BAB 3 PERANCANGAN ALAT DAN PEMBUATAN SISTEM
3.1 Perancangan Blok Diagram Sistem
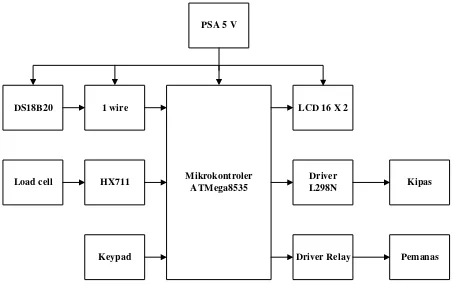
Adapun diagram blok dari system yang dirancang,seperti yang diperlihatkan pada gambar 3.1 di bawah ini:
PSA 5 V
DS18B20 1 wire
Mikrokontroler ATMega8535 Load cell HX711
Keypad
LCD 16 X 2
Driver L298N
Driver Relay
Kipas
Pemanas
Gambar 3.1 Diagram Blok
Adapun fungsi tiap blok dari gambar diagram blok di atas adalah:
1. Blok Sensor DS18b20 : Sebagai sensor mengukur suhu di dalam inkubator. 2. Blok PSA 5V : Sebagai sumber tegangan keseluruhan rangkaian
3. Blok LCD : Penampil hasil pengukuran dan pemprosessan yang dilakukan mikrokontroller
4. Blok Relay : Mengendalikan aktif matinya pemanas
5. Blok Driver L298N : Sebagai pengendali kipas
7. Kipas : Untuk menyalurkan udara panas dari heater ke seluruh bagian inkubator.
8. Pemanas : Sebagai penghangat udara di dalam inkubator 9. Keypad : Sebagai input setting suhu.
3.2 Rangkaian Mikrokontroler ATMega8535
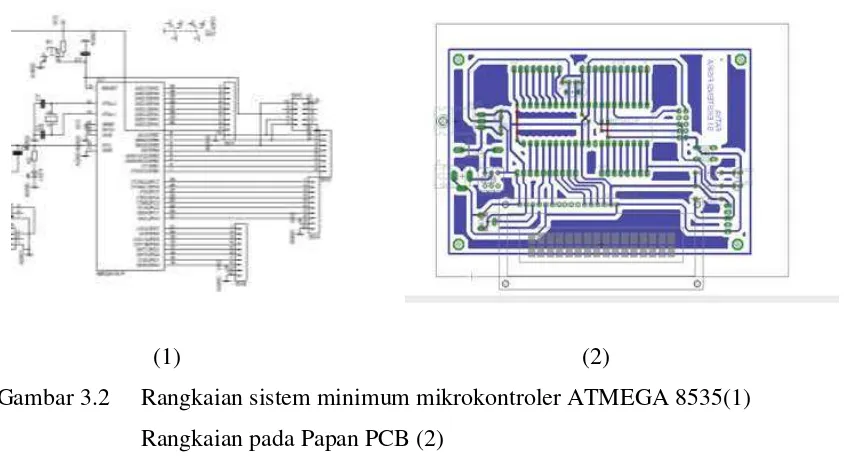
Rangkaian sistem minimum mikrokontroler ATMEGA 8535 dapat dilihat pada gambar di bawah ini :
(1) (2)
Gambar 3.2 Rangkaian sistem minimum mikrokontroler ATMEGA 8535(1) Rangkaian pada Papan PCB (2)
Dari gambar 3.2, Rangkaian tersebut berfungsi sebagai pusat kendali dari seluruh sistem yang ada. Komponen utama dari rangkaian ini adalah IC Mikrokontroler ATMega8535. Semua program diisikan pada memori dari IC ini sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki.
3.3 Perancangan Sensor Ds18B20
Perancangan rangkaian ini berfungsi sebagai pendeteksi tingkat suhu yang terdpat pada cairan fluida baik di sensor bagian atas maupun bagian bawah. Menurut datasheet, output yang dikeluarkan sensor DS1820 berupa konfigurasi angka 1 dan 0, yang mana mengindikasikan suatu suhu tertentu, berikut adalah tabel yang menjelaskan output sensor DS1820 beserta level pengukurannya.
