PERANCANGAN SISTEM PENGHITUNG DAN PEMILAH BUAH OTOMATIS MENGGUNAKAN SENSOR LASER DIODA
DENGAN TAMPILAN PC
SKRIPSI
MUHAMMAD ARDIANSYAH MATONDANG 140801045
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
M E D A N 2018
PERANCANGAN SISTEM PENGHITUNG DAN PEMILAH BUAH OTOMATIS MENGGUNAKAN SENSOR LASER DIODA
DENGAN TAMPILAN PC
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
MUHAMMAD ARDIANSYAH MATONDANG 140801045
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2018
PERNYATAAN ORISINALITAS
PERANCANGAN SISTEM PENGHITUNG DAN PEMILAH BUAH OTOMATIS MENGGUNAKAN SENSOR LASER DIODA
DENGAN TAMPILAN PC
SKRIPSI
Saya menyatakan bahwa skripsi ini adalah hasil karya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Muhammad Ardiansyah Matondang 140801045
PERANCANGAN SISTEM PENGHITUNG DAN PEMILAH BUAH OTOMATIS MENGGUNAKAN SENSOR LASER DIODA
DENGAN TAMPILAN PC
ABSTRAK
Penelitian ini membahas tentang pembuatan rancang bangun alat pemilih barang dan penghitung jumlah barang yang bekerja secara otomatis dengan menggunakan prinsip kerja laser. Alat ini dapat bekerja secara otomatis karena dikendalikan oleh mikrokontroller ATmega 8535. Secara keseluruhan sistem ini terdiri dari perancangan sensor barang, pengendali barang, konveyor, dan catu daya.
Pendeteksian barang terdiri dari teknologi mikrokontroler 8535, laser, photodioda,LCD, dan tampilan PC.Tahapan uji coba alat ini meliputi, uji rangkaian sensor, uji coba rangkaian motor servo, dan uji coba alat pemilah dan penghitung barang otomatis. Ketika barang dideteksi maka sensor laser akan melakukan pengambilan data. Data yang diambil akan dikirim ke mikrokontroller dan ditampilkan ke LCD dan PC. Adapun perangkat tambahan berupa palang pemisah barang bagus dan rusak dengan memanfaatkan motor servo DC. Akurasi kemampuan sistem mendeteksi barang yaitu 95 – 100% dengan persentase kesalahan dari 0 – 5
%.
Kata Kunci: ATmega 8535, conveyor , laser , lcd , Motor DC , Motor Servo
DESIGN OF AUTOMATIC FRUITS COUNTER AND SORTER SYSTEM USING LASER DIODE SENSOR
WITH PC INTERFACE
ABSTRACT
This study discusses the design manufacture goods selector tool and countdown the number of items that work automatically by using the principle of laser. This tool can work automatically because it is controlled by a microcontroller ATmega 8535.
Overall the design of the system consists of sensors goods, goods contollers, conveyors, and power supply. This tool detection consists of microcontroller 8535, laser, photodiode, LCD and PC interface. Stages of test coverage tools, test sensor circuit, servo motor circuit testing, and testing tools automated sorter and counter items. When the tools are detected so that laser sensor will record that data. Data which is recorded will be sent to microcontroller and displayed on LCD and PC. The addition componens are good and bad tool crossbar which use DC servo motor. The system ability accuracy to detect tools is 95- 100% with error percentage from 0 to 5%
Keyword : Atmega 8535, conveyor, laser , lcd , Motor DC , Motor Servo
PENGHARGAAN
Puji dan syukur disampaikan kehadirat Allah SWT atas rahmat dan karuniaNya sehingga dapat diselesaikan penulisan Skripsi dengan judul “Perancangan Sistem Penghitung dan Pemilah Buah Otomatis Menggunakan Sensor Laser Dioda dengan Tampilan PC”
Ucapan terima kasih yang setulusnya dan penghargaan yang setingginya disampaikan kepada Bapak Drs. Takdir Tamba, M.Eng.Sc selaku Pembimbing yang telah memberikan kesempatan, motivasi, ilmu, nasihat dan dukungan dalam membimbing penulis selama ini. Prof. Dr. Nasruddin MN, M.Eng. Sc dan Dr.
Kerista Tarigan, M.Eng.Sc selaku komisi pembanding atas saran dan kritik yang diberikan. Novita Ayu Irawana Hulu selaku sahabat paling spesial yang selalu memberikan waktu, mendukung, menemani dan motivasi selama mengerjakan penelitian. Rica Asrosa, Putri Mila Senda, Candra Sinaga dan Abdul Floranda Girsang selaku sahabat yang senantiasa membantu dan mendengar keluh kesah penulis. Semua anggota group Bandit Syar‟i yang selalu memberikan masukan, pandangan, ilmu, dukungan dan semangat. Kepala lab dan seluruh Asisten Laboratorium Fisika Gelombang atas kebersamaan selama ini. Bapak Dr. Perdinan Sinuhaji, MS dan Bapak Awan Maghfirah, M.Si selaku ketua program studi dan sekretaris program studi Fisika FMIPA USU Medan, dekan dan wakil dekan FMIPA USU, seluruh staf dan dosen program studi fisika FMIPA USU, dan Fisika 2014 serta semua pihak yang telah membantu yang tidak dapat disebutkan satu-persatu.
Akhirnya terimakasih yang paling setulusnya diucapkan kepada Ibunda Elida Damanik dan Ayahanda Zufri Matondang, insan yang senantiasa menyebut nama penulis dalam setiap doanya, yang tiada henti memberikan dukungan dan pengorbanan yang tak terkira sehingga penulis berada di tahap ini. Semoga Allah memberikan kebaikan dunia dan akhirat atas segala bantuan yang telah diberikan.
Medan, 14 Agustus 2018 Muhammad Ardiansyah Matondang
DAFTAR ISI
PENGESAHAN SKRIPSI ... i
ABSTRAK ... ii
ABSTRACT ... iii
PENGHARGAAN ... iv
DAFTAR ISI ... v
DAFTAR TABEL ... vii
DAFTAR GAMBAR ... viii
DAFTAR LAMPIRAN ... ix
BAB 1 PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Perumusan Masalah ... 2
1.2.1 Rumusan Masalah... 2
1.2.2 Batasan Masalah ... 2
1.3 Tujuan dan Manfaat Penelitian ... 3
1.3.1 Tujuan Penelitian ... 3
1.3.2 Manfaat Penelitian ... 3
BAB 2 TINJAUAN PUSTAKA ... 4
2.1 Mikrokontroler ATMega 8535 ... 4
2.1.1 Fitur ATMega 8535 ... 4
2.1.2 Deskripsi Pin-Pin Pada Mikrokontroler ATMega8535 ... 5
2.2 Motor Servo ... 7
2.3 Dioda Laser 5v Copper ... 8
2.4 Photodioda ... 9
2.5 IC LM7805 ... 12
2.6 Resistor ... 13
2.7 LCD (Liquid Cristal Display) ... 16
2.8 Motor DC ... 17
BAB 3 PERANCANGAN SISTEM ... 19
3.1 Diagram Blok ... 19
3.2 Ragkaian Mikrokontroler ATMega 8535 ... 20
3.3 Rangkaian Motor Servo MG995 ... 21
3.4 Rangkain Motor DC 300 rpm ... 22
3.5 Rangkaian LCD 16 x 2 ... 23
3.6 Rangkaian USB to TTL – RS232 Conventer PL2303HX UART ... 24
3.7 Rangkaian Sensor Dioda Laser dan Photodioda ... 25
3.8 Rangkaian Lengkap ... 26
3.9 Diagram alir (Flowchart)... 27
BAB 4 PENGUJIAN ALAT DAN PROGRAM ... 28
4.1 Pengujian rangkaian sensor laser ... 28
4.2 Pengujian Rangkaian LCD ... 29
4.3 Pengujian Rangkaian Power Supply ... 31
4.4 Pengujian Rangkaian Motor Servo ... 31
4.5 Pengujian Rangkaian Keseluruhan ... 32
4.6 Pembahasan ... 34
BAB 5 KESIMPULAN DAN SARAN ... 35
5.1 Kesimpulan ... 35
5.2 Saran ... 35
DAFTAR PUSTAKA ... 37 LAMPIRAN
DAFTAR TABEL
Nomor
Tabel Judul Halaman
4.1 Pengujian Tegangan Output Sensor pada Buah Berjalan 29
4.2 Pengujian LCD 30
4.3 Pengujian Power Supply 31
4.4 Pengujian Tegangan Motor Servo 32
4.5 Pengujian Penghitung dan Pemisah Barang Berdasarkan
Ukuran 33
DAFTAR GAMBAR
Nomor
Gambar Judul Halaman
2.1 Konfigurasi pin ATmega8535 5
2.2 Besar pulsa Motor Servo 8
2.3 Dioda Laser 9
2.4 Fotodioda 9
2.5 Sinar Infra merah 11
2.6 IC LM7805 12
2.7 Resistor 15
2.8 Simbol resistor variable 16
2.9 LCD 16
3.3 Diagram Blok Sistem Kerja Secara Sistem Umum 19
3.4 Rangkaian mikrokontroler ATMega8535 20
3.5 Rangkaian Motor Servo 21
4.1 Rangkaian Motor DC 22
4.2 Rangkaian LCD 16 x 2 23
4.3 Rangkaian USB to TTL 24
4.4 Rangkaian Sensor Laser dan Photodioda 25
4.5 Rangkaian Lengkap 26
DAFTAR LAMPIRAN
Nomor
Lampiran Judul Halaman
1 Gambar Pengujian Tampilan LCD 38
2 Gambar Pengujian Power Supply 38
3 Gambar Pengujian keselurah alat 39
4 Gambar Pengujian Motor Servo 39
5 Gambar Tampilan PC pada Pengujian Alat 40
6 Gambar Rangkain Lengkap 41
7 Program Lengkap 42
8 Datasheet Atmega 8535 47
9 Datasheet Dioda Laser Merah 58
10 Datasheet LCD 60
11 Datasheet Motor Servo MG995 63
12 Datasheet Photodioda 64
13 Datasheet Motor DC 66
14 Datasheet TTL RS232 68
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Kemajuan Ilmu Pengetahuan dan Teknologi ( IPTEK ) merupakan penopang bagi perkembangan di bidang elektronika khususnya instrumentasi. Berkembangnya teknologi digital dan mikroelektronik, mengakibatkan timbulnya rangkaian terpadu (Integrated Circuit, IC) yang kemampuan operasinya semakin handal.
