Desain Roadside UnitUntuk Pendeteksi Kepadatan Lalu Lintas
Pada Sistem Komunikasi Infrastructure To Vehicle( I2V)
Ari Wijayanti*, Okkie Puspitorini, Nur Adi Siswandari, Haniah Mahmudah,Yuri Pamungkas
Abstrak:Jumlah kendaraaan bermotor di Indonesia setiap tahunnya mengalami peningkatan namun jumlah infrastruktur jalan yang tetap mengakibatkan kemacetan yang semakin parah. Untuk itu dibutuhkan sistem cerdas yang mampu untuk memonitor jalan raya.Pada penelitian ini dibangun sistem Infrastructure to vehicle (I2V) berupa sistem pendeteksi kepadatan lalu lintas.Sistem ini terdiri dari dua bagian yaitu sisi client dan sisi server. Pada sisi clientdidesain
roadside unit (RSU) yang diletakkan ditepi jalan untuk memonitor kondisi jalan raya. Sedangkan server bertugas untuk
menyimpan dan mengolah data yang dikirimkan dari sisi client.Roadside unit terdiri dari sensor dan sistem transmisi untuk mengikirimkan data ke sisi server. Pada penelitian ini digunakan sensor RFIDReader dan tag sebagai identitas pada kendaraan serta mikrokontroller Raspberry phi yang bertugas mengolah data dari sensor hingga dapat dikirim kesisi server. Berdasarkan hasil pengujian menunjukkan roadside unit(RSU) mendeteksi posisi kendaraan hingga 10 meter dengan variasi sudut penbacaan hingga 270 derajat ketinggian hingga 2 meter dan variasi kecepatan hingga 65 km/jam.Hasil perhitungan kepadatan jalan raya dihitung berdasarjkan derajat kejenuhan akibat lebar jalan dan banyaknya kendaraan yang terdeteksi oleh Roadside unit. Data kepadatan lalu lintas akan ditampilkan pada website yang menunjukkan kondisi kepadatan jalan tersebut.
Kata Kunci:Infrastructure to vehicle (I2V), Roadside unit (RSU), RFID, Raspberry Phi, sensor, kepadatan
1. Pendahuluan
Jumlah pertumbuhan penduduk yang semakin tinggi membawa dampak pada berbagai aspek kehidupan tak terkecuali penggunaan alat transportasi di jalan raya.Pertumbuhan jumlah pengguna kendaraan dijalan raya yang sangat tinggi mengakibatkan berbagai problem
diantaranya kemacetan lalu
lintas.IntelligenttransportationSystem (ITS) merupakan sistem cerdas yang menyediakan layanan inovatif untuk mendukung pemecahan berbagai masalah yang timbul dijalan raya baik untuk manajemen lalu lintas maupun manajemen alat transportasi.Penerapan ITS harus didukung dengan sistem komuniakasi yang handal pula. Daam ITS dikenal dengan beberapa sistem komunikasi yaitu
infrastructure to infrastructure (I2I), infrastructure
tovehicle (I2V), vehicle ke infrastruktur (V2I) dan vehicleto
vehicle (V2V) [1]. Pada sistem komunikasi I2V yang
dimaksud dengan infrastructure atau juga biasa disebut dengan roadside unit (RSU) adalah sebuah sarana yang digunakan untuk mendeteksi, memonitor dan mengolah data pada sistem komunikasi dan bersifat tetap (fixed), sedangkan
vehicle (kendaraan) bersifat bergerak (mobile).
Beberapa penelitian telah membahas sistim komunikasi ITS [2][3][4] penelitian penerapan ITS. Insfrastruktur pada ITS memiliki peranan penting dalam pengembangan
ITS.Insfrastruktur yang digunakan disini berupa Roadside
unityang terdiri dari sensor utama untuk mendeteksi
kendaraan dijalan raya.Beberapa sensor telah dicoba untuk dikembangkan dalam pembuatan roadside unit ini. Okkie dkk[4] telah mendesain sistem menggunakan sensor kecepatan untuk mendeteksi kecepatan kendaraan di jalan raya. Hari Maghfiroh [5] melakukan menguji kehandalan RFID sebagai Pendeteksi Identitas Kendaraan untuk Mengatasi Pelanggaran Traffic Light memberikan hasil bahwa RFID dapat digunakan untuk mendeteksi kendaraan dengan kecepatan hingga 60 Km/jam dan jangkauan pembacaan Reader hingga 40 derajat.Ahmed S. Salama [6] membangun sistem cerdas terpadu untuk pengelolaan dan pengendalian lampu lalu lintas menggunakan active RFID. Haniah dkk [7] melakukan penelitian tentang kinerja RFID dalam rancang bangun sistem monitoring plat nomor kendaraan bermotor.Pada penelitian ini dibangun sistem komunikasi I2V untukmonitoring jumlah kepadatan lalu lintas menggunakan menggunakan RFID sebagai sensor sebagai roadside unit yang dilengkapi dengan mikrokontroller yang membantu proses pengiriman data ke sisi serverwireless untuk disimpan dilakukan perhitungan kepadatan kendaraan dan ditampilkan dalam WEB.