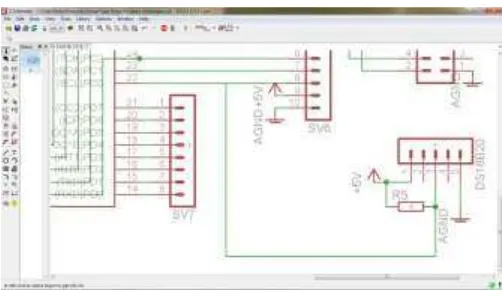
Agar bagian data pada sensor Ds18b20 dapat membaca keadaan suhu, maka diperlukan catu daya khusus yang di pasangkan ke bagian pin data dari sensor Ds18b20. Untuk itu dipasangkan resistor pull-up yang diambil dari supply 5V ke dan disambungkan ke pin data. Resistor yang digunakan bernilai 4700 ohm atau 4k7. Untuk lebih jelasnya, dapat dilihat pada gambar di bawah ini.
Gambar 3.3. Rangkaian Sensor Ds18B20
3.4 Rangkaian Power Supplay
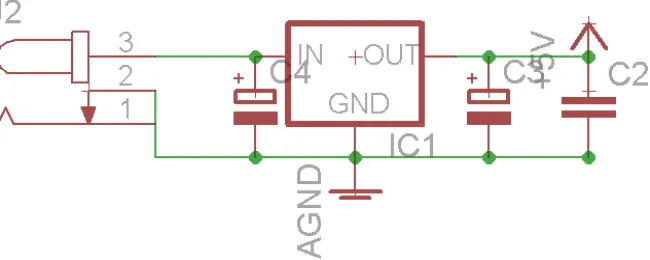
Rangkaian power supplay pada alat ini berfungsi sebagai sumber daya untuk menghidupkaan sistem. Dalam rangkaian ini peneliti memakai IC regulator 7805
Gambar 3.4 Rangkaian Power supplay.
3.5 Perancangan Rangkaian LCD (Liquid Crystal Display)
Pada alat ini, display yang digunakan adalah LCD (Liquid Crystal Display) 16 x 2. Untuk blok ini tidak ada komponen tambahan karena mikrokontroler dapat memberi data langsung ke LCD, pada LCD Hitachi - M1632 sudah terdapat driver
untuk mengubah data ASCII output mikrokontroler menjadi tampilan karakter. Pemasangan potensio sebesar 5 KΩ untuk mengatur kontras karakter yang tampil. Gambar 3.5 berikut merupakan gambar rangkaian LCD yang dihubungkan ke mikrokontroler.
Gambar 3.5 Rangkaian LCD
Dari gambar 3.4, rangkaian ini terhubung ke PC.2... PC.7, yang merupakan
pin I/O dua arah dan SPI mempunyai fungsi khusus sebagai pengiriman data secara serial. Sehingga nilai yang akan tampil pada LCD display akan dapat dikendalikan
3.6 Rangkaian Driver Motor L298N
Pada alat ini driver motor yang dipakai adalah driver motor L298N. Rangkaian ini berfungsi untuk mengontrol kecepatan dan arah pergerakan motor. Driver motor L298N membutuhkan 6 pin mikrokontroler namun pada rangkaian ini hanya menggunakan 3 pin mikrokontroler karena hanya menggerakkan satu buah motor saja yaitu pin B0, B1, dan OCR1A.
Gambar 3.6 Rangkaian Driver Motor L298N
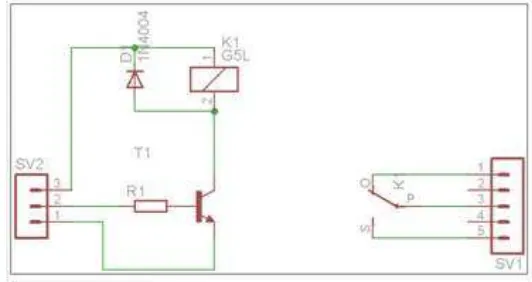
3.7 Rangkaian Relay
Pada alat ini dipasang relay untuk mengendalikan ON/OFF pemanas. Relay dipasang dengan kondisi Normally close.
