BAB 2
TINJAUAN PUSTAKA
2.1. Kavitasi
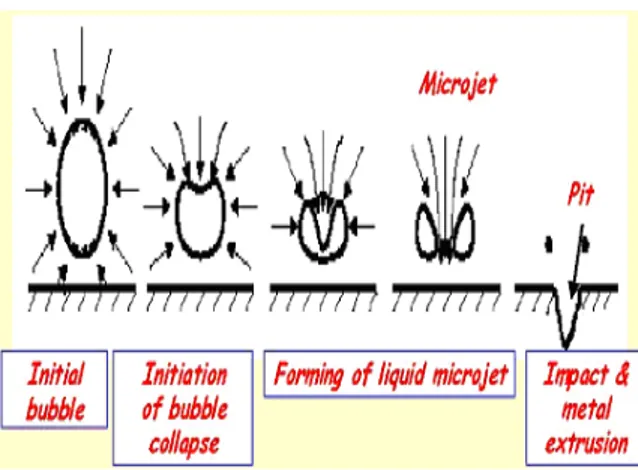
Pada sistem pemipaan yang menggunakan pompa sentrifugal sangat mungkin terjadi kavitasi yang dipengaruhi oleh kecepatan aliran dan perbedaan penampang yang menyebabkan terjadinya penurunan tekanan sampai turun di bawah tekanan uap jenuhnya sehingga menyebabkan terjadinya fenomena yang disebut kavitasi. Kavitasi adalah peristiwa terbentuknya gelembung-gelembung uap di dalam cairan yang dipompa akibat turunnya tekanan cairan sampai di bawah tekanan uap jenuh cairan pada suhu operasi pompa. Gelembung uap yang terbentuk dalam proses ini mempunyai siklus yang sangat singkat. Knapp (Karassik dkk, 1976) menemukan bahwa mulai terbentuknya gelembung sampai gelembung pecah hanya memerlukan waktu sekitar 0,003 detik. Gelembung ini akan terbawa aliran fluida sampai akhirnya berada pada daerah yang mempunyai tekanan lebih besar dari pada tekanan uap jenuh cairan. Pada daerah tersebut gelembung tersebut akan pecah dan akan menyebabkan shock pada dinding dekatnya. Cairan akan masuk secara tiba-tiba ke ruangan yang terbentuk akibat pecahnya gelembung uap tadi sehingga mengakibatkan tumbukan.
Gejala kavitasi yang timbul pada pompa biasanya ada suara berisik dan getaran, unjuk kerjanya menjadi turun, kalau dioperasikan dalam jangka waktu lama akan terjadi kerusakan pada permukaan dinding saluran. Permukaan dinding saluran akan
10
berlubang-lubang karena erosi kavitasi sebagai tumbukan gelembung-gelembung yang pecah pada dinding secara terus-menerus dapat dilihat pada Gambar 2.1.
Gambar 2.1 Proses Kavitasi
2.1.1. Penyebab kavitasi pada pompa sentrifugal
Pompa sentrifugal mempunyai sifat-sifat teknis yang harus dipenuhi agar dapat beroperasi dengan baik. Salah satu permasalahan yang sering terjadi pada pompa tipe ini adalah gagalnya pompa dalam proses priming, sehingga pompa tidak bisa mengisap dan akhirnya gagal pemompaan serta menyebabkan kerusakan pada bagian-bagian pompa.
Ada beberapa penyebab kavitasi pada pompa sentrifugal diantaranya, adalah : 1. Vaporation ( penguapan)
2. Air Ingestion (masuknya udara luar ke dalam sistem) 3. Internal Recirculation (sirkulasi balik di dalam sistem) 4. Turbulance (pergolakan aliran)
5. Vane Passing Syndrome
Cara menghindari proses kavitasi yang paling tepat adalah dengan memasang instalasi pompa dengan NPSH yang tersedia lebih besar dari pada NPSH yang diperlukan. NPSH yang tersedia bisa diusahakan oleh pemakai pompa sehingga nilainya lebih besar dari NPSH yang diperlukan. Berikut ini hal-hal yang diperlukan untuk instalasi pompa.
1. Ketinggian letak pompa terhadap permukaan zat cair yang diisap harus dibuat serendah mungkin agar head statis lebih rendah pula. Pipa isap harus dibuat sependek mungkin. Jika terpaksa dipakai pipa isap yang panjang, sebaiknya diambil pipa yang berdiameter satu nomor lebih besar untuk mengurangi kerugian gesek.
2. Kecepatan aliran pada pipa isap tidak boleh terlalu besar (bagian yang mempunyai kecepatan tinggi maka tekanannya akan rendah).
3. Tidak dibenarkan untuk mengurangi laju aliran dengan menghambat aliran disisi isap.
4. Head total pompa harus ditentukan sedemikian hingga sesuai dengan yang diperlukan pada kondisi operasi yang sesungguhnya.
5. Jika head pompa sangat berfluktuasi, maka pada keadaan head terendah harus diadakan pengamanan terhadap terjadinya kavitasi.
12
6. Menghindari instalasi perpipaan berupa belokan-belokan tajam, karena belokan yang tajam kecepatan fluida akan meningkat sedangkan tekanan fluida akan turun sehingga menjadi rawan terhadap kavitasi.
Gambar 2.2 Kerusakan impeller akibat kavitasi
2.2. Net Positive Suction Head (NPSH)
Gejala kavitasi terjadi apabila tekanan statis suatu aliran zat cair turun sampai dibawah tekanan uap jenuhnya. Kavitasi banyak terjadi pada sisi isap pompa, untuk mencegahnya nilai head aliran pada sisi hisap harus diatas nilai head pada tekanan uap jenuh zat cair pada temperatur bersangkutan. Pengurangan head yang dimiliki zat cair pada sisi isapnya dengan tekanan zat cair pada tempat tersebut dinamakan Net Positif Suction Head (NPSH) atau Head Isap Positif Neto yang dipakai sebagai ukuran keamanan pompa terhadap kavitasi. Ada dua macam NPSH yaitu NPSH tersedia pada instalasi dan NPSH yang diperlukan pompa.
