5
Robot adalah peralatan elektro-mekanik atau bio-mekanik, atau gabungan peralatan yang menghasilkan gerakan otonomi maupun berdasarkan gerakan yang diperintahkan. Robot yang menggunakan peralatan komunikasi dimungkinkan untuk dikendalikan oleh manusia, seperti lengan robot yang pengendaliannya dilakukan melalui komputer. Area yang berbahaya bagi keselamatan jiwa manusia, seperti daerah yang mengandung unsur radioaktif, sulit dijangkau, kemudian kegiatan atau aktivitas manusia yang sifatnya berulang serta membutuhkan kepresisian, dapat digantikan robot. Contoh aplikasi robot dalam kehidupan sehari-hari adalah pesawat terbang, roket, dan komputer. Robot dapat belajar dari dunia kita, mulai dari level rendah sampai dengan level yang paling
tinggi21.
Saat ini hampir tidak ada orang yang tidak mengenal robot, namun
pengertian robot tidaklah dipahami secara sama oleh setiap orang. Sebagian membayangkan robot adalah suatu mesin tiruan manusia (humanoid), meski demikian humanoid bukanlah satu-satunya jenis robot.
Gambar 2.132Robot Beroda
2
Sandy Halim, ST.Merancang Mobile Robot Objek OOPIC-R(Jakarta, Elex Media, 2007) hlm. 1 3Ibid
2.2 Router
2.2.1 PengertianRouter
Menurut defenisinya, router berarti mengirimkan paket diantara jaringan.
Routermemilih koneksi yang paling bagus untuk mengirim paket agar mendekati destinasi. RoutermenggunakanInternet Protocol (IP) packet headersdanrouting table, seperti halnya protokol internal, untuk menentukan jalur yang paling bagus untuk masing-masing paket.43Untuk namarouter sendiri, sebenarnya disesuaikan dengan fungsinya sebagai penyampai pesan melalui jalur yang seharusnya.
Gambar 2.2Router WRT54GL
(Sumber : www:google:com/Gambar)
2.2.2 Jenis-jenisRouter54
1.Routeraplikasi
Router jenis ini adalah sebuah aplikasi yang bisa anda instal pada sistem operasi komputer, sehingga sistem operasi komputer tersebut dapat bekerja seperti router, misalnya aplikasi WinGate, , WinProxy Winroute, SpyGatedan lain-lain.
2.Router Hardware
Router Hardware adalah sebuah hardware yang memiliki kemampuan sepertirouter, maka dengan hardwaretersebut anda dapat membagi IP
Address. Router hardware dapat digunakan untuk membagi jaringan internet pada suatu wilayah, misalnya dari router ini adalah access
4
Jim Geier, 2005,Wireless Networks first-step, Yogyakarta, ANDI, Hal 124. 5
point. Wilayah yang mendapat Ip Address dan koneksi internet disebut
Hot Spot Area.
3.RouterPC
RouterPC adalah sebuah komputer yang dimodifikasi sedemikian rupa sehingga dapat digunakan sebagai router. Untuk membuat sebuah router PC tidak harus menggunakan komputer dengan spesifikasi yang tinggi. Komputer dengan prosesor pentium dua, hard drive 10 GB dan ram 64 serta telah tersediaLAN Card sudah bisa digunakan sebagai
router PC. Komputer yang dijadikan router ini harus diinstal dengan sistem operasi khusus untukrouter. Sistem operasi yang populer untuk
routerPC saat ini adalah Mikrotik.
2.2.3 Prinsip KerjaRouter
Fungsi utama Router adalah merutekan paket (informasi). Sebuah Router
memiliki kemampuan Routing, artinya Router secara cerdas dapat mengetahui
kemana rute perjalanan informasi (paket) akan dilewatkan, apakah ditujukan
untukhostlain yang satu network ataukah berada dinetworkyang berbeda.
Jika paket-paket ditujukan untuk hostpada networklain maka router akan
meneruskannya kenetwork tersebut. Sebaliknya, jika paket-paket ditujukan untuk
hostyang satunetworkmakarouterakan menghalangi paket-paket keluar.65
Gambar 2.3Ilustrasi Prinsip KerjaRouter
(Sumber :http://www.catatanteknisi.com/2011/05/pengertian-cara-kerja-router.html)
6
Pada gambar diatas terdapat 2 buah network yang terhubung dengan sebuah
router.Network sebelah kiri yang terhubung ke port 1 router mempunyai alamat
network 192.168.1.0 dan network sebelah kanan terhubung ke port 2 dari router
dengannetwork address 192.155.2.0.
• Komputer A mengirim data ke komputer C, maka router tidak akan
meneruskan data tersebut kenetworklain.
• Begitu pula ketika komputer F mengirim data ke E, router tidak akan
meneruskan paket data ke network lain.
• Barulah ketika komputer F mengirimkan data ke komputer B, makarouter
akan menruskan paket data tersebut ke komputer B.
2.3 Komunikasi Data
komunikasi data adalah proses pengiriman dan penerimaan data/informasi dari dua atau lebih device (seperti komputer/laptop/printer/dan alat komunikasi lain) yang terhubung dalam sebuah jaringan, baik lokal maupun yang luas, seperti internet.76Salah satu komunikasi yang paling ampuh untuk diimplementasikan dalam sistem komunikasi digital adalah komunikasi dengan memanfaatkan jalur serial RS232. Komunikasi serial hanya menggunakan 2 kabel data yaitu kabel data untuk pengiriman yang disebut transmitte (Tx) dan kabel data untuk penerimaan yang disebut receive (Rx). Kelebihan dari komunikasi serial adalah jarak pengiriman dan penerimaan dapat dilakukan dalam jarak yang cukup jauh dibandingan dengan komunikasi paralel tetapi kekurangannya adalah kecepatan lebih lambat daripada komunikasi paralel, untuk saat ini sedang dikembangkan teknologi serial baru yang dinamakan USB (Universal Serial Bus) yang memiliki kecepatan pengiriman dan penerimaan data lebih cepat dibanding serial biasa.
7
Gambar 2.4.Sistem Komunikasi Serial Mikrokontroler dengan PC (Sumber : http://www.mytutorialcafe.com/Microcontroller%20Serial.htm)
2.3.1 Spesifikasi Komunikasi Serial RS-232
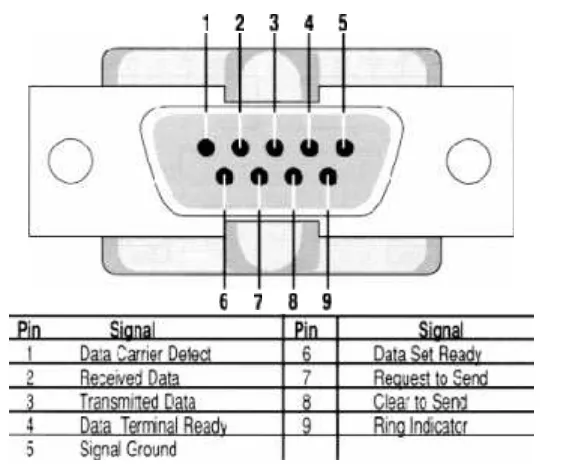
Piranti-piranti yang menggunakan komunikasi serial meliputi:
1. DTE =Data Terminal Equipment,yaitu komputer itu sendiri;
2. DCE =Data Communication Equipment,misalnya modem,plotter
dan lain-lain;
Beberapa parameter yang ditetapkan EIA (Electronics Industry Association)antara lain:
1. Sebuah 'spasi' (logika 0) antara tegangan +3 s/d +25 volt; 2. Sebuah 'tanda' (logika 1) antara tegangan -3 s/d -25 volt;
3. Daerah tegangan antara +3 s/d -3 volt tidak didefinisikan(undefined);
4. Tegangan rangkaian terbuka tidak boleh lebih dari 25 volt (dengan acuan
ground).