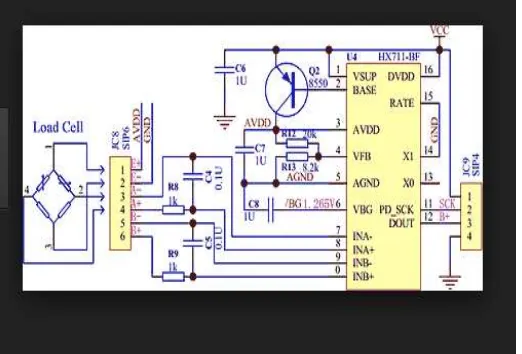
3.8 Rangkaian Loadcell dan Penguat HX711
Pada alat ini dipasang sensor loadcell dengan berat maksimal 6 kg. pada rangkaian ini loadcell dipasang penguat khusus untuk loadcell yaitu HX711. Berikut adalah gambar skematik modul HX711:
Gambar 3.10 Skematik Modul HX711
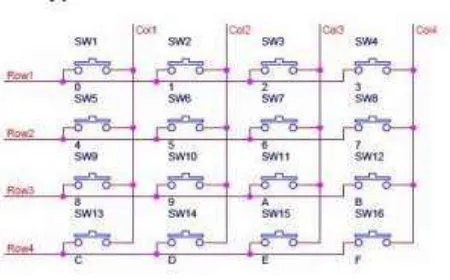
3.9 Rangkaian Keypad
Proses scaning untuk membaca penekanan tombol pada matrix keypad 4×4
untuk mikrokontroler diatas dilakukan secara bertahap kolom demi kolom dari
kolom pertama sampai kolom ke 4 dan baris pertama hingga baris ke 4. Program
untuk scaning matrix keypad 4×4 dapat bermacam-macam, tapi pada intinya sama.
Data port mikrokontroler, misalkan pada SW2 = 1011 0111 tersebut terbagi dalam
nible atas dan nible bawah dimana data nible atas (1011) merupakan data yang kita
kirimkan sedangkan data nible bawah (0111) adalah data hasil pembacaan penekanan
Gambar 3.11 Rangkaian Keypad
Mengirimkan logika Low untuk kolom 1 (Col1) dan logika HIGH untuk kolom
yang lain kemudian membaca data baris, misal tombol SW1 ditekan maka data
baris pertama (Row1) akan LOW sehingga data baris yang dibaca adalah 0111,
atau tombol yang ditekan tombol SW5 maka data pada baris ke 2 akan LOW
sehingga data yang terbaca 1011, atau tombol SW9 yang ditekan sehingga data
yang terbaca 1101, atau tombol SW13 yang ditekan maka data yang dibaca
adalah 1110 dan atau tidak ada tombol pada kolom pertama yang di tekan
maka data pembacaan baris akan 1111.
Mengirimkan logika Low untuk kolom 2 (Col2) dan logika HIGH untuk kolom
yang lain kemudian membaca data baris, misal tombol SW1 ditekan maka data
baris pertama (Row1) akan LOW sehingga data baris yang dibaca adalah 0111,
atau tombol yang ditekan tombol SW5 maka data pada baris ke 2 akan LOW
sehingga data yang terbaca 1011, atau tombol SW9 yang ditekan sehingga data
yang terbaca 1101, atau tombol SW13 yang ditekan maka data yang dibaca
adalah 1110 dan atau tidak ada tombol pada kolom pertama yang di tekan
maka data pembacaan baris akan 1111.
Mengirimkan logika Low untuk kolom 3 (Col3) dan logika HIGH untuk kolom
yang lain kemudian membaca data baris, misal tombol SW1 ditekan maka data
baris pertama (Row1) akan LOW sehingga data baris yang dibaca adalah 0111,
atau tombol yang ditekan tombol SW5 maka data pada baris ke 2 akan LOW
sehingga data yang terbaca 1011, atau tombol SW9 yang ditekan sehingga data
adalah 1110 dan atau tidak ada tombol pada kolom pertama yang di tekan
maka data pembacaan baris akan 1111.