Paper ini terdiri dari pendahuluan pada bagian 1 yang berisi latar belakang penelitian, Desain sistem I2V berupa pembuatan roadside unit dan database disisi server pada bagian 2, pengujian dan analisa roadside unit pada bagian 3 dan diakhiri dengan kesimpulan.
*Korespondensi:
[email protected] ; [email protected]
Prodi Teknik Telekomunikasi ,Departemen ElektroPoliteknik Elektronika Negeri Surabaya (PENS), Kampus PENS, Jl. Raya ITS, SukoliloSurabaya, Indonesia
2. Desain Sistem komunikasi I2V 2.1. Desain Sistem
Sistem yang akan dibuat ini terdiri dari dua bagian yaitu perancangan pada sisi client dan perancangan pada sisi server seperti ditunjukkan pada Gambar 1
Gambar 1. Perancangan Sistem I2V
desain di sisi client mencakup integrasi perangkat Roadside
unit yang terdiri dari sensor RFID Reader dan RFID tag
yang diletakkan dikendaraan, Kamera webcam, Raspberry Pi b + dan router untuk koneksi internet saat pengiriman data ke client. Pada sisi server terdiri dari data base dan koneksi internet dan ditampilkan pada Website seperti ditunjukkan pada Gambar 1. Gambar 2 (a) dan (b) menunjukkan flowchart pengerjaan sistem.
(a)
(b)
Gambar 2(a) Flowchart pada sisi client (b) Flowchart pada sisi server
2.2. Kepadatan lalu lintas
Kepadatan lalu lintas dikategorikan berdasarkan derajat kejenuhan seperti ditunjukkan pada Tabel 1.Derajat kejenuhan dihitung berdasarkan arus kendaraan dibagi dengan kapasitas jalan Arus kendaraan dihitung berdasarkan jumlah kendaraan yang lewat dalam satu jam.
Tabel 1 Tingkat Kepadatan Lalu Lintas berdasarkan Derajat Kejenuhan [9]
Derajat Kejenuhan Keterangan
≤ 0.6 Lancar
0.61 - 0.7 Ramai Lancar 0.71 - 0.9 Padat Merayap 0.91 - 1.0 Padat Tersendat
1.0 > Macet
Tabel 2. Kapasitas Dasar Jalan
3. Pengujian Sistem 3.1. Pengujian Roadside unit
Pengujian terdiri dari pembacaan RFID Reader terhadap tag yang terpasang pada kendaraan saat melaju dengan kecepatan yang bervariasi, ketinggian optimal pembacaan RFID Reader, jangkauan pembacaan RFID Reader yang disesuaikan dengan lebar jalan, polasasi sudut baca RFID
Reader, dan counting jumlah kendaraan yang terdeteksi
sensor serta pengiriman data kendaraan ke server
3.1.1. Uji polarisasi sudut baca RFID Reader Pengujian ini dilakukan untuk mengetahui sudut baca dari RFID Reader. Dimana RFID Tag diletakkan pada sudut 0º, 90º, 180º dan 270º terhadap RFID Reader dengan skema pengujian polarisasi sudut baca RFID Reader ditunjukkan pada Gambar 3 dan Tabel 3 menunjukkan hasil pengujian.
Tipe
Jalan Tipe
Kapasitas dasar (smp/jam)
Catatan Jalan Perkota an Jalan Luar Kota Jalan Bebas Hambat an Empat lajur terbagi Datar 1.650 1.900 2.300 Per lajur Bukit 1.850 2.250 Gunung 1.800 2.150 Empat lajur tak terbagi Datar 1.500 1.700 Per lajur Bukit 1.650 Gunung 1.600 Dua lajur tak terbagi Datar 2.900 3.100 3.400 Total dua arah Bukit 3.000 3.300 Gunung 2.900 3.200
Gambar 3.Skema pengujian polarisasi sudut baca RFID Reader Berikut adalah hasil pengujian polarisasi sudut baca RFID
Reader yang ditunjukkan pada Tabel 3.