Gambar 2.5Spesifikasi pin DB9
(Sumber : http://onyaedward.blogspot.com/2013/04/standar-komunikasi-serial.html)
2.3.2 InterfaceMAX232
Pada mikrokontroler baik yang jenis MCS maupun AVR terdapat Pin-Pin (Port) untuk melakukan komunikasi serial yaitu Rx (Receive) dan Tx (Transmitte). Rx digunakan untuk mengirimkan data secara serial sedangkan Tx digunakan untuk menerima data secara serial pula. Komunikasi serial pada mikrokontroler ini masih menggunakan level sinyal TTL (Transistor-transistor Logic) yaitu sinyal yang memiliki gelombang level datanya antara 0 dan 5 volt. Dengan fasilitas Rx dan TX ini mikrokontroler bisa berkomunikasi secara serial antardeviceatau dengan komputer yang terhubung dengan rangkaian komunikasi serial yang dibuat.87
Jika ingin menggunakan mikrokontroler untuk berkomunikasi dengan komputer atau device lainnya maka Rx dan Tx tidak bisa langsung dihubungkan begitu saja dengan device tersebut karena level sinyal yang digunakan
berbeda-beda. Contohnya komunikasi serial untuk komputer menggunakan sinyal RS232
8
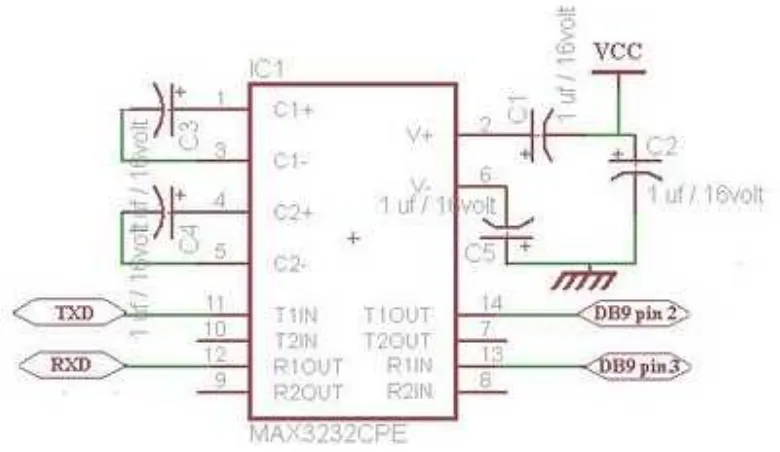
yaitu sinyal yang level sinyalnya berada diantara +25V sampai -25V. Oleh karena itu, jika ingin diharapkan terjadi komunikasi antara mikrokontroler dengan komputer dibutuhkan sebuah buffer yang dapat mengubah sinyal level TTL dari mikrokontroler menjadi sinyal level RS232. Salah satu buffer yang sering digunakan adalah IC MAX232CPE dan menggunakan transistor NPN maupun PNP. Gambar dibawah ini merupakan gambar Rangkaian Komunikasi Serial menggunakan IC MAX232CPE dan transistor.
Gambar 2.6Rangkaian MAX23
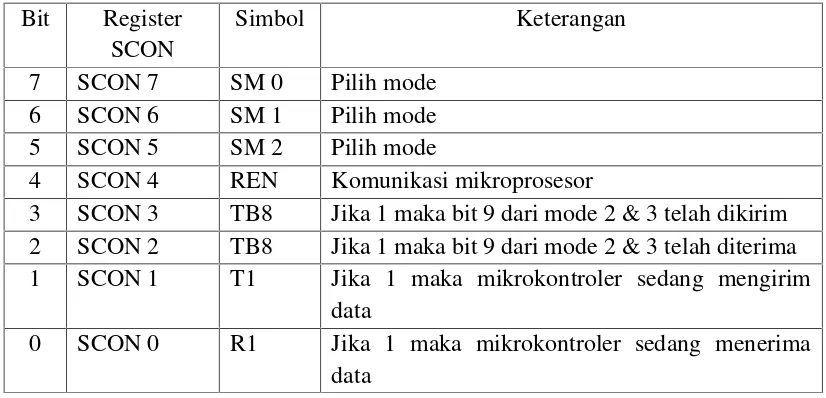
Dibawah ini adalah tabel pengesetan dalam mikrokontroler untuk pengaturan komunikasi serial melalui register SCON (Serial Control Register).
Tabel 2.1Pemilihan Fungsi RegisterSCON
Bit Register SCON
Simbol Keterangan
7 SCON 7 SM 0 Pilih mode
6 SCON 6 SM 1 Pilih mode
5 SCON 5 SM 2 Pilih mode
4 SCON 4 REN Komunikasi mikroprosesor
3 SCON 3 TB8 Jika 1 maka bit 9 dari mode 2 & 3 telah dikirim 2 SCON 2 TB8 Jika 1 maka bit 9 dari mode 2 & 3 telah diterima 1 SCON 1 T1 Jika 1 maka mikrokontroler sedang mengirim
data
0 SCON 0 R1 Jika 1 maka mikrokontroler sedang menerima data
Mikrokontroler AT8951/52/55 mempunyai 4 macam mode operasi (mode 0, mode 1, mode 2, dan mode 3) untuk komunikasi serial. berikut akan dibahas satu persatu dari mode-mode tersebut.
Mode serial port :
1. Pada mode 0, Pin TX mengeluarkan shift clock, dan pin RX dapat menerima maupun mengirim data, dengan format 8 bit data dimulai dengan LSB dulu yang dikirim. Jadi pada saat dikirim data melalui RX maka sekalian pin TX mengirimkan signal clock secara bersamaan.
Baudratenya fixyaitu 1/12 frekuensi osilatornya.
2. Pada mode 1, Pin TX berfungsi untuk mengirim data dan RX berfungsi untuk menerima data, data yang dikirim formatnya 8 bit data dengan LSB dikirim dahulu, serta 1 start bit (berlogika 0) dan 1stop bit(berlogika 1).
Baudratenya variabel tergantung dari nilai yang ada padaregister timer1 maupuntimer2.
