SENTRA IV-29
DESAIN PENGENDALI
AIR HEATER
BERBASIS
TAKAGI-SUGENO-KANG
FUZZY CONTROLLER
Dwi Ana Ratna Wati1, Hifni Aulia Majid2
1. Universitas Islam Indonesia, Yogyakarta 2. Universitas Islam Indonesia, Yogyakarta
Kontak Person:
Dwi Ana Ratna Wati
Teknik Elektro FTI UII, Jl. Kaliurang km 14.5 Yogyakarta, 55584
Telp: 0274-895287, Fax: 0274-895007, E-mail: [email protected]
Abstrak
Air heater memiliki prinsip kerja yang sederhana, namun sistem ini memiliki sifat tidak linier pada aktuator serta model yang valid tidak mudah diperoleh. Ketiadaan model yang valid dari proses yang akan dikendalikan mengakibatkan perancangan pengendali berbasis model tidak bisa menghasilkan unjuk kerja yang baik. Pada kondisi tersebut, pengendali berbasis pengetahuan seperti Fuzzy Logic Controller(FLC) dapat menjadi solusi. Oleh karena itu, pada penelitian ini dirancang Takagi-Sugeno-Kang (TSK) Fuzzy Controller untuk mengendalikan suhu output air heater. TSK Fuzzy Controller ini menggunakan input sinyal error dan perubahan error suhu sedangkan outputnya adalah perubahan sinyal kendali, dan basis aturan terdiri atas 25 aturan yang menggambarkan metode pengendalian suhu air heater. Berdasarkan hasil pengujian, fuzzy controller yang dirancang mampu mengendalikan suhu air heater sesuai setpoint tanpa overshoot dan mampu menangani gangguan dengan respon yang cepat.
Kata kunci: air heater, fuzzy controller, pengendali suhu
Pendahuluan
Pada dunia pendidikan, air heater digunakan sebagai salah satu contoh kendali proses karena sistem ini sederhana dan mudah dipelajari [1]. Air heater juga banyak digunakan pada proses pengeringan di industri maupun sebagai pemanas udara pada rumah-rumah di negara subtropis. Agar suhu output air heater dapat dijaga sesuai nilai yang diinginkan, maka perlu dioperasikan dengan sebuah pengendali. Air heater memiliki sifat taklinier dan biasanya bekerja pada daerah yang banyak pengganggu [2]. Oleh karena itu, diperlukan pengendali yang mampu menangani kedua masalah tersebut.
Pada perancangan pengendali berbasis model, diperlukan sebuah model proses yang akan dikendalikan. Pada [1], Air Heater Lab Experiment (AHLE) diidentifikasi untuk mendapatkan model. Model tersebut digunakan pada tuning pengendali PID secara off-line. Sementara pada [2], model digunakan untuk menghitung fungsi objektif pada optimasi pengendali PID berbasis algoritma Genetik (GA). Pada kenyataannya, model umumnya tidak tersedia secara langsung dan perlu dilakukan identifikasi sistem [1], [2]. Masalah yang biasanya muncul pada identifikasi sistem adalah sulitnya memperoleh data yang lengkap, yang dapat mewakili seluruh karakteristik sistem. Akibatnya model yang diperoleh kurang valid.
IV-30 SENTRA
Pada penelitian ini, dirancang TSK FLC yang diaplikasikan pada air heater sebagai pengendali temperatur. Tujuan perancangan adalah mendapatkan respon sistem yang baik pada kondisi transisi maupun keadaan tunak serta mampu menangani gangguan atau memiliki sifat robust.
Metode Penelitian
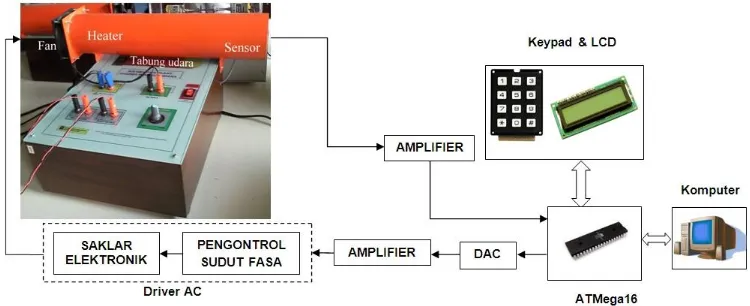
Air heater yang digunakan pada penelitian ini memiliki sebuah elemen pemanas yang diletakkan pada ujung sebuah tabung dan sebuah kipas yang meniupkan udara panas keluar dari tabung. Sebuah sensor LM35 digunakan untuk membaca temperatur udara yang keluar dari ujung tabung. Sinyal tersebut dikuatkan oleh pengondisi sinyal dan dibaca oleh mikrokontroller ATMega16 sebagai pengendali utama. Sinyal pengendali digunakan untuk mengatur daya pemanas, dikirim oleh mikrokontroller melalui Digital to Analog Converter (DAC) ke penggerak daya arus bolak-balik (AC). Keypad digunakan untuk memasukan nilai temperatur yang diinginkan (setpoint), sedangkan tampilan LCD digunakan untuk menampilkan nilai tersebut dan nilai temperatur aktual output air heater. Data temperatur output juga direkam menggunakan metode pengiriman data serial ke sebuah komputer. Diagram air heater dan sistem kendalinya ditunjukkan pada gambar 1.