Tabel 3.Hasil pengujian polarisasi sudut baca RFID Reader
No Jarak Pengujian Sudut Hasil Pengujian Terdeteksi Tidak Terdeteksi 1 5 meter 0⁰ - 90⁰ - 180⁰ - 270⁰ - 2 6 meter 0⁰ - 90⁰ - 180⁰ - 270⁰ - 3 7 meter 0⁰ - 90⁰ - 180⁰ - 270⁰ - 4 8 meter 0⁰ - 90⁰ - 180⁰ - 270⁰ - 5 9 meter 0⁰ - 90⁰ - 180⁰ - 270⁰ - 6 10 meter 0⁰ - 90⁰ - 180⁰ - 270⁰ -
Berdasarkan hasil tabel 3 untuk pengujian polarisasi sudut baca RFID Reader dapat dikatakan bahwa RFID Reader dapat membaca RFID tagpada sudut yang berbeda-beda yaitu 0 º, 90º, 180 º dan 270 atau dengan kata lain RFID
Reader dapat membaca RFID tag dari sudut manapun
dengan jarak baca tertentu. Pada pengujian diambil sampel dengan jarak yaitu 5-10 meter.Pada jarak baca tersebut pembacaan RFID Readermasih optimal. Dengan kata lain, pembacaan RFID Readerterhadap tag tidak ditentukan
dengan sudut melainkan pada jarak antaraRFID tag dengan RFID Reader.
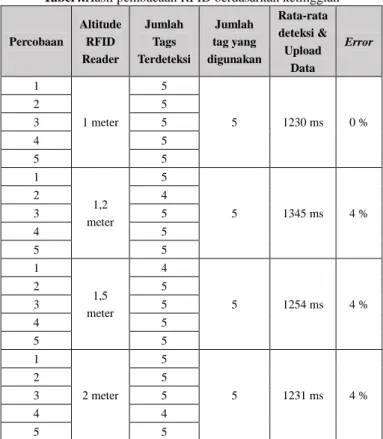
3.1.2. Uji Pembacaan berdasarkan ketinggiansensor Pada pengujian ini dengan meletakkan RFID Reader pada posisi tertentu, yaitu mulai dengan ketinggian dari 100, 120, 150 dan 200 cm. Untuk mengetahui sensitivitas baca pada
RFID Reader dengan kondisi objek kendaraan melaju
dengan kecepatan 20 km/h. RFID Tagdiletakkan pada kendaraan agar nantinya dapat terdeteksi oleh RFID Reader.
Tabel4.Hasil pembacaan RFID berdasarkan ketinggian
Percobaan Altitude RFID Reader Jumlah Tags Terdeteksi Jumlah tag yang digunakan Rata-rata deteksi & Upload Data Error 1 1 meter 5 5 1230 ms 0 % 2 5 3 5 4 5 5 5 1 1,2 meter 5 5 1345 ms 4 % 2 4 3 5 4 5 5 5 1 1,5 meter 4 5 1254 ms 4 % 2 5 3 5 4 5 5 5 1 2 meter 5 5 1231 ms 4 % 2 5 3 5 4 4 5 5
3.1.2. Uji pengaruh kecepatan terhadap pembacaan RFID Reader
Pada pengujian ini id tag yang terpasang pada kendaraan akan dilakukan pembacaan oleh RFID Reader terhadap kecepatan kendaraan. Pengujian ini sangat penting mengingat setiap kendaraan yang melaju di jalan raya memiliki kecepatan yang berbeda-beda. Hasil yang didapat pada pengujian ini akan sangat berpengaruh terhadap keberhasilan sistem yang telah dibuat.
Berdasarkan hasil pengujian pengaruh kecepatan terhadap pembacaan RFID Readerdiyunjukkan pada Tabel 5. Tabel 5 menunjukkan bahwa RFID reader dapat melakukan deteksi terhadap tag pada kecepatan 10 km/jam hingga kecepatan 65 km/jam. Pada percobaan ini kecepatan dibatasi hingga kecepatan 65 km/jam karena pertimbangan faktor keamanan pengendara saat pengujian.Berdasarkan hasil pengujian menunjukkan bahwa tipe sensir RFID ini dapat digunakan sebagai Roadsideunit pada jalan raya.
RFID Reader
3.2. Pengujian kepadatan kendaraan
Pengujian ini bertujuan untuk mengetahui keakuratan deteksi RFID Reader pada kendaraan baik posisi kendaraan seri dan paralel dengan menempatkan RFID Reader pada ketinggian dan jarak tertentu bersamaan dengan data kendaraan yang diunggah ke server seperti ditunjukkan pada Gambar 4.
