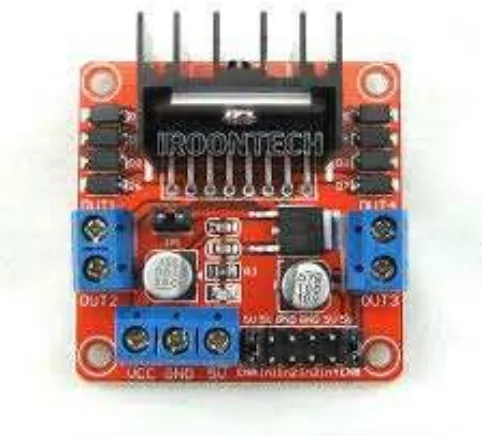
2.9 Modul Driver Motor DC
Rangkaian modul driver motor DC adalah rangkaian yang berfungsi untuk
mengendali motor DC yang menghasilkan keluaran putaran motor yang dapat
berputar searah jarum jam dan berlawanan arah jarum jam. Dalam modul ini
digunakan IC L298 yang berisi dua rangkaian H-Bridge. Gambar 2.15
menunjukkan bentuk dari modul driver motor DC.
Gambar 2.15 Modul Driver Motor DC
2.10 Driver /Receiver RS-232 MAX-232
Agar dapat komputer PC berkomunikasi dengan peralatan digital eksternal
berlevel TTL/CMOS melalui saluran RS-232 maka diperlukan rangkaian pengubah level
RS-232 ke level TTL/CMOS dan sebaliknya. Salah satu komponen yang berfungsi untuk
mengubah Level TTL ke RS-232 atau sebaliknya adalah IC MAX-232. IC MAX232
adalah sebuah chip dual Driver/Receiver standrad EIA-232 bersama kapasitor
charge/pump yang mengubah level TTL/CMOS ke level RS-232 dan sebaliknya.
Susunan pin chip MAX 232 ditunjukkan pada gambar 2.16.a dan diagram blok serta
Gambar 2.16 Susunan penyemat dan diagram blok chip MAX-232.
RS-232 adalah standard komunikasi serial antar periperal-periperal, biasa
juga disebut dengan jalur I/O ( input / output ),dalam sistem ini RS232 berfungsi
untuk mengirim data hasil pengukuran ke PC.
Karakteristik RS 232 adalah sebagai berikut:
1. Sebuah ‘spasi’ (logika 0) antara tegangan +3 s/d +25 volt.
2. Sebuah ‘tanda’ (logika 1) antara tegangan -3 s/d -25 volt.
3. Daerah tegangan antara +3 s/d -3 volt tidak didefenisikan.
4. Tegangan rangkaian terbuka tidak boleh lebih dari 25 volt (dengan
acuan ground).
Daerah tegangan antara -3 volt sampai + 3 volt tidak memiliki level logika
yang pasati sehingga harus dihindari. Sama halnya dengan level lebih dari negatif
-25 dan + 25 juga tidak memiliki level logika. RS232 memiliki dua charge–pump
internal yang berfungsi untuk mengkonversi tegangan +5V menjadi ±10V (tanpa
2.11 Port Komunikasi Serial
Komunikasi serial membutuhkan port sebagai saluran data. Berikut tampil
port serial DB9 yang umum digunakan sebagai port serial.
Gambar 2.17 Port DB9 jantan
Gambar 2.18 Port DB9 betina
Gambar 2.19 susunan PIN konektor DB9
Tabel 2.1 Fungsi Susunan Konektor DB9
Pin Nama Signal Fungsi
1 DCD Data Carrier Detect, sinyal yang menyatakan bahwa modem telah menerima sinyal carrier valid dari
2 RXD Sinyal data dari modem ke PC (Penerimaan). yang menyatkan bahwa modem siap mengirim atau
menerima data.
7 RTS Request To Send, sinyal kendali dari PC yang menandakan bahwa PC siap menerima data
8 CTS Clear To Send, sinyal kendali dari modem yang menandakan bahwa modem siap menerima data.
9 RI Ring Indicator, sinyal kendali ke PC, tanda bahwa saluran telepon berdering.
2.12 Mikrocontroller AT89S52
Penggunaan IC AT89S52 memiliki beberapa keuntungan dan keunggulan,
antara lain kemudahan dalam pemrograman dan hemat dari segi biaya. IC AT
89S52 memiliki program internal yang mudah untuk dihapus dan diprogram
kembali secara berulang – ulang. Pada suatu alat yang menggunakan IC AT
89S52 berfungsi sebagai sentral control dari segala aktivitas alat tersebut. Mulai
dari timer untuk mengontrol lamanya bekerja.
Tabel 2.2 Kapasitas Memori Mikrokontroler seri AT89XX
Type RAM Flash Memory EEPROM AT89C51/AT89S51 8 X 128 byte 4 Kbyte Tidak
AT89C52/AT89S52 8 X 256 byte 8 Kbyte Tidak
AT89C55 8 X 256 byte 20 Kbyte Tidak
AT89S53 8 X 256 byte 12 Kbyte Tidak
AT89S8252 8 X 256byte 8 Kbyte 2Kbyte
Mikrokontroler AT89S52 memiliki fasilitas-fasilitas pendukung yang
membuatnya menjadi mikrokontroler yang sangat banyak digunakan dalam
berbagai aplikasi. Fasilitas-fasilitas yang dimiliki oleh mikrokontroler AT89S52
adalah:
1. Sesuai dengan produk-produk MCS-51.
2. Terdapat memori flash yang terintegrasi dalam sistem. Dapat ditulis ulang
hingga 1000 kali
3. Beroperasi pada frekuensi 0 sampai 24MHz.
4. Tiga tingkat kunci memori program.
5. Memiliki 256 x 8 bit RAM internal.
6. Terdapat 32 jalur masukan/keluaran terprogram.
7. Tiga pewaktu atau pencacah 6-bit