1
PERANCANGAN DAN IMPLEMENTASI NEUROFUZZY ADAPTIVE BERBASISKAN
REAL TIME UNTUK PENGATURAN TEMPERATUR PADA FURNACE
Pranata Sulistyawan – 2207.100.620
Jurusan Teknik Elektro – FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Surabaya – 60111
ata@mhs_ee.its.ac.id
Abstrak
Pada penelitian ini, furnace digunakan untuk
memanaskan cetakan emas yang terbuat dari gips, dengan tujuan untuk mengeluarkan semua sisa – sisa bahan paraffin (lilin) yang terdapat didalam cetakan tersebut agar nantinya cetakan tersebut tidak rusak, sehingga dilakukan pola pemanasan tertentu mengikuti fungsi waktu. Dengan demikian, dibutuhkan sebuah kontroler real-time, dengan sistem kendali tracking pada sistem closed–loop. Untuk yang non – adaptive akan selalu memberikan sinyal keluaran yang selalu terlambat terhadap masukan yang diberikan, walaupun sudah diberikan model following tracking. Agar keluaran selalu mengikuti fungsi waktu tanpa keterlambatan maka diperlukan mekanisme adaptif.
Kontrol neurofuzzy berguna untuk mengurangi osilasi pada perubahan atau ketidakstabilan temperatur pada furnace, sedangkan untuk mengatasi ketidak linear dari sistem tersebut digunakan kontrol adaptif.
Oleh karena itu, perlu dibuat suatu kontrol adaptif dengan harapan keluaran yang didapatkan tersebut tidak akan terlambat lagi terhadap fungsi waktunya dan menjaga perubahan temperatur pada furnace agar sesuai dengan set-point yang diinginkan.
Kata Kunci: Neural Network, Fuzzy Logic, Neurofuzzy, furnace, adaptive control, backpropagation.
1. PENDAHULUAN
Perkembangan dunia teknologi kontrol membawa dampak pada semakin banyaknya aplikasi-aplikasi yang dapat dibuat dan dipergunakan pada berbagai macam aplikasi di industri. Aplikasi-aplikasi dari teknologi kontrol ini dapat diimplementasikan dan diterapkan pada bidang industri yang berhubungan dengan kecerdasan buatan untuk mengatur temperatur yang tinggi pada
furnace.
Berdasarkan penelitian sebelumnya, pengujian dan analisa mengenai pemerataan panas yang dihasilkan dalam tungku atau furnace sangat diperlukan untuk meningkatkan akurasi serta mengurangi pengaruh perbedaan hasil pengukuran antara sensor dengan pemanas. Hal ini, menyebabkan waktu naik respon transien sistem menjadi lama. Oleh karena itu, dilakukan pengaturan temperatur dengan menggunakan sistem pengaturan cerdas dengan metode neurofuzzy dengan struktur neuralnetwork dengan aturan-aturan
fuzzy.
Aplikasi neurocontrol yang pertama
dikembangkan oleh Widrow dan Smith pada tahun 1963. Suatu ADAptive LINear Element (ADALINE) diajarkan untuk membuat kurva peralihan untuk mengatur kestabilan pendulum. Saat tahun 70an, Albus mengusulkan CMAC sebagai model yang tersusun atas fungsi-fungsi dari otak kecil dan
menggunakannya sebagai kontrol manipulator pada robot. Sejak awal tahun 80an, CMAC telah banyak digunakan untuk sistem permodelan dan kontrol yang non linear pada pemrosesan kimia[8]. Pada pertengahan tahun 80an digunakan kembali untuk aplikasi robot[9,10]. Selama periode tahun 80an banyak arsitektur dari Artifial Neural Network (ANN) dan Artificial Intelligent Control (AIC) yang digunakan untuk mengembangkan algoritma ini, sehingga kekuatan pembelajaran dan skema metode adaptif seing dikembangkan melalui riset
Fuzzy logic pertama kali diperkenalkan oleh Prof.