Komponen IC ini memuat rangkaian-rangkaian dan komponen-komponen elektronika memiliki fungsi-fungsi khusus, seperti mikroprosesor, EPROM, RAM, I/O, ADC, DAC dan lain-lain.
Perusahaan selalu berupaya untuk mengganti pekerjaan yang selama ini dilakukan oleh manusia untuk digantikan dengan mesin-mesin dalam rangka efisiensi dan peningkatan kualitas produksinya. Dengan kata lain banyak perusahaan melakukan otomasi produksinya. Misalnya, proses produksi yang pada awalnya masih dilakukan secara manual seperti pada proses sortir buah.
Pada proses industri manual dikerjakan oleh tenaga manusia dan membutuhkan jumlah tenaga kerja yang tidak sedikit dan membuat waktu proses produksi menjadi lebih lama. Selain itu sering terjadi human error pada industri manual ini karena melakukan pekerjaan secara berulang-ulang. Untuk mengatasi masalah itu, perusahaan yang menginginkan proses produksi yang lebih efektif dan efisien melakukan perubahan pola produksi dengan mengaplikasikan sistem otomasi dalam produksinya. Seperti halnya dalam memilih buah berdasarkan besar yang berbeda akan membutuhkan suatu alat yang bisa memilah buah-buah tersebut secara otomatis.
Dengan adanya mikrokontroler dapat dimanfaatkan sebagai pengolahdata dari sensor dan menjadikannya suatu tampilan akhir dalam proses pemilah buah.
Otomatisasi akan sangat membantu dalam proses produksi produk-produk tersebut. Dengan perkembangan teknologi mikrokontroler dan komputer masalah pengendalian elektronis menjadi semakin mudah. Dari berbagai permasalahan di atas penulis mencoba untuk bereksperimen dengan cara menuangkan ide melalui
sebuah karya teknologi yang kiranya dapat menjawab ataupun mengurangi beban permasalahan tersebut. Alat yang akan dibuat adalah alat pemilah dan penghitung jumlah buah berdasarkan prinsip kerja laser. Pemilah buah berdasarkan ukuran (besar, sedang, dan kecil) Menggunakan Sensor Laser Berbasis Mikrokontroler.
Alat ini juga diharapkan dapat mempermudah bagi kalangan akademisi dalam mempelajari sistem otomasi yang bisa diterapkan di industri.
1.2 Perumusan Masalah 1.2.1 Rumusan Masalah
Berdasarkan latar belakang yang telah dikemukakan di atas maka dapat dirumuskan beberapa permasalahan yang akan diselesaikan, yaitu sebagai berikut:
1. Bagaimana merancang sensor laser dan fotodioda agar dapat menghitug jumlah buah otomatis.
2. Bagaimana merancang sensor laser dan fotodioda agar dapat membedakan jumlah buah berdasarkan ukuran.
3. Bagaimanna mengolah data sensor kedalam mikrokontroler sehingga nilai yang dibaca dapat diamati secara langsung melalui PC
1.2.2 Batasan Masalah
Untuk mendapatkan suatu hasil penelitian dari permasalahan yang telah ditentukan, maka diperlukan pembatasan masalah dari penelitian. Adapun batasan masalah dalam penelitian ini adalah :
1. Penelitian yang dibuat masih dalam bentuk miniatur, tata letak sensor laser menyesuaikan dengan kondisi konveyor.
2. Pengujian alat dilakukan dengan menjadikan hasil bacaan pada sensor laser dan tampilan data di PC sebagai acuan.
3. Microcontroller yang digunakan adalah microcontroller berjenis Atmega8535 serta interface ke PC.
4. Bahasa program yang digunakan adalah IDE Arduino yang memiliki struktur program bahasa C.
5. Pengujian sample menggunakan buah jeruk dan ukuran buah kecil, sedang, dan besar sudah di kategorikan sesuia ukuran konveyor
1.3 Tujuan dan Manfaat Penelitian 1.3.1 Tujuan Penelitian
Sebagai tujuan yang ingin dicapai dalam penelitian :
1. Merancang alat yang dapat menghitung dan memilah buah berdasarkan ukuran menggunakan sensor laser dan fotodioda.
2. Mengetahui prinsip kerja alat pemilah buah menggunakan laser dan fotodioda berbasis mikrokontroler.
3. Mengetahui prinsip kerja alat penghitung jumlah buah menggunakan laser dan fotodioda berbasis mikrokontroler.
1.3.2 Manfaat Penelitian
Manfaat yang dapat diambil dari penelitian :
1. Memberikan kemudahan kepada industri barang dan buah untuk mengetahui jumlah barang akhir yang siap didistribusi.
2. Dapat membuat prototype alat pemilah barang menggunakan laser berbasis mikrokontroler.
3. Mempermudah bagi kalangan akademisi dalam mempelajari sistem otomasi yang bisa diterapkan di industri.
BAB 2
LANDASAN TEORI
2.1. Mikrokontroller ATmega 8535
Mikrokontroler merupakan system computer yang seluruh atau sebagian esar elemennya dikemas dalam satu chip IC, sehingga sering juga disebut dengan single chip microcomputer. Mikrokontroler biasa dikelompokkan dalam satu keluarga, masing-masing mikrokontroler memiliki spesifikasi tersendiri namun masih kompatibel dalam pemrogramannya. Mikrokontroler dapat dianalogikan dengan sebuah system computer yang dikemas dalam sebuah chip. Artinya bahwa di daam sebuah IC mikrokontroler sebenarnya sudah terdapat kebutuhan minimal agar mikroprosesor dapat bekerja, yaitu meliputi mikroprosesor, ROM, RAM, I/O dan clock seperti halnya yang dimiliki oleh sebuah computer PC. ATmega8535 memiliki fitur yang cukup lengkap, mulai dari kapasitas memori program dan memori data yang cukup besar, interupsi, timer/counter, PWM, USART, TWI, analog comparator, EEPROM internal dan juga ADC internal semuanya ada di dalam ATmega8535.
Mikrokontroler jenis MCS memiliki kecepatan frekuensi kerja 1/12 kali frekuensi osilator yang digunakan sedangkan pada kecepatan frekuensi kerja AVR sama dengan kecepatan frekuensi kerja osiator yang digunakan. Jadi apabia menggunakan frekuensi osilator yang sama, maka AVR memiliki kecepatan kerja 12 kali lebih cepat dibandingkan dengan MCS. Kemampuan eksekusi yang lebih tinggi menjadi alasan bagi banyak orang untuk beralih dan lebih memilih menggunakan mikrokontroler jenis AVR ketimbang mikrokontroler pendahulunya yaitu keluarga MCS-51. Mikrokontroller ATmega8535 adalah mikrokontroller 8 bit buatan ATMEL dengan 8 KByte System Programable Flash dengan teknologi memori tak sumirna (nonvolatile), kepadatan tinggi, dan kompatibel dengan pin out dan set instruksi standar industri MCS51 INTEL.
2.1.1 Fitur ATMEGA8535
Berikut ini adalah fitur-fitur yang dimiliki oleh ATMega 8535.
1. 130 macam intruksi yang hampir semuanya dieksekusi dalam satu siklus
clock
2.32 x 8-bit register serbaguna
3. Kecepatan mencapai 16 MIPS dengan clock 16 MHz
4. 8 Kbyte Flash Memori, yang memiliki fasilitas In System Programming 5. 512 Byte internal EEPROM
6. 512 Byte SRAM
7. Programming Lock, fasilitas untuk mengamankan kode program 8. 2 buah timer/counter 8-bit dan 1 buah timer/counter 16-bit 9. 4 channel output PWM
10. 8 channel ADC 10-bit 11. Serial USART
12. Master/Slave SPI serial interface 13. Serial TWI atau 12C
14. On-Chip Analog Comparator
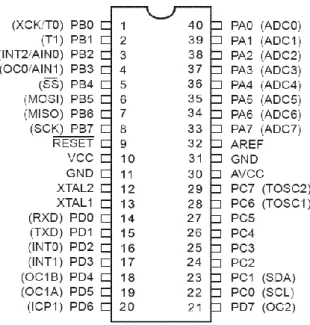
Gambar 2.1. Konfigurasi pin ATmega8535 2.1.2 Deskripsi Pin-Pin Pada Mikrokontroler ATMega8535 2.1.2.1 Port B
Merupakan Port I/O 8-bit dua arah dengan resistor pull-up internal. Selain sebagai Port I/O 8-bit Port B juga dapat difungsikan sebagai berikut :
1. PB7 : SCK = SPI bus serial clock
2. PB6 : MISO = SPI bus master input / slave output
3. PB5 : MOSI = SPI bus master output / slave input 4. PB4 : SS = SPI slave select input
5. PB3 : AIN1 = analog comparator negative input 6. PB2 : AIN0 = analog comparator positive input 7. PB1 : T1 = timer/counter 0 external counter input 8. PB0 : T0 = timer/counter 0 external counter input 2.1.2.2 RESET (Reset input)
RESET (RST) pada pin 9 merupakan pin reset yang akan bekerja bila diberi pulsa rendah selama minimal 1.5 us.
