DETEKSI KABEL LISTRIK BAWAH TANAH DENGAN OTOMATA
Yumarsono Muhyi, ST.
Dosen STMIK Indonesia, Jl. Kyai Tapa No. 216A, Grogol Jakarta Barat
Abstrak
Kabel listrik yang umum diketahui masyarakat adalah pada tiang-tiang listrik. Namun pada kenyataannya, kebanyakan kabel itu tidak terlihat dan terpendam, baik itu di dalam tanah atau di dalam dinding beton. Masalah akan timbul ketika tanah atau dinding itu akan dilakukan pekerjaan, sehingga perlu diketahui posisi kedalaman kabel tersebut. Artikel ini akan mengetengahkan sebuah metode otomata secara aplikasi komputer dalam melacak keberadaan kabel listrik bawah tanah. Metode ini diimplementasikan menjadi perangkat lunak, sehingga tidak lagi sangat membutuhkan kepakaran seorang teknik untuk melacak dan menganalisa keberadaan kabel.
Kata Kunci : Kabel, Listrik, Otomata, Otomata, Posisi, Kedalaman, Bawah Tanah, Neural Network
1. Pendahuluan
1.1. Latar Belakang
Artikel ini merupakan rangkuman atas pengerjaan sebuah aplikasi yang dibutuhkan untuk melacak keberadaan kabel listrik di bawah tanah. Kabel listrik ini harus diketahui sedemikian rupa, sehingga tanpa menggali terlebih dahulu, dapat diketahui kedalaman kabel listrik dan juga ukurannya. Meskipun dari awal memang aplikasi ini tidak diharapkan agar mutlak kebenarannya, tetapi keluaran dari aplikasi harus cukup presisi, sehingga dapat dijadikan acuan awal untuk mengetahui perkiraan kedalaman dan ukuran kabel listrik di bawah tanah.
1.2. Tujuan Penulisan
Artikel ini bertujuan memaparkan sebuah metode dan pemodelan otomata yang dapat diterapkan untuk mencari lokasi keberadaan kabel listrik di bawah tanah. Artikel ini dapat dijadikan sebagai acuan untuk pemodelan-pemodelan sistem yang lain, yang memiliki karakteristik yang serupa.
Artikel ini juga bertujuan memberikan gambaran umum secara teori dan praktis tentang pemodelan sistem ini, di mana di lapangan kedua hal itu tidak dapat dipisahkan. Banyak hal-hal praktis yang sangat mempengaruhi dalam pemodelan sistem, bahkan sampai ke dalam pembuatan dan implementasi aplikasi komputernya.
2. Bahan dan Metode
Metode yang dilakukan dalam melakukan pembuatan aplikasi ini ada beberapa tahapan. Tahapan-tahapan tersebut adalah:
1. Studi literatur
2. Praktik pengoperasian alat 3. Pengambilan sampel data 4. Pemodelan sistem 5. Pengkodean 6. Simulasi 7. Uji lapangan.
Adapun bahan-bahan yang dikaji dalam studi literatur cukup banyak, dan terangkum dalam beberapa kategori keilmuan, yaitu:
1. Seismik
2. Komputasi numerik 3. Neural network.
Porsi terbesar dalam melakukan penelitian dan pekerjaan ini adalah dalam melakukan pemodelan sistem. Sistem harus dimodelkan dengan cukup baik, sehingga dapat merangkum antara teori dan kenyataan praktis di lapangan. Banyak faktor di lapangan yang pada akhirnya masuk ke dalam pemodelan sistem, dan masuk ke dalam algoritma aplikasi komputer yang dibuat.
3. Bahasan
3.1 Landasan Teori
Hal yang paling mendasar dalam penelitian dan pekerjaan ini adalah masalah gelombang. Gelombang per definisi adalah sebuah gangguan yang merambat dalam ruang dan waktu. Penjelasan matematis dan detail tentang gelombang tidak diberikan dalam artikel ini.
Gelombang Elektromagnetik
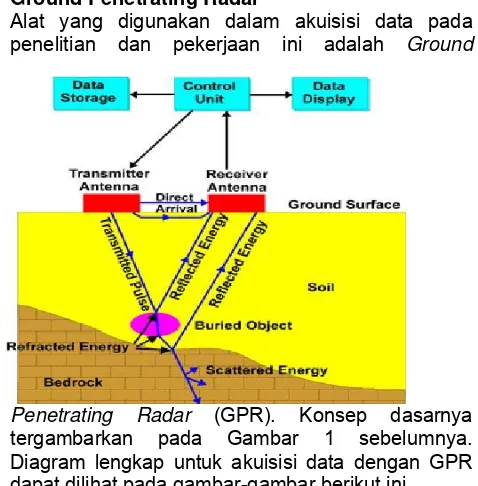
Gelombang elektromagnetik digunakan dalam penelitian ini, untuk akuisisi data secara elektromagnetik. Secara sederhana, proses akuisisi data secara elektromagnetik untuk pelacakan kabel listrik dalam tanah dapat digambarkan dalam Gambar 1 berikut ini.