Gejala kavitasi terjadi pada titik terdekat setelah sisi masuk sudu impeller di dalam pompa. Di daerah tersebut, tekanan lebih rendah daripada tekanan pada lubang isap pompa. Hal ini disebabkan zat cair mengalir melalui nozel isap sehingga kecepatannya naik. Dengan kenaikan kecepatan, tekanan zat cair menjadi turun.
2.2.1. Net Positive Suction Head Available (NPSH yang tersedia)
NPSH yang tersedia adalah head yang dimiliki oleh zat cair pada sisi hisap pompa dikurangi dengan tekanan uap jenuh zat cair ditempat tersebut. Dalam hal pompa yang menghisap zat cair dari tempat terbuka, maka besarnya NPSH yang tersedia dapat dituliskan seperti persamaan (2.1) :
ls s sv
h
h
Pv
Pa
h
(2.1) Dimana: hsv = NPSH yang tersedia Pa = Tekanan atmosfir (kg/m2) Pv = Tekanan uap jenuh (kg/m2)γ = Berat zat cair per satuan volume (kg/m3)
hs = Head hisap statis (m), hsadalah positif (bertanda +) jika pompa terletak diatas permukaan zat cair, dan negatif (bertanda -) jika dibawah.
14
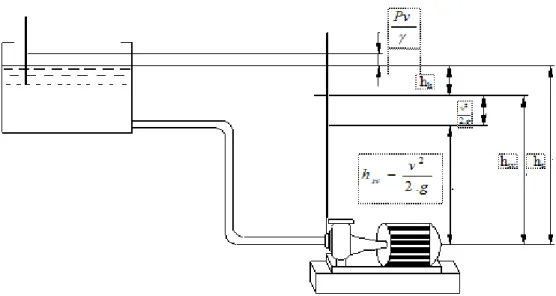
Jika zat cair dihisap dari tangki tertutup, maka harga Pa menyatakan tekanan mutlak yang bekerja pada permukaan zat cair didalam tangki tertutup tersebut. Khususnya jika tekanan diatas permukaan zat cair sama dengan tekanan uap jenuhnya, maka Pa = Pv. Dalam hal pompa yang menghisap zat cair dari tempat terbuka, maka besarnya NPSH yang tersedia dapat dituliskan seperti persamaan (2.2):
ls s
sv
h
h
h
(2.2)Harga hsadalah negatif (-) karena permukaan zat cair didalam tangki lebih tinggi dari pada sisi hisap pompa. Pemasangan pompa semacam ini diperlukan untuk mendapatkan harga NPSH (hsv) positif.
Gambar 2.4 Posisi pompa terletak dibawah permukaan fluida yang diisap
2.2.2.Net Positive Suction Head Required (NPSH yang diperlukan)
Tekanan terendah didalam pompa biasanya terdapat disuatu titik dekat setelah sisi masuk sudu impeller ditempat tersebut, tekanan adalah lebih rendah dari pada tekanan pada lubang hisap pompa. Hal ini disebabkan oleh kerugian head dinosel hisap, kenaikan kecepatan aliran karena luas penampang yang menyempit, dan kenaikan kecepatan aliran karena tebal sudu setempat.
Agar tidak terjadi penguapan zat cair, maka tekanan pada lubang masuk pompa dikurangi dengan penurunan tekanan didalam pompa harus lebih tinggi dari pada tekanan uap zat cair. Head tekanan yang besar sama dengan penurunan tekanan ini disebut NPSH yang diperlukan atau Net Positive Suction Head Required (NPSHR). Besarnya NPSH yang diperlukan berbeda untuk setiap pompa. Untuk suatu pompa tertentu, NPSH yang diperlukan berubah menurut kapasitas dan putarannya.
16
Agar pompa dapat bekerja tanpa mengalami kavitasi, maka harus dipenuhi syarat NPSH yang tersedia lebih besar dari pada NPSH yang diperlukan. Jadi untuk menghindari kavitasi pada pompa harus dipenuhi persyaratan berikut:
NPSH tersedia > NPSH yang diperlukan
Harga NPSH yang diperlukan diperoleh dari pabrik pembuat pompa. Namun untuk penaksiran secara kasar, NPSH yang diperlukan dapat dihitung dengan menggunakan persamaan (2.3). N N sv
H
H
(2.3) Dimana:σ = Koefisien kavitasi Thoma HsvN= NPSH yang diperlukan (m)
HN = Head total pompa pada titik efisiensi maksimum (m).
Kecepatan spesifik sisi hisap (S) dapat juga digunakan sebagai pengganti koefisien kavitasi Thoma dalam menghitung NPSH yang diperlukan. Hubungannya dapat dilihat pada persamaan (2.4).
3 / 2 3 / 4
)
(
N svNQ
S
n
H
(2.4) Dimana: HsvN= NPSH yang diperlukan (m) n = Putaran pompa (rpm)QN = Kapasitas pompa (m3/min)
S = Kecepatan spesifik sisi hisap (m/min).
2.3. Temperatur Fluida
Suhu merupakan variabel yang paling mudah dipantau. Hampir semua fenomena alam akan mengakibatkan terjadinya perubahan suhu. Pengukuran suhu dapat dilakukan baik secara kontak maupun non-kontak. Salah satu fenomena kavitasi pada pompa sentrifugal adalah perubahan suhu fluida akibat proses penguapan pada tekanan uap jenuh. Sebagian besar pengukuran suhu dengan metode kontak dilakukan dengan menggunakan termometer atau termokopel. Sedangkan pengukuran non-kontak menggunakan sensor infra merah (thermography) yang semakin banyak dikembangkan dan mulai banyak digunakan. Jika kita mempertimbangkan pentingnya pengukuran temperatur dan hubungannya dengan tekanan dan flow, maka dengan mudah kita dapat melihat pada pompa yang mengalami kavitasi.
