194
RANCANG BANGUN SISTEM KONTROL TEMPERATUR UNTUK
PROSES PENDINGINAN MENGGUNAKAN TERMOELEKTRIK
DESIGN AND CONSTRUCTION OF TEMPERATURE CONTROL
SYSTEM FOR COOLING PROCESS USING THERMOELECTRIC
Meqorry Yusfi 1, Wilka putra2, Derisma2 1 Jurusan Fisika FMIPA Universitas Andalas 2
Jurusan Sistem Komputer FTI Universitas Andalas Jln. Kampus Limau Manis Kota Padang 25163
Email : [email protected] ABSTRACT
It has been designed and constructed a temperature control system in a 50x15x25cm box. System is designed using thermoelectric as a cooler element. SHT11 as a sensor will read temperature data and continue the data to ATMega8535 microcontroller then it will be displayed in LCD. Setting point will be inputted in keypad, if setting point different with the real data then thermoelectric module will be activated. PID
method is used to control the temperature. The minimum temperature is -0,20C at the
cooling side. The optimum PID parameter for this system is Kp = 200, Ki = 2, dan Kd = 20. The testing has been done for a couple of condition which resulting different rise time and settling time but it showed the control system has been working good for several conditions.
Keywords: Thermoelectric, SHT11, PID control
ABSTRAK
Telah dirancang bangun sebuah sistem kontrol temperatur pada sebuah box yang berukuran 50x15x25 cm. Sistem dirancang dengan menggunakan termoelektrik sebagai elemen pendingin. SHT11 yang berfungsi sebagai sensor akan membaca data temperatur kemudian data diteruskan ke mikrokontroler ATMega8535 dan ditampilkan pada LCD. Setpoin akan diberikan pada keypad, jika setpoin berbeda dengan data temperatur yang sebenarnya maka akan terjadi proses pendinginan dengan mengaktifkan modul termoelektrik. Pengontrolan terhadap modul termoelektrik dilakukan menggunakan metode PID agar temperatur yang dituju menjadi stabil. Hasil pengujian modul termoelektrik secara langsung diperoleh temperatur minimum yang dapat dicapai pada
sisi dingin adalah -0,20C. Parameter PID yang paling optimal untuk sistem adalah Kp =
200, Ki = 2, dan Kd = 20. Pengujian dilakukan untuk beberapa kondisi yang menghasilkan rise time dan settling time yang berbeda-beda yang memperlihatkan sistem kontrol sudah bekerja dengan baik.
Kata kunci : Termoelektrik, SHT11, kontrol PID
1. PENDAHULUAN
Penggunaan elemen peltier pada sistem kontrol temperatur telah banyak dipakai untuk berbagai aplikasi. Elemen peltier / termoelektrik (TEC) dipakai karena dapat digunakan untuk proses pemanasan atau pendinginan [1]. Termoelektrik menggunakan
195
beberapa termokopel yang disusun seri yang memudahkan perpindahan panas. Umumnya bagian luar komponen ini dibungkus sejenis keramik tipis yang berisikan batang-batang bismuth telluride di dalamnya. Material tersebut adalah suatu semikonduktor yang didalamnya ditambahkan suatu zat tambahan. Zat tambahan tersebut bertujuan untuk memberikan kelebihan elektron bebas (N-type semikonduktor) atau memberikan kekurangan elektron bebas (P-type semikonduktor). Skema elemen perltier dapat dilihat pada Gambar 1.
Gambar 1 Skema Elemen peltier [4]
Elektron dari material yang kekurangan elektron (P-type material) bergerak ke material yang kelebihan elektron (N-type material). Dalam keadaan ini maka konektor akan menyerap energi sehingga sisi ini akan menjadi sisi dingin dari peltier. Di lain pihak, ketika elektron bergerak dari N-type menuju P-type, maka konektor akan melepas energi sehingga sisi ini akan menjadi sisi panas dari peltier. Perbedaan temperatur inilah yang akan menghasilkan beda tegangan. Tegangan pada modul termoelektrik (V) adalah [2]:
= ( − ) + (1)
dimana Rm adalah resistansi elektris (Ohm) , am adalah koefisien seeback (V/0C), Th
temperatur pada sisi panas (0C), Tc temperatur pada sisi dingan(0C) dan I adalah arus
yang melalui elemen peltier (A). Persamaan 1 tersebut menggambarkan, modul peltier bergantung kepada perbedaan temperatur pada kedua sisi( − ).
