88
PENGATURAN KECEPATAN MOTOR DC MENGGUNAKAN KONTROL PID
DENGAN METODE TUNING ZIEGLER NICHOLS
Harrij Mukti K1, Tresna Umar Syamsuri2, Ruwahjoto3, Ika Noer Syamsiana4, Aditya Mahardika Yudha5
1,2,3,5 Prodi Teknik Listrik, Jurusan Teknik Elektro, Politeknik Negeri Malang 4 Prodi Magister Terapan Teknik Elektro, Jurusan Teknik Elektro, Politeknik Negeri Malang
1 [email protected], 2[email protected], 3[email protected], 4[email protected], 5 [email protected]
Abstrak
Kontroler PID (proportional-integral-derivative) sangat banyak digunakan dalam proses pengaturan kecepatan Motor DC, karena strukturnya yang relatif mudah. Kontroler PID merupakan jenis sistem kontrol close loop yang akan menyesuaikan output sistem dengan setting point dengan cara menghitung dan memberikan penyesuaian output yang akan diatur. Ziegler dan Nichols telah mendeskripsikan sebuah prosedur matematis yang sederhana untuk tuning kontroler PID. Penelitian ini menggunakan motor DC 1 kW, 220V, 2000 Rpm, Field 220V, rheostat 8A 11Ω 2 unit dan 1 set rectifier terkendali. Pada paper ini pengaturan kecepatan motor DC yang pertama dilakukan dengan menggubah tahanan dalam (Ra) menggunakan rheostat, yang kedua pengaturan kecepatan dengan mengatur tegangan masukan (V) menggunakan rectifier terkendali dan respon kecepatan motor DC dengan PID kontroler. Penelitian tersebut menggunakan PID kontroler dengan metode tuning Ziegler-Nichols dengan nilai Kp = 164,586; Ki = 1360,21; Kd = 85,01. Hasil pengaturan tahanan dalam (Ra) didapatkan konsumsi daya pada armature relatif konstan. Sedangkan pada pengaturan tegangan, masukan konsumsi daya pada armature berbanding lurus dengan perubahan kecepatan. Dan penelitian ketiga menunjukkan hasil bahwa pembebanan berpengaruh terhadap respon motor, settling time cenderung melambat dengan pembebanan yang meningkat. Namun daya input dan effisiensi pengaturan kecepatan dengan menggatur tegangan masukan (V) dengan rectifier atau PID penggunaanya lebih tepat daripada pengaturan tahanan dalam (Ra) menggunakan rheostat bila motor dioperasikan dibawah nominal. Sedangkan bila motor dioperasikan mendekati nominal, maka dengan pengaturan menggunakan rheostat, rectifier maupun PID hasilnya relatif sama.
Kata kunci :Motor DC, Pengaturan Kecepatan, PID Kontroler, Ziegler-Nichols
I. PENDAHULUAN
Motor DC adalah mesin listrik yang fungsinya mengubah energi listrik menjadi energi mekanik dalam bentuk putaran. Motor DC merupakan motor yang paling ideal digunakan pada sistem pengendalian elektris, karena pengendaliannya dapat dilakukan secara terpisah. Penggunaan motor DC sering kali diaplikasikan pada suatu proses yang membutuhkan pengaturan kecepatan antara lain: elevator, traksi, mesin-mesin produksi, sepeda motor listrik, dan lain-lain.
Putaran motor DC cenderung berubah pada kondisi pembebanan yang berubah-ubah. Kecepatan cenderung menurun pada beban yang meningkat sehingga bila diinginkan suatu kecepatan yang konstan atau stabil perlu adanya suatu pengontrolan kecepatan agar kecepatan motor dapat dipertahankan sesuai kebutuhan.
Pengaturan kecepatan motor DC dapat dilakukan dengan cara mengatur tegangan pada jangkar atau medan maupun
keduanya. Seiring dengan berkembangnya teknologi pengaturan tegangan dapat dilakukan dengan menggunakan rangkaian SCR (silicone controlled rectifier). Metode ini dapat meregulasi tegangan dengan cara memotong tegangan tersebut (Istanto, 2010).