Gambar4.Skema pengujian pembacaan RFID Readerpada kendaraan secara seri dan parallel
Hasil pengujian untuk kecepatan kendaraan dan kepadatan lalu lintas pada kecepatan 20 km/jam, 30 km/jam dan 40 km/jam ditunjukkan pada Tabel 5- tabel 10
Tabel6 Pengujian kondisi kendaraan seri ¶rel pada kecepatan 20km/h Waktu (menit) kecepatan Tag Terdeteksi Pengguna tag Rata-rata waktu deteksi hinga upload Error 1 20 km/h 15 16 1372,7 ms 6,25 % 3 20 km/h 30 32 1372,1 ms 6,25 % 5 20 km/h 92 96 1384,5 ms 4,16 % 10 20 km/h 152 160 1380,2 ms 5 %
Tabel 11.Kepadatan lalu lintas berdasarkan DK pada
kecepatan 20 Km/jam Waktu (menit) Jumlah kendaraan (smp/menit) Derajat kejenuhan Kepadatan jalan 1 15 0,54 Lancar 3 10 0,36 Lancar 5 19 0,68 Ramai lancar 10 16 0,57 Lancar
Tabel7.Pengujian kondisi kendaraan seri ¶rel pada kecepatanof 30km/h Waktu (menit) kecepatan Tag Terdete ksi Pengguna tag Rata-rata waktu deteksi hinga upload Error 1 30 km/h 31 32 1372,9 ms 3,12 % 3 30 km/h 62 64 1384,2 ms 6,25 % 5 30 km/h 123 128 1384,7 ms 3,90 % 10 30 km/h 236 240 1381,3 ms 1,66 %
Tabel8.Kepadatan lalu lintas berdasarkan DK pada kecepatan 30 Km/jam Waktu (menit) Jumlah kendaraan (smp/menit) Derajat kejenuhan Kepadatan jalan 1 31 1,11 Macet 3 21 0,75 Padat merayap 5 25 0,89 Padat merayap 10 24 0,86 Padat merayap
Tabel9.Pengujian kondisi kendaraan seri ¶rel pada kecepatan40km/h Waktu (menit) kecepatan Tag Terdeteksi Pengguna tag Rata-rata waktu deteksi hinga upload Error 1 40 km/h 44 48 1372,1 ms 8,33 % 3 40 km/h 108 112 1378,7 ms 3,57 % 5 40 km/h 185 192 1379,3 ms 3,64 % 10 40 km/h 267 272 1381,3 ms 1,83 %
Tabel 10.Kepadatan lalu lintas berdasarkan DK pada kecepatan 40 Km/jam Waktu (menit) Jumlah kendaraan (smp / minute) Derajat kejenuhan Kepadatan jalan 1 44 1,57 macet 3 36 1,29 macet 5 37 1,32 macet 10 27 0,96 Padat Tersendat No Kecepatan Hasil Pengujian
Terdeteksi Tidak Terdeteksi
1 10 km/jam - 2 20 km/jam - 3 30 km/jam - 4 40 km/jam - 5 50 km/jam - 6 60 km/jam - 7 65 km/jam -
Pada pengujian kendaraan secara seri & paralel yang disertai upload data kendaraan, diperoleh hasil bahwa kendaraan yang melaju dengan kecepatan 20 – 40 km/jam selama kurun waktu 1 – 10 menit dapat terdeteksi oleh RFID Reader dengan rata – rata delay deteksi kurang dari 1400 ms dengan error pembacaan maksimum hingga 8,33 %. Selain itu, diperoleh data berupa arus kendaraan tiap menitnya pada jalan tersebut.Arus kendaraan digunakan untuk mencari nilai derajat kejenuhan jalan (arus kendaraan ÷ kapasitas maksimum jalan). Jika kapasitas maksimum jalan adalah 1650 kend / jam atau 28 kend / menit maka akan diperoleh nilai derajat kejenuhan jalannya. Kondisi jalan dikatakan lancar jika derajat kejenuhan (DK) ≤ 0,6 ; ramai lancar jika DK berkisar 0,61 – 0,7 ; padat merayap jika DK berkisar 0,71 – 0,9 ; padat tersendat jika DK berkisar 0,91 – 1 ; dan macet jika DK > 1.