2.1.2.3 VCC
VCC merupakan pin yang berfungsi sebagai catu daya digital 2.1.2.4 GND
Ground untuk catu daya digital.
2.1.2.5 XTAL2
Merupakan output dari penguat osilator pembalik.
2.1.2.6 XTAL1
Merupakan input ke penguat osilator pembalik dan input ke internal clock 2.1.2.7 Port D
Merupakan Port I/O 8-bit dua arah dengan resistor pull-up internal. Selain sebagai Port I/O 8-bit Port D juga dapat difungsikan secara individu sebagai berikut : 1. PD7 : OC2 (Timer/Counter2 output compare match output)
2. PD6 : ICP (Timer/Counter1 input capture pin)
3. PD5 : OC1A (Timer/Counter1 output compareA match output) 4. PD4 : OC1B (Timer/Counter1 output compare B match output) 5. PD3 : INT1 ( external interrupt 1 input )
6. PD2 : INT0 ( external interrupt 0 input ) 7. PD1 : TDX (UART output line)
8. PD0 : RDX (UART input line)
2.1.2.8 Port C
Merupakan Port I/O 8-bit dua arah dengan resistor pull-up internal. Selain sebagai Port I/O 8-bit 4 bit Port C juga dapat difungsikan secara individual sebagai berikut:
1. PC7 : TOSC2 (timer oscillator 2) 2. PC6 : TOSC1 (timer oscillator 1) 3. PC1: SDA ( serial data input/output) 4. PC0 : SCL (serial clock)
2.1.2.9 AVCC
Merupakan catu daya yang digunakan untuk masukan analog, ADC yang terhubung ke Port A
2.1.2.10 GND
Ground untuk catu daya analog.
2.1.2.11 AREF
AREF adalah tegangan referensi analog untuk ADC.
2.1.2.12 Port A
Merupakan Port I/O 8-bit dua arah dengan resistansi pull-up internal. Selain sebagai Port I/O 8-bit juga dapat difungsikan sebagai masukan 8 channel ADC.
2.2. Motor Servo
Motor servo adalah jenis motor DC dengan sistem umpan balik tertutup yang terdiri dari sebuah motor DC, serangkaian gear, rangkaian kontrol, dan juga potensiometer. Jadi motor servo sebenarnya tak berdiri sendiri, melainkan didukung oleh komponen-komponen lain yang berada dalam satu paket . Motor servo dapat menampilkan gerakan 0 derajat, 90 derajat, 180 derajat, hingga 360 derajat. Tak heran jika motor ini banyak diaplikasikan untuk penggerak kaki dan juga lengan robot. Selain itu motor servo juga memiliki torsi yang besar sehingga mampu menopang beban cukup berat.
Motor servo adalah motor yang mampu bekerja dua arah(CW danCCW) dimana arah dan sudutpergerakan rotornya dapat dikendalikan hanya dengan memberikan pengaturan duty cycle sinyal PWM pada bagian pin kontrolnya. Motor servo adalah jenis motor yang digunakan sebagai penggerak pada sistem servo (servo-system) seperti pada penggerak pada control posisi lengan robot.
Gambar 2.2. Motor Servo
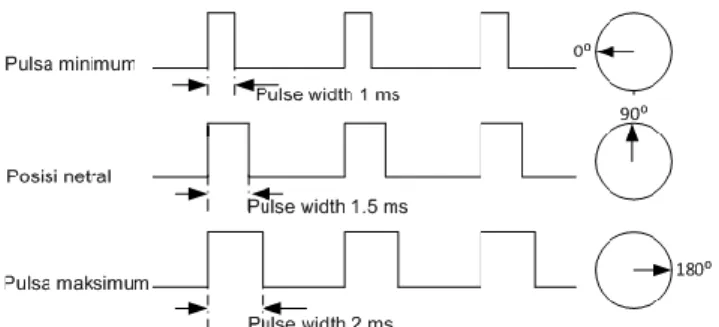
Motor Servo akan bekerja secara baik jika pada bagian pin kontrolnya diberikan sinyal PWM denganfrekuensi 50 Hz. Dimana pada saat sinyal dengan frekuensi 50 Hz tersebut dicapai pada kondisi ton duty cycle 1.5 ms, maka rotor dari motor akan berhenti tepat ditengah-tengah (sudut 0°/ netral). Pada saat ton duty cycle dari sinyal yang diberikan kurang dari1.5ms, maka rotor akan berputar kearah kiri dengan membentuk sudut yang besarnya linier terhadap besarnya ton duty cycle, dan akan bertahan diposisi tersebut.
2.3. Dioda Laser 5v Copper
Laser (singkatan dari bahasa Inggris: Light Amplification by Stimulated Emission of Radiation)merupakan mekanisme suatu alat yang memancarkanradiasi elektromagnetik, biasanya dalam bentuk cahayayang tidak dapat dilihat maupun dapat lihat dengan matanormal, melalui proses pancaran terstimulasi. Pancaranlaser biasanya tunggal, memancarkan foton dalampancaran koheren. Laser juga dapat dikatakan efek darimekanika kuantum.
Dalam teknologi laser, cahaya yang koheren menunjukkan suatu sumber cahaya yang memancarkanpanjang gelombang yang diidentifikasi dari frekuensiyang sama, beda fase yang konstandan polarisasinya.Selanjutnya untuk menghasilkan sebuah cahaya yangkoheren dari medium lasing adalah dengan mengontrol kemurnian, ukuran, dan bentuknya. Keluaran yang berkelanjutan dari laser dengan
amplituda-konstan (dikenal sebagai CW atau gelombang berkelanjutan), atau detak, adalah dengan menggunakan teknik Qswitching, modelocking, atau gain-switching.
Gambar 2.3.DiodaLaser
Dalam operasi detak, dimana sejumlah daya puncak yang lebih tinggi dapat dicapai. Sebuah medium laser juga dapat berfungsi sebagai penguat optik ketika diseeddengan cahaya dari sumber lainnya. Sinyal yang diperkuat dapat menjadi sangat mirip dengan sinyal input dalam istilah panjang gelombang, fase, dan polarisasi; Ini tentunya penting dalam telekomunikasi serat optik. Beberapa jenis laser, seperti laser dye dan laser vibronik benda-padat (vibronic solid-state lasers) dapat memproduksi cahaya lewat jangka lebar gelombang; properti ini membuat mereka cocok untuk penciptaan detak singkat sangat pendek dari cahaya, dalam jangka femtodetik (10-15 detik). Banyak teori mekanika kuantum dan termodinamika dapat digunakan kepada aksi laser, meskipun nyatanya banyak jenis laserditemukan dengan cara trial and error.
2.4. Photodioda
Photodioda merupakan sensor cahaya semikonduktor yang dapat mengubah besaran cahaya menjadi besaran listrik. Photodioda bekerja berdasarkan intensitas cahaya. Jika photodioda terkena cahaya maka photodioda bekerja seperti dioda pada umumnya tetapi jika tidak mendapat cahaya maka photodioda akan berperan seperti resistor dengan nilai tahanan yang besar sehingga arus listrik tidak dapat mengalir.
Gambar 2.4. Fotodioda
Arah Arus yang melalui sebuah semikonduktor adalah kebalikan dengan gerak muatan pembawa. Cara tersebut didalam sebuah photodiode digunakan untuk mengumpulkan photon menyebabkan pembawa muatan terbentuk di bagian-bagian elektroda. Saat photodiode terkena cahaya, maka akan bersifat sebagai sumber tegangan dan nilai resistansinya akan menjadi kecil. Saat fotodiode tidak terkena cahaya, maka nilai resistansinya akan besar atau dapat diasumsikan tak hingga.Photodioda dibuat dari semikonduktor dengan bahan yang populer adalah silicon ( Si) atau galium arsenida ( GaAs), dan yang lain meliputi InSb, InAs, PbSe.
Material ini menyerap cahaya dengan karakteristik panjang gelombang mencakup:
2500 Å – 11000 Å untuk silicon, 8000 Å – 20,000 Å untuk GaAs. Ketika sebuah photon (satu satuan energi dalam cahaya) dari sumber cahaya diserap, hal tersebut membangkitkan suatu elektron dan menghasilkan sepasang pembawa muatan tunggal, sebuah elektron dan sebuah hole, di mana suatu hole adalah bagian dari kisi- kisi semikonduktor yang kehilangan elektron. Arah Arus yang melalui sebuah semikonduktor adalah kebalikan dengan gerak muatan pembawa.cara tersebut didalam sebuah photodiode digunakan untuk mengumpulkan photon – menyebabkan pembawa muatan (seperti arus atau tegangan) mengalir/terbentuk di bagian-bagian elektroda.
Saat photodiode terkena cahaya, maka akan bersifat sebagai sumber tegangan dan nilai resistansinya akan menjadi kecil.Saat photodiode tidak terkena cahaya, maka nilai resistansinya akan besar atau dapat diasumsikan tak hingga.
Ket : besarnya tegangan atau arus listrik yang dihasilkan oleh photodiode tergantung besar kecilnya radiasi yang dipancarkan oleh infrared
Photodioda digunakan sebagai penangkap gelombang cahaya yang dipancarkan oleh Infrared. Besarnya tegangan atau arus listrik yang dihasilkan oleh photodioda tergantung besar kecilnya radiasi yang dipancarkan oleh infrared.