3. Pada mode 2, Pin TX berfungsi untuk mengirim data dan RX untuk menerima data, format datanya sama dengan mode 1 hanya saja terdapat
paritynya dapat diset melalui TB8 ( lihat pada SCON). Baud ratenya
hanya ada 2 pilihan yaitu 1/32 atau 1/64 dari frekuensi osilatornya.
4. Pada mode 3 identik dengan mode 2, hanya saja Baud ratenya variabel tergantung nilai yang terdapat pada register daritimer1 dantimer2.
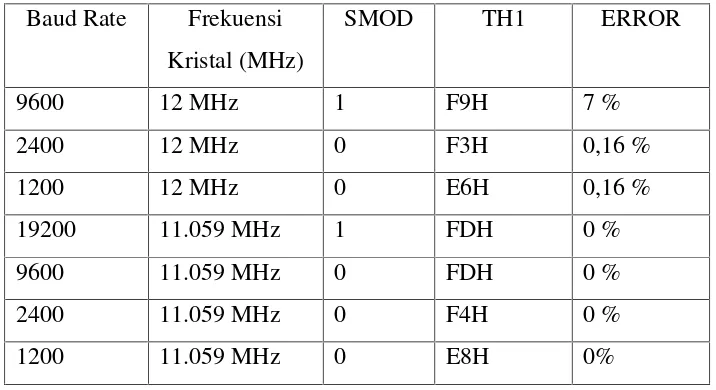
Tabel 2.2PengaturanBaud Rate
Baud Rate Frekuensi Kristal (MHz)
SMOD TH1 ERROR
9600 12 MHz 1 F9H 7 %
2400 12 MHz 0 F3H 0,16 %
1200 12 MHz 0 E6H 0,16 %
19200 11.059 MHz 1 FDH 0 %
9600 11.059 MHz 0 FDH 0 %
2400 11.059 MHz 0 F4H 0 %
1200 11.059 MHz 0 E8H 0%
2.4 Catu Daya (Power Supply)
Daya untuk menjalankan peralatan elektronika dapat diperoleh dari berbagai sumber. Baterai dapat menghasilkan suatu ggl dc dengan reaksi kimia. Foton dari panas atau cahaya yang berasal dari matahari dapat di ubah menjadi energi listrik dc oleh sel-foto (photocell).
Sumber dc seringkali dapat menjalankan peralatan elektronika secara langsung, meskipun mungkin diperlukan beberapa cara meregulasi dan menjaga suatu ggl agar tetap meskipun beban berubah-ubah. Energi paling mudah tersedia yaitu arus bolak-balik, yang harus diubah (disearahkan) mejadi dc berpulsa, yang selanjutnya harus diratakan (disaring) menjadi tegangan yang stabil. Tegangan dc juga memerlukan regulasi tegangan agar dapat menjalankan rangkaian elektronika dengan sebaiknya.98
9
BR1 B80C1000 VI 1 VO 3 G N D 2 U1 7812 VI 1 VO 3 G N D 2 U2 7805 TR1 TRSAT2P2S C1 1000u/50V C2 1000u/50V C3 100u/16V C4 100u/16V D1 D2 D3 D4 12V/50Hz
Gambar 2.7Power Supplydengan IC Regulator
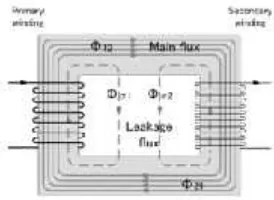
2.4.1 Transformator
Transformator adalah alat statis yang digunakan untuk mentransfer energi dari satu rangkaian ac ke rangkaian lain.109Transformator yang dapat menaikkan suatu nilai tegangan menjadi tegangan yang nilainya lebih besar disebut
Transformator Step-Up, sedangkan transformator yang dapat mengubah atau menurunkan nilai suatu tegangan yang lebih kecil disebut Transformator Step-Down. Transformator yang sering digunakan pada proyek ataupun simulasi berbasis elektronika adalah jenisTransformator Step-Down.
Gambar 2.8Transformator Dasar (Sumber : http://id.wikipedia.org/wiki/Transformator)
Arus ac yang bervariasi diperlukan untuk menghasilkan fluks magnet yang bervariasi pada inti besi sehingga energi listrik dari suatu kumparan ditransfer ke kumparan yang lain. Kumparan yang menerima daya dari pensuplai disebut kumparan primer, sedangkan kumparan yang memberikan daya ke beban disebut kumparan sekunder.
10
2.4.2 Penyearah(Rectifier)
Penyearah (Rectifier) adalah suatu alat yang berfungsi mengubah tegangan masukan arus bolak-balik (AC) menjadi tagangan arus searah (DC) yang berdenyut, dengan kata lain selalu mempunyai tegangan kutub positif dan negatif yang mengeluarkan arus searah.1110
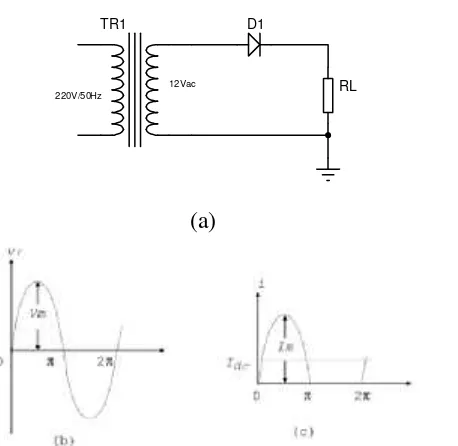
1. Penyearah Setengah-Gelombang1211
Penyearah yang paling sederhana adalah penyearah setengah gelombang, yaitu yang terdiri dari sebuah dioda. Rangkaian penyearah setengah gelombang mendapat masukan dari sekunder trafo yang berupa sinyal AC berbentuk sinus, Vi = Vm Sin Wt. Dari persamaan tersebut, Vm merupakan tegangan puncak atau
tegangan maksimum. Harga Vm ini hanya dapat diukur dengan osiloskop yakni dengan melihat langsung pada gelombangnya. Sedangkan pada umumnya harga yang tercantum pada sekunder trafo adalah tegangan efektif. Hubungan antara tegangan puncak Vm dengan tegangan efektif (Veff) atau tegangan rms (VRMS) adalah:
………..(2.1)
Tegangan efektif atau rms (root-mean-square) adalah tegangan yang terukur oleh voltmeter. Karena harga Vm pada umumnya jauh lebih besar dari pada tegangan cut-in dioda. Prinsip kerja penyearah setengah gelombang adalah bahwa pada saat sinyal input berupa siklus positif maka dioda mendapat bias maju sehingga arus (i) mengalir ke beban(RL) dan sebaliknya bila sinyal input berupa siklus negatif maka dioda mendapat bias mundur sehingga tidak mengalir arus12. Bentuk gelombang dan rangkaian dapat dilihat pada gambar dibawah ini:
11
Rukhan Khanif, 2012, Aplikasi Switch Sebagai Sensor Berat pada Ayunan Bayi Otomatis Menggunakan Smart Relay, hlm 5.