Pendeteksian perbedaan temperatur yang dihasilkan oleh elemen pertier menggunakan SHT11. SHT11 merupakan modul sensor suhu dan kelembaban relatif yang berbasis sensor SHT11 dari Sensirion. Modul ini dapat digunakan sebagai alat pengindra suhu dan kelembaban dalam aplikasi pengendali suhu dan kelembaban ruangan maupun aplikasi pemantau suhu dan kelembaban relatif ruangan.
196 Kontrol PID
PID merupakan kombinasi dari 3 buah kontroler yaitu Proporsional, Integral dan Derivatif. Keuntungan yang terdapat pada ketiga pengendali tersebut tergabung pada kontrol PID [5]. Kontrol PID memiliki beberapa kegunaan diantaranya : terdapat umpan balik, memiliki kemampuan dalam menghilangkan steady state error malalui pengendali integral, dapat melakukan prediksi terhadap kemungkinan kedepannya melalui pengendali derivatif. Kontrol PID banyak digunakan pada seluruh kegiatan industri dalam bentuk yang berbeda-beda [6].
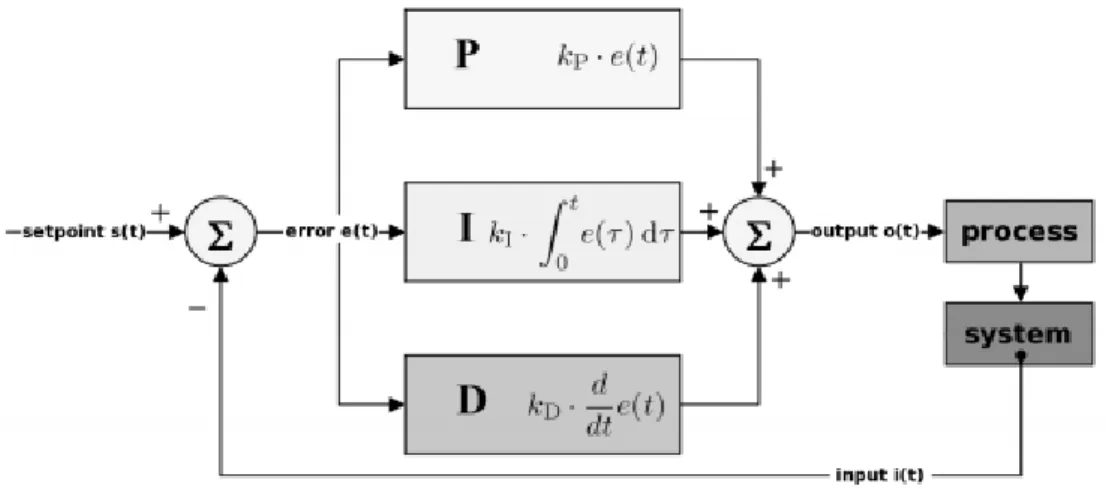
Diagram blok PID dapat dilihat pada Gambar 2.
Gambar 2 Diagram blok PID [3]
Secara umum algoritma kontrol PID dapat kita gambarkan dalam persamaan berikut [3][7] :
( ) = ( ) + ∫ ( ) + ( ) (2)
Dengan u sebagai variabel kontrol, e sebagai eror kontrol ( = − ). Kp, Ki dan Kd adalah konstanta untuk proposional integral dan derivative.