Photo dioda adalah sensor cahaya yang termasuk kategori sensor cahaya photo conductive yaitu sensor cahaya yang akan mengubah perubahan intensitas cahaya yang diterima menjadi perubahan konduktansi pada terminal sensor tersebut.
Dioda photo merupakan sensor cahaya yang akan mengalirkan arus listrik satu arah saja dimana akan menglirkan arus listrik dari kaki anoda ke kaki katoda pada saat
menerima intensitas cahaya. Photo dioda sering digunakan pada aplikasi penerima cahaya infra merah.
Karakteristik photo dioda :
Photodioda mempunyai respon 100 kali lebih cepat daripada phototransistor
Dikemas dengan plastik transparan yang juga berfungsi sebagai lensa. Lensa tsb lebih dikenal sebagai „lensa fresnel‟ dan „optical filter‟
Penerima infra merah juga dipengaruhi oleh „active area‟ dan „respond time‟.
Jenis-jenis inframerah berdasarkan panjang gelombang :
Inframerah jarak dekat dengan panjang gelombang 0.75 – 1.5 µm
Inframerah jarak menengah dengan panjang gelombang 1.50 – 10 µm
Inframerah jarak jauh dengan panjang gelombang 10 – 100 µm
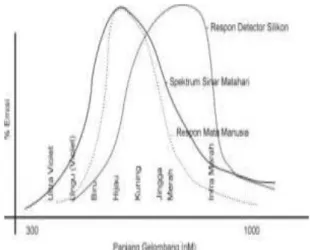
Cahaya infra merah merupakan cahaya yang tidak tampak. Jika dilihat dengan spektroskop cahaya maka radiasi cahaya infra merah akan nampak pada spectrum electromagnet dengan panjang gelombang diatas panjang gelombang cahaya merah.
Dengan panjang gelombang ini maka cahaya inframerah ini akan tidak tampak oleh mata namun radiasi panas yang ditimbulkannya masih terasa/dideteksi.
Gambar 2.5 Sinar Infra merah
PhotoDioda adalah komponen elektronika yang merupakan jenis dioda biasanya berfungsi mendeteksi cahaya. Photo Dioda akan mengubah cahaya menjadi arus listrik. Komponen elektronika ini mampu mendeteksi bermacam-macam jenis cahaya yaitu mulai dari cahaya infra merah, cahaya tampak, ultra violet sampai dengan Sinar-X.
Bila dibandingkan dengan dua jenis sensor cahaya lainnya, photodiode memiliki waktu tanggap yang lebih cepat.Photodiode memiliki tingkat kepekaan terhadap cahaya yang lebih baik dari LDR maupun phototransistor.Tanggapan frekuensi sensor fotodioda tidak luas. Dari rentang tanggapan itu sensor fotodiodamemiliki tanggapan palin baik terhadap cahaya infra merah, tepatnya pada cahaya dengan panjang gelombang sekitar 0,9µm.
2.5. IC LM7805
LM7805 adalah regulator tegangan DC positif yang hanya memiliki 3 terminal, yaitu tegangan input, ground, tegangan output. Meskipun LM7805 diutamakan dirancang untuk keluaran tegangan tetap (5V), akan tetapi ada kemungkinan jika menggunakan komponen eksternal untuk mendapatkan tegangan output DC: 5V, 6V, 8V, 9V, 10V, 12V, 15V, 18V, 20V , 24V.
Fitur Umum:
Sampai sekarang untuk output 1A
Output Tegangan dari 5, 6, 8, 9, 10, 12, 15, 18, hingga 24V
Melindungi suhu yang berlebih
Melindungi sirkuit pendek
Output Transistor melindungi operasi pada daerah yang dilindungi
Gambar 2.6. IC LM7805
7805 adalah regulator tegangan tiga-terminal positif. Dengan heatsinking memadai, dapat memberikan lebih dari 0.5A arus keluaran. Aplikasi yang umum akan mencakup lokal (on-card) regulator yang dapat menghilangkan kebisingan dan kinerja yang rusak terkait dengan satu-titik regulasi. 7805 regulator berasal dari keluarga 78xx, terdapat rangkaian regulator tegangan linier yang tetap terintegrasi.
Keluarga 78xx adalah pilihan yang sangat populer untuk banyak sirkuit elektronik yang membutuhkan catu daya yang diatur, karena relatif mudah penggunaan dan
murah. Ketika menentukan individu IC dalam keluarga 78xx ini, xx diganti dengan angka dua digit, yang menunjukkan tegangan output perangkat tertentu dirancang untuk memberikan (misalnya, 7805 regulator tegangan memiliki output 5 volt, sedangkan 7812 menghasilkan 12 volt). Garis 78xx adalah regulator tegangan positif, yang berarti bahwa mereka dirancang untuk menghasilkan tegangan yang relatif positif untuk kesamaan. Ada garis terkait perangkat 79xx yang melengkapi regulator tegangan negatif. 79xx 78xx dan IC dapat digunakan dalam kombinasi untuk menyediakan pasokan tegangan positif dan negatif dalam sirkuit yang sama, jika perlu.
Seri 7805 memiliki beberapa kelebihan dibandingkan regulator tegangan lains:
IC seri 7805 tidak memerlukan komponen tambahan untuk menyediakan sumber pengaturan konstan, mudah untuk digunakan, serta ekonomis, dan juga menggunakan sirkuit board yang efisien dan nyata. Sebaliknya, kebanyakan regulator tegangan lain memerlukan beberapa komponen tambahan untuk mengatur level tegangan keluaran dan untuk membantu dalam proses regulasi. Beberapa desain lain (seperti switching power supply) tidak hanya memerlukan sejumlah komponen besar, tetapi juga teknik keahlian yang besar untuk menerapkannya dengan benar.
IC seri 7805 memiliki perlindungan body pada circuit yang memiliki banyak power. IC seri 7805 juga memiliki perlindungan terhadap panas dan sirkuit pendek, membuat IC ini cukup kuat dalam sebagian besar aplikasi. Dalam beberapa kasus, pada pembatas arus fitur dari perangkat 7805 dapat memberikan perlindungan tidak hanya untuk 7805 sendiri, tetapi juga untuk bagian lain dari dalam sirkuit yang digunakan, juga mampu mencegah komponen lain dari kerusakan.
2.6 Resistor
Fungsi resistor dapat diumpamakan dengan sekeping papan yang dipergunakan untuk menahan aliran air yang deras di suatu selokan. Dengan memakai tahanan papan ini maka arus air bisa terhambat alirannya. Perumpamaan ini dapat dipergunakan dalam tahanan listrik. Dapat disimpulkan bahwa resistor merupakan komponen yang berfungsi dalam menghambat arus listrik. Resitor dengan nilai tahanan yang tepat sangat diperlukan dalam mengatur nilai tegangan yang tepat
untuk bisa mengoperasikan suatu rangkaian dengan sempurna. Dalam dunia elektronika, resistor diterapkan sebagai pembagi tegangan untuk menghasilkan tegangan tertentu sebagai beban pada rangkaian.
Secara umum fungsi dari resistor adalah sebagai berikut:
a) Melewatkan sebagian arus listrik agar sesuai dengan kebutuhan suatu rangkaian elektronika
b) Menurunkan tegangan dengan yang dibutuhkan pada rangkaian c) Bekerja dengan transistor dan kapasitor dalam suatu rangkaian untuk
membangkitan frekuensi rendah dan frekwensi tinggi.
d) Pembagi tegangan
Fungsi resistor sebagai penghambat arus sesuai dengan persamaan:
𝐼 = 𝑉 / 𝑅 (2.1)
Dimana:
I = arus (ampere) V = tegangan (volt) R = tahanan (ohm)
Dua karakteristik utama yang harus diketahui pada resistor adalah besar resistansi pada rating dayanya. Rating daya pada sebuah resistor menunjukkan kemampuan resistor tersebut dalam mendisipasi daya. Untuk mengetahui besarsebuah resistor untuk mendisipasi daya berlaku persamaan berikut:
𝑃 = 𝑉2 / 𝑅 (2.2)
Dimana:
P = Daya (Watt) V = Tegangan (Volt)
R = Resistansi / tahanan (ohm)
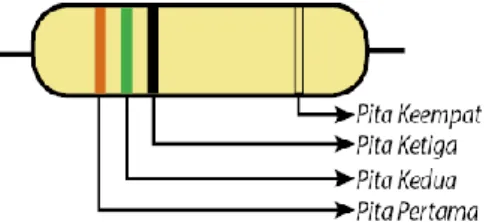
Adapun disipasi daya maksimum resistor dilewati akan mengakibatkan panas yang berlebihan yang dapat merusak resistor. Resistor yang paling banyak dipergunakan terbuat dari karbon yang dilapisi pada sebatang keramik. Untuk mengetahui nilai dari resistor ini dapat dilakukan dengan membaca kode warna, kode angka atau diukur langsung dengan ohm meter. Dalam pembacaan dengan kode warna dapat dilihat pada gelang-gelang yang terdapat pada badan resistor seperti terlihat pada gambar berikut:
Gambar 2.7. Resistor
Pada gambar diatas cincin-cincin warna tersebut menunjukkan hal-hal sebagai berikut
Cincin ke 1: menunjukkan angka ke 1 Cincin ke 2: menunjukkan angka ke 2
Cincin ke 3: merupakan faktor pengali dari angka pertama dan kedua.
Cincin ke 4: menunjukan besarnya toleransi tahanan.
Resistor sebagai tahanan terbagi dalam dua jenis yaitu:
a. Resistor tetap:
1) Resistor tawar logam, misalnya tahanan dari kawat logam yang digulung dipermukaan tabung kaca.
