PERANCANGAN DAN IMPLEMENTASI NEURO-FUZZY PREDICTIVE
BERBASISKAN REAL TIME UNTUK PENGATURAN TEMPERATUR
PADA FURNACE
Syah Yogta Wipogso–2207.100.620Jurusan Teknik Elektro–FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Surabaya–60111
Email :[email protected]
Abstrak -Pada penelitian ini, furnace digunakan untuk memanaskan cetakan emas yang terbuat dari gips, dengan tujuan mengeluarkan semua sisa – sisa bahan paraffin (lilin) yang terdapat didalam cetakan tersebut. Supaya cetakan tersebut tidak rusak, maka digunakan suatu pola pemanasan tertentu yang mengikuti fungsi waktu, sehingga dibutuhkan sebuah kontroler real-time, dengan pola sistem kendali tracking pada sistem closed loop. Pada non–predictive control, sinyal keluaran yang diberikan selalu terlambat terhadap masukannya, walaupun telah diberikan model following tracking. Supaya keluaran selalu mengikuti fungsi waktu tanpa keterlambatan, maka diperlukan dari mekanisme kontrol prediktif.
Kontrol neuro-fuzzy berfungsi untuk mengurangi dan menghilangkan osilasi pada perubahan atau kestabilan temperatur pada furnace. Sedangkan, untuk mengatasi ketidaklinearan dari sistem tersebut digunakan kontrol prediktif. Oleh karena itu, perlu dibuat suatu kontrol prediktif dengan harapan keluaran yang didapatkan tersebut tidak akan terlambat lagi terhadap fungsi waktunya dan menjaga serta memprediksi perubahan temperatur pada furnace.
Kata kunci : Neuro-fuzzy predictive, Furnace, Delphi 7.0
I. PENDAHULUAN
Temperatur merupakan suatu keadaan udara pada kondisi tertentu yang biasa dinyatakan dalam ukuran Celcius, Reamur maupun Fahreinheit. Pengaturan temperatur sering digunakan dalam berbagai permasalahan, baik dalam bidang industri, rumah tangga, kedokteran dan lain–lain.
Dalam era modern, perkembangan teknologi semakin pesat seiring dengan bertambahnya waktu. Penggunaan furnace sebagai alat untuk pemanas tak lagi menggunakan sistem konvensional berupa tungku yang besar dengan bahan bakar fosil. Saat ini telah ditemukan dan dikembangkan penggunaan furnace dengan menggunakan sistem elektris, serta pengaturan kestabilan temperatur yang lebih baik. Akan tetapi, setiap kemajuan teknologi masih terdapat kekurangan yang harus diperbaiki dalam kestabilan temperatur pada alat tersebut. Ada beberapa metode yang dapat diterapkan dalam
menangani permasalahan tersebut, seperti logika fuzzy, neural network atau gabungan dari keduanya yakni neuro-fuzzy.
Fuzzy logic pertama kali diperkenalkan oleh Prof. Lotfi Zadeh (1965) [4] sebagai pengendali dan proses yang samar atau infomasi lingual. Fuzzy logic telah banyak dikembangkan untuk algoritma proses pengolahan informasi yang halus sekali dengan masukan yang halus dan transformasi keluaran yang digunakan untuk pengambilan data yang bermanfaat. Dalam hubungannya dengan neural network, perkembangan dari fuzzy logic mempunyai sejarah yang sama. Teori dasar dan algoritma fuzzy logic dikembangkan pada akhir tahun 60-an, dan aplikasi kontrol yang pertama ditemukan oleh Mamdani. Selama tahun 70-an, Mamdani mengembangkan risetnya sehingga menemukan self-organizing fuzzy control. Selama tahun 80-an, hanya sebagian kecil saja riset yang dilakukan di Inggris dan Amerika Serikat, tetapi di Jepang aplikasi kontrol fuzzy logic banyak sekali dikembangkan[8].
Pada industri pengolahan logam mulia, diperlukan suatu furnace yang memiliki tingkat derajat temperatur yang tinggi, yakni sekitar 1200oC, serta stabilitas temperatur yang terjaga, maka diperlukan penggunaan suatu metode neuro-fuzzy predictive yang dapat mengatur serta memprediksikan kejadian atau kesalahan yang akan terjadi disaat mendatang, sehingga kesalahan atau gangguan kestabilan temperatur dari furnace dapat diminimalisir sesuai dengan harapan yang diinginkan.