Lotfi Zadeh (1965) [4] sebagai pengendali dan proses yang samar atau infomasi lingual. Banyak.
fuzzy logic telah dikembangkan untuk menyediakan
algoritma proses pengolahan informasi yang halus sekali dengan input yang halus dan transformasi
output yang digunakan untuk pengambilan data
yang bermanfaat. Dalam hubungannya dengan
neural network, perkembangan dari fuzzy logic
mempunyai sejarah yang sama. Teori dasar dan algoritma fuzzy logic dikembangkan pada akhir tahun 60-an, dan aplikasi kontrol yang pertama ditemukan oleh Mamdani. Selama tahun 70-an Mamdani mengembangkan risetnya sehingga menemukan self-organizing fuzzy control. Selama tahun 80-an, hanya sebagian kecil saja riset yang dilakukan di Inggris dan Amerika Serikat, tetapi di Jepang aplikasi kontrol fuzzy logic banyak sekali dikembangkan[8]. Produk yang telah digunakan menggunakan metode tersebut meliputi ruang lingkup kontrol kereta api bawah tanah, kontrol helikopter, mekanisme autofocus kamera, kontroler mesin cuci modern dan juga digunakan dalam jumlah yang sangat besar di industri otomotif[self 1990]. Kontroler fuzzy mempunyai performansi kestabilan jauh lebih baik daripada tuning PID
controller. Segala aplikasi tersebut terjadi di
Inggris, tetapi selama tahun 80an eksploitasi teknik ini sangat bekembang di Jepang[5,8]. Dengan segala keterangan atas perkembangan algoritma ANN dan fuzzy logic maka kita dapat mengkombinasikan kedua metode tersebut untuk permodelan sistem yang sangat bermanfaat[6, 9, 10].
Neurofuzzy dengan metode pendekatan fuzzy neuralnetwork akan dibahas pada Bagian 2.
Struktur kontroler yang digunakan pada sistem, berdasar sebuah fungsi waktu kontinyu untuk mengatur derajat akurasi, sesuai dengan model yang diinginkan dan untuk menjaga kestabilan temperatur pada furnace akan dijelaskan pada Bagian 3. Pada Bagian 4 dibahas tentang hasil dan analisa sistem .
Hasil dari pengujian sistem dengan metode control neurofuzzy adaptif dibahas pada Bagian 5.
2. KONTROLER PI DAN NEUROFUZZY
Dalam setiap perancangan kontroler, diperlukan suatu
spesifikasi kontrol yang akan digunakan sebagai acuan perancangan. Parameter-parameter yang diperlukan untuk menganalisa karakteristik performansi sistem kontrol adalah sebagai berikut:
1. Waktu tunda(delay time) - td : adalah waktu yang diperlukan respon mencapai setengah harga akhir yang pertama.
2. Waktu naik(rise-time) - tr : adalah waktu untuk respon naik dari 10% sampai 90% , 5% sampai 90%, atau 0% sampai 100% dari harga akhirnya.
3. Waktu puncak(peak-time) – tp : adalah waktu untuk mencapai puncak lewatan (overshoot pertama).
4. Lewatan maksimum(maksimum overshoot) - Mp :
adalah puncak lewatan maksimum respon transien atau secara matematis diberikan sebagai berikut: Persen lewatan maksimum = {c()–c() / c()} x 100% Besarnya (persen) lewatan maksimum secara langsung menunjukkan kestabilan relatif sistem. 5. Waktu penetapan (settling-time) - ts : adalah waktu
untuk respon mencapai dan menetap pada fraksi harga akhir yang ditentukan yaitu 5% atau 2%. Dengan demikian kurva respon transien secara
virtual dapat diperoleh dengan menentukan
hargaharga td, tr, tp, ts , Mp yang dapat dilihat pada gambar 2.1. 0.05atau0.02 C(t) 1 0.9 0.5 0.1 0 Mp td tr tp ts
Gambar 2.1. Spesifikasi respon transien 2.1. Perbandingan metode kontroler PI dengan Neurofuzzy
Neurofuzzy merupakan suatu model yang dilatih
menggunakan jaringan syaraf, namun struktur jaringannya diinterpretasikan dengan sekelompok aturan-aturan fuzzy. Sistem neurofuzzy menggabungkan prinsip belajar dari neural network untuk adaptasi fungsi keanggotaan dari
fuzzy. Prinsip belajar yang digunakan adalah menggunakan back propagation dengan tiga lapis neuralnetwork. Bobot
jaringan direpresentasikan sebagai fungsi keanggotaan set
fuzzy. Selanjutnya kesalahan dari sistem dipropagasikan balik
untuk mencari bobot jaringan yang artinya mencari parameter fungsi keanggotaan dari set fuzzy yang optimal. Penerapan kombinasi antara teori neuralnetwork dengan konsep fuzzy, pada prinsipnya adalah mengeliminasi kekurangan konsep yang satu dengan kelebihan yang dimiliki konsep yang lain.