2) Resistor arang, resistor ini paling banyak digunakan pada rangkaian elektronika.
b. Resistor variable, yaitu resistor yang besarnya dapat disesuaikan dengankebutuhan. Resistor ini banyak digunakan didalam rangkaian elektronika, secara umum dikenal sebagai potensiometer. Potensiometer dirancang untuk memberikan suatu perubahan resistansi yang banyak sesuai dengan kebutuhan.
Potensiometerdibuat dalam berbagai bentuk untuk pemakaian dalam industri.
Potensiometer dapat dibagi dalam dua bentuk yaitu:
1. potensiometer tergeser (berbentuk batangan yang memanjang, sering digunakan pada equalizer)
2. potensiometer terputar (berbentuk bulatan dan sering digunakan dalam pengaturan volume, bas, treble, dan lain lain.
Resistor variable disimbolkan sebagai berikut:
Gambar 2.8. Simbol resistor variable 2.7 LCD (Liquid Cristal Display)
Display elektronik adalah salah satu komponen elektronika yang berfungsi sebagai tampilan suatu data, baik karakter, huruf ataupun grafik. LCD (Liquid Cristal Display) adalah salah satu jenis display elektronik yang dibuat dengan teknologi CMOS logic yang bekerja dengan tidak menghasilkan cahaya tetapi memantulkan cahaya yang ada di sekelilingnya terhadap front-lit atau mentransmisikan cahaya dari back-lit. LCD (Liquid Cristal Display) berfungsi sebagai penampil data baik dalam bentuk karakter, huruf, angka ataupun grafik.
Gambar 2.9.LCD
Dalam modul LCD (Liquid Cristal Display) terdapat microcontroller yang berfungsi sebagai pengendali tampilan karakter LCD (Liquid Cristal Display).
Microntroller pada suatu LCD (Liquid Cristal Display) dilengkapi dengan memori dan register. Memori yang digunakan microcontroler internal LCD adalah :
DDRAM (Display Data Random Access Memory) merupakan memori tempat karakter yang akan ditampilkan berada.
CGRAM (Character Generator Random Access Memory) merupakan
memori untuk menggambarkan pola sebuah karakter dimana bentuk dari karakter dapat diubah-ubah sesuai dengan keinginan.
CGROM (Character Generator Read Only Memory) merupakan memori untuk menggambarkan pola sebuah karakter dimana pola tersebut merupakan
karakter dasar yang sudah ditentukan secara permanen oleh pabrikan pembuat LCD (Liquid Cristal Display) tersebut sehingga pengguna tinggal mangambilnya sesuai alamat memorinya dan tidak dapat merubah karakter dasar yang ada dalam CGROM.
Register control yang terdapat dalam suatu LCD diantaranya adalah :
Register perintah yaitu register yang berisi perintah-perintah dari mikrokontroler ke panel LCD (Liquid Cristal Display) pada saat proses penulisan data atau tempat status dari panel LCD (Liquid Cristal Display) dapat dibaca pada saat pembacaan data.
Register data yaitu register untuk menuliskan atau membaca data dari atau keDDRAM. Penulisan data pada register akan menempatkan data tersebut keDDRAM sesuai dengan alamat yang telah diatur sebelumnya.
Pin, kaki atau jalur input dan kontrol dalam suatu LCD (Liquid Cristal Display) diantaranya adalah :
Pin data adalah jalur untuk memberikan data karakter yang ingin ditampilkan menggunakan LCD (Liquid Cristal Display) dapat dihubungkan dengan bus data dari rangkaian lain seperti mikrokontroler dengan lebar data 8 bit.
Pin RS (Register Select) berfungsi sebagai indikator atau yang menentukan jenis data yang masuk, apakah data atau perintah. Logika low menunjukan yang masuk adalah perintah, sedangkan logika high menunjukan data.
Pin R/W (Read Write) berfungsi sebagai instruksi pada modul jika low tulis data, sedangkan high baca data.
Pin E (Enable) digunakan untuk memegang data baik masuk atau keluar.
Pin VLCD berfungsi mengatur kecerahan tampilan (kontras) dimana pin ini dihubungkan dengan trimpot 5 Kohm, jika tidak digunakan dihubungkan ke ground, sedangkan tegangan catu daya ke LCD sebesar 5 Volt.
2.8 Motor DC
Motor DC merupakan jenis motor yangmenggunakan tegangan searah sebagai sumber tenaganya. Dengan memberikan beda tegangan pada kedua terminal tersebut, motor akan berputar pada satu arah, dan bila polaritas dari tegangan tersebut dibalik maka arah putaran motor akan terbalik pula. Polaritas dari tegangan yang diberikan
pada dua terminal menentukan arah putaran motor sedangkan besar dari beda tegangan pada kedua terminal menentukan kecepatan motor. Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar.Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti.Motor mengubah daya masuk listrik menjadi daya keluar mekanik. Maka dengan membalik generator arus searah, dimana sekarang tegangan 𝑉𝑡 menjadi sumber tegangan dan tegangan jangkar 𝐸𝑎 merupakan ggl lawan, mesin arus searah ini akan berlaku sebagai motor. Oleh karena itu, hubungan antara tegangan𝑉𝑡 dan 𝐸𝑎 dapat dituliskan sebagai :
𝐸𝑎 = 𝑉𝑡− 𝐼𝑎𝑅𝑎 (2.3) Pengaturan kecepatan memegang peranan penting dalam motor arus searah, karena motor arus searah mempunyai karakteristik kopel-kecepatan yang menguntungkan dibandingkan dengan motor lainnya.Telah diketahui bahwa untuk motor arus searah dapat diturunkan rumus sebagai berikut :
𝐸𝑎 = 𝐶𝑛 ɸ (2.4)
𝑛 =𝑉𝑡− 𝐼𝐶 ɸ𝑎𝑅𝑎 (2.5)
Dari persamaan di atas, dapat dilihat bahwa kecepatan (n) dapat diatur dengan mengubah-ubah besaran ɸ, 𝑅𝑎, atau 𝑉𝑡
BAB 3
PERANCANGAN SISTEM 3.1. Diagram Blok
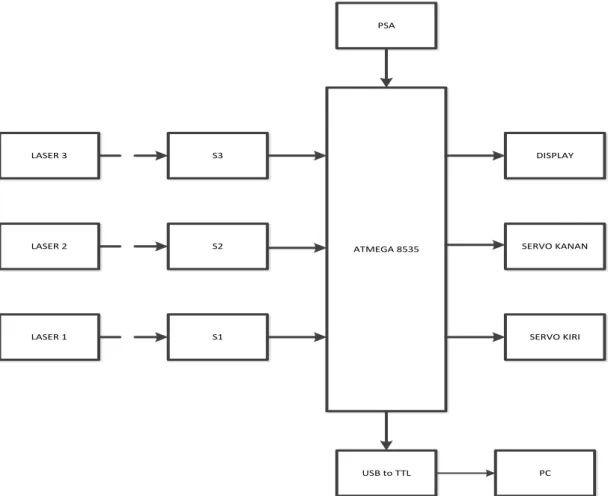
Berikut adalah diagram blok mekanisme kerja alat dalam melakukan penghitungan dan pemisah buah berdasarkan ukuran suatu buah
LASER 3
LASER 2
LASER 1
S3
S2
S1
ATMEGA 8535
DISPLAY
SERVO KANAN
SERVO KIRI
USB to TTL PSA
PC
Gambar 3.1 Diagram blok cara kerja sistem secara umum Berikut deskripsi setiap blok:
1. Blok Laser : laser sebagai pemancar cahaya
2. Blok sensor : sensor fotodioda akan menangkap cahaya yang dipancarkan laser
3. Blok ATMega 8535 : mengkonversi data dari sensor 4. Blok PSA : sebagai sumber tegangan
5. Blok Motor Servo : motor servo akan bergerak sesuai perintah dari mikrokontroler
6. Blok Display :sebagai tampilan output data
7. Blok Usb to TTL : untuk mengirimkan data dari mikrokontroler ke PC 8. Blok PC :data ditampilkan di PC
Dari gambar 3.1 blok diagram diatas dapat dijelaskan bahwa laser akan memancarkan cahaya ke buah yang akan melewati sensor fotodioda. Jika buah menghalangi cahaya laser1 maka fotodioda1 tidak menangkap cahaya dari laser1, data dikirim ke mikrokontroler dengan pembacaan pada kondisi ini ukuran buah dianggap kecil dan motor servo kiri terbuka untuk memilah buah ukuran kecil, jika buah menghalangi cahaya laser 1 dan 2 data dikirimkan ke mikrokontroler dengan pembacaan ukuran buah dianggap sedang dan motor servo kanan terbuka untuk memilah buah ukuran sedang, jika buah menghalangi ketiga laser dan data dikirimkan ke mikrokontroler dengan pembacaan ukuran buah dianggap besar.
Kemudian semua data diolah mikrokontroler untuk menghitung jumlah buah ukuran kecil, sedang, besar dan total keseluruhan jumlah buah yang akan ditampilkan di PC.