2.3.1. Hubungan tekanan uap jenuh dengan temperatur fluida
Fluida menguap bila tekanannya menjadi sangat rendah atau temperaturnya menjadi sangat tinggi. Setiap perubahan karakteristik fluida tentu akan mempengaruhi sistem pemompaan baik sisi suction maupun sisi discharge yang diperlukan oleh sistem yang dilayani pompa maupun dari performansi pompa
18
hubungan tekanan atmosfer, tekanan uap jenuh fluida, massa jenis dan luas penampang seperti ditunjukkan pada persamaan (2.5).
)
( hA
A
P
A
P
u
atm
(2.5) Dimana:Pu = Tekanan uap dalam Pa (Pascal)
Patm = Tekanan atmosfer
A = Luas penampang pipa (m2)
γ = Berat jenis cairan ( kg/m3)
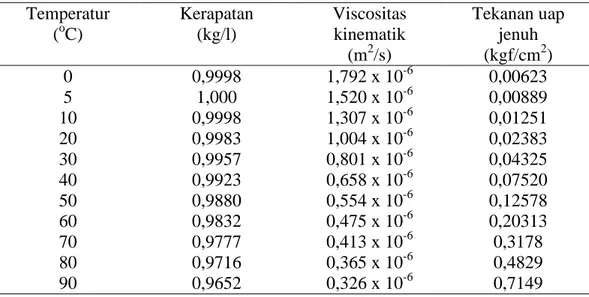
Hubungan tekanan atmosfer dengan tekanan uap jenuh untuk fluida air dapat dilihat pada Tabel 2.1.
Tabel 2.1 Sifat-sifat air ( Air di bawah 1 atm, dan air jenuh diatas 100oC) Temperatur (oC) Kerapatan (kg/l) Viscositas kinematik (m2/s) Tekanan uap jenuh (kgf/cm2) 0 5 10 20 30 40 50 60 70 80 90 0,9998 1,000 0,9998 0,9983 0,9957 0,9923 0,9880 0,9832 0,9777 0,9716 0,9652 1,792 x 10-6 1,520 x 10-6 1,307 x 10-6 1,004 x 10-6 0,801 x 10-6 0,658 x 10-6 0,554 x 10-6 0,475 x 10-6 0,413 x 10-6 0,365 x 10-6 0,326 x 10-6 0,00623 0,00889 0,01251 0,02383 0,04325 0,07520 0,12578 0,20313 0,3178 0,4829 0,7149
100 120 140 160 180 200 220 240 260 280 300 0,9581 0,9431 0,9261 0,9073 0,8869 0,8647 0,8403 0,814 0,784 0,751 0,712 0,295 x 10-6 0,244 x 10-6 0,211 x 10-6 0,186 x 10-6 0,168 x 10-6 0,155 x 10-6 0,150x 10-6 0,136 x 10-6 0,131 x 10-6 0,128 x 10-6 0,127 x 10-6 0,0332 0,0246 0,685 0,303 10,224 15,855 23,656 34,138 47,869 65,468 87,621 (Sumber : Pompa & Kompresor, Sularso, 2006)
2.4. Pola Aliran
Dalam berbagai industri sebagian besar fluidanya mengalir pada pipa-pipa saluran tertutup (closed conduit flow). Masalah utama yang muncul antara lain:
1. Terjadinya gesekan pada dinding pipa.
2. Terjadinya turbulensi karena gerakan relatif dalam molekul fluida yang dipengaruhi oleh viskositas fluida, kecepatan aliran dan bentuk pipa.
3. Terjadinya fluktuasi aliran akibat pemasangan belokan (elbow) dan pengecilan saluran mendadak (sudden contraction).
Dalam suatu aliran yang melewati sistem atau instalasi pipa maka akan terjadi hambatan aliran, hambatan tersebut diakibatkan oleh faktor- faktor bentuk instalasi. Hambatan aliran akan menyebabkan turunnya energi dari fluida tersebut yang sering disebut dengan kerugian tinggi tekan (head loss) atau penurunan tekanan (pressure drop). Kedua faktor ini merupakan pengaruh yang ditimbulkan karena pengaruh gesekan fluida (friction loss) dan perubahan pola aliran terjadi karena fluida harus
20
mengikuti bentuk saluran dan dindingnya. Ketika pipa utama dialiri fluida yang bersifat turbulen, maka fluida dalam pipa akan mengalami pulsasi atau perubahan pola aliran yang dipengaruhi oleh kecepatan aliran meningkat dan tekanannya menurun.