Dalam hal ini model yang digunakan pada fuzzy
neuralnetworknya adalah model Mamdani, Pada himpunan
tegas (crisp), nilai keanggotaan suatu item x dalam suatu
himpunan A, yang sering ditulis dengan μ A [x], memiliki 2 kemungkinan:
• Satu (1) yang berarti bahwa suatu item menjadi anggota dalam suatu himpunan.
• Nol (0) yang berarti bahwa suatu item tidak menjadi anggota dalam suatu himpunan.
Pada himpunan crisp, nilai keanggotaan ada 2 kemungkinan, yaitu 0 atau 1. Sedangkan pada himpunan
fuzzy nilai keanggotaan terletak pada rentang 0 sampai 1.
Semesta pembicaraan adalah keseluruhan nilai yang diperbolehkan untuk dioperasikan dalam suatu variabel
fuzzy. Semesta pembicaraan merupakan himpunan
bilangan real yang senantiasa naik (bertambah) secara monoton dari kiri ke kanan. Nilai semesta pembicaraan dapat berupa bilangan positif maupun negatif. Domain himpunan fuzzy adalah keseluruhan nilai yang diijinkan dalam semesta pembicaraan dan boleh dioperasikan dalam suatu himpunan fuzzy. Fungsi keanggotaan (membership function) adalah suatu kurva yang menunjukkan pemetaan titik-titik input data kedalam nilai keanggotaan yang memiliki interval antara 0 sampai 1. Salah satu cara yang dapat digunakan untuk mendapatkan nilai keanggotaan adalah dengan melalui pendekatan beberapa fungsi, diantaranya :
1. representasi linear 2. representasi segitiga 3. representasi trapesium
Metode mamdani sering juga dikenal dengan nama
metode min–max. Metode ini diperkenalkan oleh Ebrahim Mamdani pada tahun 1975. Untuk mendapatkan keluaran diperlukan 4 tahapan, diantaranya :
1. Pembentukan himpunan fuzzy
Pada metode mamdani baik variabel input maupun variable keluaran dibagi menjadi satu atau lebih himpunan fuzzy.
2. Aplikasi fungsi implikasi
Pada Metode Mamdani, fungsi implikasi yang digunakan adalah minimum
3. Komposisi aturan
Metode yang digunakan dalam melakukan inferensi sistem fuzzy, yaitu Metode max (maximum). Secara umum dapat dituliskan :
μsf[Xi] = max (μsf [Xi], μkf [Xi]) Dimana :
μsf[Xi] = nilai keanggotaan solusi fuzzy sampai aturan ke i
μkf [Xi]) = nilai keanggotaan konsekuan fuzzy aturan ke i 4. Penegasan (defuzzy)
Defuzzyfikasi pada komposisi aturan mamdani dengan
menggunakan metode
centroid. Dimana pada metode ini, solusi crisp
diperoleh dengan cara mengambil titik pusat daerah
fuzzy.
Ada dua keuntungan menggunakan metode
centroid, yaitu:
1. Nilai defuzzyfikasi akan bergerak secara halus sehingga perubahan dari suatu himpunan fuzzy juga akan berjalan dengan halus.