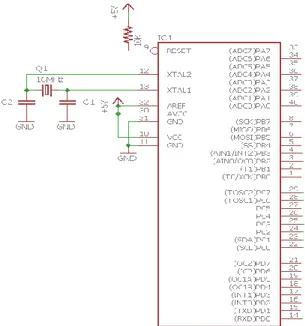
3.2 Rangkaian Mikrokontroler ATMega8535
Rangkaian sistem minimum mikrokontroler ATMega8535 dapat „dilihat pada gambar 3.2 di bawah ini :
Gambar 3.2 Rangkaian mikrokontroler ATMega8535
Dari gambar 3.2, Rangkaian tersebut berfungsi sebagai pusat kendali dari seluruh sistem yang ada. Komponen utama dari rangkaian ini adalah IC Mikrokontroler ATMega8535. Semua program diisikan pada memori dari IC ini sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki. Pin 12 dan 13 dihubungkan ke XTAL dan dua buah kapasitor. XTAL ini akan mempengaruhi kecepatan mikrokontroler ATMega8535 dalam mengeksekusi setiap perintah dalam program. Pin 9 merupakan masukan reset (aktif rendah). Pulsa transisi dari tinggi ke rendah akan me-reset mikrokontroler ini.
IC ini nantinya akan berfungsi sebagai pusat kontrol untuk mengeksekusi perintah dan memproses data yang diterima dari sensor fotodioda menampilkan data dalam lcd dan PC.
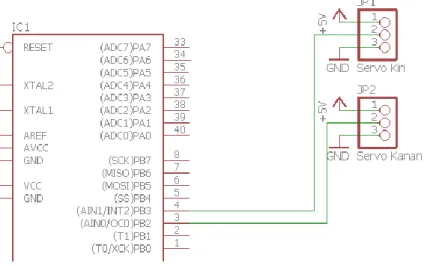
3.3 Rangkaian Motor Servo MG995
Motor servo jika terhubung pada PortC.0 pada rangkaian mikrokontroler. Motor servo mempunyai tiga masukan yaitu input, Vcc. Ground. Jika mikrokontroller di berikan logika 1 ( high) pada salah satu inputan motor servo maka motor servo tidak berkerja sedangkan jika mikrokontroler diberikan logika 0 (low) maka servo berkerja sesuai fungsi yang dibutuhkan oleh motor servo seperti yang terlihat pada Gambar 3.3.
Gambar 3.3 Rangkaian Motor Servo
Paralaks servo standar yang sangat ideal untuk robotika dan gerakan dasar proyek. Motor Servo ini akan memungkinkan suatu gerakan kisaran 0-180 derajat.
Output Servo Parallax poros gear standar konfigurasi. Servo motor menggunakan sinyal PWM untuk mengendalikan motor. Motor servo akan bekerja dengan baik pada 50 Hz dari frekuensi PWM, ini berarti sinyal PWM memiliki periode 20ms.
Sirkuit elektronik di dalam motor servo akan respons terhadap sinyal PWM width yang 0.7ms untuk 1ms PWM lebar akan membuat motor servo untuk memutar searah jarum jam (CW), maka untuk 2ms PWM 1.7ms lebar akan membuat motor servo untuk memutar berlawanan arah jarum jam ( CCW).
Untuk standar PWM servo yang lebar 1.5ms akan memutar motor servo pusatnya. Lebar PWM yang tepat tergantung pada jenis motor servo dan Parallax Servo yang digunakan masing – masing 1ms dan 2ms. Paralaks servo motor yang terdiri dari tiga kabel diwarnai dengan Putih, Merah dan Hitam. Merah dan Hitam kabel pergi ke Vcc dan Gnd, sementara kabel Putih gunakan untuk memberi sinyal PWM dari mikrokontroler ATMega8535 I / O port.
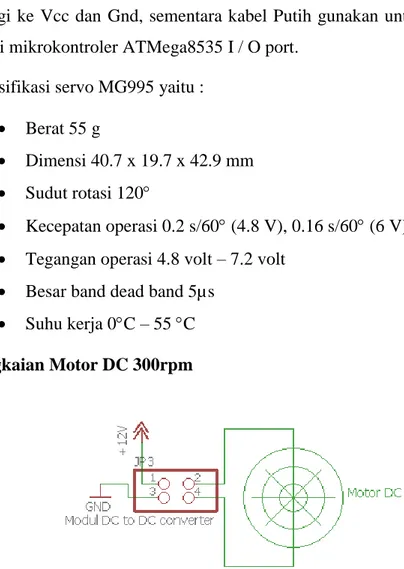
Spesifikasi servo MG995 yaitu :
Berat 55 g
Dimensi 40.7 x 19.7 x 42.9 mm
Sudut rotasi 120
Kecepatan operasi 0.2 s/60 (4.8 V), 0.16 s/60 (6 V)
Tegangan operasi 4.8 volt – 7.2 volt
Besar band dead band 5µs
Suhu kerja 0C – 55 C 3.4 Rangkaian Motor DC 300rpm
Gambar 3.4 Rangkaian Motor DC
Motor sebagai penggerak konveyor untuk menjalankan belt yang akan dilalui oleh buah untuk dipisah. Module DC - DC converter yang berfungsi mengubah tegangan masukan (input) menjadi tegangan keluaran (output) yang lebih tinggi supaya putaran motor dapat dipercepat atau diperlambat untuk mengatur kecepatan jalannya belt.Tegangan output bisa diatur dengan cara memutar trimpot.Jika terjadi perubahan tegangan input, maka tegangan output akan tetap stabil karena modul ini juga berfungsi sebagai regulator.
Spesifikasi :
Tegangan operasi 3 V – 12 V
Kecepatan 300 rpm
Kuat arus 420 mA
Perbandingan gear 1 : 28
Torsi 7.2 kg cm 3.5 Rangkaian LCD 16 x 2
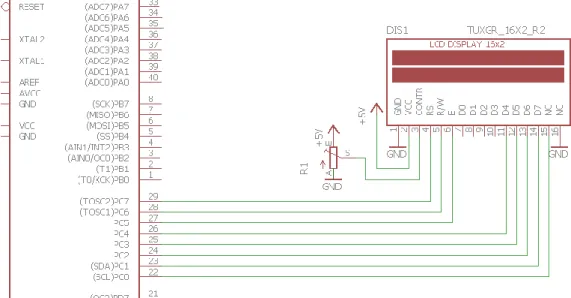
Display yang digunakan adalah LCD (Liquid Crystal Display) 16 x 2. Untuk blok ini tidak ada komponen tambahan karena mikrokontroler dapat memberi data langsung ke LCD, pada LCD sudah terdapat driver untuk mengubah data ASCII output mikrokontroler menjadi tampilan karakter. Gambar 3.3 berikut merupakan gambar rangkaian LCD yang dihubungkan ke mikrokontroler.
Gambar 3.4 Rangkaian LCD 16 x 2
Dari gambar 3.4 rangkaian ini terhubung ke PC.0 sampai PC.7, yang merupakan pin I/O dua arah dan pin fungsi khusus, yaitu sebagai Timer/Counter, komperator analog dan SPI mempunyai fungsi khusus sebagai pengiriman data secara serial.
Sehingga nilai yang akan tampil pada LCD display akan dapat dikendalikan oleh Mikrokontroller ATMega8535.
Spesifikasi LCD :
Tegangan operasi 3V DC
Dimensi modul 80 x 36 x 12 mm
Dimensi layar tampilan64.5 mm x 16 mm
Suhu kerja 0C – 50C
3.6 Rangkaian USB to TTL – RS232 Conventer PL2303HX UART
Gambar 3.5 Rangkaian USB to TTL
Dari gambar 3.5 rangkaian ini terhubung ke PD.0 dan PD.1 yang merupakan pin I/O dua arah dan pin fungsi khusus, yaitu sebagai komparator analog, interrupt external serta komunikasi serial. Sehingga data dapat di tampilkan ke PC.
Spesifikasi :
Tegangan masukan 4 V – 4.5 V
Tegangan keluaran 1.5 – 3.5 V
Kuat arus 75 mA
Dimensi 43 x 20 x 14 mm
Suhu kerja -40C – 85 C
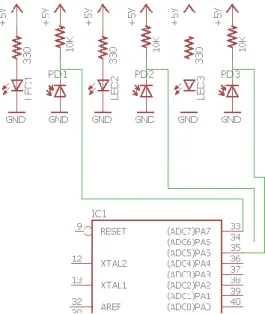
3.7 Rangkaian Sensor Dioda Laser dan Photodioda
Gambar 3.6 Rangkaian Sensor Laser dan Photodioda
Dari gambar 3.6 diatas, Rangkaian Photodioda digunakan sebagai penangkap gelombang cahaya yang dipancarkan oleh Laser. Laser yag digunakan memiliki spesifikasi:
Panjang gelombang 650 nm (panjang gelombang merah)
Diameter kepala 6 mm
Tegangan input 3V DC
Mengirimkan tegangan 58mW
Umur pakai >1000 jam
Arus input <40 mA
Suhu kerja -36 – 65 C
Besarnya tegangan atau arus listrik yang dihasilkan oleh photodioda tergantung halangan yang dilakukan oleh buah yang melewati pancaran sinar laser. Photodioda ini digunakan untuk mendeteksi jumlah buah dan ukuran buah untuk dapat dipisah.
Intensitas cahaya yang diterima photodioda akan dikonversi menjadi sinyal tegangan.