Gambar 1. Konsep Akuisisi Data
Sinyal impuls elektromagnetik dipancarkan dari sebuah pemancar dari permukaan tanah ke tanah bumi. Ketika sinyal impuls tadi itu bertumbu dengan objek lain, dalam hal ini adalah kabel listrik, sinyal itu memantul dan ditangkap oleh penerima. Pada Gambar 1 di atas, objek pemantul sinyal implus itu digambarkan dengan lapisan batuan.
Sinyal yang digunakan adalah sinyal impuls elektromagnetik, yang berupa sebuah gelombang sinusiod sempurna. Sinyal impuls ini tepat satu siklus (cycle) gelombang sinusiod sempurna, sebagaimana terlihat pada Gambar 1.
Gelombang Seismik
Dalam menganalisa lapisan-lapisan bumi, atau objek-objek lain yang ada di bawah permukaan bumi, diperlukan ilmu seismologi. Seismologi adalah ilmu yang mempelajari perambatan gelombang di bumi, baik itu di permukaan atau di dalam bumi.
Model akuisisi data secara prinsip sama dengan Gambar 1. Tetapi, di dalam seismik yang dasar, impuls yang digunakan adalah ledakan dan bukan gelombang elektromagnetik. Sehingga, dalam menganalisa secara seismik, ada beberapa jenis gelombang yang timbul, yaitu gelombang longitudinal, gelombang transversal, gelombang permukaan, dan gelombang badan (body wave).
Masing-masing memiliki analisa dan konsep tersendiri, yang tidak dibahas pada artikel ini.
Dalam penelitian dan pekerjaan ini, hanya gelombang longitudinal yang relevan dalam pembahasan. Gelombang longitudinal adalah gelombang yang arah getarannya searah dengan arah rambat gelombang itu sendiri. Analogi sederhana dari gelombang longitudinal adalah getaran yang terjadi pada pegas.
Ground Penetrating Radar
Alat yang digunakan dalam akuisisi data pada penelitian dan pekerjaan ini adalah Ground
Penetrating Radar (GPR). Konsep dasarnya tergambarkan pada Gambar 1 sebelumnya. Diagram lengkap untuk akuisisi data dengan GPR dapat dilihat pada gambar-gambar berikut ini.
Gambar 2. Akuisisi Data GPR
GPR ini secara berkala memancarkan impuls elektromagnetik ke bawah permukaan bumi, dan pantulannya ditangkap oleh antena penerima. Hasil tangkapan ini direkam oleh GPR, dan keluarannya berupa gambar (image). Penalaan (scanning) kabel listrik harus dilakukan memotong atau melintang dari arah kabel listriknya.
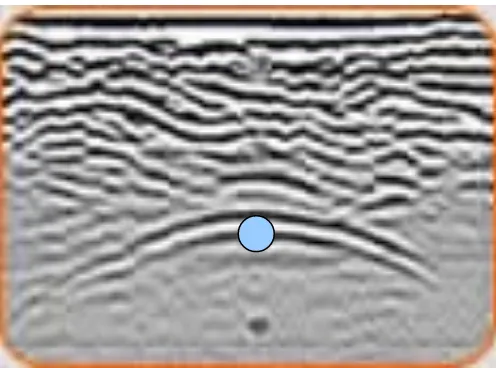
Gambar 3. Gambar Keluaran GPR
Sumbu horizontal adalah sampling impuls yang dipancarkan. Sumbu vertikal adalah jarak kedalaman atau waktu tempuh sinyal impuls dari pemancar ke penerima. GPR memiliki keterbatasan kehandalan operasi hanya sampai beberapa meter di bawah permukaan.
Semakin konduktif objek yang ditumbu, maka akan semakin jelas sinyal yang ditangkap. Kabel listrik adalah tembaga yang berkonduktivitas sangat baik, sehingga akan memberikan pola yang jelas pada gambar keluaran GPR.
Sinyal terang menggambarkan tegangan positif, sementara warna gelap menggambarkan tegangan negatif. Warna abu-abu menggambarkan tegangan mendekati nol. Dari Gambar 3 dapat terlihat dengan jelas pola-pola warna tersebut.
3.2. Pemodelan
Objek yang akan menjadi target penalaan dengan GPR adalah kabel listrik. Cara penalaannya harus melintang dari arah kabelnya, dan hanya dengan cara begini penalaan dilakukan. Apabila dibuat penampang melintang dari posisi kabel di bawah tanah, maka gambarnya akan seperti pada Gambar 4.
