32 BAB 4
HASIL DAN ANALISIS
4.1 Analisis Hasil Proses Pengolahan Data LiDAR
Setelah seluruh point clouds terklasifikasi ke dalam kelas yang sesuai. Maka dapat dilihat pada gambar di bawah ini, point clouds berwarna biru merupakan kelas high vegetation, point clouds berwarna kuning merupakan kelas medium vegetation, dan point clouds berwarna oranye merupakan kelas ground. Berikut adalah gambar tabel hasil statistik klasifikasi kelas point clouds:
Tabel 4.1 Hasil statistik klasifikasi point clouds
Class Description Points
1 Default 0 2 Ground 136.420 3 Low Vegetation 10.274 4 Medium Vegetation 8.100 5 High Vegetation 445.451 6 Building 0 Total points 600.245
Parameter proses pengklasifikasian point clouds harus tepat (sesuai dengan karakteristik lahan area penelitian) dan juga dengan melakukan uji statistik dan trial error. Ketika input parameter telah memberikan hasil statistik yang terbaik, maka perlu dilakukan pengecekan point clouds dengan draw section dan mem-brush
manual sehingga point terklasifikasi dengan baik. Hasil DTM dihasilkan terdapat pada gambar sebagai berikut:
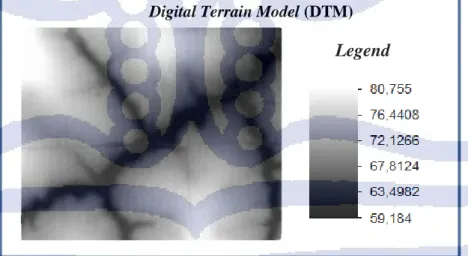
Gambar 4.1 Hasil Digital Terrain Model (DTM)
Digital Terrain Model (DTM)
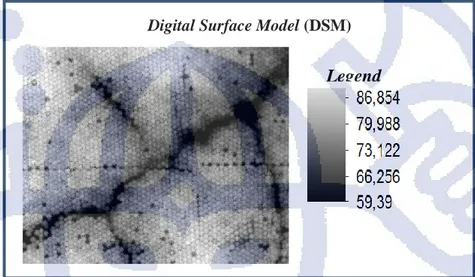
33 Rata-rata tinggi dari CHM yakni 12,5 meter, dengan nilai range antara -0,5676 meter hingga 17,8 meter dan tinggi minimum 3 meter. Pada penelitian ini, hasil DTM dan DSM yang didapat telah dianggap baik ditunjukan dengan ketelitian LiDAR yang telah dikuantifikasi hingga level 15 cm & 30 cm dan proses pengklasifikasian point cloud sudah menggunakan parameter terbaik serta disempurnakan dengan klasifikasi manual dengan melakukan brush sehingga point terklasifikasi ke dalam kelas-kelas yang telah ditentukan. Kemudian didapat hasil interval tinggi DTM yakni pada range 60-80 m dan DSM 60 m sampai dengan 94 m. Namun ketika mengekstrak CHM terdapat tinggi pohon yang minus, dilihat dari value pixel raster terdapat 226 value
Digital Surface Model (DSM)
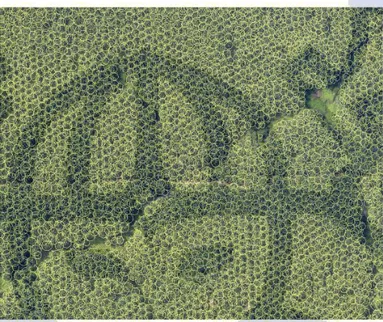
Canopy Height Model (CHM)
Gambar 4.2 Hasil Digital Surface Model (DSM)
Gambar 4.3 Canopy Height Model (CHM) Legend
34 dalam jumlah value 204683 yakni hanya sebesar 0,1%. Hal ini kemungkinan besar disebabkan oleh low points pada data LiDAR. Low points disebut juga noise
(kesalahan/gangguan) pada LiDAR, solusi menghilamgkan low points ialah seharusya point clouds pada data CHM yang memiliki nilai minus tersebut dikelompokan juga menjadi satu kelas baru, yakni kelas Low Points, kemudian kelas tersebut di-delete dan tak akan muncul lagi ketika men-generate DTM, DSM maupun ketika menekstraksi CHM. karena Ground pada lahan tertentu tidak memiliki vegetasi apapun diatasanya. Sehingga ketika data pembentukan CHM (DSM-DTM), hasilnya minus. Faktor lainnya mungkin dikarenakan ketika proses pengklasifikasian titik ground dan vegetasi lainnya masih belum sempurna.