2. Lebih mudah dalam perhitungan.
Selain fuzzy neuralnetwork, dalam suatu kontrol proses seperti pengaturan temperatur juga bisa dilakukan
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS 1 2 1 N I ) 1 2 ( 2 N N P K K
PI(Proporsional dan Integral). Kontroler PI merupakan
kontroler umpan maju yang berfungsi mengolah sinyal kesalahan menjadi sinyal kontrol. Kontroler proporsional ditambah integral (PI) merupakan kontroler yang aksi kontrolernya mempunyai sifat proporsional dan integral terhadap sinyal kesalahan.
1. Kontroler tipe-P (Proportional Controller)
Hubungan sinyal kesalahan dan sinyal kontrol pada kontroler tipe-P dapat dinyatakan sebagai berikut:
) ( ) (t K et u p
atau dalam bentuk transfer function,
p K s E s U ) ( ) (
2. Kontroler tipe-PI (Proportional + Integral Controller) Hubungan sinyal kesalahan dan sinyal kontrol pada kontroler tipe-PI dapat dinyatakan sebagai berikut:
K et
et dt t u() p () 1 () 1 atau dalam bentuk transfer function,
) 1 1 ( ) ( ) ( 1s K s E s U p atau s s K s E s U p 1 1 1) ( ) ( ) (
Berdasarkan hubungan formulasi di atas, parameter kontroler dapat di tuliskan sebagai:
dan
Karena proses pendekatan plant furnace yang sebenarnya merupakan pemanasan orde yang tinggi dan tujuannya untuk mempertahankan kestabilan temperatur pada furnace maka digunakan metode neurofuzzy adaptif.
3. NEUROFUZZY ADAPTIF
Dalam hal ini, kemampuan adaptasi dan belajar dari
neuralnetwork dimanfaatkan oleh fuzzy untuk melakukan
tuning terhadap parameter fuzzy (kekurangan fuzzy yang tidak memiliki kemampuan belajar).
Struktur neurofuzzy adalah menempatkan parameter fuzzy yaitu:
a) Parameter fungsi keanggotaan (center,simpangan dll),
b) Jumlah basis kaidah ke dalam bobot jaringan neural.
Proses belajar neural selanjutnya akan melakukan perubahan terhadap bobot.
Neurofuzzy adalah gabungan dari dua sistem yaitu sistem logika fuzzy dan jaringan syaraf tiruan.Sistem
neurofuzzy berdasar pada sistem inferensi fuzzy yang dilatih
menggunakan algoritma pembelajaran yang diturunkan dari sistem jaringan syaraf tiruan. Oleh karena itu, sistem
neurofuzzy memiliki semua kelebihan yang dimiliki oleh
sistem inferensi fuzzy dan sistem jaringan syaraf tiruan.
Dari kemampuannya untuk belajar maka sistem
neurofuzzy sering disebut neurofuzzy adaptif.
Salah satu bentuk struktur yang sudah sangat dikenal adalah seperti terlihat pada Gambar 3.1. Dalam struktur ini, dapat dilihat struktur neurofuzzy adaptif mamdani
Gambar 3.1. Struktur Neurofuzzy Mamdani 3.1 Metode Pembelajaran
Proses adaptasi yang terjadi dalam sistem Neuro
Fuzzy Adaptif dikenal juga dengan pembelajaran.
Parameter-parameter Neuro (baik premise maupun
consequent) Selama proses belajar akan diperbaharui
menggunakan metode pembelajaran. Metode
pembelajaran yang digunakan dalam sistem
Adaptive Neuro Fuzzy adalah algoritma
pembelajaran hibrid.Algoritma ini terdiri dari dua bagian yaitu bagian arah maju dan bagian arah mundur.Pada bagian arah maju, proses adaptasi dilakukan menggunakan metode LSE dan terjadi pada parameter consequent. Sedangkan pada bagian arah mundur, proses adaptasi dilakukan menggunakan metode gradient-descent dan terjadi pada parameter
premise.