12
Herman Dwi Surjono.Elektronika : Teori dan Penerapannya(Cerdas Ulet Kreatif Publisher:2011) hlm. 28
12Vac RL
TR1
220V/50Hz
D1
(a)
Gambar 2.91312Penyearah Setengah Gelombang (a) rangkaian (b) tegangan sekunder trafo (c) arus beban
2. Penyearah Gelombang Penuh1313
Prinsip kerja rangkaian penyearah gelombang penuh sistem jembatan dapat dijelaskan melalui gambar 2.10. Pada saat rangkaian jembatan mendapatkan bagian positif dari siklus sinyal AC, maka (gambar 2.10b):
- D1 dan D3 hidup (ON), karena mendapat bias maju - D2 dan D4 mati (OFF), karena mendapat bias mundur
Sehingga arus i1 mengalir melalui D1, RL dan D3. Sedangkan apabila jembatan memperoleh bagian siklus negatif, maka (gambar 2.10c):
- D2 dan D4 hidup (ON), karena mendapat bias maju - D1 dan D3 mati (OFF), karena mendapat bias mundur
Sehingga arus i2 mengalir melalui D2, RL dan D4. Arah arus i1 dan i2 yang melewati RL sebagaimana terlihat pada gambar 2.10 b dan c adalah sama, yaitu dari ujung atas RL menujuground. Dengan demikian arus mengalir ke beban (iL) merupakan penjumlahan dari dua arus i1 dan i2, dengan menempati paruh waktu masing- masing (gambar 2.10 d)14.
13
Ibid., hlm. 29 14
BR1
D1
D2 D3
D4
12Vac
RL TR1
220V/50Hz
(a)
Gambar 2.101514Penyearah Gelombang Penuh dengan jembatan (a) Rangkaian dasar; (b) Saat Siklus Positif; (c) Saat siklus Negatif; (d) Arus Beban
2.5 JaringanWireless
Jaringan nirkabel (wireless network) adalah sistem yang berkaitan dengan komunikasi antar sistem komputer tanpa menggunakan kabel. Jaringan nirkabel ini sering dipakai untuk jaringan komputer baik pada jarak yang dekat (beberapa meter, memakai alat/pemancar bluetooth) maupun pada jarak jauh (lewat satelit). Bidang ini erat hubungannya dengan bidang telekomunikasi, teknologi informasi, dan teknik komputer. Jenis jaringan yang populer dalam kategori jaringan nirkabel ini meliputi: Jaringan kawasan lokal nirkabel (wireless LAN/WLAN),
15
dan Wi-Fi.1615Teknologi jaringan nirkabel sebenarnya terbentang luas mulai dari komunikasi suara sampai dengan jaringan data, yang mana membolehkan pengguna untuk membangun koneksi nirkabel pada suatu jarak tertentu. Ini termasuk teknologi infrared, frekuensi radio dan lain sebagainya. Piranti yang umumnya digunakan untuk jaringan nirkabel termasuk di dalamnya adalah komputer, komputer genggam, PDA, telepon seluler, tablet PC dan lain sebagainya. Teknologi nirkabel ini memiliki kegunaan yang sangat banyak. Contohnya, pengguna bergerak bisa menggunakan telepon seluler mereka untuk mengakses e-mail. Sementara itu para pelancong dengan laptopnya bisa terhubung ke internet ketika mereka sedang di bandara, kafe, kereta api dan tempat publik
lainnya. Di rumah, pengguna dapat terhubung ke desktop mereka (melalui
bluetooth) untuk melakukan sinkronisasi dengan PDA-nya.1716
Gambar 2.11ModelWireless
(Sumber : Adhi Kurniawan dkk, Wireless LAN, Universitas Mercu Buana :2009)
2.5.1 PrinsipWirelessLAN
Mirip dengan jaringan Ethernet kabel, sebuah wireless LAN mengirim data dalam bentuk paket. Setiap adapter memiliki nomor ID yang permanen dan unik yang berfungsi sebagai sebuah alamat, dan tiap paket selain berisi data juga menyertakan alamat penerima dan pengirim paket tersebut. Sama dengan sebuah adapter Ethernet, sebuah kartu wireless LAN akan memeriksa kondisi jaringan sebelum mengirim paket ke dalamnya. Bila jaringan dalam keadaan kosong, maka paket langsung dikirimkan. Bila kartu mendeteksi adanya data lain yang sedang
16
http://id.wikipedia.org/wiki/Jaringan_nirkabel 17
menggunakan frekuensi radio, maka kartu akan menunggu sesaat kemudian memeriksanya kembali.
Wireless LAN biasanya menggunakan salah satu dari dua topologi untuk mengatur sebuah jaringan. Pada topologi ad-hoc biasa dikenal sebagai jaringan
peer-to-peer, setiap PC dilengkapi dengan sebuah adapter wireless LAN yang mengirim dan menerima data ke dan dari PC lain yang dilengkapi dengan adapter yang sama, dalam radius 300 kaki (±100 meter). Untuk topologi infrastruktur, tiap PC mengirim dan menerima data dari sebuah titik akses, yang dipasang di dinding atau langit-langit berupa sebuah kotak kecil berantena. Saat titik akses menerima data, maka antena akan mengirimkan kembali sinyal radio tersebut (dengan
jangkauan yang lebih jauh) ke PC yang berada di area cakupannya, atau dapat mentransfer data melalui jaringan Ethernet kabel. Titik akses pada sebuah jaringan infrastruktur memiliki area cakupan yang lebih besar, tetapi membutuhkan alat dengan harga yang lebih mahal.
Gambar 2.12BlokWireless LAN
(Sumber : http://esrt2000.50megs.com/cara_kerja_jaringan_tanpa_kabel_.htm)
frekuensi radio 2,4-GHz, sehingga bandwith radio untuk mengirim data menjadi kecil. Tetapi adapter tersebut menggunakan dua protokol untuk meningkatkan efisiensi dan keamanan dalam pengiriman sinyal:
1. Frequency hopping spread spectrum, dimana paket data dipecah dan dikirimkan menggunakan frekuensi yang berbeda-beda, satu pecahan bersisian dengan lainnya, sehingga seluruh data dikirim dan diterima oleh PC yang dituju. Kecepatan sinyal frekuensi ini sangat tinggi, serta dengan pemecahan paket data maka sistem ini memberikan keamanan yang dibutuhkan dalam satu jaringan, karena kebanyakan radio transceiver
biasa tidak dapat mengikutinya.
2. Direct sequence spread spectrum,sebuah metode dimana sebuah frekuensi radio dibagi menjadi tiga bagian yang sama, dan menyebarkan seluruh paket melalui salah satu bagian frekuensi ini. Adapter direct sequence
akan mengenkripsi dan mendekripsi data yang keluar-masuk, sehingga orang yang tidak memiliki otoritas hanya akan mendengar suara desisan saja bila mereka menangkap sinyal radio tersebut.