Salah satu besaran non-dimensional yang menggambarkan pola aliran fluida adalah Bilangan Reynolds. Pada tahun 1883 Osborne Reynolds menunjukkan bahwa penurunan tekanan tergantung pada parameter: kerapatan (ρ), kecepatan (U), diameter (D) dan viskositas (µ) absolute yang selanjutnya disebut dengan bilangan Reynolds. Penurunan tekanan merupakan fungsi dari faktor gesekan (λ) dan kekasaran relative dari dinding pada (ε/D), sehingga persamaannya menjadi :
λ= f (Re ε/D) (2.6)
Menurut Henry Darcy (1857) yang melakukan eksperimen aliran dalam pipa, menyatakan bahwa kekarasan mempunyai dampak terhadap pola aliran, sehingga didapatkan faktor gesekan Darcy (λ) dengan persamaan (2.7) :
g D L hV
f 2 2/
(2.7)Aliran fluida dalam pipa yang berbentuk lingkaran terbagi menjadi dua, yaitu aliran laminar dan turbulen. Karakteristik antara kedua aliran tersebut berbeda-beda dari segi kecepatan, debit dan massa jenisnya. Bilangan Reynolds dapat mendefinisikan kedua aliran tersebut, dengan persamaan (2.8) :
UD
UD
Re
(2.8) Dimana:ρ = Kerapatan massa fluida (kg/m3)
U = Kecepatan karakteristik (m/s)
d = Diameter saluran (m)
µ = Viskositas dinamik (kg/m.s)
2.4.1. Klasifikasi Pola Aliran
Pola aliran pada pipa horizontal, ada efek kekuatan gravitasi untuk menggantikan cairan yang lebih berat mendekati pipa bagian bawah. Bentuk lain dari pola aliran dapat bertambah karena efek ini, dimana aliran tersebut dibagi dua lapisan. Banyak kriteria pola aliran yang kita perhatikan baik dari literature dan penelitian-penelitian, tetapi maksud dan tujuannya adalah sama. Deskripsi pola aliran menurut Collier (1980), dengan arah aliran horizontal adalah sebagai berikut:
Aliran gelembung (Bubble flow)
Aliran kantung gas atau sumbat cairan (Plug/Slug flow) Aliran acak (Churn flow)
Aliran cicin kabut tetes cairan ( Wispy-Annular flow) Aliran cincin (Annular flow)
22
Aliran gelembung Aliran kantung gas Aliran srata licin
Aliran srata gelombang Aliran sumbat liquid Aliran cincin Gambar 2.5 Pola aliran pada pipa horizontal
Gambar 2.6 Klasifikasi Pola aliran berdasarkan Reynolds Number ( Chi-2009)
2.5. Aliran Fluida
Aliran fluida (cairan atau gas) di dalam sebuah saluran tertutup atau pipa sangat penting di dalam kehidupan sehari-hari. Beberapa komponen dasar yang berkaitan dengan sistem perpipaan adalah meliputi pipa-pipa itu sendiri, sambungan pipa
(fitting) yang digunakan untuk menyambung masing-masing pipa guna membentuk sistem yang diinginkan, peralatan pengatur laju aliran (katup-katup) dan pompa-pompa atau turbin-turbin yang menambah energi atau mengambil energi dari fluida. Pada aliran fluida di dalam pipa, lapisan fluida pada dinding mempunyai kecepatan nol. Lapisan fluida pada jarak yang semakin jauh dari dinding pipa mempunyai kecepatan yang semakin besar, dengan kecepatan maksimum terbesar terjadi pada pusat pipa.
Gambar 2.7 Daerah masuk aliran sedang berkembang dan aliran berkembang penuh di dalam sebuah sistem pipa.
2.5.1. Aliran Laminar dan Turbulen
Perbandingan gaya-gaya yang disebabkan oleh gaya inersia, grafitasi dan kekentalan dikenal sebagai bilangan Reynolds seperti persamaaan (2.9) :
24
UD
Re
(2.9)Dimana : U = Kecepatan rata-rata aliran (m/s) D = Diameter pipa (m)
ρ = Massa jenis fluida (kg/m3) µ = Viscositas dinamik (m2/s)
Aliran fluida mengikuti bentuknya, sewaktu mengalir aliran fluida membentuk suatu jenis/bentuk jenis dan bentuk dari pergerakan fluidanya. Dalam hal ini, jika nilai Re kecil, partikel-partikel fluida bergerak sepanjang lintasan-lintasan yang halus atau lapisan-lapisan dengan satu lapisan meluncur secara mulus pada lapisan yang bersebelahan yang dikenal sebagai aliran laminar, sedangkan jika partikel-partikel fluida bergerak secara acak (random) baik arahnya maupun kecepatannya tidak terdapat garis edar tertentu yang dapat dilihat, aliran ini disebut aliran turbulen.
(a) (b)
Gambar 2.8 (a) Aliran laminer, (b) Aliran turbulen
Pada pipa:
Aliran laminer terjadi jika Re < 2100 Aliran transisi terjadi jika Re > 2100 Aliran turbulen terjadi jika Re > 4000
2.6. Pompa
Pompa adalah suatu alat atau pompa yang digunakan untuk memindahkan cairan dari suatu tempat ke tempat yang lain melalui suatu media perpipaan dengan cara menambahkan energi pada cairan yang dipindahkan dan berlangsung secara terus menerus. Salah satu jenis pompa pemindah non positif adalah pompa sentrifugal yang prinsip kerjanya mengubah energi kinetis (kecepatan) cairan menjadi energi potensial (dinamis) melalui suatu impeller yang berputar dalam casing. Pompa sentrifugal umumnya dibagi ke dalam empat kelas, yaitu aliran sentrifugal atau radial, campuran, aliran aksial dan turbin regenerative seperti pada Gambar 2.9.
Gambar 2.9 Profil Impeller dan Jenis Pompa
Pompa sentrifugal merupakan jenis pompa yang paling banyak dipakai oleh industri, terutama industri pengolahan dan pendistribusian air. Banyak pompa sentrifugal di desain dengan cara memungkinkan pompa beroperasi secara terus menerus untuk berbulan-bulan bahkan tahunan. Beberapa keunggulan pompa sentrifugal adalah harga yang relatif murah, konstruksi pompa sederhana, mudah
26
pemasangan dan perawatan, kapasitas dan head yang tinggi, kehandalan dan ketahanan yang tinggi.
2.6.1. Karakteristik pompa
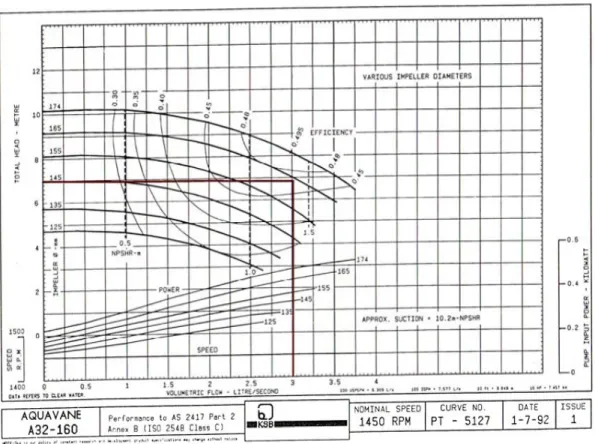
Karakteristik pompa adalah prestasi pompa dalam bentuk grafik hubungan antara parameter-parameter: head (H), daya (N) dan efisiensi (η) terhadap debit (Q), parameter-parameter ini menandai prestasi kerja dan biaya operasi pompa. Karakteristik dari pompa sentrifugal merupakan cara dimana tinggi tekan tekanan diferensial bervariasi dengan keluaran (output) pada kecepatan konstan. Untuk mempertahankan pompa beroperasi pada kecepatan konstan, jumlah aliran yang melalui pompa tergantung pada perbedaan tekanan atau head yang dihasilkan oleh pompa. Karakteristik dapat juga menyertakan kurva efisiensi dan harga brake horse power-nya. Kurva kapasitas tinggi tekan (Gambar 2.10) ditunjukkan sebagai kapasitas peningkatan total tinggi tekan, dimana tinggi tekan pompa mampu untuk dinaikkan atau dikurangi.
