PROTOTIPE SISTEM KONTROL LAMPU LALU LINTAS OTOMATIS
MENGGUNAKAN LDR SEBAGAI SENSOR KEPADATAN
KENDARAAN BERBASIS MIKROKONTROLLER
ATMEGA16
NASKAH PUBLIKASI
diajukan oleh
Rahmad Hidayat
12.21.0671
Kepada
SEKOLAH TINGGI MANAJEMEN INFORMASI DAN KOMPUTER
AMIKOM YOGYAKARTA
YOGYAKARTA
2014
3
PROTOTYPE AUTOMATIC TRAFFIC LIGHT CONTROL SYSTEM USING LDR AS a SENSOR OF VEHICLE DENSITY BASE ON MICROCONTROLLER ATMEGA16
PROTOTIPE SISTEM KONTROL LAMPU LALU LINTAS OTOMATIS MENGGUNAKAN LDR SEBAGAI SENSOR KEPADATAN KENDARAAN BERBASIS
MIKROKONTROLLER ATMEGA16
Rahmad Hidayat Melwin Syafrizal Jurusan Teknik Informatika STMIK AMIKOM YOGYAKARTA
ABSTRACT
ATCS (Automatic Traffic Light Control System) has been used in major cities to prevent congestion. But the increasing number of vehicles cause less than optimal functioning ATCS. Stacking of vehicles at traffic light intersection rife much lost time resulted street rider, wasted fuel and air pollution.
Traffic light system which can detect the density of vehicles is one of the solutions to reduce vehicle congestion at a traffic light intersection, the system will prioritize the flow of solid vehicle with a longer path, so it can parse the density of vehicles.
The system is governed by the ATMEGA16 microcontroller sensor LDR (Light Dependent Resistor) as a detector of vehicle density. LDR will it signals to the microcontroller output is then processed into a green flame becomes longer time to parse the density of vehicles.
4
1. PendahuluanKemacetan merupakan permasalahan utama yang sering kita jumpai. Penumpukan kendaraan di persimpangan lampu lalu lintas (traffic light) sering terjadi di jalan jalan utama. Sedangkan lampu lalu lintas itu sendiri adalah sebuah system yang dibuat untuk mengatur lewatnya arus kendaraan di sebuah persimpangan supaya tidak terjadi kemacetan dan memberikan dampak positif terhadap keamanan serta keselamatan pengendara baik roda dua ataupun roda empat.
Penumpukan kendaraan di persimpangan lampu lalu lintas dari satu arah yang cukup lama, sementara arah yang lain kosong, dapat menimbulkan pemborosan bahan bakar kendaraan. Bahan bakar kendaraan yang saat ini banyak digunakan berasal dari fosil yang cadangannya terbatas. Pencemaran udara melalui asap knalpot memberi dampak pencemaran udara dan sangat tidak ramah lingkungan. Lampu merah (berhenti) yang lama menyebabkan kemacetan panjang yang merugikan banyak orang dan lingkungan.
Sistem lampu lalu lintas hanya membagi waktu antara kendaraan yang berhak jalan dan kendaraan yang wajib berhenti secara berulang ulang dengan waktu berhenti (merah) dan waktu jalan (hijau) yang sudah ditentukan. Lampu lalu lintas tidak dapat mendeteksi jumlah arus kendaraan dari arah mana yang ramai dan sepi. Sehingga kemacetan panjang di salah satu titik lampu lalu lintas diakibatkan oleh ramainya kendaraan yang akan melewati persimpangan lampu lalu lintas.