Selain kecepatan, respon suatu motor DC juga dapat diatur dengan menggunakan suatu kontrol sistem. Sebanyak 97% industri menggunakan PID kontroler sebagai kontrol sistem (L.Debourogh, 2001). Kontroler PID (proportional – integral-derivative) sangat banyak digunakan dalam proses pengaturan kecepatan motor DC karena strukturnya yang relatif mudah. Kontroler PID merupakan jenis sistem kontrol close loop yang akan menyesuaikan output sistem dengan setting point dengan cara menghitung dan memberikan penyesuaian output yang akan diatur. Pada sistem kontrol PID respon suatu sistem bergantung oleh besarnya ketiga parameter tersebut yaitu: nilai proportional (Kp), nilai integral (Ki) dan nilai derivative (Kd).
89 Penggunaan kontroler PID dalam suatu sistem mempunyai kelemahan, yakni bahwa parameter-parameter dalam kontroler harus selalu diubah (tuned up) bila terjadi perubahan didalam sistem, perubahan tersebut akan menyebabkan terjadinya tuning kembali dari parameter – parameter PID untuk mempertahankan kondisi yang sudah ditentukan. Perubahan tersebut bisa terjadi karena faktor pembebanan yang berubah, sehingga penting untuk mengetahui sebarapa besar efek pembebanan pada respon PID. Ziegler dan Nichols telah mendeskripsikan sebuah prosedur matematis yang sederhana. Prosedur metode pertama dan kedua masing-masing adalah untuk tuning parameter kontroler PID.
Oleh karena itu diharapkan setelah motor DC diberi sistem kontrol PID dengan metode tuning Ziegler-Nichols, kecepatan motor akan selalu konstan dengan error kecepatan dibawah 5% sesuai dengan setting kecepatan. Maka dari itu penelitian ini mengambil judul “Pengaturan Kecepatan Motor DC Menggunakan Kontrol PID dengan Metode Tuning Ziegler Nichols”.
II. TINJAUANPUSTAKA
A. Motor DC
Gambar 1. Rangkaian Skematik Motor DC
Dari gambar 1 datas maka didapat persamaan: (1) Dimana merupakan kecepatan rotor dalam rad/s dan merupakan konstanta yang didapat dari:
(2) Dari persamaan (1) dapat disimpulkan bahwa berbanding lurus dengan dan bila digabungkan dengan persamaan 2 maka berbanding terbalik dengan (Ong, 1998)
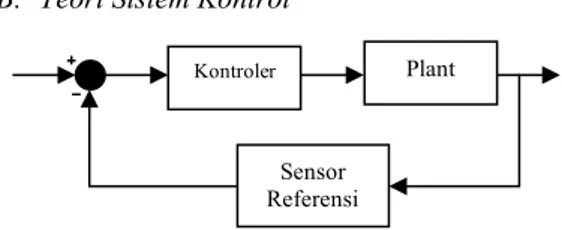
B. Teori Sistem Kontrol
Gambar 2. Konsep dasar sistem kontrol feedback loop (close loop)
Pada sistem kontrol close loop, sensor akan memonitor output dari Plant yang akan digunakan untuk menyesuaikan agar sesuai dengan set point (sinyal referensi).
Sistem ini sangat baik bila digunakan pada kondisi dinamis. Sistem kontrol close loop yang idela akan menghilangkan semua error yang timbul pada sistem, dan pada sistem ini akan menghasilkan respon yang sesuai dengan keinginan karena dapat diatur pada kontroler (Mohamed,2008). C. Kontroler PID
Kontroler PID (proportional – integral-derivative) sangat banyak digunakan dalam proses pengaturan kecepatan Motor DC, karena strukturnya yang relatif mudah. Kontroler PID merupakan jenis sistem kontrol close loop yang akan menyesuaikan output sistem dengan setting point dengan cara menghitung dan memberikan penyesuaian output yang akan diatur. Rumus dasar kontroler PID adalah:
( 3)
Perhitungan kontroler PID (algoritma kontroler PID) terdiri dari 3 parameter yakni propotional,integral dan derivative. Proposional akan memberikan reaksi pada error yang terjadi saat itu sedangkan integral akan memberikan reaksi pada jumlah error yang terjadi dan derivative akan memberikan reaksi dengan perubahan error yang telah terjadi. Perhitungan ini digunakan untuk mengatur agar output sistem sesuai dengan setting point dan responya sesuai dengan yang diinginkan. (Mohamed,2008).