Gambar 2.10 Kurva Karakteristik Pompa Sentrifugal Aquavane A32-160
2.6.2. Tinggi tekan (head) pompa
Head pompa adalah energi per satuan berat yang harus disediakan untuk mengalirkan sejumlah zat cair yang direncanakan sesuai dengan kondisi instalasi pompa, atau tekanan untuk mengalirkan sejumlah zat cair, yang umumnya dinyatakan dalam satuan panjang. Menurut persamaan Bernoulli, ada tiga macam head (energi) fluida dari sistem instalasi aliran, yaitu, energi tekanan, energi kinetik dan energi potensial. Hal ini dapat dinyatakan dengan persamaan (2.10) :
28
g
V
Z
P
H
2
2
(2.10)Dimana: H = Head total pompa ( m)
P
= Head tekanan (m)
Z = Head statis total (m)
g
V
.
2
2 = Head kecepatan (m) 2.6.3. Head tekananHead tekanan adalah perbedaan energi tekanan yang bekerja pada permukaan zat cair pada sisi tekan dengan energi tekanan yang bekerja pada permukaan zat cair pada sisi isap. Head tekanan dapat dinyatakan dengan persamaan (2.11) :
d sP
P
P
(2.11) Dimana:
P
= Head tekanan
dP
s
P
= Head tekanan pada permukaan zat cair pada sisi hisap
2.6.4. Head kecepatan
Head kecepatan adalah perbedaan antar energi kecepatan zat cair pada saluran tekan dengan energi kecepatan zat cair pada saluran isap. Head kecepatan dapat dinyatakan dengan persamaan (2.12) :
g
V
g
V
H
d s k2
2
2 2
(2.12)Dimana: Hk = Head kecepatan
g
V
d2
2
= Kecepatan zat cair pada saluran tekan
g
V
s2
2
= Kecepatan zat cair pada saluran isap
2.6.5. Head statis total
Head statis total adalah perbedaan tinggi antara permukaan zat cair pada sisi tekan dengan permukaan zat cair pada sisi isap. Head statis total dapat dinyatakan dengan persamaan (2.13) :
s
d
Z
Z
30 Dimana:
Z = Head statis total
Zd = Head statis pada sisi tekan Zs = Head statis pada sisi isap
Tanda + = Jika permukaan zat cair pada sisi isap lebih rendah dari sumbu pompa
Tanda - = Jika permukaan zat cair pada sisi isap lebih tinggi dari sumbu pompa
2.7. Kerugian Head
Kerugian head yang terjadi pada instalasi pompa terjadi pada pipa dan perlengkapan pipa. Kerugian head pada pipa karena adanya turbulensi air dan gesekan pada sepanjang pipa hal ini disebut sebagai kerugian mayor. Kerugian minor terjadi pada perlengkapan pipa termasuk adanya belokan, penyempitan maupun pembesaran penampang secara mendadak pada pipa, katup dan sambungan sehingga menimbulkan turbulensi sepanjang pipa isap dan pipa tekan. Kerugian energi persatuan berat fluida dalam pengaliran cairan dalam sistem perpipaan disebut sebagai kerugian head (head losses). Head losses terdiri dari mayor head losses (hfs), minor head losses (hm), dan total losses (htot)
Merupakan kerugian head pada fitting dan valve yang terdapat sepanjang sistem perpipaan. Dapat dicari dengan menggunakan persamaan (2.14) :
g
v
f
h
m.
2
2
(2.14)Dimana: hm = Minor losses (m)
f = Koefisien kerugian dari elbow dan valve
Koefisien f tergantung pada bentuk belokan, penyempitan, katup dan sambungannya. Namun, nilai k masih berupa nilai pendekatan, karena sangat dipengaruhi oleh bahan, kehalusan membuat sambungan, serta umur sambungan itu sendiri.