4.2 Analisis Hasil Proses Pendeteksian Pohon
Hasil dari pendeteksian pohon secara otomatis terdeteksi jumlah pohon sebanyak 2.618 pohon pada luasan area kurang lebih 20 hektar. Berdasarkan studi referensi dari aturan penanaman pohon kelapa sawit, biasanya kelapa sawit ditanam dengan jarak tanam 9x9x9 meter, sehingga dalam 1 ha terdapat 130-145 pohon, (Badan Pusat Statistik Sawit, 2012). Dari total lahan studi area seluas ± 20 Ha dan dengan total lahan kosong seluas ± 0,67 Ha. Maka total jumlah pohon diestimasikan berada pada range: 2512 – 2764 pohon sawit. Sehingga 2618 dinyatakan telah masuk dalam
35 Gambar 4.4 Hasil deteksi otomatis poligon pohon kelapa sawit
36 Gambar 4.7 Poligon pohon hasil deteksi otomatis (poligon pohon: hijau) Hasil deteksi pohon kelapa sawit secara otomatis pada gambar 4.4 dan 4.7 merupakan poligon pohon, setiap individu dari poligon pohon kelapa sawit yang berhasil terdeteksi masing-masing memiliki identitas (ID) dari setiap poligon, elevasi (mengacu pada MSL) serta tinggi dari masing-masing pohon yang ditunjukan pada tabel 4.2.
Tabel 4.2 Hasil deteksi individu pohon kelapa sawit secara otomatis FID Elevation Name Perimeter Max_Z Height
0 79,96 RPC 40,899 93,72 13,76 1 80,02 RPC_1 36,009 93,41 13,39 2 79,65 RPC_2 38,365 93,34 13,69 3 78,52 RPC_3 41,971 93,2 14,68 ... ... 2616 59,9 RPC_2616 14,181 64,86 4,960 2617 60,17 RPC_2617 11,671 64,51 4,340
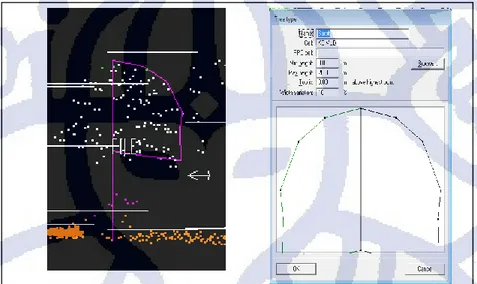
Analisis dari hasil pendeteksian pohon tersebut yakni oarameter pendeteksian pohon secara otomatis harus tepat, khususnya ketika pemodelan bentuk individu pohon. Apabila terlalu lebar, maka sedikit sekali pohon yang akan terdeteksi. Bentuk harus disesuaikan dengan hasil point cloud yang membentuk satu pohon. Sehingga dapat
37 mewakili pendeteksian pohon yang lain. Contoh: Pemodelan bentuk pohon yang terlalu lebar dan hanya dapat mendeteksi 1200 pohon ditunjukan pada gambar di bawah ini:
Gambar 4.8 Bentuk pemodelan kelapa sawit 4.3 Analisis Hasil Proses Validasi Pendeteksian Pohon
Dari hasil validasi terdapat 93 pohon yang terdeteksi pada total 100 pohon hasil validasi manual di area yang sama. Terdapat 7 pohon yang seharusnya terdeteksi namun tidak berhasil terdeteksi. Standar deviasi untuk tinggi sebesar 0,150 meter dan standar deviasi untuk lebar kanopi sebesar 0,790 meter. Hal ini ditunjukkan dalam tabel 4.2 di bawah ini (selengkapnya terdapat pada lampiran A):
Tabel 4.3 Validasi hasil deteksi pohon secara otomatis dan manual
NO Ket Hasil Tinggi Deteksi Tinggi Deteksi Selisih Lebar Kanopi Lebar Kanopi Selisih
Deteksi Otomatis Manual Tinggi Otomatis Manual Lebar Kanopi 1 TILE 1 Ada 13,390 13,400 -0,010 11,468 10,964 0,503 2 Ada 15,950 16,133 -0,183 13,660 12,544 1,116 3 Ada 12,870 12,791 0,079 11,951 11,180 0,770 4 Ada 10,000 10,119 -0,119 8,564 9,930 -1,365 5 Ada 13,310 13,475 -0,165 11,639 11,856 -0,216 ... ... ... ... ... ... ... ... ...
38 Selain analisis mengenai ada atau tidaknya jumlah yang terdeteksi, validasi ini juga memberikan hasil perbedaan tinggi pohon dan perbedaan lebar kanopi pohonnya. Dari keseluruhan data hasil validasi terdapat selisih lebar kanopi yang terbesar dan terkecil sebesar 2,299 meter dan -5,1E-06 meter. Perbedaan selisih lebar kanopi kelapa sawit terbesar terdapat pada tile 3 di nomor 15, dengan besar selisih yakni 2,299 meter dan perbedaan selisih lebar kanopi kelapa sawit terkecil terdapat pada
tile 13 pada nomor 62, dengan besar selisih yakni -5,1E-06 atau sangat mendekati 0 meter.