Gambar 1. Diagram sistem pengendali air heater
TSK FLC yang dirancang untuk mengendalikan temperatur air heater, diimplementasikan dalam konfigurasi kendali kalang tertutup seperti ditunjukkan pada gambar 2. TSK FLC memiliki variabel input berupa error,
e
(
n
)
dan change of error,
e
(
n
)
. Error adalah perbedaan antara nilai set point (SP) dan nilai aktual atau present value (PV) temperatur air heater seperti pada (1). Sedangkan change of error adalah perubahan nilai error yang dihitung dengan persamaan (2). Output TSK FLC berupa change of control signal,
u
(
n
)
, sedangkan nilai sinyal kendaliu
(
n
)
dihitung denganGambar 2. Diagram sistem kendali kalang tertutup pada air heater berbasis TSK FLC
SENTRA IV-31
variabel input dinormalisasi pada interval [-1,1]. Oleh karena itu, sebuah prosedur normalisasi diimplementasikan pada nilai input error dan change of error sebelum nilai tersebut diolah oleh algoritma TSK FLC.
(a)
(b)
Gambar 3. Grafik fungsi keanggotaan variabel input (a) error dan (b) change of error
TSK FLC menggunakan metode inferensi sugeno. Pada metode sugeno, bagian konsekuen pada aturan bukan menggunakan nilai linguistik melainkan berupa fungsi dari variabel input. Aturan yang digunakan pada metode sugeno dituliskan pada persamaan (4) yang mana
x
1...
x
n adalah variabel input danA
1l...
A
nl adalah nilai lingusitik berupa fungsi keanggotaan fuzzy, sedangkany
l adalah nilai output aturan ke-l
, danc
0l,
c
1l,
c
2l...
c
nl adalah konstanta riil. Pada penelitian ini, digunakan FLC dengan tipe zero-order Sugeno. Pada tipe ini, bagian konsekuen dari setiap aturan merupakan sebuah nilai konstan yang disebut juga fuzzy singleton seperti ditunjukkan pada gambar 4. Nilai bagian konsekuen untuk aturan ke-l
dituliskan seperti pada persamaan (5) yang mana nilaic
0l yang digunakan dinotasikan sebagai NB = -1.0 , NS = -0.5, Z = 0.0 , PS = 0.5, and PB = 1.0.n l n l
l l l l
n n l
l
x
c
x
c
x
c
c
y
A
x
A
x
R
():
IF
1is
1and
...
and
is
THEN
0
1 1
2 2
...
(4)l
l
c
y
0 (5)Change of control (u) mu
Gambar 4. Grafik fuzzy singleton variabel output
Basis aturan yang digunakan pada TSK FLC dirangkum pada tabel 1. Basis aturan tersebut dibangun berdasarkan pengetahuan mengenai perilaku dan karakteristik respon undak kalang tertutup sistem air heater. Sesuai dengan [4], aturan-aturan dibuat dengan menganalisis bidang fase respon undak tersebut. Output TSK FLC dihitung berdasarkan basis aturan yang ada melalui mekanisme inferensi yang diawali dengan perhitungan kuat penyulutan, vl masing-masing aturan sesuai
IV-32 SENTRA
Tabel 1 Basis aturan fuzzy
Output ∆e
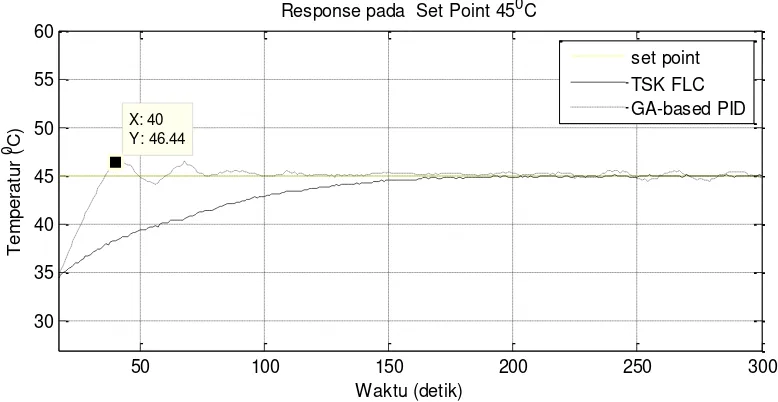
Perancangan TSK FLC diimplementasikan pada program mikrokontroller. Selanjutnya dilakukan pengujian untuk mendapatkan respon sistem kalang tertutup. Gambar 5 menunjukkan hasil respon sistem pada pengujian dengan nilai set point 450C. Pada gambar tersebut dibandingkan respon sistem pengendali TSK FLC dan respon sistem dengan pengendali PID yang telah dioptimasi dengan algoritma genetik (GA) yang diteliti pada [2]. Respon TSK FLC lebih lambat dibandingkan dengan respon pengendali PID. Respon FLC yang lebih lambat ini disebabkan interval kenaikan perubahan sinyal kontrol yang dibatasi sebesar [-1,1]. Namun demikian, respon pengendali PID membentuk overshoot sebesar 3,2 % sedangkan respon TSK FLC tanpa adanya overshoot dalam kondisi transisi.