2.5.2 Sifat–sifatWireless
Sinyalnya terputus-putus (intermittence) yang disebabkan oleh adanya benda antara pengirim dan penerima sehingga sinyal terhalang dan tidak sampai pada penerima (gejala ini sangat terasa pada komunikasi wireless dengan IR). Bersifatbroadcastakibat pola radiasinya yang memancar ke segala arah, sehingga semua terminal dapat menerima sinyal dari pengirim.
Sinyal pada media radio sangat komplek untuk dipresentasikan kerena sinyalnya menggunakan bilangan imajiner, memiliki pola radiasi dan memiliki polarisasi yang akan mengalami gejala yang disebut multipath yaitu propagasi radio dari pengirim ke penerima melalui banyak jalur yang LOS dan yang tidak LOS/terpantul (Penutup).1817
18
Gambar 2.13Sifat SinyalWireless
(Sumber : Adhi Kurniawan dkk,WirelessLAN, Universitas Mercu Buana :2009)
Arah dari perkembangan wireless data adalah aplikasi multimedia (menggabungkan data, suara dan gambar diam maupun bergerak yang dapat dihubungkan ke unit portabel dan ke jaringan tertentu),multirate(memungkinkan pengoperasian beberapa kecepatan data yang berbeda pada satu pita frekuensi) dan multipower (fleksibelitas memilih sumber daya dari baterai kecil, baterai mobil, kabel PLN atau yang lain dan menyesuaikan besarnya konsumsi daya
dengan kualitas pelayanan yang baik). WLAN merupakan salah satu basis dari arah perkembangan itu. Pita ISM memberikan peluang kepada WLAN dengan RF untuk menawarkan data rate yang cukup tinggi, dan dengan dikomersialkan teknik spread spectrum maka WLAN memiliki peluang yang besar dalam melahirkan sistem WLAN yang sangat baik di waktu yang akan datang.
2.6 Arduino
Arduino adalah sebuah board mikrokontroler yang didasarkan pada IC Atmega328 (datasheet ATmega328). Arduino mempunyai 14 pin digital
Gambar 2.141918Arduino UNO
Arduino memuat semua yang dibutuhkan untuk menunjang mikrokontroler, mudah menghubungkannya ke sebuah computer dengan sebuah kabel USB atau mensuplainya dengan sebuah adaptor AC ke DC atau menggunakan baterai untuk menggunakannya20.19Arduino berbeda dari semua
board Arduinosebelumnya, Arduino tidak menggunakan chip driver FTDI USB-to-serial. Arduino sudah mengalami tiga kali revisi yaitu R1, R2, dan R3. Revisi 3 dari board Arduino memiliki fitur-fitur baru sebagai berikut:
1. Pinout 1.0: ditambah pin SDA dan SCL yang dekat dengan pin AREF dan dua pin baru lainnya yang diletakkan dekat dengan pin RESET, IOREF yang memungkinkan shield-shield untuk menyesuaikan tegangan yang disediakan dariboard.
2. Sirkuit RESET yang lebih kuat 3. Atmega 16U2 menggantikan 8U2
19
John Nussey,Arduino for Dummies, (For Dummies, 2013) hlm. 48 20
Tabel 2.321.20Spesifikasi Arduino
Mikrokontroler ATmega328
Tegangan pengoperasian 5V
Tegangan input yang disarankan
7-12V
Batas tegangan input 6-20V
Jumlah pin I/O digital 14 (6 di antaranya menyediakan keluaran PWM)
Jumlah pin input analog 6
Arus DC tiap pin I/O 40 mA
Arus DC untuk pin 3.3V 50 mA
Memori Flash 32 KB (ATmega328), sekitar 0.5 KB digunakan oleh bootloader
SRAM 2 KB (ATmega328)
EEPROM 1 KB (ATmega328)
Clock Speed 16 Hz
Gambar 2.152221DiagramPin outArduino
21
http://arduino.or.id/hardware/detail_hardware/8 22
2.6.1 Daya (Power)
Arduino dapat disuplai melalui koneksi USB atau dengan sebuah
powersuplly eksternal. Sumber daya dipilih secara otomatis. Suplai eksternal (non-USB) dapat diperoleh dari sebuah adaptor AC ke DC atau battery. Adaptor dapat dihubungkan dengan mencolokkan sebuah center-positive plug yang panjangnya 2,1 mm ke power jack dari board. Kabel lead dari sebuah battery
dapat dimasukkan dalam header/kepala pin Ground (Gnd) dan pin Vin dari konektorpower.
Board Arduino dapat beroperasi pada sebuah suplai eksternal 6 sampai 20 Volt. Jika disuplai dengan yang lebih kecil dari 7 V, maka board Arduino bisa
menjadi tidak stabil. Jika menggunakan suplai yang lebih dari besar 12 Volt, voltage regulator bisa kelebihan panas dan membahayakan board Arduino. Sehinggarangeyang direkomendasikan adalah 7 sampai 12 Volt.
Pin-pin dayanya adalah sebagai berikut:
• Vin, yaitu tegangan input ke Arduino board ketika board sedang
menggunakan sumber suplai eksternal (seperti 5 Volt dari koneksi USB atau sumber tenaga lainnya yang diatur). Kita dapat menyuplai tegangan melalui pin ini, atau jika penyuplaian tegangan melalui power jack, aksesnya melalui pin ini.
• 5V, pin output ini merupakan tegangan 5 Volt yang diatur dari regulator pada
board. Boarddapat disuplai dengan salah satu suplai dari DC power jack (7-12V), USB konektor (5V), atau pin VIN dari board (7-12). Penyuplaian tegangan melalui pin 5V atau 3,3V membypass regulator, dan dapat membahayakanboard. Hal itu tidak dianjurkan.
• 3V3, sebuah suplai 3,3 Volt dihasilkan oleh regulator pada board. Arus
2.6.2 Memori
ATmega328 mempunyai 32 KB (dengan 0,5 KB digunakan untuk
bootloader). ATmega 328 juga mempunyai 2 KB SRAM dan 1 KB EEPROM (yang dapat dibaca dan ditulis (RW/read and written) dengan EEPROM library).
2.6.3 Input dan Output
Setiap 14 pin digital pada Arduino dapat digunakan sebagai input dan output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Fungsi-fungsi tersebut beroperasi di tegangan 5 Volt. Setiap pin dapat memberikan atau menerima suatu arus maksimum 40 mA dan mempunyai sebuah resistor pull-up
(terputus secara default) 20-50 kOhm. Selain itu, beberapa pin mempunyai
fungsi-fungsi spesial:
1. Serial: 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan memancarkan (TX) serial data TTL (Transistor-Transistor Logic). Kedua pin ini dihubungkan ke pin-pin yang sesuai dari chip Serial Atmega8U2 USB-ke-TTL.