3.8Rangkaian Lengkap
Berdasarkan uraian-uraian yang telah diterangkan pada bagian sebelumnya, maka dibuat rangkaian lengkap dari peralatan. Adapun rangkaian lengkap dari perancangan sistem ini dapat dilihat pada gambar 3.7 berikut ini:
Gambar 3.7 Rangkaian Lengkap
3.7 Diagram alir (FLOWCHART)
START
INISIALISASI
KONVEYOR AKTIF
IF S1 = 1 S2 = 0 S3 = 0
IF S1 = 1 S2 = 1 S3 = 0
IF S1 = 1 S2 = 1 S3 = 1
COUNTER +1
COUNTER +1
COUNTER +1
SERVO KANAN AKTIF (BUAH KECIL)
SERVO KIRI AKTIF
(BUAH SEDANG) PC
SELESAI
YES
NO
YES YES
NO
SERVO KANAN DAN KIRI TIDAK AKTIF
(BUAH BESAR)
DISPLAY
Keterangan :
Cara kerja alat di mulai dengan start kemudian melakukan inisialisasi dan dilanjutkan dengan pembacaan keadaan sensor, selanjutnya pembacaan dan prnjumlahan sampel nilai atau hasil pendeteksian ini akan dikirim ke mikrokontroller ATMega 8535untuk selanjutnya menggerakan motor servo untuk memilah buah dan data ditampilkan di LCD dan PC dengan tampilan jumlah buah kecil, sedang, besar dan total jumlah buah.
BAB 4
PENGUJIAN ALAT DAN PROGRAM
4.1. Pengujian rangkaian sensor laser
Pengujian dilakukan dengan mendeteksi buah yang melewati sensor, buah sudah divariasikan dalam ukuran kecil, sedang, dan besar yang kemudian mendeteksi ukurannya yang dilakukan oleh sensor laser. Adapun program yang diisikan ke mikrokontroller untuk mendeteksi buah yang dilakukan oleh sensor laser adalah sebagai berikut:
void setup() { }
Void loop(){
Int sensor1=analogRead(A2);
Int sensor2=analogRead(A1);
Int sensor3=analogRead(A0);
float volt1 = sensor1*0.004887;
float volt2 = sensor2*0.004887;
float volt3 = sensor3*0.004887;
Serial.print(volt1);
Serial.print(" ");
Serial.print(volt1);
Serial.print(" ");
Serial.println(volt1);
}
Berikut data pengujian tegangan output sensor pada buah berjalan yang ditampilkan pada tebel 4.1.
Tabel 4.1. Pengujian Tegangan Output Sensor pada Buah Berjalan
Ukuran buah Sensor 1 Sensor 2 Sensor 3
Besar 4.98 V 4.98 V 4.98 V
Sedang 4.97 V 4.97 V 40.5 mV
Kecil 4.96 V 53.2 mV 40.6 mV
Spesifikasi ukuran buah jeruk yang diuji (Tinggi x Diameter) : Buah Kecil : 3 – 4 cm x 4 – 5 cm Buah Sedang : 4.5 – 5.5 cm x 6 – 7 cm Buah Besar : ≥ 6 cm x 7.5 – 9 cm Spesifikasi jarak ketinggian sensor :
Sensor 1 = 3 cm Sensor 2 = 4.5 cm Sensor 3 = 6 cm
4.2.Pengujian Rangkaian LCD
Bagian ini hanya terdiri dari sebuah LCD dot matriks 2 x 16 karakter yang berfungsi sebagai tampilan hasil pengukuran dan tampilan dari beberapa keterangan. LCD dihubungkan langsung ke Port C dari mikrokontroler yang berfungsi mengirimkan data hasil pengolahan untuk ditampilkan dalam bentuk alfabet dan numerik pada LCD.
Adapun program yang diisikan ke mikrokontroller untuk menampilkan karakter pada display LCD adalah sebagai berikut:
#include <LiquidCrystal.h>
// initialize the library by associating any needed LCD interface pin // with the arduino pin number it is connected to
const int rs = 23, en = 21, d4 = 20, d5 = 19, d6 = 18, d7 = 17;
LiquidCrystal lcd(rs, en, d4, d5, d6, d7);
void setup() {
pinMode(22,OUTPUT);digitalWrite(22,LOW);
pinMode(16,OUTPUT);digitalWrite(16,HIGH);
// set up the LCD's number of columns and rows:
lcd.begin(16, 2);
// Print a message to the LCD.
lcd.print("hello, world!");
}
void loop() {
// set the cursor to column 0, line 1
// (note: line 1 is the second row, since counting begins with 0):
lcd.setCursor(0, 1);
// print the number of seconds since reset:
lcd.print(millis() / 1000);
}
Berikut data pengujian tegangan output LCD alat yang ditampilkan pada tebel 4.2.
Tebel 4.2. Pengujian LCD
Pin Tegangan (V)
VSS 0
VDD 4.99
Vo 1.08
Rs 4.70
Rw 6.4 x 10−3
E 17.3 x 10−3
D0 4.98
D1 4.98
D2 4.98
D3 4.98
D4 310 x 10−3
D5 233 x 10−3
D6 135 x 10−3
D7 125 x 10−3
A 4.55
K 0
4.3. Pengujian Rangkaian Power Supply
Pada pengujian yang dilakukan tegangan masukan dari PLN sebesar 220 Volt AC kemudian masuk ke trafo diubah menjadi 12 Volt AC, kemudian di searahkan ke Dioda sebesar 12 Volt DC. Setelah dilakukan pengukuran maka diperoleh besarnya tegangan keluaran sebesar 5 volt. Dengan begitu dapat dipastikan apakah terjadi kesalahan terhadap rangkaian atau tidak. Jika diukur, hasil dari keluaran tegangan tidak murni sebesar +5 Volt Hasil tersebut dikarenakan beberapa faktor, diantaranya kualitas dari tiap-tiap komponen yang digunakan nilainya tidak murni. Selain itu, tegangan jala-jala listrik yang digunakan tidak stabil. Berikut data tegangan output power supply yang ditampilkan pada tabel 4.3.
Tebel 4.3. Pengujian power supply ATMega 8535
Input Output
12 volt 5.02 volt
4.4.Pengujian Rangkaian Motor Servo
Pada pengujian ini dilakukan pengujian pergerakan motor sesuai sudut yang diinginkan untuk memisah buah berdasarkan ukurannya. Pada program di bawah ini servo
#include <Servo.h>
Servo myservo;
int pos = 0;
void setup() {
myservo.attach(2);
myservo1. attach(3);
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) { myservo.write(pos);
myservo1.write(pos);
delay(15);
}
for (pos = 180; pos >= 0; pos -= 1) { myservo.write(pos);
myservo1.write(pos);
delay(15);
} }
Berikut data tegangan output motor servo yang ditampilkan pada tabel 4.4.
Tabel 4.4 Pengujian Tegangan Motor Servo
Motor Servo On Off
Servo 1 290 mV 215 mV
Servo 2 509 mV 598 mV
4.5. Pengujian Rangkaian Keseluruhan
Pengujian keseluruhan Sistem dilakukan untuk mengetahui apakah seluruh rangkaian dapat berjalan dengan baik. Pada awalnya laser akan memancarkan sinarnya ke objek yang selanjutnya fotodioda akan mendeteksi ukuran buah yang telah divariasikan besarnya. Selanjutnya hasil dari pembacaan alat ini akan ditampilkan di lcd dan PC.
Berikut data Pengujian penghitung dan pemisah barang berdasarkan ukuran yang ditampilkan pada tabel 4.5.
Tabel 4.5. Pengujian penghitung dan pemisah barang berdasarkan ukuran
Pada pengujian ini percobaan dilakukan duapuluh kali percobaan untuk mengetahui ketepatan perhitungan. Untuk mengetahui ketepatan sensor dalam pendeteksian maka dilakukan pengujian dengan cara memberikan ukuran yang berbeda. Untuk buah dengan ukuran yang berbeda dilakukan duapuluh kali pengujian. Pengujian ini bertujuan untuk mengetahui seberapa jauh jarak jangkauan sensor.
No
Sensor laser Ukuran Buah
Plang Barang
Tampilan
S1 S2 S3 Kecil Sedang Besar Total
1 1 0 0 Kecil Aktif 1 1
2 1 1 0 Sedang Aktif 1 2
3 1 1 1 Besar Tidak aktif 1 3
4 1 0 0 Kecil Aktif 2 4
5 1 1 0 Sedang Aktif 2 5
6 1 1 1 Besar Tidak aktif 2 6
7 1 1 0 Sedang Aktif 3 7
8 1 0 0 Kecil Aktif 3 8
9 1 1 0 Sedang Aktif 4 9
10 1 1 0 Sedang Aktif 5 10
11 1 1 1 Besar Tidak aktif 3 11
12 1 1 1 Besar Tidak aktif 4 12
13 1 1 1 Besar Tidak aktif 5 13
14 1 0 0 Kecil Aktif 4 14
15 1 0 0 Kecil Aktif 5 15
16 1 1 0 Sedang Aktif 6 16
17 1 1 1 Besar Tidak aktif 6 17
18 1 1 0 Sedang Aktif 7 18
19 1 0 0 Kecil Aktif 6 19
20 1 0 0 Kecil Aktif 7 20
4.7 Pembahasan
Penelitian yang telah dilakukan adalah bertujuan untuk mengetahui dan memahami tentang penghitungan dan pemisah buah berdasarkan ukuran menggunakan laser.
Pengukuran tingkat ketepatan yang dilakukan adalah dengan menggunakan sampel buah jeruk yang telah divariasikan ukurannya. Prinsip kerja dari sensor adalah untuk menghitung jumlah dan mendeteksi ukurannya dengan memanfaatkan sinar laser.
Laser pada sensor akan memancarkan cahaya pada buah sampel dan cahaya tersebut akan dipantulkan bila mengenai buah yang melewatinya atau ditangkap oleh fotodioda jika tidak mengenai sampel buah yang ditempatkan berhadapan pada posisi laser.Sensor ditempatkan pada 3 posisi untuk mengidentifikasikan buah berdasarkan ukurannya yaitu kecil, sedang, dan besar. Cahaya yang memantul sampel akan mengidentifikasikan jumlah dan ukuran buah yang akan ditampilkan pada LCD dan PC.