Selain itu, pemanasan yang merata dari furnace dapat menghasilkan hasil yang terbaik dalam proses pemanasan cetakan emas.
II. NEURO-FUZZY DAN KONTROLER PI 2.1. Kontroler Neuro-fuzzy
Neuro-fuzzy merupakan suatu model yang dilatih menggunakan jaringan syaraf, namun struktur jaringannya diinterpretasikan dengan sekelompok aturan-aturan fuzzy (Kasabov, 2002).[10]
1 1 ) ( ) ( * s s R s C KpK I *
Pengertian neuro-fuzzy adalah gabungan dari prinsip belajar neural network dan adaptasi dari fungsi keanggotaan dari fuzzy. Prinsip belajar yang digunakan adalah menggunakan metode back propagation dengan tiga lapis neural network. Bobot jaringan direpresentasikan sebagai fungsi keanggotaan (fuzzy set). Kesalahan yang diperoleh dari sistem, dipropagasi balik untuk mencari bobot jaringan yang baru, artinya mencari parameter fungsi keanggotaan dari fuzzy set yang lebih baik.
Teori neural network dengan konsep fuzzy pada prinsipnya yaitu, usaha dalam mengeliminasi kekurangan dan kelebihan dari setiap metode. Dalam hal ini, kemampuan adaptasi dan belajar dari neural network dimanfaatkan oleh fuzzy untuk melakukan tuning terhadap parameter fuzzy (fuzzy tidak memiliki kemampuan belajar).
Struktur neuro-fuzzy adalah menempatkan parameter fuzzy yaitu:
1. Parameter fungsi keanggotaan (center, simpangan dan lain sebagainya),
2. Jumlah basis kaidah ke dalam bobot jaringan neural. Proses belajar neural selanjutnya akan melakukan perubahan terhadap bobot. 2.2. Kontroler PI (Proporsional dan Integral)
Kontroler PI merupakan kontroler feed-forward yang berfungsi mengolah sinyal kesalahan menjadi sinyal kontrol. Kontroler proporsional ditambah integral (PI) merupakan kontroler yang aksi kontrolernya mempunyai sifat proporsional dan integral terhadap sinyal kesalahan.
1. Kontroler tipe Proporsioanl
Hubungan sinyal kesalahan dan sinyal kontrol pada kontroler tipe-P dapat dinyatakan sebagai berikut: ) ( ) (t K et u p (1)
2. Kontroler tipe Proporsional Integral Hubungan sinyal kesalahan dan sinyal kontrol pada kontroler tipe-PI dapat dinyatakan
K e t
e t dt t u() p () 1 ( ) 1 (2)atau dalam bentuk transfer function,
s s K s E s U p 1 1 1) ( ) ( ) ( (3) Perancangan suatu kontroler PI pada dasarnya adalah menentukan dari nilai parameter K danp I,
sehingga respon sistem hasil desain sesuai dengan spesifikasi performansi yang diinginkan. Oleh karena itu, pada perancangan kontroler PI secara analitik, selalu dilakukan dengan beberapa tahapan antara lain:
1. Menentukan model matematik Plant, model matematik plant dapat diturunkan melalui hubungan fisik antar komponen atau dengan menggunakan metode identifikasi. Orde dari model matematik ini hanya boleh orde satu atau dua. jika sistem / plant memiliki orde tinggi, maka model matematik harus disederhanakan menjadi bentuk orde satu atau dua.
2. Menentukan spesifikasi performansi, karena perancangan ini tergolong perancangan dengan pendekatan respon waktu dan hanya untuk sistem orde satu dan dua, maka ukuran kualitas respon yang digunakan ukuran kualitas respon waktu. Biasanya digunakan Settling Time dan persentase kesalahan Steady State untuk pendekatan respon orde satu atau Settling Time, persentase Overshoot dan persentase kesalahan Steady State untuk pendekatan respon sistem orde dua. 3. Merancang kontroler PI, merupakan tahapan
akhir dari perancangan meliputi pemilihan tipe kontroler dan menghitung nilai parameter kontroler. Pemilihan tipe ini erat hubungannya dengan model dari plant, yaitu jika model plant adalah orde satu, maka tipe kontroler yang dipilih PI. jika model plant adalah orde dua, maka tipe kontroler yang dipilih PID.