2. External Interrupts: 2 dan 3. Pin-pin ini dapat dikonfigurasikan untuk dipicu sebuah interrupt (gangguan) pada sebuah nilai rendah, suatu kenaikan atau penurunan yang besar, atau suatu perubahan nilai. Lihat fungsiattachInterrupt() untuk lebih jelasnya.
3. PWM: 3, 5, 6, 9, 10, dan 11. Memberikan 8-bit PWM output dengan fungsianalogWrite().
4. SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Pin-pin ini mensupport komunikasi SPI menggunakanSPI library.
5. LED: 13. Ada sebuah LED yang terpasang, terhubung ke pin digital 13. Ketika pin bernilai HIGH LED menyala, ketika pin bernilai LOW LED mati.
AREF dan fungsianalogReference(). Di sisi lain, beberapa pin mempunyai fungsi spesial:
1. TWI: pin A4 atau SDA dan pin A5 atau SCL. Mensupport komunikasi TWI dengan menggunakanWire library
Ada sepasang pin lainnya pada board:
2. AREF. Referensi tegangan untuk input analog. Digunakan dengananalogReference().
3. Reset. Membawa saluran ini LOW untuk mereset mikrokontroler. Secara khusus, digunakan untuk menambahkan sebuah tombol reset untuk melindungi yang memblock sesuatu pada board.
2.6.4 Komunikasi
Arduino mempunyai sejumlah fasilitas untuk komunikasi dengan sebuah komputer, Arduino lainnya atau mikrokontroler lainnya. Atmega 328 menyediakan serial komunikasi UART TTL (5V), yang tersedia pada pin digital 0 (RX) dan 1 (TX). Sebuah Atmega 16U2 padachannel boardserial komunikasinya melalui USB dan muncul sebagai sebuah port virtual ke softwarepada komputer. Firmware 16U2 menggunakan driver USB COM standar, dan tidak ada driver eksternal yang dibutuhkan. Bagaimanapun, pada Windows, sebuah file inf pasti dibutuhkan. Software Arduino mencakup sebuah serial monitor yang memungkinkan data tekstual terkirim ke dan dari board Arduino. LED RX dan TX padaboard akan menyala ketika data sedang ditransmit melaluichip USB-to-serial dan koneksi USB pada komputer (tapi tidak untuk komunikasi USB-to-serial pada pin 0 dan 1).
2.6.5 Programming
Arduino dapat diprogram dengan software Arduino (download). Pilih
“Arduino dari menuTools > Board(termasuk mikrokontroler pada board). Untuk lebih jelas, lihat referensi dan tutorial. ATmega328 pada Arduino hadir dengan sebuah bootloader yang memungkinkan kita untuk mengupload kode baru ke
berkomunikasi menggunakan protokol STK500 asli (referensi, file C header). Kita juga dapat membypass bootloader dan program mikrokontroler melalui kepala/header ICSP (In-Circuit Serial Programming), lihat instruksi untuk lebih jelas. ATmega16U2/8U2 diload dengan sebuah bootloader DFU, yang dapat diaktifkan dengan:
1. PadaboardRevisi 1: Dengan menghubungkan jumper solder pada belakang
board(dekat peta Italy) dan kemudian mereset 8U2
2. Pada board Revisi 2 atau setelahnya: Ada sebuah resistor yang menarik garis HWB 8U2/16U2 ke ground, dengan itu dapat lebih mudah untuk meletakkan ke dalam mode DFU. Kita dapat menggunakansoftware
Atmel’s FLIP(Windows) atau pemrogram DFU (Mac OS X dan Linux)
untuk meload sebuah firmware baru. Atau kita dapat menggunakan header
ISP dengan sebuah pemrogram eksternal (mengoverwritebootloaderDFU).
2.6.6 Reset Otomatis (Software)
Arduino didesain pada sebuah cara yang memungkinkannya untuk direset dengan software yang sedang berjalan pada pada komputer yang sedang terhubung. Salah satu garis kontrol aliran hardware (DTR) dari ATmega8U2/16U2 dihubungkan ke garis reset dari ATmega328 melalui sebuah kapasitor 100 nanofarad. Ketika saluran ini dipaksakan (diambil rendah), garis reset jatuh cukup panjang untuk mereset chip. Software Arduino menggunakan kemampuan ini untuk memungkinkan kita untuk mengupload kode dengan mudah menekan tombol upload di software Arduino. Ini berarti bahwa bootloader dapat mempunyai sebuah batas waktu yang lebih singkat, sebagai penurunan dari DTR yang dapat menjadi koordinasi yang baik dengan memulai penguploadan.
Prinisip di atas mempunyai implikasi. Ketika Arduino dihubungkan ke sebuah komputer lain yang sedang running menggunakan OS Mac X atau Linux, Arduino mereset setiap kali sebuah koneksi dibuat dari software (melalui USB). Untuk berikutnya, setengah-detik atau lebih, bootloader sedang berjalan pada Arduino. Ketika Arduino diprogram untuk mengabaikan data yang cacat/salah
beberapa bit pertama dari data yang dikirim ke board setelah sebuah koneksi dibuka. Jika sebuah sketch sedang berjalan pada board menerima satu kali konfigurasi atau data lain ketika sketch pertama mulai, memastikan bahwa software yang berkomunikasi menunggu satu detik setelah membuka koneksi dan sebelum mengirim data ini.
2.6.7 Proteksi Arus Lebih USB
Arduino mempunyai sebuah sebuah sekring reset yang memproteksi port
USB komputer dari hubungan pendek dan arus lebih. Walaupun sebagian besar komputer menyediakan proteksi internal sendiri, sekring menyediakan sebuah
proteksi tambahan. Jika lebih dari 500 mA diterima port USB, sekring secara otomatis akan memutuskan koneksi sampai hubungan pendek atau kelebihan beban hilang.
2.6.8 Bahasa C Arduino
Arduino menggunakan pemrograman dengan bahasa C. Berikut ini adalah sedikit penjelasan yang ditujukan kepada anda yang hanya mempunyai sedikit pengalaman pemrograman dan membutuhkan penjelasan singkat mengenai karakter bahasa C dan softwareArduino. Untuk penjelasan yang lebih mendalam, web Arduino.cc adalah sumber yang lengkap.
2.6.9 Struktur
Setiap program Arduino (biasa disebut sketch) mempunyai dua buah fungsi yang harus ada.
1. void setup( ) { }
Semua kode didalam kurung kurawal akan dijalankan hanya satu kali ketika program Arduino dijalankan untuk pertama kalinya.
2. void loop( ) { }
Fungsi ini akan dijalankan setelah setup (fungsi void setup) selesai. Setelah dijalankan satu kali fungsi ini akan dijalankan lagi, dan lagi secara terus
2.6.10 Syntax
Berikut ini adalah elemen bahasa C yang dibutuhkan untuk format penulisan.
1. //(komentar satu baris)
Kadang diperlukan untuk memberi catatan pada diri sendiri apa arti dari kode-kode yang dituliskan. Cukup menuliskan dua buah garis miring dan apapun yang kita ketikkan dibelakangnya akan diabaikan oleh program.