3.2 Least Square Error
Metode Least Square atau Metode Kuadrat
Terkecil digunakan untuk mendapatkan penaksir
koefisien regresi linier. Model regresi linier sederhana dinyatakan dengan persamaan :
Y = 0 + 1X + , model umum Yi = 0 + 1Xi + i , model setiap pengamatan
Metode least square bertujuan mendapatkan penaksir koefisien regresi,yaitu b0 dan b1, yang menjadi-kan jumlah kuadrat error sekecil mungkin.
Kemampuan identifikasi dari neurofuzzy didasarkan pada dua karakteristiknya yaitu:
- Kemampuan aproksimasi fungsi oleh logika fuzzy, - Kemampuan proses belajar oleh jaringan neural
Dua kemampuan tersebut memberikan gambaran bahwa neurofuzzy dapat mendekati dinamika sistem dan melakukan proses belajar untuk meminimalisasi error aproksimasi seperti pada Gambar 3.1.
1 3 4 1 2 s s Yr(s) Ym(s) 10 20 30 40 50 60 70 80 90 100 0 100 200 300 400 500 600 Time Sampling(menit) T em p era tu r(d era ja t Ce lc iu s) Kontroler PLANT Desired Model U y em -+ y + y r m (K) (K) (K) (K) (K) (K) e
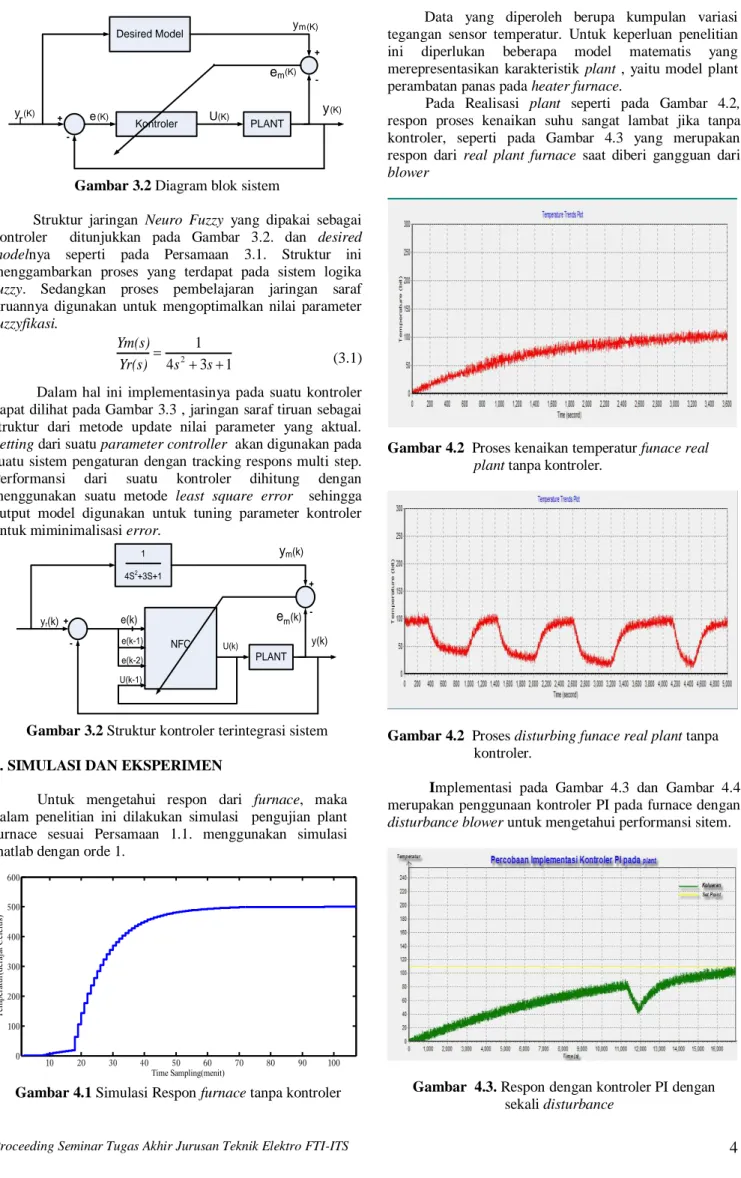
-Gambar 3.2 Diagram blok sistem
Struktur jaringan Neuro Fuzzy yang dipakai sebagai kontroler ditunjukkan pada Gambar 3.2. dan desired
modelnya seperti pada Persamaan 3.1. Struktur ini
menggambarkan proses yang terdapat pada sistem logika
fuzzy. Sedangkan proses pembelajaran jaringan saraf
tiruannya digunakan untuk mengoptimalkan nilai parameter
fuzzyfikasi.