2. METODE PENELITIAN
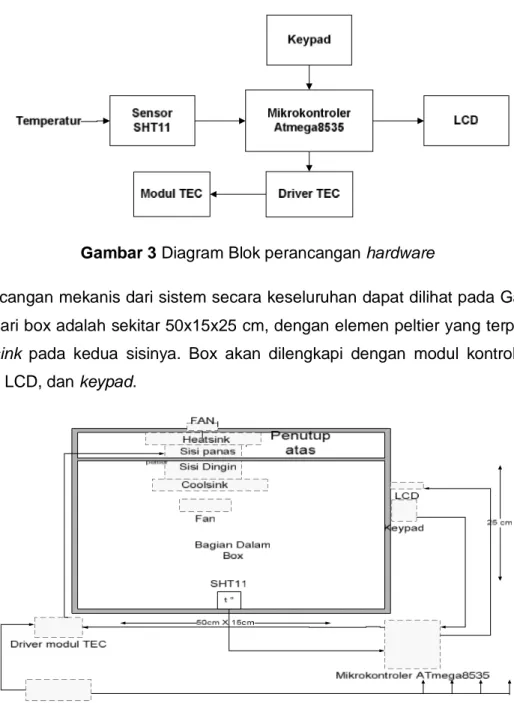
Perancangan alat sistem kontrol temperatur untuk pendinginan ruangan meliputi perancangan hardware dan software. Diagram blok perancangan hardware dapat dilihat pada Gambar 3. Pada Gambar terlihat bahwa Sensor SHT11 akan membaca data temperatur ruang kemudian data diteruskan ke mikrokontroler Atmega8535 dan ditampilkan di LCD. Keypad berfungsi untuk memberikan input setting temperatur yang diinginan. Jika temperatur yang terbaca berbeda dengan setting temperatur maka proses pendinginan akan dilakukan dengan mengaktifkan modul TEC melalui driver TEC. Modul
197
TEC yang dipakai yaitu TEC1-12706 merupakan salah satu modul termoelektrik yang bekerja dengan menggunakan arus DC yang berfungsi sebagai elemen pendingin temperatur ruang. Modul TEC akan beroperasi berdasarkan besar daya yang diberikan oleh driver. Modul dirangkai dengan heatsink, coolsink dan kipas agar proses pendinginan optimal.
Gambar 3 Diagram Blok perancangan hardware
Perancangan mekanis dari sistem secara keseluruhan dapat dilihat pada Gambar 4. Dimensi dari box adalah sekitar 50x15x25 cm, dengan elemen peltier yang terpasang dengan heasink pada kedua sisinya. Box akan dilengkapi dengan modul kontrol, catu daya, sensor, LCD, dan keypad.
198
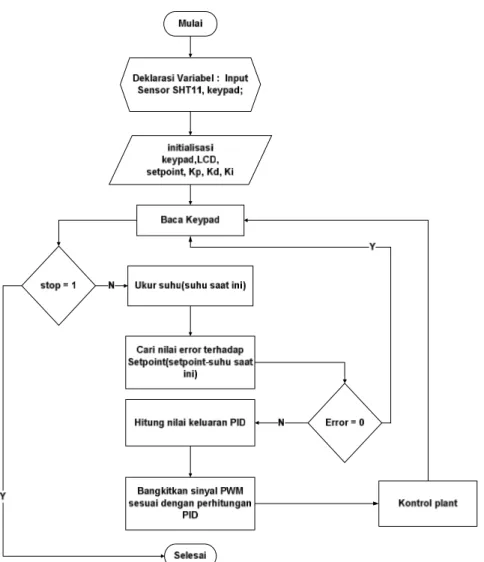
Perancangan software dibuat untuk mengontrol temperatur dengan menggunakan metode PID. Flowchart dari sistem kontrol temperatur untuk proses pendinginan dapat dilihat pada Gambar 5.