Sebuah Plant orde I dengan kontroler PI, membentuk sistem umpan balik dengan masukan R(s) dan keluaran C(s). Closed Loop Transfer Function (CLTF) sistem dapat dituliskan
) 1 ( ) 1 ( ) 1 ( ) ( ) ( s K K s s s K K s R s C I p I I p (4)
Dari persamaan (4), menunjukkan bahwa orde dari sistem hasil desain tergantung pada pemilihan harga I. Jika dipilihI= , maka sistem hasil desain adalah orde satu. Sebaliknya, jika dipilih
I , maka sistem hasil desain adalah orde dua. a. Jika dipilih 1 , CLTF sistem hasil
desain menjadi 1 1 ) ( ) ( s K K K K s K K s R s C p I p I p (5) Atau ; dengan (6)
Sistem hasil desain adalah orde satu, zero off-set (%ESS= 0%), dengan time constant yang baru
*
. Dengan demikian, dapat disimpulkan bahwa: Suatu plant orde kesatu dengan kontroler PI jika dipilih 1, sistem hasil desain adalah sistem orde I dengan time constant* dan zero off-set.
1 2 1 N I ) 1 2 ( 2 N N P K K 1 2 1 ) 1 ( ) ( ) ( 2 2 s s s s R s C N N I
Berdasarkan hubungan formulasi di atas, parameter kontroler dapat di tuliskan
1 dan K Kp *I ;* (7) adalah spesifikasi desain dari
(8)
b. Jika 1, CLTF sistem hasil desain menjadi (9) atau dengan K KP I N 2 1 dan K K K K P I P N (1 ) 2 (10) Menujukkan hasil desain adalah orde kedua dengan delay dan zero off-set. Parameter sistem hasil desain adalah frequency natural N, keofisien redaman dan faktor delayI.
Dapat disimpulkan bahwa; suatu plant orde satu dengan kontroler PI, jika 1, sistem hasil desain adalah sistem orde kedua , zero off-set, dengan parameter sistemN,, danI.
Berdasarkan hubungan formulasi di atas, parameter kontroler dapat di tuliskan
dan (11)
III. NEURO FUZZY PREDICTIVE CONTROL Dalam perancangan dan desain kontroler dari suatu plant meliputi dari perangkat keras dan perangkat lunak. Dalam alur proses yang terjadi dapat dilihat pada Gambar 3.1.
Gambar 3.1. Diagram blok sistem Personal Computer (PC) berfungsi dalam pengendalian sistem, dengan penggunaan perangkat lunak Delphi 7.0 serta penggunaan perangkat keras meliputi dari mikrokontroler, DAC, Termokopel tipe K, beserta furnace. Sinyal yang dikirim dari PC ke mikrokontroler untuk pengaturan PWM serta Blower ke bagian furnace.
Pada temperatur furnace mencapai pada yang diinginkan, berdasarkan dari data yang dibaca oleh thermocouple-K yang dikirimkan ke PC melalui konversi dari analog ke digital. Sehingga dapat diketahui stabilitas temperatur dari furnace. Penggunaan perangkat keras meliputi dari : 1. Mikrokontroler AVR Atmega 8535 2. Digital Analog Converter 0808 3. Blower (motor DC 12 volt)
4. Termokopel tipe K (- 200oC - + 1200oC) 5. Furnace
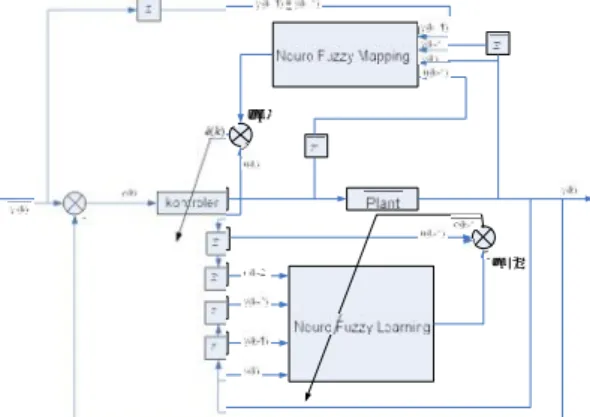
Pada plant tersebut, temperatur dari furnace dikendalikan secara otomatis dengan menggunakan metode kontroler neuro-fuzzy predictive. Penggunaan dari metode kontroler neuro-fuzzy predictive dapat dilihat pada Gambar 3.2.