D. Metode Tuning Ziegler-Nichols
Ziegler dan Nichols telah mendeskripsikan sebuah prosedur matematis yang sederhana. Prosedur metode pertama dan kedua masing-masing adalah untuk tuning kontroler PID. Prosedur-prosedur ini sekarang diterima sebagai standar dalam praktek sistem kontrol. Kedua teknik tersebut membuat asumsi pada model sistem, tetapi tidak perlu mengetahui model ini secara khusus. Rumus Ziegler-Nichols untuk menentukan pengendali didasarkan pada respon step pada plant.
Metode pertama diterapkan untuk plant dengan respon step dari bentuk yang ditampilkan pada Gambar 4. Jenis respon khas dari sistem urutan pertama dengan keterlambatan transportasi, seperti akibat yang oleh aliran fluida dari tangki di sepanjang jalur pipa. Hal ini juga khas plant terdiri dari serangkaian sistem urutan pertama.
Respon ini ditandai oleh dua parameter, L waktu tunda dan T waktu konstan. Ini ditemukandengan menggambar garis singgung dengan respon langkah pada titik belok dan mencatat persimpangan nya dengan sumbu waktu dan nilai steady state.
Parameter kontrol Ziegler dan Nichols berikut didasarkan pada model ini:
f r f a a a
R
I
K
I
V
=
+
w
rw
K
f a f fI
I
K
=
t
rw
aV
rw
t
ò
+
+
=
p it ddt
de
K
dt
t
e
K
t
e
K
t
u
0)
(
)
(
)
(
Kontroler Plant Sensor Referensi90 Tabel I. Rumus Metode Ziegler-Nichols Metode Pertama
PID Type Kp Ti = Kp/Ki Td = Kd/Kp
P ∞ 0
PI 0
PID
Gambar 3. Kurva respon metode pertama Ziegler-Nichols
Metode kedua target plant yang dapat menjadi tidak stabil di bawah kendali proporsional. Teknik ini dirancang untuk menghasilkan sistem loop tertutup dengan 25% overshoot. Hal ini jarang dicapai, Ziegler dan Nichols menentukan penyesuaian berdasarkan model plant tertentu.
Tabel II. Rumus metode Ziegler-Nichols metode kedua
PID Type Kp Ti = Kp/Ki Td = Kd/Kp
P ∞ 0
PI 0
PID
III. METODEPENELITIAN A. Tahapan Penelitian
Secara umum penelitian dilakukan dengan tahapan sebagai berikut :
1. Pemodelan Motor DC
Secara umum torsi yang dihasilkan oleh motor DC proposional dengan reaksi jangkar dan besarnya reaksi medan yang timbul di belitan medan. Pada percobaan ini diasumsikan medan magnet yang timbul konstan, sehingga torsi motor hanya proposional dengan reaksi jangkar (Ctms,2013; Ong, 1998).
2. Pemodelan Sistem Kontrol
Karena motor dijalankan pada suatu sistem kontrol, sistem juga harus dimodelkan. Untuk mencari parameter PID maka digunakan metode Ziegler-Nichols, dan untuk mencari nilai Kcr dan Pcr dengan menggunkan Routh Hurwitz.
3. Pengujian
Pengujian yang dilakukan dalam penelitian ini adalah pengaturan kecepatan menggunakan rheostat, pengaturan kecepatan menggunakan rectifier terkendali serta respon
kecepatan motor DC. Pengujian dilakukan pada keadaan motor DC tanpa beban dan berbeban.