Mengirimkan logika Low untuk kolom 4 (Col4) dan logika HIGH untuk kolom
yang lain kemudian membaca data baris, misal tombol SW1 ditekan maka data
baris pertama (Row1) akan LOW sehingga data baris yang dibaca adalah 0111,
atau tombol yang ditekan tombol SW5 maka data pada baris ke 2 akan LOW
sehingga data yang terbaca 1011, atau tombol SW9 yang ditekan sehingga data
yang terbaca 1101, atau tombol SW13 yang ditekan maka data yang dibaca
adalah 1110 dan atau tidak ada tombol pada kolom pertama yang di tekan
3.12 Flowchart
Mulai
Inisialisasi sistem
Konfigurasi Mikrokontroler ATmega8535
Set
Suhu Max
OK
Suhu Min
OK
Inisialiasasi DS18B20
Device Terdeteksi
Baca nilai tempertatur
Suhu DS18B20 atas > max Suhu DS18B20 bawah >max
Matikan Pemanas/ Blower OFF Tampilkan LCD
Selesai
Tidak
Ya Blower On
Tidak Tidak
BAB 4 PENGUJIAN ALAT DAN ANALISA RANGKAIAN
4.1. Pengujian Rangkaian Mikrokontroler ATMega8535
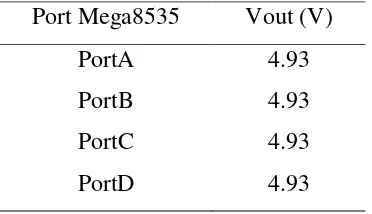
Pengujian pada rangkaian mikrokontroler ATMega8535 ini dapat dilakukan dengan menghubungkan rangkaian ini dengan rangkaian power supply sebagai sumber tegangan. Kaki 10 dan 30 dihubungkan dengan sumber tegangan 5 volt, sedangkan kaki 11 dan 31 dihubungkan dengan ground. Kemudian tegangan pada kaki 10 diukur dengan menggunakan Voltmeter. Dari hasil pengujian didapatkan tegangan pada kaki 10 sebesar 4,93 volt. Langkah selanjutnya adalah memberikan program sederhana pada mikrokontroler ATMega 8535 untuk menguji port port yang terdapat pada AtMega8535, program yang diberikan adalah sebagai berikut:
#include <mega8535.h>
Tabel 4.1 Pengujian Port ATMega8535 Port Mega8535 Vout (V)
PortA 4.93
PortB 4.93
PortC 4.93
PortD 4.93
Gambar 4.1 Pengujian PORT
4.2. Pengujian Power Supply
Power supply berfungsi untuk menyuplai tegangan ke alat tersebut. Tegangan yang dibutuhkan alat adalah 5 volt. Pengujian power supply dilakukan untuk mengetahui apakah tegangan yang masuk ke alat tersebut bernilai 5 volt.
Tabel 4.2 Pengujian Vin dan Vout
Vin (V) Vout (V)
Gambar 4.2 Pengujian Vout Power Supply
4.3 Pengujian Rangkaian Interfacing LCD 16x2
LCD dot matriks 16 x 2 karekater dapat dihubungkan langsung dengan mikrokontroler ATMega8535, disini fungsi LCD adalah sebagai tampilan hasil pengukuran dan diberi beberapa keterangan. Pada penelitian ini LCD dihubungkan ke mikrokontroler melalui PortC.2 ~ PortC.7 yang berfungsi bus data. Adapaun data yang dikirimkan oleh mikrokontroler merupakan kode ASCII data dalam bentuk bilangan biner, dimana data tersebut dapat diterjemahkan oleh LCD ke bentuk karakter.
Pengiriman data yang dari mikrokontroler diatur oleh pin EN, RS dan RW. Jalur EN dinamakan Enable. Jalur ini digunakan untuk memberi tahu LCD bahwa ada data yang sedang dikirimkan. Untuk mengirim data ke LCD, maka melalui program EN harus dibuat berlogika “low” dan set (high) pada dua jalur kontrol yang lain (RS dan RW). Jalur RW adalah jalur kontrol Read/write. Ketika RW berlogika
low (0), maka informasi pada bus akan dituliskan pada LCD. Ketika RW berlogika
high (1), maka program melakukan pembacaan memori dari LCD. Dalam penelitian ini umumnya pin RW selalu diberikan logika low(0).
RS dihubungkan ke Port C2, Enable dihubungkan ke Port C3, RW dihubungkan ke ground, DB4 dihubungkan ke Port C4, DB5 dihungkan ke Port C5, DB6 dihubungkan ke Port C6, DB7 dihubungkan ke Port C7.