2. Landasan Teori
2.1 Mikrokontroller ATmega16
2.1.1 Pengertian Mikrokontroller ATmega16
Atmel AVR adalah jenis mikrokontroler yang paling sering dipakai dalam bidang elektronika dan instrumentasi. Mikrokontroler AVR ini memiliki arsitektur Reduce Instruction Set Computing (RISC) delapan bit, di mana semua instruksi dikemas dalam kode 16-bit dan sebagian besar instruksi dieksekusi dalam 1 siklus clock. Nama AVR sendiri berasal dari Alf (Egil Bogen) and Vegard (Wollan)'s Risc processor, dimana Alf Egil Bogen dan Vegard Wollanadalah dua penemu berkebangsaan Norwegia yang menemukan mikrokontroller AVR yang kemudian diproduksi oleh Atmel.
5
2.1.2 Skema Mikrokontroller ATmega16Gambar 2.1 Skema Mikrokontroller ATmega16
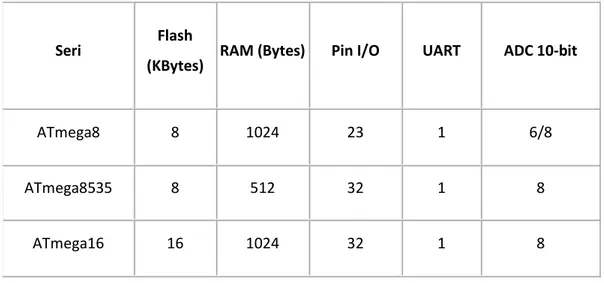
2.1.3 Spesifikasi Mikrokontroller ATmega16
Tabel 2.1 Spesifikasi Mikrokontroller ATmega16
Seri
Flash
(KBytes)
RAM (Bytes)
Pin I/O
UART
ADC 10-bit
ATmega8
8
1024
23
1
6/8
ATmega8535
8
512
32
1
8
ATmega16
16
1024
32
1
8
2.2 Light Dependent Resistor ( LDR )
Sensor suhu LM35 adalah komponen elektronika yang memiliki fungsi untuk mengubah besaran suhu menjadi besaran listrik dalam bentuk tegangan. LM35 memiliki keakuratan tinggi dan kemudahan perancangan jika dibandingkan dengan sensor suhu yang lain, LM35 juga mempunyai keluaran impedansi yang rendah dan linieritas yang
6
tinggi sehingga dapat dengan mudah dihubungkan dengan rangkaian kendali khusus serta tidak memerlukan penyetelan lanjutan.(Sumisjokartono : 1985)
Gambar 2.2 LDR
3. Analisis Dan Perancangan Sistem 3.1 Analisis Kebutuhan Alat dan Bahan 3.1.1 Analisis Kebutuhan Hardware
Perancangan prototipe sistem kontrol lampu lalu lintas otomatis ini terbagi atas dua bagian, yaitu perancangan hardware dan perancangan software. Perancangan hardware menggunakan mikrokontroller ATMEGA16 yang sudah ada dan berbagai pelengkap hardware lainnya. Sedangkan perancangan software terdiri dari perancangan program mikrokontroller.
Tabel 3.1 Kebutuhan Hardware
No. Komponen Jumlah Harga (Rp) Total (Rp)
1 Mikrokontroller ATMEGA16 2 80.000 160.000 2 LCD 16x2 1 50.000 50.000 3 LED 20 100 2000 4 LDR 8 2000 16.000 5 Relay 4 3.000 12.000 6 Seven Segmen 8 6000 48.000 8 Adaptor 5V 1 35.000 35.000 9 Resistor 500 ohm 10 100 1000 10 PCB @meter 1 35.000 35.000 11 Rangka alumunium 1 25.000 25.000
7