) 1 ( ˆk u ) ( ˆk u ) ( ˆk e
Gambar 3.2. Diagram blok neuro-fuzzy predictive. Blok diagram neuro-fuzzy predictive terdiri dari 4 bagan penyusun, yakni
1. Neuro-fuzzy learning
Pada bagan ini meliputi dari peristiwa back propagation, dimana terjadi perbedaan antara nilai target u(k-1) dengan nilai keluaran estimasi
− 1 . Perbedaan tersebut menimbulkan kesalahan, kesalahan digunakan untuk proses back propagasi memperbaiki pembobot yang baru, agar memiliki nilai yang lebih baik. 2. Neuro-fuzzy mapping
Bagan ini hanya mengalami proses forward sehingga hasil dari neuro-fuzzy mapping secara langsung dapat dibandingkan dengan sinyal kontrol u(k).
3. Kontroler
Salah satu fungsi komponen kontroler adalah meminimalkan sinyal kesalahan yaitu perbedaan antara setpoint dan sinyal aktual. Hal ini sesuai dengan tujuan sistem kontrol yaitu mendapatkan sinyal aktual yang senantiasa (diinginkan) sama dengan sinyal setpoint
4. Plant
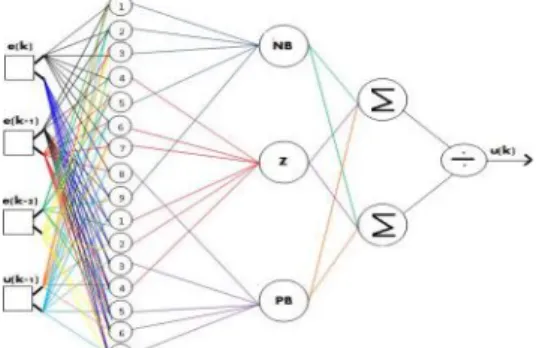
Pada prinsipnya, neuro-fuzzy predictive dibangun oleh neural network, fuzzy logic serta model predictive control. Penggunaan struktur dari
1 ) 1 ( ) 1 ( ) 1 ( ) 1 ( ) ( ) ( 2 2 s K K K K s K K s K K s K K s s K K s R s C p I p p I I p I p I I p
neural network serta aturan – aturan dari adaptasi fuzzy logic yang diterapkan pada metode tersebut. Struktur neural network dengan aturan fuzzy dapat dilihat pada Gambar 3.3.
Gambar 3.3 Struktur neuro-fuzzy Mamdani Model predictive control adalah suatu kontroler yang digunakan untuk mengontrol sekaligus mengestimasi model matematis dari suatu plant. Secara umum MPC terdiri dari 2 bagian yaitu:
1. Sebagai prediksi eksplisit dari perilaku plant perbaikan yang akan datang.
2. komputasi perbaikan model sekaligus perbaikan kesalahan plant.
Persamaan umum dari MPC adalah ) ( ˆ ˆ ) ( ˆ ˆ ) 1 ( ˆ k Ax k Bu k x (13) ) ( ˆ ˆ ) ( ˆ k Cx k y (14)
kesalahan estimasi dari model matematis dan plant yang terukur adalah:
) ( ˆ ) (k yk y e (15) )) ( ˆ ) ( ( )) ( ˆ ) ( (y k y k y k y k e eT T (16)
dimana : e = error vektor
Indeks performansi yang dipilih untuk melihat apakah paramater – parameter kontroler tersebut sudah memenuhi kriteria adalah
(17) dimana : J = indeks performansi minimum
Kebutuhan akan temperatur yang tinggi, serta stabilitas yang harus terjaga ,agar dapat memenuhi pola pemanasan dari cetakan emas, maka dibutuhkan pengendalian yang dapat mengurangi osilasi yang terjadi pada saat per ubahan temperatur furnace. Pengaturan dengan kontrol neuro fuzzy dapat mengurangi terjadinya osilasi. Sedangkan untuk kontrol prediktif mengatasi ketidaklinearan dari sistem tersebut.