#include <mega8535.h>
#include <alcd.h> //fungsi library LCD #include <stdio.h> // fungsi bahasa c void main()
{
lcd_init(16); while(1)
{
lcd_gotoxy(0,0); lcd_puts("tes"); lcd_gotoxy(0,1);
lcd_puts("fatya amy"); }
}}
Program diatas akan menampilkan kata “tes” di baris pertama dimulai dari kolom pertama pada LCD 16x2, baris kedua menampilkan “fatya amy”. `Pada penelitian ini, saat seluruh rangkaian diaktifkan, maka pada LCD akan tampil waktu pada baris pertama,
4.4 Pengujian dan Kalibrasi Sensor Suhu Ds18b20
Pada pembacaan sensor Ds18b20 yang terbaca masih merupakan nilai bit (data), sehingga diperlukan pengubahan dari penubahan dari pada pembacaan data yang diperoleh dari sensor Ds1820 menjadi nilai suhu. Kemudian perlu dilakukan pengujian keakuratan terhadap hasil kalibrasi yang dihasilkan sensor Ds1820 dengan
termometer standar.
Pada pengujian ini dibutuhkan pengambilan data sebagai pembanding dari nilai digital yang berasal dari sensor Ds1820 bagian atas dengan Ds1820 bagian bawah untuk setiap perubahan 1 0C. Di bawah ini merupakan data yang didapat dari sensor DS1820 bagian atas dan bagian bawah dengan Termometer Digital.
Tabel 4.3 Pengujian Ds18b20 Bagian Atas dengan Pembanding Termometer Digital
Dari tabel di atas suhu diukur dari mulai pembacaan 29°C hingga suhu 48°C thermometer digital sebagai perbandingan sensor Ds1820 bagian atas. Hasil yang didapatkan hampir linear, hal ini ditunjukkan pada grafik diawah ini.
Gambar 4.4 Grafik Pengujian Ds18b20 Bagian Atas dengan Pembanding Termometer Digital
Pada tabel di bawah ini menunjukkan nilai sensor Ds1820 bagian bawah: Tabel 4.4 Pengujian Ds18b20 Bagian Bawah dengan Pembanding Termometer
10 37.35 38
Dari tabel di atas suhu diukur dari mulai pembacaan 29°C hingga suhu 48°C thermometer digital sebagai perbandingan sensor Ds1820 bagian atas. Hasil yang didapatkan hampir linear, hal ini ditunjukkan pada grafik diawah ini.
Dari grafik di atas pembacaan sensor Ds1820 membentuk grafik polynomial. Dan apabila ditarik slope nya, maka didapat sebuah garis lurus yang medekati linear. Dapat ditarik kesimpulan bahwa pengukuran sensor Ds1820 mendekati grafik linear.
4.6 Pengujian dan Analisa Driver L298N beserta Motor DC
Pada sistem pengaturan kecepatan motor, diberikan nilai digital yang akan diuji untuk mendapatkan nilai tegangan yang dihasilkan oleh Driver Motor (L298N) dan pengaruhnya terhadap motor. Nilai digital yang diberikan sejumlah dari beberapa nilai bit (misalnya dari 15 sampai 225). Berikut listing program pengujian driver motor L298N:
#include <mega8535.h> #include <stdio.h> #include <delay.h>
// Declare your global variables here #define PWM1 OCR1A
// Compare B Match Interrupt: Off
TCCR1A=(1<<COM1A1) | (0<<COM1A0) | (1<<COM1B1) | (0<<COM1B0) | (1<<WGM11) | (1<<WGM10);
TCCR1B=(0<<ICNC1) | (0<<ICES1) | (0<<WGM13) | (0<<WGM12) | (0<<CS12) | (1<<CS11) | (1<<CS10);
OCR1AL=0x00; OCR1BH=0x00; OCR1BL=0x00; while (1) {
// Place your code here maju();
}
Tabel dibawah menunjukkan perubahan nilai digital yang diberikan terhadap
output Driver Motor yang dihasilkan. Tabel 4.5 Data pengujian Pwm Kipas
No. Pwm V
1 225 6,4
2 215 3,9
3 205 3,1
4 195 2,95
5 185 2,9
6 135 2,42
7 125 2,4
8 85 2,8
9 75 2,7
10 45 2,8
Gambar 4.6 Grafik Pengujian Driver Motor L298N
4.7 Pengujian Sensor Loadcell Dan HX711
Pada pengujian ini dibutuhkan pengambilan data sebagai pembanding dari nilai digital yang berasal dari sensor loadcell setiap perubahan 0,25 kg, pembanding yang digunakan adalah anak timbangan. Di bawah ini merupakan data yang didapat dari sensor loadcell tanpa menggunakan penguat Hx711.