3.3. Sistem Informasi
Data kepadatan lalu lintas yang telah diolah di database, kemudian ditampilkan di Web dengan informasi berupa kondisi jalan dalam keadaan Lancar, Padat merayap dan Macet seperti ditunjukkan pada Gambar 6 terlihat tampilan menu utama dimana terdapat beberapa menu seperti Traffic Jam, Traffic Monitoring, Vehicle Entry,
Registered Vehicle, Traffic Prediction, Upload Data, User Management, dan Logout Menu untuk menampilkan data
kondisi lalu lintas jalan. Pada menu Traffic Jam terdapat peta lokasi jalan dimana sensor terpasang, waktu/tanggal, arus kendaraan, dan tingkat kepadatan lalu lintas jalan berdasarkan data kendaraan yang telah masuk. Tampilan
Traffic Jam Menu website pada Gambar 7 yang
menggambarkan data 81 kendaraan / menit, sehingga kondisi trafik dalam keadaan “Macet”.
Gambar 6. Tampilan Monitoring lalu lintas
Gambar 7.TampilanTraffic Jam MenuWebsite
4. Kesimpulan dan Saran
Berdasarkan hasil pengujian dan analisa dari data dapat diambil kesimpulan Sebaai berikut:
1. Roadside unit menggunakan RFID sensor mampu mendeteksi kendaraan hingga jarak 10 meter dengan variasi sudut 0 0, 900, 1800 dan 2700 2. Posisi ketinggian Roadside unithingga 2 m masih
dapat mengidentifikasi kendaraan
3. Sensor RFID Reader mampu mendeteksi tag yang terpasang pada kendaraan yang melintas hingga kecepatan 65 km/jam dengan delay deteksi dan pengiriman data ke server antar tag yang terbaca kurang dari 1500 ms.
4. Lebar jalan menentukan derajat kejenuhan 5. Monitoring kendaraan pada website ditentukan oleh
kemampuan upload data dari server
Saran
Untuk keberlanjutan penelitian ini maka pemilihan jenis dan spesifikasi RFID reader maupun RFID tag menjadi hal yang signifikan pada saat pembuatan roadside unit. Untuk komunikasi wireless dibutuhkan jaringan yang baik serta kondid lingkungan yang mendukung sehingga delay yang terjadi tidak terlalu besar.
Daftar Pustaka
[1] G. Karagiannis, 2011, “Vehicular Networking: A Survey and Tutorial on Requirements, Architectures, Challenges, Standards and Solutions”, IEEE Communications Surveys & Tutorials, Accepted For Publication,1553-877X/11/$25.00
[2] Yasifa, Nur, Okkie, September 2015, “An analysis of simulation – based vehicle to vehicle (V2V) communication system in main street of Surabaya”, International Electronic Symposium, IEEE, Surabaya, ISBN 978-1-4673-9344-7, page 183-188.
[3] Nur Adi S, Ari W, Okkie P, Haniah M, 2014, “ Analysis of Urban Area Environmental Conditions in Surabaya to Support The Communication System for Intelligent
Transportation System. Case Study: Vehicle to Infrastructure (V2I) Communication”, The Third Indonesian-Japanese Conference on Knowledge Creation and Intelligent Computing (KCIC), ISBN : 978-602-944-97-6, page 58-65.
[4] Okkie P, Ari W, Nur Adi S, Haniah M,”Measurement of Interconnecting Network for Roadside Unit Placement on Cellular Network to Support Intelligent Transportation SystemAsian Journal of Applied Sciences (ISSN: 2321 – 0893) Volume 05 – Issue 02, April 2017
[5] Hari Maghfiroh, Luthfi Rizal dan Risanuri Hidayat. 2012. “Pengujian RFID sebagai Pendeteksi Identitas
Kendaraan untuk Mengatasi Pelanggaran Traffic Light”,JTETI, UGM – IEEE Comp. Soc. Ind. Chapter:
143.
[6] Ahmed S. Salama, “Intelligent Cross Road Traffic
Management System (ICRTMS)”, 2010 2nd International Conference on Computer Technology and Development (ICCTD 2010).
[7] Haniah, Ari Wijayanti dkk, “Rancang Bangun Sistem Monitoring plat Nomor Kendaraan”, Sentrinov semarang 2015
[8] Peraturan Menteri Perhubungan No : KM 14 Tahun 2006 Tentang Manajemen dan Rekayasa Lalu Lintas di Jalan
![Tabel 1 Tingkat Kepadatan Lalu Lintas berdasarkan Derajat Kejenuhan [9]](https://thumb-ap.123doks.com/thumbv2/123dok/4580567.3336536/2.892.72.835.217.1134/tabel-tingkat-kepadatan-lalu-lintas-berdasarkan-derajat-kejenuhan.webp)