(3.1) Dalam hal ini implementasinya pada suatu kontroler dapat dilihat pada Gambar 3.3 , jaringan saraf tiruan sebagai struktur dari metode update nilai parameter yang aktual.
Setting dari suatu parameter controller akan digunakan pada
suatu sistem pengaturan dengan tracking respons multi step.
Performansi dari suatu kontroler dihitung dengan
menggunakan suatu metode least square error sehingga output model digunakan untuk tuning parameter kontroler untuk miminimalisasi error.
PLANT 1 4S2+3S+1 U(k) ym(k) e (k) -+ y(k) + m NFC -yr(k) e(k) e(k-1) e(k-2) U(k-1)
Gambar 3.2 Struktur kontroler terintegrasi sistem 4. SIMULASI DAN EKSPERIMEN
Untuk mengetahui respon dari furnace, maka dalam penelitian ini dilakukan simulasi pengujian plant furnace sesuai Persamaan 1.1. menggunakan simulasi matlab dengan orde 1.
Gambar 4.1 Simulasi Respon furnace tanpa kontroler
Data yang diperoleh berupa kumpulan variasi tegangan sensor temperatur. Untuk keperluan penelitian
ini diperlukan beberapa model matematis yang
merepresentasikan karakteristik plant , yaitu model plant perambatan panas pada heater furnace.
Pada Realisasi plant seperti pada Gambar 4.2, respon proses kenaikan suhu sangat lambat jika tanpa kontroler, seperti pada Gambar 4.3 yang merupakan respon dari real plant furnace saat diberi gangguan dari
blower
Gambar 4.2 Proses kenaikan temperatur funace real
plant tanpa kontroler.
Gambar 4.2 Proses disturbing funace real plant tanpa
kontroler.
Implementasi pada Gambar 4.3 dan Gambar 4.4
merupakan penggunaan kontroler PI pada furnace dengan
disturbance blower untuk mengetahui performansi sitem.
Gambar 4.3. Respon dengan kontroler PI dengan
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS Gambar 4.3. Respon dengan kontroler PI dengan
dua kali disturbance
Mencoba membuat simulasi dengan input
gelombang sinus dengan amplitudo 10 pada tampilan grafik dengan nilai alpha/ learning rate yang dapat diubah untuk mengetahui kecepatan tracking pada sinusnya.
Gambar 4.4. Tampilan set point masukan sinus
Dengan masukan sinyal sinus seperti Gambar 4.4 maka simulasi tracking sinyal masukan dengan learning rate yang berbeda-beda dapat dilihat pada Gambar 4.5, Gambar 4.6. Dengan demikian maka dapat kita ketahui bahwa Alpha sangat mempengaruhi tracking dari kontrolernya, semakin besar learning ratenya semakin cepat kontroler tracking sinyal sinusnya. Sebaliknya jika learning rate semakin kecil maka semakin lambat kontroler itu melakukan tracking sinyal
pada set pointnya(sinyal sinus).
Gambar 4.5 Tracking sinus dengan alpha 0.0001
Gambar 4.6 Tracking sinus dengan alpha 0.01
5. PENUTUP
Secara garis besar dari penelitian yang telah dilakukan dapat diperoleh manfaat dari pengembangan metode fuzzy neural network dari seluruh parameter termasuk tuning secara simultan. Pendekatan neurofuzzy diimplementasikan pada plant furnace yang telah banyak diketahui di literatur-literatur dan data pada proses pemanasan yang banyak digunakan di industri.