2. /* */(komentar banyak baris)
Jika anda punya banyak catatan, maka hal itu dapat dituliskan pada beberapa baris sebagai komentar. Semua hal yang terletak di antara dua
simbol tersebut akan diabaikan oleh program.
3. { }(kurung kurawal)
Digunakan untuk mendefinisikan kapan blok program mulai dan berakhir (digunakan juga pada fungsi dan pengulangan).
4. ;(titk koma)
Setiap baris kode harus diakhiri dengan tanda titik koma (jika ada titik koma yang hilang maka program tidak akan bisa dijalankan).
2.6.11 Variabel
Sebuah program secara garis besar dapat didefinisikan sebagai instruksi untuk memindahkan angka dengan cara yang cerdas. Variabel inilah yang digunakan untuk memindahkannya.
1. int(integer)
Digunakan untuk menyimpan angka dalam 2 byte (16 bit). Tidak mempunyai angka desimal dan menyimpan nilai dari -32,768 dan 32,767.
2. long(long)
3. boolean(boolean)
Variabel sederhana yang digunakan untuk menyimpan nilai TRUE(benar) atauFALSE(salah). Sangat berguna karena hanya menggunakan 1 bit dari RAM.
4. float(float)
Digunakan untuk angka desimal (floating point). Memakai 4byte (32 bit) dari RAM dan mempunyai rentang dari -3.4028235E+38 dan 3.4028235E+38.
5. char(character)
Menyimpan 1 karakter menggunakan kode ASCII (misalnya ‘A’ = 65).
Hanya memakai 1 byte (8 bit) dari RAM.
2.6.12 Operator Matematika
Operator yang digunakan untuk memanipulasi angka (bekerja seperti matematika yang sederhana).
1. =
Membuat sesuatu menjadi sama dengan nilai yang lain (misalnya: x = 10 * 2, x sekarang sama dengan 20).
2. %
Menghasilkan sisa dari hasil pembagian suatu angka dengan angka yang lain (misalnya: 12 % 10, ini akan menghasilkan angka 2).
3. +
Penjumlahan
4. –
Pengurangan
5. *
Perkalian
6. /
A. Operator Pembanding
Digunakan untuk membandingkan nilai logika.
1. ==
Sama dengan (misalnya: 12 == 10 adalah FALSE (salah) atau 12 == 12 adalahTRUE(benar))
2. !=
Tidak sama dengan (misalnya: 12 != 10 adalah TRUE (benar) atau 12 != 12 adalahFALSE(salah))
3. <
Lebih kecil dari (misalnya: 12 < 10 adalah FALSE (salah) atau 12 < 12
adalahFALSE(salah) atau 12 < 14 adalahTRUE(benar))
4. >
Lebih besar dari (misalnya: 12 > 10 adalah TRUE (benar) atau 12 > 12 adalahFALSE(salah) atau 12 > 14 adalahFALSE(salah)).
2.6.13 Struktur Pengaturan
Program sangat tergantung pada pengaturan apa yang akan dijalankan berikutnya, berikut ini adalah elemen dasar pengaturan (banyak lagi yang lain dan bisa dicari di internet).
1.if..else,dengan format seperti berikut ini:
if (kondisi) { }
else if (kondisi) { }
else { }
Dengan struktur seperti diatas program akan menjalankan kode yang ada di dalam kurung kurawal jika kondisinya TRUE, dan jika tidak (FALSE) maka akan diperiksa apakah kondisi pada else ifdan jika kondisinyaFALSEmaka kode
2.for, dengan format seperti berikut ini:
for (int i = 0; i < #pengulangan; i++) { }
Digunakan bila anda ingin melakukan pengulangan kode di dalam kurung kurawal beberapa kali, ganti #pengulangan dengan jumlah pengulangan yang diinginkan. Melakukan penghitungan ke atas dengani++atau ke bawahi–.
2.6.14 Digital
1.pinMode(pin, mode)
Digunakan untuk menetapkan mode dari suatu pin, pin adalah nomor pin yang akan digunakan dari 0-19 (pin analog 0-5 adalah 14-19). Mode yang bisa digunakan adalahINPUTatauOUTPUT.
2.digitalWrite(pin, value)
Ketika sebuah pin ditetapkan sebagai OUTPUT, pin tersebut dapat dijadikanHIGH(ditarik menjadi 5 volts) atauLOW(diturunkan menjadiground).
3.digitalRead(pin)
Ketika sebuah pin ditetapkan sebagai INPUT maka anda dapat menggunakan kode ini untuk mendapatkan nilai pin tersebut apakah HIGH
(ditarik menjadi 5 volts) atauLOW(diturunkan menjadi ground).
2.6.15 Analog
Arduino adalah mesin digital tetapi mempunyai kemampuan untuk beroperasi di dalam alam analog. Berikut ini cara untuk menghadapi hal yang bukan digital.
1.analogWrite(pin, value)
Beberapa pin pada Arduino mendukung PWM (pulse width modulation) yaitu pin 3, 5, 6, 9, 10, 11. Ini dapat merubah pin hidup (on)atau mati (off) dengan sangat cepat sehingga membuatnya dapat berfungsi layaknya keluaran analog.
2.analogRead(pin)
Ketika pin analog ditetapkan sebagai INPUT anda dapat membaca keluaran voltase-nya. Keluarannya berupa angka antara 0 (untuk 0 volts) dan 1024 (untuk 5 volts).
2.7 Motor DC (Direct Current)
Motor DC adalah piranti elektronik yang mengubah energi listrik menjadi energi mekanik berupa gerak rotasi. Pada motor DC terdapat jangkar dengan satu atau lebih kumparan terpisah. Tiap kumparan berujung pada cincin belah (komutator).2322Dengan adanya insulator antara komutator, cincin
belah dapat berperan sebagai saklar kutub ganda (double pole, double throw switch). Motor DC bekerja berdasarkan prinsip gaya Lorentz, yang menyatakan ketika sebuah konduktor beraliran arus diletakkan dalam medan magnet, maka sebuah gaya (yang dikenal dengan gaya Lorentz) akan tercipta secara ortogonal diantara arah medan magnet dan arah aliran arus. Mekanisme ini diperlihatkan pada Gambar 2.16 berikut ini.
Gambar 2.162423Mekanisme Kerja Motor DC Magnet Permanen (Sumber : Ismail, Muhammad Afifi, 2013, Aplikasi Motor DC dengan Driver Motor H-Bridge
pada Alat Pemotong Lenjer Kelempang Otomatis, Politeknik Negeri Sriwijaya)
23
Muhammad Ismail Afifi, 2013, Aplikasi Motor DC dengan Driver Motor H-Bridge pada Alat Pemotong Lenjer Kelempang Otomatis, Politeknik Negeri Sriwijaya, Hal 10.