Gambar 4. Penampang Melintang Kabel Listrik
Dari gambar dapat dimodelkan sebuah garis yang merupakan lintasan sinyal impuls dari antena pemancar T di koordinat (xt, yt), bertumbu pada sisi kabel di titik P koordinat (xp, yp), dan memantul ke antena penerima R di titik (xr, yr). α adalah sudut bidang pantul, dan R di tengah-tengah kabel adalah jari-jari kabel. b adalah kedalaman kabel dari permukaan tanah.
Dari model ini dapat dibuat rumus:
(
)
2 22 2
2
cos
sin
2
cos
2
Rb
R
R
x
b
x
b
b
R
S
r
r
+
+
+
−
+
−
+
=
α
α
α
dimana S adalah panjang lintasan. Rumus di atas menjadikan xr sebagai referensi utamanya.
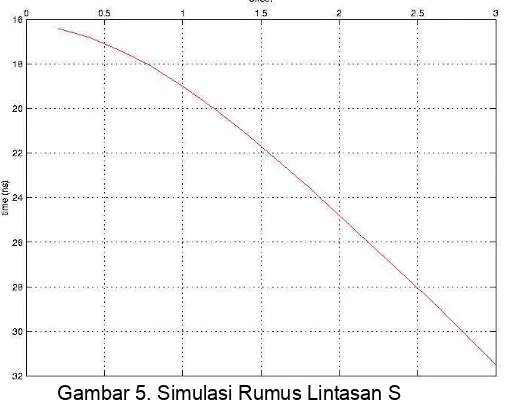
Dari model dan rumus di atas, dapat disimulasikan sebuah lintasan berupa grafik garis untuk sejumlah sampling x (atau xr) tertentu. Gambar 5 berikut ini menggambarkan simulasi tersebut. Pola gambarnya merupakan parabola terbalik, dengan kelengkungan tertentu.
Sumbu horizontal menggambarkan nilai x atau xr atau sampling dari GPR. Sumbu vertikal menggambarkan waktu tempuh lintasan S, dari impuls yang dipancarkan antena T dan diterima antena R. Sumbu vertikal ini bisa diartikan sebagai kedalaman, dengan menggunakan rumus:
(
)
V
x
S
t
r,
α
=
dimana V adalah kecepatan rambat tanah rata-rata, yang nilainya ditentukan menurut standar nilai tertentu.
Gambar 5. Simulasi Rumus Lintasan S
Parameter-parameter tersebut adalah R atau radius, b atau kedalaman. Semakin besar nilai b atau semakin kecil nilai R, maka akan semakin runcing bentuk parabolanya. Pola kelengkungan ini yang akan digunakan dalam otomata.
3.3. Otomata
Sesuai tujuan awal dari penelitian ini, bahwa ingin dicari suatu cara agar dapat mencari kedalaman dan ketebalan atau radius dari kabel. Input yang didapatkan dari alat GPR adalah file gambar hasil penalaan, dan parameter-parameter teknis dari alat saat melakukan penalaan, yaitu:
• jumlah cuplik atau sampling penerimaan sinyal impuls
• waktu antar cuplik atau sampling penerimaan sinyal impuls
• jumlah trace atau sampling pengiriman sinyal impuls
• interval pergeseran tiap sampling
• frekuensi sinyal impuls.
Ide dasar dari konsep otomata yang diterapkan adalah, bahwa dengan mengetahui atau melacak pola difraksi yang didapat dari file gambar, maka dapat diketahui pula kedalaman b dan jari-jari R dari kabel listriknya. Hal ini didapat dari pemodelan di atas, yaitu bahwa dengan melacak keruncingan dari difraksi, maka akan didapat perkiraan kedalaman dan jari-jari dari kabel listriknya.
Setelah menelaah dan mencoba beberapa algoritma neural network yang fundamental dan memungkinkan untuk melakukan pelacakan pola keruncingan difraksi, maka yang gunakan adalah Back-Propagation Training (BPT). Penulis tidak membahas secara mendetail rumus-rumus dan perhitungannya, namun penulis akan memberikan langkah-langkah yang ditempuh dalam perhitungannya.
Langkah-langkah yang dilakukan dalam otomata ini adalah:
1. Membuat gambar contoh untuk training BPT.
Gambar contoh ini merupakan sinyal implus buatan yang sempurna, dan diberikan redaman agar menyerupai redaman sinyal impuls dari tanah. Gambar ini dibuat dengan semua parameter tepat sama dengan parameter-parameter dari gambar keluaran GPR.
Gambar contoh dibuat dengan ukuran relatif untuk beberapa jenis kedalaman dan
jari-jari kabel yang sudah tertentu. Kedalaman dibuat menurut jenjang yang linier, sementara jari-jari kabel disesuaikan dengan sejumlah kabel listrik yang standar ada di lapangan, dan jumlahnya hanya sedikit.