50 100 150 200 250 300
Response pada Set Point 450C
set point TSK FLC GA-based PID
Gambar 5. Grasik respon sistem pada set point 450C
SENTRA IV-33
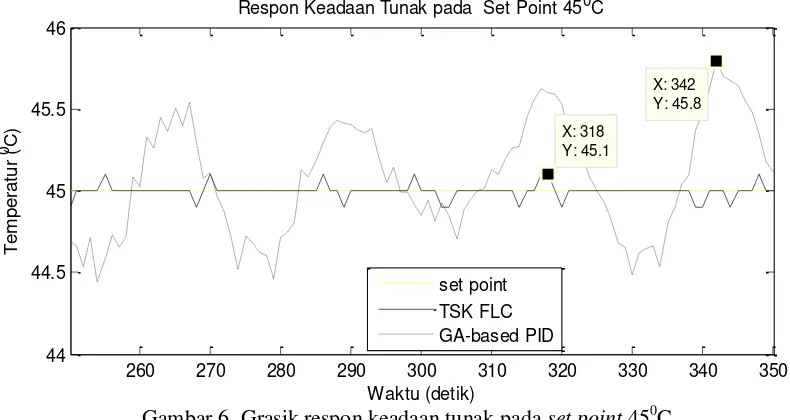
tersebut dapat dinyatakan bahwa pengendali TSK FLC mempunyai respon keadaan tunak yang lebih baik.
260 270 280 290 300 310 320 330 340 350
44
Respon Keadaan Tunak pada Set Point 450C
X: 318 Y: 45.1
set point TSK FLC GA-based PID
Gambar 6. Grasik respon keadaan tunak pada set point 450C
Selain itu, untuk melihat keandalan TSK FLC terhadap pengganggu, dilakukan pengujian dengan memberikan gangguan berupa pemberian es pada ujung tabung air heater. Gambar 7 menunjukkan grafik respon sistem dan grafik sinyal kontrol saat ada pengganggu. Dari grafik tersebut terlihat bahwa TSK FLC merespon adanya gangguan dengan cepat, dan mempertahankan nilai respon kembali pada set point. Hal ini menunjukkan bahwa TSK FLC yang dirancang memiliki sifat robust.
0 50 100 150 200 250 300 350 400
Gambar 7. Grasik respon terhadap gangguan
Kesimpulan
Pada penelitian ini telah dirancang TSK FLC sebagai pengendali air heater. TSK FLC menghasilkan respon transisi yang lebih lambat dibandingkan pengendali PID. Namun demikian TSK FLC menghasilkan respon tanpa overshoot. Pada keadaan tunak, TSK FLC juga menghasilkan nilai rata-rata kesalahan yang jauh lebih kecil dibandingkan dengan respon pengendali PID. Pengendali TSK FLC juga mampu menangani gangguan dengan cepat dan mampu mempertahankan respon tetap sesuai dengan nilai set point.
IV-34 SENTRA
[1] Ricardo Dunia, Thomas F. Edgar and Finn Haugen, “A Complete Programming Framework for Process Control Education”, 17th IEEE International Conference on Control Applications, Part of 2008 IEEE Multi-conference on Systems and Control San Antonio, Texas, USA, September 3-5, 2008.
[2] D. A. R. Wati, D., R. Hidayat, “Genetic Algorithm-based PID Parameters Optimization for Air Heater Temperature Control”, Proceeding of International Conference on Robotic, Biomimetics, Intelligent Computational Systems, 2013.
[3] Lakhdar Mokrani Katia Kouzi, Influence Of Fuzzy Adapted Scaling Factors On The Performance Of A Fuzzy Logic Controller Based On An Indirect Vector Control For Induction Motor Drive, Journal Of Electrical Engineering, Vol. 55, No. 7-8, 2004, pp. 188-194.
[4] C.C. Lee, “Fuzzy Logic in Control System : Fuzzy Logic Controller --Part 1”, IEEE Transaction on System, Man, and Cybernetics, Vol. 20. No. 2, March/April 1990, page 404-418.
[5] T.J.Ross, “Fuzzy Logic with Engineering Application”, John Willey & Sons, 2010.