IV. SIMULASI DAN EKSPERIMEN Pengambilan data tidak hanya dapat diambil langsung dari plant nyata, melainkan juga dapat dilakukan dengan menggunakan simulasi. Penggunaan simulasi dengan bertujuan untuk membandingkan hasil data simulasi dengan data sebenarnya dari plant. Program simulasi untuk
furnace menggunakan bahasa pemrograman Matlab.
Gambar 4.1 Simulasi Respon furnace tanpa kontroler tanpa gangguan.
Dari Gambar 4.1 dapat diketahui variasi kenaikan temperatur terhadap waktu. Saat furnace diberikan setpoint secara maksimum tanpa gangguan, terlihat grafik respon yang halus setiap kenaikan derajat temperaturnya.
Pengambilan data dilakukan kembali dengan cara simulasi serta penggunaan gangguan terhadap temperatur furnace, apakah dapat mencapai titik setpoint yang diberikan dan bersifat stabil. Dapat dilihat pada Gambar 4.2.
Gambar 4.2. simulasi respon furnace tanpa kontroler dengan adanya gangguan
Sedangkan, untuk realiisasi plant, respon proses yang terjadi untuk setiap kenaikan temperatur sangat lambat. Hal itu dapat dilihat pada Gambar 4.3.
Gambar 4.3 Proses kenaikan temperatur furnace real plant tanpa kontroler.
Implementasi pada Gambar 4.4 dan Gambar 4.5 merupakan penggunaan kontroler PI pada furnace dengan gangguan blower untuk mengetahui performansi sistem.
10 20 30 40 50 60 70 80 90 100 0 100 200 300 400 500 600 Time Sampling(menit) T em pe ra tu r( de ra ja t C el ci us ) 10 20 30 40 50 60 70 80 90 100 -100 0 100 200 300 400 500 600 700 Time Sampling(menit) T em pe ra tu r( de ra jat C el ci us ) )) ( ˆ ) ( ( )) ( ˆ ) ( ( 2 1 2 1 min ee y k y k yk y k J T T
Gambar 4.4. Respon dengan kontroler PI dengan gangguan sekali
Gambar 4.5. Respon dengan kontroler PI dengan gangguan dua kali
Mencoba simulasi dengan input gelombang sinus dengan amplitudo 10 pada tampilan grafik dengan nilai alpha/ learning rate yang dapat diubah untuk mengetahui kecepatan tracking pada sinusnya.
Gambar 4.6. Tampilan set point masukan sinus Diberikan masukan berupa sinyal sinus seperti Gambar 4.6, maka simulasi tracking sinyal masukan dengan learning rate yang berbeda dapat dilihat pada Gambar 4.7. Dengan demikian maka dapat kita ketahui bahwa Alpha sangat mempengaruhi tracking dari kontrolernya, semakin besar learning rate - nya semakin cepat kontroler tracking sinyal sinusnya. Sebaliknya, jika learning rate semakin kecil maka semakin lambat kontroler itu melakukan tracking sinyal pada set point-nya (sinyal sinus).
Gambar 4.7 Tracking sinus dengan alpha 0.001 Simulasi untuk neuro-fuzzy predictive dapat ditunjukkan pada Gambar 4.8
Gambar 4.8. Respon keluaran tracking
Grafik respon keluaran tracking dapat diketahui dari memasukkan waktu yang akan datang, yakni berupa yr(k+1), yr(k+2), yr(k+3),
yr(k+4), yr(k+5), dengan setpoint yang telah
ditetapkan sebelumnya. sedangkan untuk keluaran sinyal Yr(k) dapat dilihat pada Gambar 4.9
Gambar 4.9 Grafik keluaran tracking dan Yr(k) V. PENUTUP
Berdasarkan dari hasil penelitian yang telah dilakukan, diperoleh manfaat dari pengembangan metode fuzzy neural network untuk seluruh parameter, termasuk untuk parameter tuning secara simultan. Pendekatan metode
neuro-fuzzy ini akan diimplementasikan pada plant furnace yang telah banyak diketahui di literatur dan data - data pada proses pengolahan dan pemanasan logam yang banyak digunakan dalam dunia industri.