2.7.2. Kerugian head mayor ( Hfs)
Besarnya kerugian Head sepanjang pipa isap dapat dihitung dengan menggunakan persamaan (2.15), Darcy-Weisbach:
g
V
D
L
f
H
f2
2
(2.15)Dimana: Hf = Mayor losses (m)
32 L = Panjang pipa (m)
V = Kecepatan aliran (m/s) D = Diameter dalam pipa (m)
Pipa PVC adalah termasuk pipa licin (smooth) sehingga koefisien gesek untuk pipa licin adalah :
2 / 1 316 , 0 e R f (2.16)
Sedangkan besarnya Reynolds Number (Re) dapat dihitung dengan persamaan (2.17) :
VD
Re
(2.17)Dimana: Re = Reynold Number
= Massa jenis fluida (air) ( kg/m3)V
= Kecepatan rata-rata aliran (m/s)D
= Diameter dalam pipa (m)
= Viscositas absolut cairan (N.s/m2)Apabila aliran laminar (Re < 2000), faktor gesekan (f) dapat dicari dengan pendekatan persamaan (2.18) :
Re
64
Apabila aliran turbulen (Re > 2000), faktor gesekan (f) dapat dicari dengan Moody Diagram. Metode yang umum digunakan untuk menentukan kerugian-kerugian head atau penurunan tekanan adalah dengan menentukan koefisien kerugian, Kt,
g
V
K
h
L L2
2
(2.19) 2.7.3. Total lossesTotal losses merupakan kerugian total sistem perpipaan dapat dihitung dengan pendekatan persamaan (2.20). m f tot
h
h
h
(2.20) ataug
V
D
Le
f
h
tot2
2
(2.21)Dimana: htot = Total losses (m) hf = Total mayor losses (m) hm = Total minor losses (m)
Le/D = Panjang ekivalen dari fitting dan valve ditambah panjang pipa f = Faktor gesekan
34
Analisa getaran (vibration analysis) sudah dianggap sebagai suatu metode yang handal untuk pemantuan kondisi (condition monitoring). Analisa getaran merupakan salah satu alat yang sangat bermanfaat sebagai prediksi awal terhadap adanya masalah pada mekanikal, elektrikal dan proses pada peralatan, mesin-mesin dan sistem proses yang kontinu di pabrik atau industri. Indikator yang baik untuk menentukan apakah suatu peralatan yang berputar dalam kondisi baik adalah vibrasi, semangkin kecil nilai suatu vibrasi semakin baik peralatan tersebut, sebaliknya apabila suatu peralatan yang berputar mempunyai getaran (vibrasi) yang besar atau tinggi maka kondisi peralatan tersebut cukup rawan. Oleh karena itu, suatu peralatan yang berputar sebaiknya memiliki suatu nilai getaran standart dan batasan getaran yang diperbolehkan (dibuat oleh pabrik pembuatan peralatan tersebut), sehingga apabila nilai getaran yang terjadi diluar batasan yang diizinkan maka peralatan tersebut harus menjalani tindakan perawatan (perbaikan). Oleh karena manfaat tersebut, sehingga analisa getaran saat ini menjadi pilihan dalam teknologi predictive maintenance untuk pemantauan tingkat kondisi (condition monitoring) yang sering digunakan.
Disamping manfaatnya dalam hal predictive maintenance, teknik analisa getaran juga digunakan sebagai teknik untuk mendiagnosa, yang dapat diaplikasikan antara lain untuk: acceptance testing, pengendalian mutu, mendeteksi bagian yang mengalami kelonggaran, unbalance, misaligment, pengendalian kebisingan dan mendeteksi kavitasi pada pompa sentrifugal.
2.8.1. Karakterisristik getaran
Getaran secara teknis didefinisikan sebagai gerak osilasi dari suatu objek terhadap posisi awal/diam, seperti yang ditunjukkan pada Gambar 2.11. jika suatu massa digerakkan, maka benda tersebut akan bergerak keatas dan ke bawah secara berulang diantara batas atas dan bawah. Gerakan massa dari posisi awal menuju atas dan bawah lalu kembali keposisi semula, dan akan melanjutkan geraknya disebut sebagai satu siklus getar. Waktu yang dibutuhkan untuk satu siklus disebut sebagai periode getaran. Jumlah siklus pada suatu selang waktu tertentu disebut sebagai frekuensi getaran dan dinyatakan dalam Hertz (Hz).
Gambar 2.11 Sistem getaran sederhana
Frekuensi adalah salah satu karakteristik dasar yang digunakan untuk mengukur dan menggambarkan getaran. Karakteristik lainnya yaitu perpindahan, kecepatan dan percepatan. Setiap karakteristik ini menggambarkan tingkat getaran, hubungan karakteristik ini dapat dilihat pada Gambar 2.12. Perpindahan (displacement)
36
mengindikasikan berapa jauh suatu objek bergetar, kecepatan (velocity) mengindikasikan berapa cepat objek bergetar dan percepatan (acceleration) suatu objek bergetar terkait dengan gaya penyebab getaran. Satuan yang digunakan tiap karakteristik dapat dilihat pada Tabel 2.2. Untuk keperluan pemantauan kondisi dan diagnosis, pengolahan sinyal getaran dilakukan dalam time domain dan frekuensi domain.
Gambar 2.12 Hubungan antara perpindahan, kecepatan dan percepatan getaran Tabel 2.2. Karakteristik dan satuan getaran
Karakteristik Getaran Satuan
Metrik British
Percepatan microns peak-to peak mils peak-to-peak (1µm=0.001mm) (0.001 in) Kecepatan mm/s in/s Percepatan G G
(1g = 980 cm/s2) (1g = 5386 in/s2) Frekuensi cpm, cps, Hz cpm, cps, Hz (Sumber: Maintenance Engineering Handbook)
Pada beberapa kasus seperti getaran pipa aliran akibat turbulensi yang terhantam dinding pipa, maka gaya yang timbul akibat fluida tidak tergantung dari perubahan kecil dari posisi strukturnya terhadap fluida. Dalam permasalahan getaran akibat aliran fluida (pola aliran) , faktor kondisi aliran dan kondisi struktur sangat berpengaruh terhadap bentuk getaran yang terjadi.
2.8.2. Gerak harmonik
Gerak osilasi dapat berulang secara teratur. Jika gerak itu berulang dalam selang disebut waktu yang sama, maka geraknya disebut gerak periodik. Waktu pengulangan
τ disebut dengan periode osilasi dan kebalikannya, f = 1/ τ disebut frekuensi. Jika gerak dinyatakan dalam fungsi waktu x(t), maka setiap gerak periodik harus memenuhi hubungan (t) = x (1+ τ ). Secara umum, gerak harmonik dinyatakan dengan persamaan (2.22) :
t
Sin
A
x
.