B. Pengujian
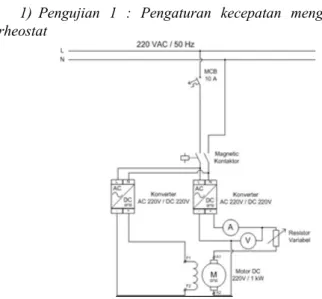
1) Pengujian 1 : Pengaturan kecepatan menggunakan rheostat
Gambar 4. Rangkaian pengujian 1
Pengujian I dilakukan pengaturan kecepatan dengan cara menambah tahanan dalam, ini dilakukan dengan mengeser rheostat. Dan dalam hal ini parameter medan dibuat tetap (fixed), lalu diukur nilai daya pada armature.
2) Pengujian 2 : Pengaturan kecepatan menggunakan rectifier terkendali
Gambar 5. Rangkaian pengujian 2
Pada Pengujian II sama seperti sebelumnya parameter medan (field) dibuat tetap tetapi pengaturan kecepatan dilakukan dengan mengubah nilai tegangan masukan (V), lalu diukur nilai daya pada armature. L T L T 9 . 0 0L.3 L T 2 . 1 2L 0.5L cr K 5 . 0 cr K 45 . 0 2 . 1 cr P cr K 6 . 0 2 cr P 8 cr P
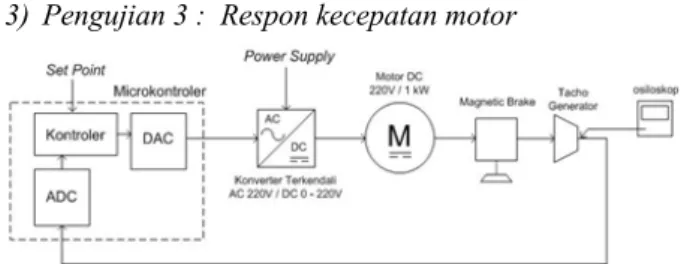
91 3) Pengujian 3 : Respon kecepatan motor
Gambar 6. Rangkaian pengujian 3
Sistem kontrol, menggunakan sistem kontrol close loop dengan kontroler PID yang diimplementasikan menggunakan mikrokontroler(Dogan, 2006). Parameter medan (field) dibuat tetap sehingga pengaturan hanya dilakukan dengan pengaturan tegangan armature, percobaan ini ditujukan untuk mengetahui respon motor DC
IV. HASILPENELITIANDANPEMBAHASAN
A. Pemodelan Motor
Dari hasil pengukuran parameter motor, maka didapat nilai sebagai berikut:
(J) moment inersia rotor : 0,02215 kg.m2
(b) motor vicous friction constant : 0,00331 N.m.s
( ) motor torque constant : 0,44 N.m/Amp
(R) armature resistance : 2,6 Ohm
(L) armature inductance : 0,027 H
Hasil pengukuran ini dimasukan ke dalam transfer fungtion motor DC dan diperoleh yaitu:
Transfer function:
B. Pemodelan sistem kontrol
Karena motor dijalankan pada suatu sistem kontrol, sistem juga harus dimodelkan. Dengan menggunakan osiloskop storage maka didapatkan hasil step respon pada sistem kontrol hasilnya adalah sebagai berikut:
Gambar 7. Plot step respon
Dari Gambar 7, maka didapat persamaan garis respon sistem yaitu:
dari persamaan tersebut ditransformasikan ke fungsi laplace yang hasilnya:
Sehingga sistim kontrol ini memiliki transfer fungtion yaitu:
Lalu, Transfer function:
Ket: 1/s merupakan fungsi “s” step respon Jadi pemodelan sistem ini menjadi : Transfer function:
Untuk mencari parameter PID maka digunakan metode Ziegler-Nichols, dan untuk mencari nilai Kcr dan Pcr dengan menggunakan Routh Hurwitz.
C. Mencari nilai waktu kritis (Kcr). S3 0,3322 223,8
S2 46,73 100,3+114,4 K
S1 1042,85 – 38,003 K
S0 100,3 + 114,4 K
Agar mencapai kestabilan kolom pada S1 harus bernilai positif
sehingga K > 0 sehingga, K < 274,31 ; K > 0,8767 D. Mencari nilai periode waktu kritis (Pcr).