Gambar 5 Flowchart Kontrol Temperatur
3. HASIL DAN ANALISA
3.1 Pengujian Pengaruh Tegangan pada Pendinginan Termoleletrik
Pengujian ini bertujuan untuk mengetahui kemampuan dari termoelektrik dalam mendinginkan atau menurunkan temperatur dengan memvariasikan nilai tegangan yang digunakan. Pengujian dilakukan dengan mengukur temperatur secara langsung pada sisi
199
dingin termoelektrik dengan menggunakan thermometer. Data diambil selama 100 detik. Hasil pengujian dapat dilihat pada Tabel 1
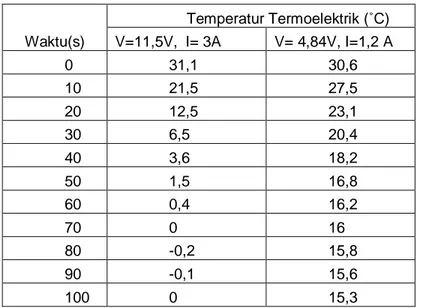
Tabel 1. Data Pengujian Temperatur Sisi Dingin Termoelektrik
Waktu(s) Temperatur Termoelektrik (˚C) V=11,5V, I= 3A V= 4,84V, I=1,2 A 0 31,1 30,6 10 21,5 27,5 20 12,5 23,1 30 6,5 20,4 40 3,6 18,2 50 1,5 16,8 60 0,4 16,2 70 0 16 80 -0,2 15,8 90 -0,1 15,6 100 0 15,3
Dari data pada Tabel 1 dapat kita lihat bahwa perbedaan nilai tegangan akan berdampak terhadap kemampuan dari termoelektrik dalam melakukan proses pendinginan. Dari percobaan pertama menggunakan tegangan sekitar 11,5 V dengan arus 3A, sisi dingin termoelektrik dapat mencapai temperatur hingga -0.2˚C. Berbeda dengan pada saat tegangan diberikan sebesar 4,84V dengan arus 1,2A, sisi dingin termoelektrik hanya mampu mencapai temperatur 15.3 ˚C untuk waktu pendinginan selama 100 detik. Laju pendinginan dengan nilai tegangan yang lebih besar juga berlangsung lebih cepat dibandingkan nilai tegangan yang kecil.
3.2 Pengujian Respon Open Loop Sistem
Setelah dilakukan pengujian langsung pada sisi dingin termoelektrik, maka elemen peltier dipasang pada alat seperti pada Gambar 6. Pada setiap sisi termoelektrik akan dipasang logam sebagai media penyaluran suhu. Sisi dingin untuk bagian dalam box, serta sisi panas sebagai pembuang panas pada bagian luar. Logam yang digunakan adalah alumunium yang relatif cepat dalam mengantarkan panas atau dingin.
200
Gambar 6 Alat secara keseluruhan
Sebelum dilakukan proses pengontrolan, dilakukan pengujian thermoelektrik secara open loop, atau tanpa sistem kontrol. Pengujian dilakukan pada dua kondisi lingkungan yang berbeda. Pertama pada kondisi siang, temperatur pada siang hari dalam rentang 30-34˚C. Kondisi kedua malam hari dengan temperatur lingkungan berada dalam rentang 26-29˚C. Hasil pengujian pendinginan box dapat kita lihat pada gambar 7
Gambar 7 Grafik Pengujian pendinginan pada box
Dari Gambar 7 diatas dapat kita lihat bahwa pada saat siang hari alat dapat menurunkan temperatur hingga mencapai 25˚C dalam kurun waktu 4080 detik dengan kecepatan rata-rata 0,002˚C/s. Pada saat malam hari dalam kurun waktu tersebut alat dapat mencapai hingga temperatur 19,88˚C. Jika temperatur lingkungan masih berkisar antara 30-34˚C maka alat dapat menurunkan hingga temperatur 24˚C batas maksimumnya. Begitupun dengan keadaan pada malam hari, jika temperatur masih berada dalam rentang 26-29˚C maka alat dapat menurunkan temperatur hingga 18˚C. Hal
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 0 540 1080 1620 2160 2700 3240 3780 4320 4860
Te
m
p
e
ra
tu
r
(C
)
Waktu (s)
malam (C) siang (C)201
ini disebabkan oleh pengaruh dari temperatur lingkungan. Selain mempengaruhi secara langsung terhadap temperatur dalam box, temperatur lingkungan juga mempengaruhi pembuangan panas pada sisi panas termoelektrik, yang berdampak pada dingin yang dihasilkan oleh sisi dingin termoelektrik.
3.3 Pengujian Respon kontrol PID
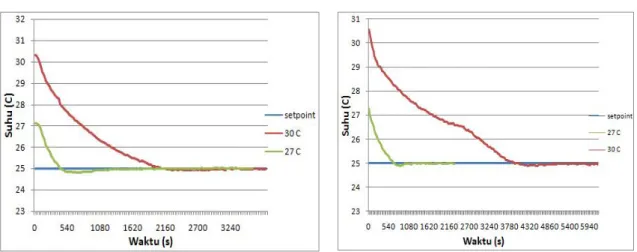
Setelah mendapatkan penalaan parameter PID yang paling optimal dengan menggunakan metode trial and error atau coba-coba yaitu Kp = 200, Ki = 2, dan Kd = 20, selanjutnya dilakukan pengujian respon sistem terhadap objek. Objek yang digunakan dalam pengujian ini adalah beberapa jenis obat-obatan dan minuman kaleng/botol. Pengujian dilakukan untuk beberapa kondisi temperatur lingkungan untuk masing-masing objek yaitu antara 27˚ C sampai 33˚ C.