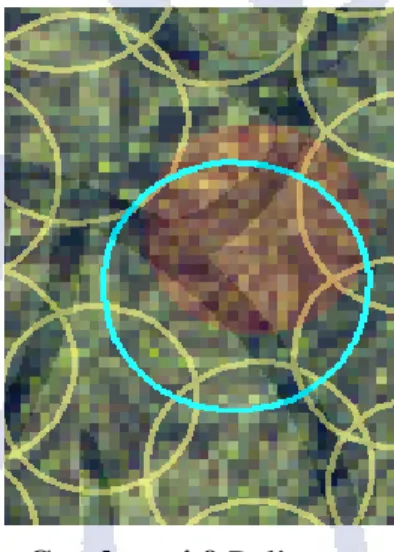
Perbedaan selisih lebar kanopi kelapa sawit terbesar terdapat pada tile 3 di nomor 15. Terlihat pada gambar perbedaan lebar kanopi pohon terlihat cukup besar yakni sebesar 2,299 meter. Selain itu tegakan pohon yang terlalu rapat membuat proses delineasi dapat menjadi kurang tepat karena kanopi antar pohon saling tumpang tindih. Kemudian pada orthophoto tersebut terdapat efek distorsi kamera apabila semakin jauh dari pusat eksposur kamera.
Perbedaan selisih lebar kanopi kelapa sawit terkecil terdapat pada tile 13 pada nomor 62, dengan besar selisih yakni -5,1E-06
atau sangat mendekati 0. Hal ini ditunjukkan oleh gambar dibawah 4.11. perbedaan lebar kanopi pohon telihat sama persis sehingga perbedaan selisih lebar kanopi sebesar hampir 0 meter. Hal ini dikarenakan point clouds pada pohon tersebut sangat banyak. Selain itu tegakan pohon memiliki spasi yang cukup baik sehingga membuat proses delineasi baik. Kemudian pada orthophoto tersebut terdapat efek distorsi kamera apabila semakin jauh dari pusat eksposur kamera.
Gambar 4.9 Poligon otomatis (biru) dan manual
(merah) pada tile 3
Gambar 4.10 Poligon otomatis (biru) dan manual
39 Validasi lainnya yang dilakukan yakni analisis jumlah pohon pada 3 sample tile yang diasumsikan rapat sekali, cukup rapat (renggang) dan renggang serta terdapat lahan kosong. Hasil pendeteksian pohon secara otomatis dari masing-masing sampel tile
tersebut diuji dengan pendeteksian pohon secara manual yakni dengan digitasi secara visual pada setiap pohon dalam perangkat lunak Arc GIS. Hasil dari masing-masing
tile akan dibandingkan dan diprosentasekan perbedaannya.
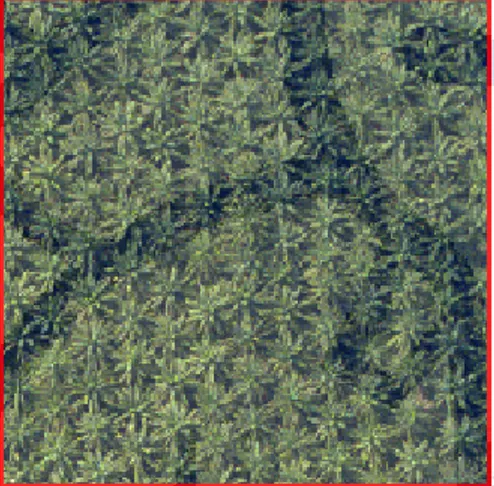
Tile 3 diasumsikan memiliki sebaran pohon kelapa sawit yang cenderung rapat sekali. Setelah dilakukan uji validasi dengan membandingkan jumlah pohon hasil pendeteksian otomatis (130 pohon) dan manual (134 pohon) didapat perbedaan jumlah pohon sebesar empat pohon. Maka dapat dikuantifikasikan persentase kesalahan pada tile yang cenderung rapat sebesar 2,99 %.
Gambar 4.11 Tile 3
Tile 14 diasumsikan memiliki sebaran pohon kelapa sawit yang cenderung cukup rapat dan juga memiliki jarak spasi antar pohon (renggang). Setelah dilakukan uji validasi dengan membandingkan jumlah pohon hasil pendeteksian otomatis (118 pohon) dan manual (117 pohon) didapat perbedaan jumlah pohon sebesar satu pohon atau tidak ada perbedaan sama sekali. Maka dapat dikuantifikasikan persentase kesalahan pada tile yang cenderung cenderung cukup rapat dan juga memiliki jarak spasi antar pohon (renggang) sebesar 0,86 %.
40
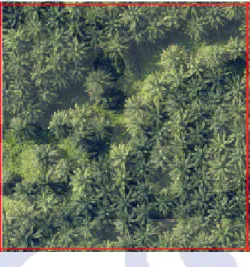
Tile 16 diasumsikan memiliki sebaran pohon yang renggang juga terdapat lahan kosong. Setelah dilakukan uji validasi dengan membandingkan jumlah pohon hasil pendeteksian otomatis (103 pohon) dan manual (108 pohon) didapat perbedaan jumlah pohon sebesar lima pohon. Maka dapat dikuantifikasikan persentase kesalahan pada tile
yang cenderung cenderung cukup rapat dan juga memiliki jarak spasi antar pohon (renggang) sebesar 4,63 %.
.