Dari persamaan 46,73 S2 + 100,3 + 114,4 K dengan
K = 274,31 maka, 46,73 S2 + 100,3 + 31381,064
Dengan menggunakan persamaan akar didapat nilai s = 25,95 dengan demikian pada nilai Kcr = 274,31 berosilasi pada 25,95 rad/s sehingga Pcr = 0,242 sec.
E. Mencari nilai Kp, Ki, Kd
Berdasarkan tabel Ziegler-Nichols metode kedua maka didapat nilai Kp = 0,6 . Kcr = 164,586 ; Ki = 2.Kp / Pcr = 1360,21 ; Kd = Kp / 8.Pcr = 85,01 2006 . 0 04656 . 0 2 0003322 . 0 44 . 0 + + s s
.
x -
.
y
=
0
793
1
066
*s)
/(
) -
*s
/(
1000
533
500
793
2s
*s)
/(
) -
*s
/(
1
500
533
1000
793
2500
1000
260
+
s
100.3
+
s
223.8
+
s
46.73
+
s
0.3322
4
.
114
2 392 F. Hasil Pengujian 1 : Pengaturan Menggunakan Rheostat
Tabel III. Hasil Pengujian 1 Tanpa beban Teg. (V) Arus (A) Kecepatan (Rpm) P (W) 100 1.2 650 120 100 1.25 700 125 100 1.25 750 125 100 1.3 800 130 100 1.3 850 130 105 1.3 900 136.5 105 1.3 950 136.5 105 1.35 1000 141.75
Tabel IV. Hasil Pengujian1 dengan beban 0,5 N.m Teg. (V) Arus (A) Kecepatan (Rpm) P (W) 105 1.95 650 204.75 105 2 700 210 105 2 750 210 105 2.05 800 215.25 105 2.05 850 215.25 105 2.05 900 215.25 105 2.05 950 215.25 105 2.05 1000 215.25 Tabel V. Hasil Pengujian dengan beban 1 N.m
Teg.
(V) Arus (A) Kecepatan (Rpm) (W) P 75 2.55 650 191.25 80 2.55 700 204 85 2.6 750 221 90 2.6 800 234 95 2.6 850 247 100 2.6 900 260 105 2.7 950 283.5 110 2.7 1000 297
G. Hasil Pengujian 2 : Pengaturan Menggunakan Rectifier Terkendali
Tabel VI. Hasil Pengujian 2 Tanpa beban Teg. (V) Arus (A) Kecepatan (Rpm) P (W) 70 1.2 650 84 76 1.25 700 95 80 1.25 750 100 85 1.3 800 110.5 87 1.3 850 113.1 90 1.3 900 117 93 1.3 950 120.9 100 1.35 1000 135
Tabel VII. Hasil Pengujian 2 dengan beban 0,5 N.m Teg. (V) Arus (A) Kecepatan (Rpm) P (W) 70 1.95 650 136.5 75 2 700 150 80 2 750 160 85 2.05 800 174.25 90 2.05 850 184.5 95 2.05 900 194.75 100 2.05 950 205 105 2.05 1000 215.25 Tabel VIII. Hasil Pengujian 2 dengan beban 1 N.m
Teg. (V) Arus (A) Kecepatan (Rpm) P (W) 110 2.55 650 280.5 110 2.55 700 280.5 110 2.6 750 286 110 2.6 800 286 110 2.6 850 286 110 2.6 900 286 110 2.7 950 297 110 2.7 1000 297
H. Hasil Pengujian 3 : Respon Kecepatan Motor DC
Gambar 9. Respon Motor Tanpa Beban
93 Gambar 11. Respon motor dengan pembebanan 1 N.m
I. Analisa
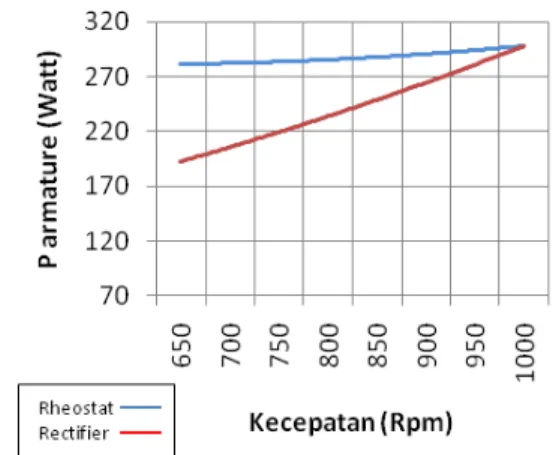
Gambar 12. Grafik Parmature Motor DC keadaan Tanpa beban
Dari hasil pengujian tanpa beban semakin bertambahnya kecepatan semakin sedikit selisih antara rheostat dengan rectifier. Perbedaan paling besar yaitu pada kecepatan 650 rpm sebesar 42%.