2
(2.22)dimana A adalah amplitudo osilasi yang diukur dari posisi setimbang massa, dan τ
adalah periode dimana gerak diulang pada t =τ. Gerak harmonik sering dinyatakan sebagai proyeksi suatu titik yang bergerak melingkar dengan kecepatan tetap pada suatu garis lurus, seperti terlihat pada Gambar 2.13. Dengan kecepatan sudut garis OP sebesarω, perpindahan simpangan x dapat dituliskan sebagai:
t
Sin
A
38
Besaran ω biasanya diukur dalam radian per detik dan disebut frekuensi lingkaran. Oleh karena gerak berulang dalam 2πradian, maka didapat hubungan:
f
t
2
2
(2.24)dengan τ dan f adalah periode dan frekuensi gerak harmonik berturut-turut dan biasanya diukur dalam detik dan siklus per detik.
Kecepatan dan percepatan gerak harmonik dapat diperoleh secara mudah dengan diferensiasi simpangan gerak harmonik, seperti Gambar 2.13. Dengan menggunakan notasi titik untuk turunannya, maka didapat:
)
2
sin(
cos
A
t
A
t
x
(2.25))
sin(
sin
2
A
t
A
t
x
(2.26)Gambar 2.13 Gerak Harmonik Sebagai Proyeksi Suatu titik yang bergerak pada lingkaran
2.8.3. Gerak periodik
Getaran mesin pada umumnya memiliki beberapa frekuensi yang muncul bersama-sama. Gerak periodik dapat dihasilkan oleh getaran bebas sistem dengan banyak derajat kebebasan, dimana getaran pada tiap frekuensi natural memberi sumbangannya. Getaran semacam ini menghasilkan bentuk gelombang kompleks yang diulang secara periodik seperti ditunjukkan pada Gambar 2.14. Gerak harmonik dapat dinyatakan dalam deretan sinus dan cosinus yang dihubungkan secara harmonik. Jika x(t)adalah fungsi periodik dengan periode
, maka fungsi ini dapat dinyatakan oleh deret Fourier sebagai:t a t a t a a t
x( ) 12 0 1cos
1 2cos
2 ... ncos
nt b
t b
t
b1sin
1 2sin
2... nsin
n (2.27) dengan 1 2 1 2
n Gambar 2.14. Gerak periodik gelombang sinyal segiempat dan gelombang pembentuknya dalam domain waktu
40
Pada gelombang segiempat berlaku x(t)= Xpada t =0, dan t =
, dan seterusnya. Deret ini menunjukkan nilai rata-rata dari fungsi yang diskontinu.2.8.4. Getaran bebas (free vibration)
Getaran bebas terjadi jika sistem berosilasi karena bekerjanya gaya yang ada dalam sistem itu sendiri (inherent) dan apabila tidak ada gaya luar yang bekerja. Sistem yang bergetar bebas akan bergetar pada satu atau lebih frekuensi naturalnya yang merupakan sifat dinamika yang dibentuk oleh distribusi massa dan kekakuannya.
Hukum Newton kedua adalah dasar pertama untuk meneliti gerak sistem, pada Gambar 2.15, perubahan bentuk pegas pada posisi kesetimbangan adalah Δdan gaya pegas kΔadalah sama dengan gaya gravitasi w yang bekerja pada massa m.
mg
w
k
(2.28)Hukum Newton kedua untuk gerak diterapkan pada massa m:
)
(
x
k
w
F
x
m
(2.29)dan karena kΔ=w,diperoleh:
kx
x
m
(2.30) frekuensi lingkaranm
k
n
2
, sehingga persamaan (2.23) dapat ditulis:0
2
x
x
n
(2.31)sehingga persamaan umum persamaan diferensial linier orde kedua yang homogen:
0
cos
sin
A
t
B
t
x
n
n (2.32)Perioda natural osilasi dibentuk dari
n
2
, atauk
m
2
(2.33)42
m
k
f
n
2
1
(2.34)2.8.5. Getaran paksa (forced vibration)
Getaran yang terjadi karena rangsangan gaya luar disebut getaran paksa seperti pada Gambar 2.16. Eksitasi ini biasanya dihasilkan oleh ketidak-seimbangan pada mesin-mesin yang berputar.
Gambar 2.16 Sistem yang Teredam Karena Kekentalan Dengan Eksitasi Harmonik
Persamaan diferensial geraknya adalah:
t
F
kx
x
c
x
m
0sin
(2.35)Solusi khusus persamaan diatas adalah keadaan tunak (steady state) dengan frekuensi
ωyang sama dengan frekuensi eksitasi. Solusi khusus dapat diasumsikan berbentuk:
)
sin(
X
t
x
(2.36)dengan A adalah amplitudo osilasi dan фadalah beda fase simpangan terhadap gaya eksitasi. Sehingga diperoleh:
2 2 2
)
(
)
(
k
m
c
Fo
A
(2.37) dan 2 1tan
m
k
c
(2.38)Dengan membagi pembilang dan penyebut persamaan (2.38) dan (2.39) dengan k, diperoleh: 2 2 2
)
(
)
1
(
k
c
k
m
k
Fo
A
(2.39)44
)
(
1
tan
2k
m
k
c
(2.40)Persamaan-persamaan di atas selanjutnya dapat dinyatakan dalam besaran-besaran berikut:
m
k
frekuensi natural osilasi tanpa redaman
n em
C
2
redaman kritis
eC
C
faktor redaman n e ek
C
C
C
k
C
2
Jadi persamaan amplitude dan fasa yang non-dimensional menjadi:
2 2 2
(
2
)
(
1
1
n n oF
Xk
(2.41) 21
2
tan
n n
(2.42)2.9. Pengolahan Data Vibrasi
2.9.1. Data domain waktu (time domain)
Pengolahan data time domain melibatkan data hasil pengukuran objek pemantauan sinyal getaran, tekanan fluida kerja, temperatur fluida kerja maupun aliran fluida kerja. Dalam kasus pengukuran temperatur dengan thermometer yang konvensional karena karakteristik alat ukurnya, maka tidak dapat dilakukan pengukuran temperatur secara dinamik. Demikian pula halnya dengan pengukuran aliran fluida kerja, sehingga untuk memungkinkan pengukuran objek pemantauanberupa sinyal dinamik, maka diperlukan sensor yang memiliki karakteristik dinamik tertentu.