(40x40cm) 12 Papan acrylic (40x40cm) 2 43.000 86.000 Total 470.0003.1.2 Analisis Kebutuhan Software
Tabel 3.2 Kebutuhan Software
No Software Fungsi
1 Cadsoft Eagle Layout Editor
Digunakan untuk menggambar diagram rangkaian elektronika (wired diagram) 2 Bascom AVR Digunakan untuk menuliskan program
arduino uno dengan bahasa pemograman basic
3 Khazama Digunakan untuk mengunduh program dari BASCOM AVR ke Mikrokontroller
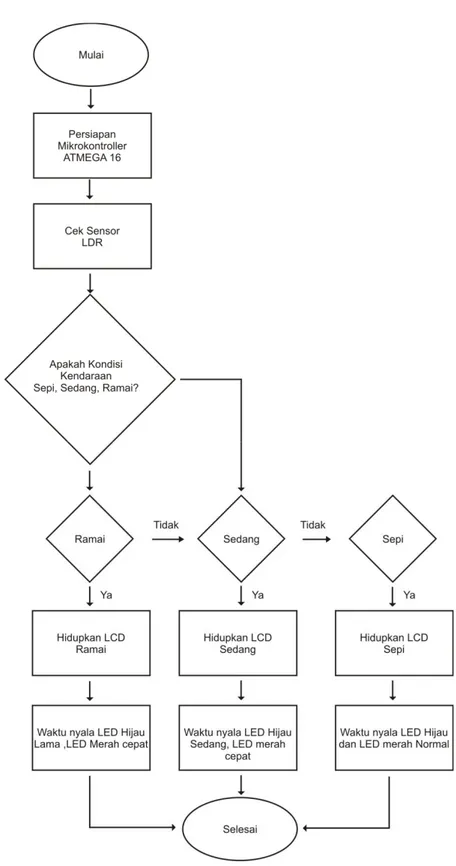
3.2 Perancangan Sistem
8
9
Keterangan Flowchart :
Awal alat dinyalakan maka berlanjut ke proses inisiasi program, setelah itu lampu lalu lintas akan berjalan norma seperti biasa dengan kondisi kepadatan kendaraan sepi. Selanjutnya apabila ada penambahan jumlah kepadatan kendaraan yang terdeteksi oleh sensor LDR maka sensor akan memberikan informasi kepada mikrokontroller dan mikrokontroller akan mengatur waktu nyala lampu hijau untuk lebih lama supaya mengurai kemacetan.
3.2 Rangkaian Perangkat Keras
Secara umum bagian perangkat keras yaitu elektronik.
3.2.1 Elektronik
Dalam rangkaian elektronik terdapat mainboard, mainboard terdapat dalam rangkaian mikrokontroller ATMEGA16. Di dalam mikrokontroller ATMEGA16 terdapat komponen-komponen elektronik lainnya yang mendukung rangkaian untuk dijadikan fungsi sebagai otak atau pengendali utama pada alat. Terdapat beberapa PIN mikrokontroller yang dijadikan input output. Rangkaian prototipe lampu lalu lintas otomatis ini dibagi menjadi beberapa blok, yaitu blok masukan (input), blok proses, dan blok keluaran (output).
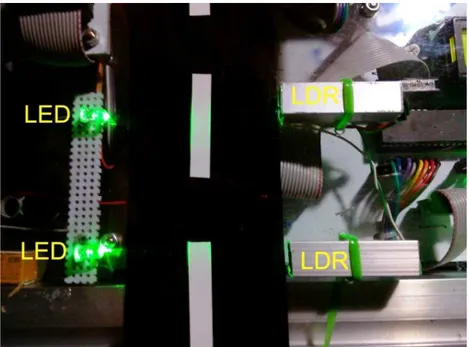
3.2.1.1 Blok Masukan (input)
Blok masukkan dari rangkaian ini adalah sensor LDR yang berfungsi mendeteksi kepadatan kendaraan. Terdapat 2 sensor LDR yang terpasang tiap sisi jalan pada prototipe.
10
Gambar 3.1 Blok Masukan Sensor LDR
LDR digunakan sebagai pendeteksi sensor kepadatan kendaraan. LDR berfungsi sebagai saklar atau switch apabila tidak ada benda yang menutupi antara LED dengan LDR dalam hal ini benda diartikan sebagai kendaraan maka relay LDR akan bernilai 0 (nol). Sehingga informasi yang diberikan kepada mikrokontroller yaitu kondisi jalan normal. Apabila satu LDR ada yang tertutup benda maka relay akan bernilai 1 dan memberikan informasi kepada mikrokontroller kondisi kendaraan sedang. Jika kedua LDR tertutup informasi yang didapat keadaan ramai.