Tabel 4.6 Pengujian Sensor Loadcell Tanpa Penguat
12 2,75 4,5
Gambar 4.7 Grafik Pengujian Sensor Loadcell tanpa Penguat HX711
Dari data di atas dapat dilihat bahwa semakin tinggi beban yg diberikan pada sensor maka semakin rendah pula resistasinya. Data yang dihasilkan oleh sensor dalam bentuk mV (milivolt) sehingga tidak terbaca oleh mikrokontroler
ATMega8535 maka dari itu perlu dipasang penguat untuk loadcell yaitu pengut HX711. Selanjutnya, dilakukan pengujian menggunakan penguat HX711. Berikut
hasil pengujian sensor loadcell meggunakan penguat HX711dengan Anak timbangan sebagai pembanding:
Tabel 4.7 Pengujian Loadcell dengan Penguat HX711
4 200 195 2,5
Grafik 4.8 pengujian sensor loadcell dengan Penguat HX711
Tabel 4.8 dapat dlihat bahwa data yang dihasilkan memiliki grafik yang
0 200 400 600 800 1000 1200
penguat HX711 sensor loadcell tidak perlu dikalibrasi karena sudah menghasilkan nilai yang sesuai.
4.8 Pengujian Relay
Pada penelitian ini relay dipasang Normally Close. Adapun listing program untuk pengujian relay adalah sebagai berikut:
#include <mega8535.h>
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRB=(0<<DDB7) | (0<<DDB6) | (0<<DDB5) | (0<<DDB4) | (0<<DDB3) | (0<<DDB2) | (0<<DDB1) | (1<<DDB0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTB=(0<<PORTB7) | (0<<PORTB6) | (0<<PORTB5) |
(0<<PORTB4) | (0<<PORTB3) | (0<<PORTB2) | (0<<PORTB1) | (0<<PORTB0);
// Port D initialization
// Function: Bit7=Out Bit6=Out Bit5=Out Bit4=In Bit3=In Bit2=In Bit1=out Bit0=out
// State: Bit7=0 Bit6=0 Bit5=0 Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTD=(0<<PORTD7) | (0<<PORTD6) | (0<<PORTD5) |
(0<<PORTD4) | (0<<PORTD3) | (0<<PORTD2) | (0<<PORTD1) | (0<<PORTD0);
Pengujian dilakukan dengan melakukan penekanan pada tombol keypad dan
hasilnya akan ditampilkan di LCD, misalnya menekan tombol 1 maka akan muncul 1
pada LCD begitu juga pada tombol lainnya. Berikut listing program keypad :
}
ada lcd_putsf("angka yg muncul");
}
}
4.10 Pengujian Keseluruhan Sistem
Tabel 4.9 Hasil Pengujian alat secara keseluruhan No Sensor
Atas ( 0C )
Sensor
Bawah ( 0C )
Sensor
Loadcell
Relay(Pemanas) Kipas
1 < 32 < 32 Terbaca ON ON
2 >= 32 =< 32 Terbaca ON ON
3 <= 32 >= 32 Terbaca ON ON
BAB 5 KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan hasil analisa, perancangan dan implementasi yang telah dilakukan, maka diperoleh beberapa kesimpulan sebagai berikut:
1. sensor DS18B20 sebagai sensor suhu menunjukkan angka yang stabil sehingga cocok untuk digunakan untuk inkubator dan sensor Laodcell sebagai sensor berat benda dengan menggunakan penguat hx711 dan stabil.
2. Penggunaan Mikrokontroller atmega8535 mampu mengolah sensor DS18B20 dan sensor Load Cell dengan cukup cepat dan dapat mengolah nilai bacaan sensor seta output yang cukup stabil.
3. Fungsi dari inkubator ini adalah sebagai media penghangat untuk bayi. Panas yang dihasilkan oleh inkubator ini sudah sesuai dengan yang diharapkan yaitu
32oC-37oC. Untuk sensor loadcell sudah cukup baik dengan error terbesar 4%.
5.2 Saran
Berikut ini adalah saran dan masukan sebagai bahan yang dapat digunakan untuk tahap pengembangan penelitian system ini antara lain:
1. Diharapkan untuk penelitian inkubator kedepannya untuk ditambahkan kelembaban udara sehingga dapat mengukur tingkatan kelembaban yang pas untuk anak bayi.
2. Diharapakan untuk penelitian selanjutnya agar dapat dikembangkan interface dalam bentuk pc sehingga monitoringnya dapat lebih real time.