Gambar contoh dibuat relatif, sehingga mencukupi untuk menangkap lengkungan puncak persamaan parabolanya, dan membuang bagian yang di luar itu, karena sudah tidak relevan dengan kondisi gambar keluara GPR. Seperti terlihat di Gambar 1, bahwa gambar “subfloor feature” hanya memiliki puncak parabola saja, dan tidak memiliki “ekor” yang panjang.
2. Gambar-gambar contoh dimasukkan ke dalam sistem.
Gambar dimasukkan untuk training weights dari arsitektur jaringan sarafnya. Sejumlah batasan-batasan diberikan untuk mecegah waktu training terlalu lama, dan agar tidak terlalu tegas dalam menentukan weights dari jaringan saraf. Gambar keluaran dari GPR umumnya memiliki noise cukup banyak dan tidak ideal.
3. Pengkondisian gambar hasil GPR.
Sebelum ditala oleh jaringan saraf BPT, gambar keluaran dari GPR perlu dikondisikan, agar cukup mendekati gambar yang baik mutunya. Setelah beberapa eksperimen, maka proses-proses yang dilakukan dalam pengkondisian itu adalah:
1. Background Removal 2. DC Signal Removal 3. Automatic Gain 4. BW Filtering 5. FFT Filtering 6. Normalization.
4. Penalaan gambar GPR dengan BPT yang sudah siap.
5. Clustering atau pengelompokan hasil.
Kumpulan-kumpulan dari banyak temuan tadi dilakukan proses pengelompokan atau clustering, yang juga menggunakan metode otomata, yaitu Kohonen (Self-Organizing Map) Algorithm.
6. Hasil akhir.
Setelah semua proses dilalui, maka akan didapatkan perkiraan temuan-temuan kabel akhir. Umumnya didapat 1 sampai 3 kabel dengan berbagai ukuran di setiap pola parabola yang jelas dari gambar GPR. Kualitas penalaan kabel dari gambar GPR sangat bergantung kepada kualitas gambar GPR, semakin noisy atau tidak baik gambarnya, semakin buruk pula hasil penalaan aplikasi ini.
Gambar 6. Contoh Tampilan Hasil Penalaan
5. Penutup
Hasil yang diperoleh dari penelitian dan pekerjaan ini belum maksimal, namun telah memberikan gambaran perkiraan yang cukup baik. Dari beberapa kali pengambilan data dan pemrosesan keluaran gambar GPR, sekitar lebih dari 60% telah mencapai tingkat akurasi yang diharapkan.
4. Implementasi
Penelitian dan pekerjaan ini telah dibuat dalam bentuk terkompilasi, menggunakan Borland C++. Aplikasi ini masih semi manual, dalam arti tidak bisa langsung menangkap data keluaran dari GPR dan langsung menganalisanya, karena beberapa keterbatasan teknis masalah interkonesi dari dan ke GPR melalui paralel port. Juga terkendala karena masalah format data yang masih harus diproses oleh GPR itu sendiri sebelum diolah oleh aplikasi ini.
Penelitian ini masih tahap awal, dan masih ditemukan beberapa kendala praktis di lapangan. Untuk itu, masih membutuhkan beberapa penelitian lagi agar dapat mencapai kesempurnaan. Hal yang perlu diperbaiki terutama adalah dalam penggunaan algoritma-algoritma otomata yang akan digunakan, karena itu akan sangat menentukan hasil penalaan kabel listriknya.
Namun aplikasi ini telah dapat melacak file gambar keluaran dari GPR yang telah sempurna, segera setelah GPR membuat file gambar keluarannya. Kemudian aplikasi ini segera menangkap file tersebut dan melakukan penalaan, memproses, dan menampilkan hasilnya.
Daftar Pustaka
Fausett, Laurene. 1994. Fundamentals of Neural Networks: Architectures, Algorithms And Applications. Prentice Hall.
Aplikasi ini memberikan penandaan pada gambar GPR, berupa titik tertentu dan dengan warna dan tertentu untuk jari-jari tertentu, sehingga lebih memudahkan untuk dilihat dengan latar belakang gambar GPR. Cara ini efektif dan ergonomis bagi pengguna, daripada menampilkan angka-angka metrik untuk kedalaman dan jari-jari kabel temuan.
Russel S. 2003. Artificial Intelligence: A Moden Approach. Prentice Hall.
Paxton, J. 2003. Introduction to Neural Networks. Lecture Notes. Montana State University.
Astutik, S. Penggunaan Ground Penetrating Radar (GPR) Sebagai Metal Detector. Jurnal ILMU DASAR, Vol.2 No. 1, 2001 : 9-16. MALA GeoScience. 1997.