3.2.1.2 Blok Proses
Blok proses terdapar pada mikrokontroller ATMEGA16. Didalam mikrokontroller ATMEGA16 terdapat 28 PIN yang masing masing mempunyai fungsi. Terdapat beberapa PIN yang berfungsi sebagai input-output. PIN input yaitu berfungsi sebagai masukkan informasi dari LDR yang kemudian diproses dan menghasilkan output.
11
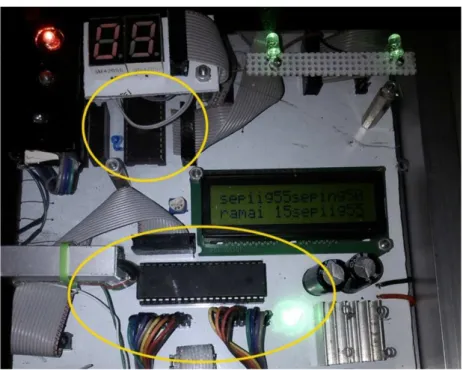
Gambar 3.2 Blok Proses Mikrokontroller ATMEGA16
3.2.1.3 Blok Keluaran (Output)
Blok keluaran terdiri dari LED sebagai traffic light, Seven Segmen sebagai informasi waktu nyala lampu merah, kuning, hijau (countdown timer) dan LCD sebagai informasi kondisi keramaian kendaraan pada setiap sisi jalan.
12
Gambar 3.3 Blok Keluaran LED, Seven Segmen, LCD
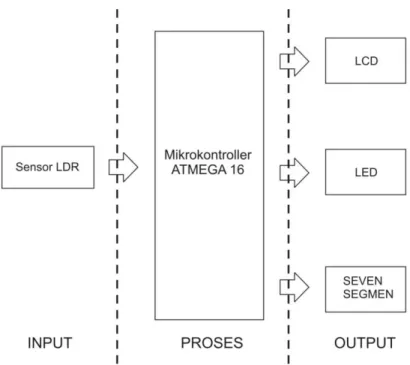
3.3 Rangkaian Keseluruhan
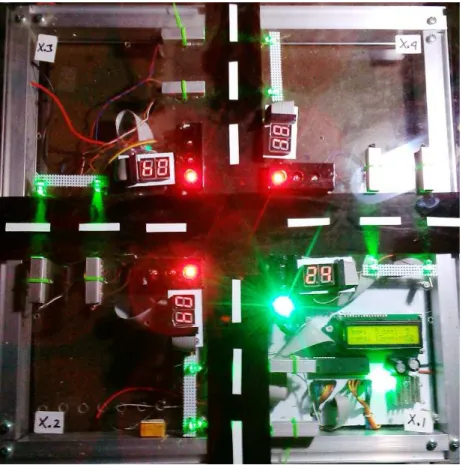
Pada bagian ini menampilkan keseluruhan dari rancangan rangkaian yang dibuat. Dari rangkaian input, process, output. Pada rangkaian mikrokontroller ATMEGA16 membutuhkan aliran tegangan sebesar 9 volt. Pada rangkaian mikrokontroller ATMEGA16 terdiri dari beberapa modul yang digunakan sebagai input dan output sebagai pengendali utama atau proses yang akan digunakan untuk mengendalikan alat. Sebagai pengendali input mikrokontroller ATMEGA16 dihubungkan dengan sensor LDR. Sedangkan pada output, mikrokontroller ATMEGA16 dihubungkan dengan LED, Seven Segmen dan LCD.