Performansi dari Neurofuzzy adaptive didesain dengan tujuan untuk perbandingan dengan pendekatan yang lainnya. Hasilnya menunjukkan bahwa metodologi yang digunakan sangat efektif untuk membangun linguistik yang akurat dari neurofuzzy model dan dibandingkan dengan pendekatan kontroler lainnya
DAFTAR PUSTAKA
[1] Curtis D. Johnson, Modern Control Engineering,
Prentice Hall, 5th edition, 2002, pp. 65 – 81.
[2] Curtis D. Johnson, Process Control
Instrumentation Technology, University of
Houston, Prentice Hall, 7th edition, 1994, pp. 552 – 572.
[3] Maciejowski J.M , Multivariable Feedback
Design, Addison-Wesley, Cambridge Unuversity
and Pembroke College, 1989, pp. 291-306.
[4] Zadeh L A, A New Approach to the Analysis of
Complex Systems and Decision Process, IEEE
Transaction, System, Man, and Cybernetics, Vol 5, no. 1, 2000 pp.35-50.
[5] Sugeno M, Industrial Applications of Fuzzy
Control, Elsevier Science Pub Co., 1985
[6] Tolle H. , Ersi E. Neurocontrol: LearningControl
Systems Inspired by Neural Architecture and Human Problem Solving, 1999 Springer-Verlag,
Berlin.
[7] Miller W.T. , Real-Time Control Aplication of
Bipped Walking Robot, Proc. INNSWCCN, Portland OR, Vol 3, 1999 pp 153-156.
[8] Schwartz D. G. , Klir G.J. , Fuzzy Logic Flower in
Japan, IEEE Spectrum, July, 1999, pp. 32-35.
[9] Kosko B.(Ed), Neural Network for Signal
Processing, Prentice Hall Englewood Cliffs, NJ,
[10] Kosko B, Neural Network and Fuzzy Systems, Prentice Hall, Englewood Cliffs, NJ, 1992.
[11] J.M. Mendel, Fuzzy sets for words: A New
Beginning, in: Proc. IEEE Int.Conf. on Fuzzy
Systems, St. Louis, MO, May 2003, pp. 37-42. [12] Ogunnaike, Babtunde A. and W. Harmon Ray. 1994.
“Process Dynamics, Modeling and Control”,
Oxford University Press, New York
RIWAYAT HIDUP
Pranata Sulistyawan dilahirkan di
Surabaya pada tanggal 30 Agustus 1986 sebagai anak tunggal dari Almarhum Ayahanda Ir. Soemingan dan Ibunda Trias Sulistyowati. Sebagai putra asli kota pahlawan
Surabaya, penulis menghabiskan
sebagian besar masa hidupnya di kota itu. Memulai riwayat akademis dari SDN Kompleks Perak Barat II no.2, penulis melanjutkan pendidikannya di SLTPN 2 Surabaya dan SMUN 8 Surabaya. Setelah lulus dari SMU, penulis diterima sebagai Mahasiswa Diploma 3 bidang studi computer control di Jurusan Teknik Elektro – FTI, Institut Teknologi Sepuluh Nopember Surabaya pada tahun 2004 melalui jalur tes masuk. Setelah lulus pada tahun 2007 penulis melanjutkan studinya untuk mengambil jenjang Sarjana di Bidang Studi Teknik Sistem Pengaturan, Jurusan Teknik Elektro- FTI, Institut Teknologi Sepuluh Nopember .
Selama kuliah penulis aktif di beberapa organisasi kemahasiswaan, selama di tingkat jurusan D3 Teknik Elektro. Penulis juga aktif sebagai asisten di laboratorium Sistem Kontrol Bidang Studi Teknik Sistem Pengaturan, Jurusan Teknik Elektro. Pada bulan Januari 2010 penulis mengikuti seminar dan sidang Tugas Akhir di Bidang Studi Teknik Sistem Pengaturan Jurusan Teknik Elektro – FTI ITS sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik Elektro.