Performansi dari Neuro-fuzzy predictive didesain dengan tujuan untuk memprediksikan kejadian yang akan datang berdasarkan following tracking, merngetahui dan membandingan antara neuro-fuzzy predictive dengan pendekatan yang lainnya. Hasilnya menunjukkan bahwa metodologi yang digunakan sangat efektif untuk membangun linguistik yang akurat dari neuro-fuzzy control dan dibandingkan dengan pendekatan kontroler lainnya seperti kontroler PI (Proportional + Integral).
DAFTAR PUSTAKA
[1] Curtis D. Johnson, Modern Control Engineering, Prentice Hall, 5thedition, 2002, pp. 65–81.
[2] Curtis D. Johnson, Process Control Instrumentation Technology, University of Houston, Prentice Hall, 7th edition, 1994, pp. 552–572.
[3] Maciejowski J.M , Multivariable Feedback Design, Addison-Wesley, Cambridge Unuversity and Pembroke College, 1989, pp. 291-306.
[4] Zadeh L A, A New Approach to the Analysis of Complex Systems and Decision Process, IEEE Transaction, System, Man, and Cybernetics, Vol 5, no. 1, 2000 pp.35-50.
[5] Sugeno M, Industrial Applications of Fuzzy Control, Elsevier Science Pub Co., 1985
[6] Tolle H. , Ersi E. Neurocontrol: LearningControl Systems Inspired by Neural Architecture and Human Problem Solving, 1999 Springer-Verlag, Berlin.
[7] Miller W.T. , Real-Time Control Aplication of Bipped Walking Robot, Proc. INNSWCCN, Portland OR, Vol 3, 1999 pp 153-156.
[8] Schwartz D. G. , Klir G.J. , Fuzzy Logic Flower in Japan, IEEE Spectrum, July, 1999, pp. 32-35. [9] Kosko B.(Ed), Neural Network for
Signal Processing, Prentice Hall Englewood Cliffs, NJ, 1992
[10] Kusumadewi, Sri; dan Hartati, Sri. 2006. “Neuro-Fuzzy”. Yogyakarta: Graha Ilmu.
[11] J.M. Mendel, Fuzzy sets for words: A New Beginning, in: Proc. IEEE Int.Conf. on Fuzzy Systems, St. Louis, MO, May 2003, pp. 37-42.
[12] J.M. Mendel, R.I. Bob John, Type-2 fuzzy sets made simple, IEEE Trans.Fuzzy Syst. 10 (April) (2002) 117-127
[13] Ogunnaike, Babtunde A. and W. Harmon Ray. 1994. “Process Dynamics,
Modeling and Control”, Oxford University Press, New York.
Riwayat Hidup
Syah Yogta Wipogso, lahir di Surabaya pada tanggal 04 Februari 1985, merupakan putra ketiga dari empat bersaudara dari pasangan Djupri Kaseroen dan Poniasih. Sampai saat ini masih bertempat tinggal di Griya Kebraon Utama VII/DD 16 Surabaya. Email :[email protected]
Riwayat pendidikan :
Tahun 1998 lulus dari SD Negeri 09 Talawi–SumBar
Tahun 2001 lulus dari SLTP Negeri 03 Sawahlunto–SumBar
Tahun 2004 lulus dari SMU Negeri 01 Sawahlunto - SumBar
Tahun 2007 lulus dari Diploma III Program Studi Teknik Elektro, Jurusan Ketenagaan/Power System, Universitas Gadjah Mada (UGM) Yogyakarta
Akhir tahun 2007 melanjutkan ke jenjang Strata 1 pada Jurusan Teknik Elektro Fakultas Teknologi Industri – Institut Teknologi Sepuluh Nopember Surabaya. Pada bulan januari 2010 mengikuti seminar dan ujian Tugas Akhir di Bidang Studi Teknik Sistem Pengaturan Jurusan Teknik Elektro FTI – ITS sebagai salah satu syarat untuk memperoleh gelar sarjana Teknik Elektro.