13
Gambar 3.4 Prototipe Rangkaian Keseluruhan
3.4 Perancangan Software
Software yang digunakan dalam pembuatan alat ini adalah Software BASCOM AVR. Perancangan program diawali dari alur flowchart yang sudah dibuat, kemudian menuliskan program pada software Bascom-AVR. Kemudian program di compile dalam ekstensi *.HEX. Selanjutnya, dengan software Khazama AVR Programmer, program didownload (dimasukan) ke Atmega16.
4 Implementasi Dan Pembahasan 4.4 Hasil Pengujian Prototipe
Prototipe ini adalah simulasi sistem lampu lalu lintas otomatis. Sistem ini menggunakan sensor LDR sebagai pendeteksi kepadatan kendaraan. Ketika sensor mendeteksi jumlah arus kendaraan dalam kondisi sedang atau ramai maka akan menghasilkan output nyala lampu hijau menjadi lebih lama, sedangkan untuk nyala lampu merah yang terdeteksi jumlah arus kendaraan sepi maka akan menyala lebih lama dan hijau lebih cepat.
14
Kategori kepadatan kendaraan dilihat dari panjang penumpukan kendaraan yang ada pada perempatan lampu merah. Diasumsikan data panjang kendaraan sebagai berikut :
Tabel 4.1 Data Kendaraan
Kendaraan Jenis Panjang
Mobil besar Minibus 4 meter Mobil kecil City car 3 meter Kendaraan panjang dan lebar Truk dan bis 10 eter
Kendaraan yang akan melewati lampu lalu lintas yaitu bervariasi dengan bentuk dan panjang kendaraan yang berbeda beda. Berdasarkan data panjang kendaraan pada table 4.1 dapat dikategorikan kondisi kepadatan kendaraan pada sebuah perempatan lampu merah pada tabel berikut :
Tabel 4.2 Kondisi Kepadatan Lalu Lintas
Kondisi Panjang Penumpukan Kendaraan Sepi Kurang dari 100 meter
Sedang 100 sampai 200 meter Ramai Lebih dari 200 meter
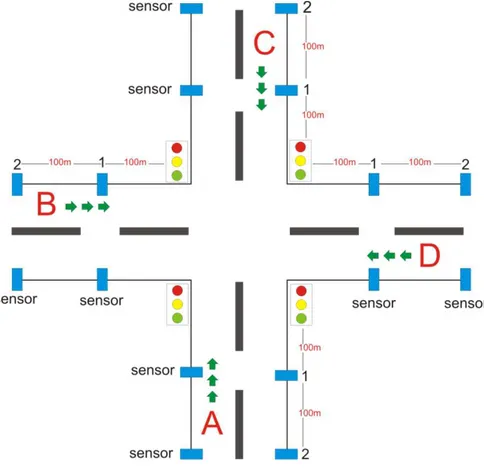
Dari kondisi kepadatan kendaraan di lapangan maka peletakan sensor sebagai pendeteksi kepadatan kendaraan berjarak tiap 100 meter. Sensor 1 dipasang 100 meter dari lampu lalu lintas dan sensor 2 dipasang berjarak 200 meter dari lampu lalu lintas. Ilustrasi skema dapat dilihat pada berikut :
15
Gambar 4.1 Skema Prototipe
Hasil uji coba prototipe dibuat dengan hitungan nyala waktu dalam kondisi sepi adalah hijau 5 detik dan merah 10 detik. Sehingga untuk nilai waktu nyala lampu hijau dan merah dalam kondisi sedang atau ramai dapat dilihat pada gambar dan tabel hasil uji coba berikut ini :
16
Tabel 4.3 Pengujian Sistem Kerja Prototipe
No Sisi Jalan Sensor yang menyala Kondisi (Tampil Di LCD) Waktu Nyala Lampu Hijau
Waktu Nyala Lampu Merah 1. A 0 Sepi 5 B 0 Sepi 5 5 C 0 Sepi 5 10 D 0 Sepi 5 15 2. A 1 Sedang 10 B 0 Sepi 5 10 C 0 Sepi 5 15 D 0 Sepi 5 20 3. A 1 Sedang 10 B 1 Sedang 10 10 C 0 Sepi 5 20 D 0 Sepi 5 25 4. A 1 Sedang 10 B 1 Sedang 10 10 C 0 Sepi 5 20 D 1 Sedang 10 25 5. A 1 Sedang 10 B 2 Ramai 15 10 C 2 Ramai 15 25 D 1 Sedang 10 40 6. A 2 Ramai 15 B 2 Ramai 15 15 C 2 Ramai 15 30 D 2 Ramai 15 45