Gambar 13. Grafik Parmature Motor DC dengan Pembebanan 0,5 N.m
Dari hasil pengujian berbeban 0,5 N.m sama seperti tanpa beban, semakin pengoperasian motor semakin cepat semakin sedikit selisih antara rheostat dengan rectifier. Perbedaan
paling besar meningkat yaitu pada kecepatan 650 Rpm sebesar 50%
Gambar 13. Grafik Parmature Motor DC dengan Pembebanan 1 N.m
Dari hasil pengujian berbeban 1 N.m sama seperti tanpa beban, semakin pengoperasian motor semakin cepat semakin sedikit t antara rheostat dengan rectifier. Perbedaan paling besar yaitu pada kecepatan 650 Rpm sebesar 47%
Penggunaan rheostat kurang tepat penggunaanya dalam pengaturan kecepatan karena rheostat itu sendiri menyerap daya, sedangkan rectifier hampir tidak menyerap daya sama sekali. Jika dibandingkan antara rheostat dengan rectifier terkendali maka selisih daya input bisa mencapai 50%. Pada pengujian respon sistem, dengan adanya beban respon motor pun ikut berubah terlihat perbedaan tipis antara ketiganya yaitu pada tanpa beban settling time dicapai pada 4 detik beban 0,5 N.m settling time dicapai pada 5 detik dan terakhir beban 1 N.m settling time dicapai pada 6 detik.
Sehingga dapat disimpulkan bahwa pembebanan
mempegaruhi respon sistem. Semakin kecilnya beban semakin cepat respon yang dapat dibuat.
V. KESIMPULAN
1. Parameter PID yang didapatkan melalui metode Ziegler-Nichols adalah Kp = 164,586; Ki = 1360,21; Kd = 85,01. 2. Bila ditinjau dari daya input dan effisiensi pengaturan kecepatan dengan mengatur tegangan masukan (V) menggunakan rectifier atau PID penggunaanya lebih tepat daripada pengaturan tahanan dalam (Ra) menggunakan rheostat bila motor dioperasikan dibawah nominal.
3. Bila motor dioperasikan mendekati nominal, maka dengan pengaturan menggunakan rheostat, rectifier maupun PID hasilnya relatif sama. dan respon strating motor dipengaruhi oleh pembebanan, semakin besar pembebanan, respon startingnya relatif sama dengan bila motor dioperasikan tanpa PID kontroler dalam hal ini menggunakan rhesostat maupun rectifier, tetapi bila motor dioperasikan dengan beban kecil dengan PID kontroler dapat mempercepat respon starting sebesar 0,4 detik
94 REFERENSI
[1] C.M. Ong, Dynamic Simulation of electric machinery. School of Electrical &Computer Engineering, Purdue University, West Lafayette, Indiana, 1998.
[2] Ctms.engin.umich.edu/CTMS/index.zphp? example = Motor Speed & section = System Modeling diakses pada tanggal 21 April 2013. [3] D. Istanto, Bahan ajar Elektronika Daya. Universitas Negeri
Yogyakarta. Yogyakarta, 2010.
[4] F. Mohamed, PID controler design for controling DC motor Speed Using Matlab Aplication. Faculty of Electrical & Electronics Engineering, University Malaysia Pahang, 2008.
[5] I. Dogan, Microcontroller based applied digital control, Department of Computer Engineering Near East University, Cyprus, 2006.
[6] L.Desborough, R. Miller, Increasing Customer Value of Industrial Control Performance Monitoring—Honeywell’s Experience, Honeywell Hi-Spec Solutions Thousand Oaks, CA 91320, 2001.