Gambar 2.17 Karakteristik Sinyal Statik dan Dinamik
Hasil pengukuran objek pemantauan dalam domain waktu seperti Gambar 2.17 dapat berupa sinyal:
46 kerjanya) tidak berubah terhadap waktu.
2. Sinyal dinamik, yaitu sinyal yang karakteristiknya berubah terhadap waktu, sehingga tidak konstan.
Sinyal dinamik yang sering ditemui dalam praktek berasal dari sinyal getaran, baik yang diukur menggunakan accelerometer, vibrometer, maupun sensor simpangan getaran. Untuk keperluan pengolahan sinyal getaran dalam time domain, perlu diperhatikan karakteristik sinyal getaran yang dideteksi oleh masing-masing sensor acceleration, kecepatan, dan simpangan getaran (displacement). Time domain digunakan untuk menganalisa karakteristik sinyal getaran secara overall (keseluruhan).
2.9.2. Data domain frekuensi (frequency domain)
Pengolahan data frequency domain umumnya dilakukan dengan tujuan:
a. Untuk memeriksa apakah amplitudo suatu frequency domain dalam batas yang diizinkan oleh standar.
b. Untuk memeriksa apakah amplitudo untuk rentang frekuensi tertentu
Secara konseptual, pengolahan frequency domain dilakukan dengan mengkonversikan data time domain ke dalam frequency domain. Satu bentuk tranformasi yang umum digunakan untuk merubah sinyal dari domain waktu ke domain frekuensi adalah tranformasi Fourier :
dt
e
t
x
X
jt
(
)
)
(
(2.43)Dalam praktiknya proses konversi ini dilakukan menggunakan proses Transformasi Fourier cepat seperti terlihat Gambar 2.18.
Gambar 2.18 Hubungan Time Domain dengan Frequency Domain
Data domain waktu merupakan respon total sinyal getaran, sehingga karakteristik masing-masing sinyal getarannya tidak terlihat jelas. Dengan bantuan konsep deret Fourier, maka sinyal getaran ini dapat dipilah-pilah menjadi komponen dalam bentuk sinyal sinus yang frekuensinya merupakan frekuensi-frekuensi dasar dan
48
harmoniknya. Frequency domain digunakan untuk mengalisa getaran dengan mengatur frekuensi analyzer sesuai dengan frekuensi operasi sistem, dalam hal ini frekuensi sistem divariasikan.
2.10. Standart Vibrasi Pompa Sentrifugal
Sampai saat ini sangat sulit untuk mendapatkan standar vibrasi untuk pompa sentrifugal, bahkan pabrikan pembuat pompa tidak dapat memberikan standar vibrasi dari pompa buatannya. Demikian juga dengan vibrasi yang timbul akibat kesalahan perencanaan dan pengoperasian, seperti tinggi tekan dan kapasitas pompa jauh lebih besar dari tinggi tekan sistem atau instalasi. Sehingga pengoperasian yang dilakukan dengan mengatur secara paksa tinggi tekan dan kapasitas yang akan menimbulkan vibrasi yang besar. Berdasarkan standart ISO 10816-3 untuk standar vibrasi, memberikan batasan-batasan vibrasi berdasarkan kecepatan (velocity) yang dikategorikan dalam beberapa zona dan warna seperti ditunjukkan pada Gambar 2.19.
Gambar 2.19 Standart ISO 10816-3 untuk vibrasi
Dari gambar 2.19 dapat dilihat bahwa sesuai dengan standart vibrasi ISO 10816-3 untuk vibrasi dikategorikan kepada 4 zona yaitu:
a. Zona A berwarna hijau,vibrasi dari mesin sangat baik dan dibawah vibrasi yang diijinkan.
b. Zona B berwarna hijau muda,vibrasi dari mesin baik dan dapat dioperasikan karena masih dalam batas yang diizinkan.
c. Zona C berwarna kuning,vibrasi dari mesin dalam batas toleransi dan hanya dioperasikan dalam waktu terbatas.
d. Zona D berwarna merah,vibrasi dari mesin dalam batas berbahaya dan dapat terjadi kerusakan sewaktu-waktu.
50 2.11. Kerangka Konsep
Hasil yang diperoleh dalam suatu penelitian dipengaruhi oleh variabel-variabel penelitian itu sendiri. Kerangka konsep dalam penelitian ini digambarkan seperti Gambar 2.20. Berdasarkan kerangka konsep tersebut dapat dilihat bahwa permasalahan fenomena kavitasi pada pompa sentrifugal satu tingkat yang diakibat oleh perubahan tekanan isap , yang menjadi variabel bebas dan input alat pengukur getaran dan alat pengukur temperatur fluida, sedangkan yang menjadi subyek penelitian adalah variabel terikat yaitu karakteristik sinyal getaran.
Gambar 2.20 Kerangka Konsep
Permasalahan :
Fenomena kavitasi pada pompa sentrifugal akibat perubahan tekanan isap, turbulensi dan pulsasi
menggunakan parameter sinyal getaran rumapompa akibat adanya perubahan NPSHA
Variabel yang diamati :
Variabel Bebas :
- Head dan Kapasitas
- Tekanan Isap
Variabel terikat :
- Karakteristik sinyal getaran
- Kecepatan aliran
Variabel kontrol :
- Densitas fluida cair
- Pola aliran
Hasil yang diperoleh:
- Simpangan, kecepatan, percepatan dan frekuensi dari
dari tiap perubahan NPSHA.
- Hubungan NPSHA, tinggi tekan , kapasitas dan putaran.
-Hubungan temperatur fluida dalam rumah pompa terhadap
tekanan operasi
- Hubungan pola aliran terhadap karakteristik vibrasinya.
Pengolahan dan analisa data Pompa Sentrifugal Aquavane A32-160
Titik pengukuran getaran
Arah pengukuran getaran
Titik pengukuran temperatur
Arah pengukuran temperatur
Frequency domain dan time domain
NPSHR
Daya dan putaran