17
5 Kesimpulan5.4 Kesimpulan
Dari hasil perancangan “ PROTOTIPE SISTEM KONTROL LAMPU LALU LINTAS OTOMATIS MENGGUNAKAN LDR SEBAGAI SENSOR KEPADATAN KENDARAAN BERBASIS MIKROKONTROLLER ATMEGA16 “, dapat ditarik kesimpulan yaitu :
1. Perancangan prototipe lampu lalu lintas otomatis memanfaatkan sensor LDR berbasis mikrokontroller ATMEGA16 terbagi atas dua bagian yaitu perancangan hardware dan software. Perancangan hardware terbagi atas dua buah Mikrokontroller ATMEGA16, LDR, LED, Seven Segmen dan LCD. Sedangkan perancangan software terdiri dari perancangan program basic (BASCOM). 2. Alat ini merupakan prototipe sebagai simulasi dimana sistem lampu rambu lalu
lintas biasa pada sebuah perempatan dibuat menjadi sistem lampu rambu lalu lintas yang pintar dengan adanya sensor yang dapat mendeteksi kepadatan kendaraan. Sehingga ketika jumlah kendaraan pada lampu lalu lintas terdeteksi ramai maka sistem akan bekerja dengan memprioritaskan lampu hijau (jalan) untuk lebih lama dan merah (berhenti) untuk lebih cepat.
3. Alat ini dapat diimplementasikan pada perempatan lampu lalu lintas sebagai sistem yang dapat mengurangi kemacetan atau penumpukan kendaraan pada lampu lalu lintas.
5.5 Saran
Dari perancangan sistem yang telah direalisasikan pada skripsi ini, diharapkan dapat menjadi dasar penelitian lebih lanjut, mengingat banyaknya kekurangan maka perlu pengembangan lebih lanjut pada waktu yang akan datang. Adapun saran-saran untuk skripsi ini adalah :
1. Sistem dibuat lebih pintar, misalnya dapat mendeteksi kendaraan penting seperti mobil ambulance, sehingga ketika kendaraan ambulance melintas lampu lalu lintas akan memprioritaskan arus kendaraan yag akan dilalui mobil ambulance tersebut.
2. Sistem dibuat menggunakan sensor yang lebih optimal untuk mendeteksi kepadatan kendaraan agar dapat diketahui jumlah kendaraan yang melintas setiap harinya.
3. Kedepannya agar sistem ini dapat dikembangkan dan benar benar diimplementasikan pada perempatan lampu lalu lintas.
18
DAFTAR PUSTAKA
Budiharto, Widodo . 2010 . Elektronika Digital dan Mikroprosessor . Jogja : Andi EP, Agfianto . 2010 . Tip dan Trik Mikrokontroler AT89 dan AVR . Jogja : Gava Media Rahman, Achmad . 2003 . Keterampilan Elektronika 3 . Bandung : Ganeca Exact Rika Mayasari,2009,ANALISIS EFEKTIVITAS LAMPU LALU LINTAS
http://eprints.uns.ac.id/4660/1/134810908201008121.pdf Sumisjokartono . 1985 . Elektronika Praktis . Jakarta : Gramedia
Steven F. Barrett University of Wyoming.Arduino Microcontroller Processing for Everyone! Part I.Laramie,WY
Winot, Ardi . 2010 . Mikrokontroler AVR Atmega8/32/16/8535 dan Pemogramannya