Seperti yang kita ketahui, ada beberapa alat untuk menghitung dan mengidentifikasi ukuran buah yang bisa digunakan. Pada penelitian ini, sensor yang digunakan sensor laser. Sensor ini memiliki beberapa keunggulan yaitu :
Ukurannya yang kecil yaitu kurang dari 1 mm dengan beratnya kurang dari 1 gram dan bentuk yang simpel.
Sensor memiliki cahaya yang fokus sehingga dapat melakukan pembacaan dengan tingkat akurasi yang tinggi.
Harga sensor sangat murah dan mudah ditemukan
Membutuhkan arus listrik, tegangan dan daya yang rendah yaitu antara 3 volt – 12 volt DC.
Jadi dengan ukuran sensor yang simple, pengukuran penjumlahan dan mengidentifikasi ukuran buah bisa dilakukan dengan akurat, dengan menyesuaikan ukuran sensor dengan ukuran konveyor, sehingga sensor hanya mendeteksi sampel tanpa yang berjalan pada konveyor.
Setelah dilakukan penelitian, dari hasil data yang diperoleh, bisa dilihat dari tabel pengujian bahwa data yang dihasilkan oleh sensor menghasilkan pengukuran yang akurat, kesalahan pengukuran berkisar 5%. Pengukuran dilakukan disaat yang bersamaan pada variasi buah kecil, sedang, dan besar juga sampel yang sama.
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil perancangan alat hingga pengujian dan pembahasan sistem maka penulis dapat menarik kesimpulan, antara lain :
1. Telah berhasil dirancang sebuah alat yang dapat menghitung dan memilah buah berdasarkan ukuran menggunakan sensor laser dan fotodioda dengan menggunakan mikrokontroler ATMega 8535. Alat ini bekerja mendeteksi ukuran buah dan menghitung jumlah buah sampel dengan memanfaatkan laser dan sensor fotodioda sebagai sensor cahayanya dan motor servo yang akan memisah buah berdasarkan ukuran.
2. Prinsip kerja alat pemilah buah menggunakan laser dan fotodioda berbasis mikrokontroler yaitu saat buah berjalan diatas belt konveyor dan melewati pancaran sinar laser, jika hanya mengenai laser 1 maka mikrokontroler akan membaca buah berukuran kecil dan plang servo kanan terbuka, jika buah memantulkan sinar laser 1 dan 2 maka dibaca buah berukuran sedang dan plang servo kiri terbuka, jika buah menutupi ketiga sinar laser maka buah berukuran besar. Kemampuan sensor dalam mengukur ketepatan memilah buah bias dikatakan akurat. Ini dapat dilihat dari tabel yang menunjukkan keakuratan pembacaan pada sensor.
3. Prinsip kerja alat penghitung jumlah buah menggunakan laser dan fotodioda berbasis mikrokontroler yaitu setiap buah yang melewati dan terdeteksi oleh sensor maka buah otomatis terhitung jumlahnya, jika buah kecil terdeteksi maka jumlah buah kecil akan beambah jumlah, begitu juga untuk ukuran buah sedang dan besar. Jadi yang tertampil pada LCD dan PC yaitu jumlah buah kecil, sedang, besar , dan total keseluruhan buah.
5.2 Saran
Setelah melakukan penelitian, diperoleh beberapa hal yang dapat dijadikan saran untuk dilakukan penelitian lebih lanjut yaitu: Untuk pengembangan
lebih lanjut untuk variasi sampelnya juga lebih diperbanyak lagi, dan ukuran konveyor lebih diperbesar sehingga peletakan sensornya dapat lebih baik dan pembacaan sensor lebih akurat. Sebaiknya ditambahi alat mengukur berat pada buah, sehingga dapat langsung menampilkan harga buah tersebut.
DAFTAR PUSTAKA
Bejo, Agus. 2008. C&AVR Rahasia Kemudahan Bahasa C dalam Mikrokontroller.Yogyakarta : Graha Ilmu
Bishop, Owen.2002. Dasar-dasar Elektronika.Jakarta:Penerbit Erlangga.
Budiharo, Widodo. 2005. Perancangan Sistem dan Aplikasi Mikrokontroler. Elex Media Komputindo.Jakarta.
Daryanto, Drs. 2008. Pengetahuan Teknik Elektronika. Jakarta : Bumi aksara Knoll, F.G. 2010. Deteksi Radiasi Dan Pengukuran. Wiley Hoboken NJ. ISBN
978-0-470-13148-0.
Leach, D.P., dan A.P. Malvino, 1994, Prinsip-prinsip dan Penerapan Digital, Erlangga, Jakarta.
Putra, A.E., 2004, Belajar Mikrokontroler ATMEGA 8535 (Teori dan Aplikasi), Gava Media, Yogyakarta.
Setiawan, 2011. 20 Aplikasi Mikrokontroler ATMega 8535 & ATMega 16 Menggunakan Bascom-AVR. Andi. Yogyakarta.
Suhata.2005.Aplikasi Mikrokontroler Sebagai Pengendali Peralatan Elektronik.
Jakarta: Penerbit Elex Media Komputindo
Syahwil, Muhammad, 2013. Panduan Mudah Simulasi & Praktek Mikrokontroler Arduino, Penerbit Andi Yogyakarta.
Wardhana, Lingga. 2011. Belajar Sendiri Mikrokontroler AVR Seri ATMega8535 Simulasi, Hardware, dan Aplikasi. Yogyakarta: Penerbit Andi Yogyakarta Zuhal, 1988. Dasar Teknik Tenaga Listrik dan Elektronika Daya, Gramedia.
Jakarta
Datasheet Mikrokontroler ATMega 8535.
(http://id.wikipedia.org/wiki/Atmel_AVR)
http://elektronika-dasar.web.id/aplikasi-photo-dioda/
http://www.alldatasheet.com/datasheetpdf/pdf/164169/ATMEGA8535.html
Lampiran
Gambar 1. Tampilan pada LCD
Gambar 2. Pengujian Power Supply
Gambar 3. Pengujian keselurah alat
Gambar 4. Pengujian Motor Servo
Tampilan PC pada Pengujian Alat
Rangkaian Lengkap
Program Lengkap
#include <LiquidCrystal.h>
#include <Servo.h>
Servo servo_kanan;
Servo servo_kiri;
int sensor1;
int sensor2;
int sensor3;
unsigned long previousMillis = 0;
const long interval = 300;
const int rs = 23, en = 21, d4 = 20, d5 = 19, d6 = 18, d7
= 17;
LiquidCrystallcd(rs, en, d4, d5, d6, d7);
int jumlah_kecil;
int jumlah_sedang;
int jumlah_besar;
int jumlah;
void setup() {
Serial.begin(38400);
pinMode(22,OUTPUT);
digitalWrite(22,LOW);
pinMode(16,OUTPUT);
digitalWrite(16,HIGH);
lcd.begin(16, 2);
lcd.print(" Welcome ");
delay(1000);
servo_kanan.attach(2);
servo_kiri.attach(3);
lcd.clear();
servo_kanan.write(30);
servo_kiri.write(180);
}
void loop() {
unsigned long currentMillis = millis();
if (currentMillis - previousMillis>= interval) { previousMillis = currentMillis;
sensor1=analogRead(A2);
sensor2=analogRead(A1);
sensor3=analogRead(A0);
}
delay(100);
if (sensor1 > 500 && sensor2 < 500 && sensor3 < 500) {
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" buah Kecil ");
lcd.setCursor(0,1);
lcd.print(" Terdeteksi ");
servo_kanan.write(60);
delay(1000);
jumlah_kecil++;
jumlah=jumlah_besar+jumlah_sedang+jumlah_kecil;
Serial.print("DATA,TIME,");
Serial.print(jumlah_kecil);
Serial.print(",");
Serial.print(jumlah_sedang);
Serial.print(",");
Serial.print(jumlah_besar);
Serial.print(",");
Serial.println(jumlah);
}
else if (sensor1 > 500 && sensor2 > 500 && sensor3 <
500) {
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" buahsedang ");
lcd.setCursor(0,1);
lcd.print(" Terdeteksi ");
servo_kiri.write(145);
delay(1000);
jumlah_sedang++;
jumlah=jumlah_besar+jumlah_sedang+jumlah_kecil;
Serial.print("DATA,TIME,");
Serial.print(jumlah_kecil);
Serial.print(",");
Serial.print(jumlah_sedang);
Serial.print(",");
Serial.print(jumlah_besar);
Serial.print(",");
Serial.println(jumlah);
}
else if (sensor1 > 500 && sensor2 > 500 && sensor3 >
500) {
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" buahBesar ");
lcd.setCursor(0,1);
lcd.print(" Terdeteksi ");
servo_kanan.write(30);
servo_kiri.write(180);
delay(1000);
jumlah_besar++;
jumlah=jumlah_besar+jumlah_sedang+jumlah_kecil;
Serial.print("DATA,TIME,");
Serial.print(jumlah_kecil);
Serial.print(",");
Serial.print(jumlah_sedang);
Serial.print(",");
Serial.print(jumlah_besar);
Serial.print(",");
Serial.println(jumlah);
}
else {
servo_kanan.write(30);
servo_kiri.write(180);
}
lcd.clear();
lcd.clear();
lcd.setCursor(0,0);
lcd.print("kcl:");
lcd.print(jumlah_kecil);
lcd.setCursor(8,0);
lcd.print("sdg:");
lcd.print(jumlah_sedang);
lcd.setCursor(0,1);
lcd.print("bsr:");
lcd.print(jumlah_besar);
lcd.setCursor(8,1);
lcd.print("jmlh:");
lcd.print(jumlah);
}