24
2.7.1 Jenis-Jenis Motor DC2524
Berdasarkan jenisnya, Motor DC terdiri dari: 2.7.1.1 Motor DC Shunt
Motor DC jenis ini mempunyai ciri kumparan
penguat medan diparalel terhadap kumparan armatur. Kelebihan dari Motor DC jenis ini yaitu tidak terlalu membutuhkan banyak ruangan karena diameter kawat kecil. Sedangkan kelemahannya yaitu daya keluaran yang dihasilkan kecil karena arus penguatnya kecil.
2.7.1.2 Motor DC Seri
Motor DC jenis ini mempunyai ciri kumparan penguat medan diseri terhadap kumparan armatur. Kelebihan dari Motor DC jenis ini
yaitu daya output yang dihasilkan besar. Sedangkan kelemahannya yaitu arus beban yang diminta sangatlah besar, sesuai dengan beban yang dipikulnya, jika tegangan inputnya tidak stabil maka flux magnit yang dihasilkan oleh kumparan seri tidak stabil pula, sehingga daya output yang dihasilkan tidak stabil.
2.7.1.3 Motor DC Kompon
Pada umumnya Motor DC Kompon dibuat untuk mengurangi kelemahan yang terjadi pada Motor DC Shunt maupun Seri. Jenisnya ada dua macam, yaitu Motor DC Kompon Panjang dan Motor DC Kompon Pendek, ciri khas yang membedakan keduanya yaitu tata letak kumparan penguat medan tambahan diletakkan seri dengan kumparan penguat medan pada Motor DC Shunt dan ini desebut Motor DC Kompon Pendek. Sedangkan pada Motor DC Kompon Panjang, kumparan penguat medan tambahan diletakkan secara seri antara. Kumparan armatur dan kumparan penguat medan shunt pada Motor DC Shunt.
25
2.7.2 Konstruksi Motor DC2625
Bagian-bagian yang penting dari motor dc dapat di tunjukkan pada Gambar 2.17, dimana stator merupakan bagian yang tidak bergerak yang terdiri dari badan motor, sikat-sikat dan inti kutub magnet. Sedangkan rotor merupakan bagian yang bergerak (berputar) dari motor arus searah yang terdiri dari lilitan jangkar, komutator, isolator, dan jangkar. Rotor inilah yang bergerak dimanfaatkan sebagai energi gerak sesuai yang diinginkan.
Gambar 2.172726Konstruksi Motor DC
2.7.3 Bagian–bagian Motor DC2827
2.7.3.1 Motor stator
Stator merupakan bagian dari motor yang permanen atau tidak berputar. Bagian ini menghasilkan medan magnet, baik yang dihasilkan dari koil (elektromagnetik), maupun dari magnet.
26
Sri Rahayu Nopianti, 2011, Kendali Motor DC pada Prototipe Robot Pengangkut Berbasis Mikrokontroller ATMEGA 8535, Politeknik Negeri Sriwijaya, hlm 25.
27
Muhammad Ismail Afifi, Op. Cit, hlm 11. 28
Gambar 2.182928Konstruksi Bagian Stator Motor
2.7.3.2 Rotor dan Jangkar Motor DC
Fungsi dari rotor atau jangkar yaitu untuk merubah energi listrik menjadi energi mekanik dalam bentuk gerak putar. Rotor terdiri dari poros baja dimana tumpukan keping-keping inti yang berbentuk silinder dijepit. Pada inti terdapat alur-alur dimana lilitan rotor diletakkan. Suatu kumparan motor akan berfungsi apabila mempunyai Kumparan medan, kumparan tersebut berfungsi sebagai pengahasil medan magnet. Kumparan jangkar, berfungsi sebagai pembangkit GGL pada konduktor yang terletak pada laur-alur jangkar. Celah udara yang memungkinkan berputarnya jangkar dalam medan magnet.
Gambar 2.193029Konstruksi Rotor dan Jangka Motor
29
bid.,hlm 12. 30
2.7.3.3 Komutator
Konstruksi dari komutator terdiri dari lamel-lamel, antar lamel dengan lamel lainnya diisolasi dengan mica. Gambar 2.20 di bawah ini merupakan gambar komutator pada motor DC.
Gambar 2.20Konstruksi Komutator Motor DC
(Sumber : Ismail, Muhammad Afifi, Aplikasi Motor DC dengan Driver Motor H-Bridge pada Alat Pemotong Lenjer Kelempang Otomatis, Politeknik Negeri Sriwijaya, 2013)
2.7.4 Cara Kerja Motor DC3130
Cara kerja dari motor DC ini dapat diuraikan sebagai berikut:
1. Motor DC mempunyai rotor (bagian yang bergerak) magnet permanen,
dan stator (bagian mantap) yang berupa koil atau gulungan kawat tembaga, dimana setiap ujungnya tersambung dengan komutator. Komutator ini dihubungkan dengan kutub positif (+) dan kutup (-) dari catu daya melalui sikat-sikat.
2. Arus listrik dari kutub positif akan masuk melalui komutator, kemudian berjalan mengikuti gulungan kawat sebelumnya, akhirnya masuk ke kutub negatif dari catu daya. Karena ada medan elektromagnetik maka motor akan berputar.
3. Karena putaran motor, arus listrik didalam kawat akan berjalan bolak-balik, karena jalannnya sesuai dengan medan magnet, maka rotor akan selalu berputar terus menerus selama arus listrik tetep mengalir didalam kawat.
31
Gambar 2.213231Cara Kerja Motor DC
(Sumber : Ismail, Muhammad Afifi, Aplikasi Motor DC dengan Driver Motor H-Bridge pada Alat Pemotong Lenjer Kelempang Otomatis, Politeknik Negeri Sriwijaya, 2013)
2.8 IP Camera[22]32
IP CAMERA (Internet Protocol Camera) adalah kamera video digital
memiliki kemampuan untuk mengirim dan menerima data via jaringan baik lokal
maupun internet. Menurut Wikipedia secara umum, ada dua jenis IP CAMERA :
1. Centralized IP camera
IP camera jenis ini memerlukan Network Video Recorder (NVR) untuk
menangani masalah perekaman, video dan managemen alarm. 2. Decentralized IP camera
Jenis IP camera ini telah memiliki fungsibuilt-in
yang dapat merekam langsung ke media penyimpanan digital seperti
flashdisk, atau media penyimpanan yang terpasang di jaringan.
Gambar 2.22IP Camera TL-SC 2020
(Sumber :http://www.tp-link.com/en/products/details/?model=TL-SC2020)
32
Ibid., hlm 14 22
IP Camera terdiri dari beberapa bagian yaitu :
1. Lensa, fungsinya untuk memfokuskan gambar .
2. Sensor gambar (CCD atau CMOS) : digunakan untuk merubah cahaya ke sinyal listrik.
3. Prosessor pengolah gambar dan kompresi gambar, agar data tidak terlalu besar maka perlu di kompresi.
4. Microcomputer dan ethernet , mengontrol sistem dan menghubungkan ke jaringan komputer.
5. Input Output port, berfungsi untuk mengontrol lensa (fokus, zoom), menggerakan arah kamera, menggerakan relay dan sebagainya.