(a) (b)
Gambar 8 (a) Pengujian Respon Sistem untuk Objek Obat (b) Pengujian Respon Sistem untuk Objek Minuman
Pada Gambar 8(a) Pengujian respon sistem untuk objek obat, saat suhu lingkungan sekitar 30˚C respon sistem menghasilkan overshoot sebesar 0,4% dan steady state error sebesar 0,19% dengan rise time 2100 detik dan settling time 3300 detik. Pada keadaan 27˚C terdapat lebih besar overshoot yaitu sebesar 0,8% dan steady state error sebesar 0,06% dengan rise time 420 detik dan settling time 1260 detik. Sedangkan pada Gambar 8(b) Pengujian respon sistem untuk objek minuman, pada saat suhu awal 27˚C rise time yang dibutuhkan sistem adalah sebesar 690 detik dan settling time sebesar 1140 detik. Overshoot yang dihasilkan sekitar 0,44% dengan steady state error sebesar 0,07%. Ketika suhu awal 30˚C, rise time dari sistem adalah 3930 detik dan settling time 5010. Overshoot yang dihasilkan sebesar 0,48% dengan steady state error 0,15%. Pada kedua grafik diatas dapat kita lihat, objek obat lebih cepat dalam mencapai steady state error daripada objek minuman, namun memiliki overshoot yang lebih besar.
202
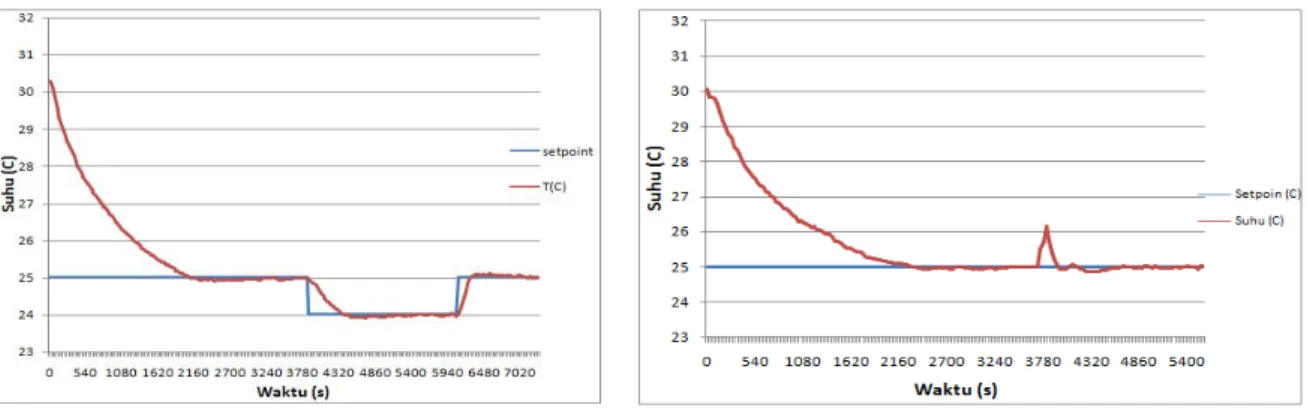
Pengujian respon sistem kontrol PID yang berikutnya dilakukan dengan melakukan perubahan nilai setpoin serta memberikan gangguan pada sistem selama proses pendinginan berlangsung. Hasil pengujian dapat dilihat pada Gambar 9.
Gambar 9 Pengujian respon sistem jika (a) setpoint berubah (b) terjadi gangguan
Pada Gambar 9 terlihat bahwa sistem kontrol pendinginan ruangan telah berhasil memberikan respon yang baik pada keadaan dimana setpoin nya berubah-ubah (a) atau diberikan gangguan dari luar seperti jika box dibuka (b). Keadaan tersebut mengakibatkan temperatur lingkungan akan masuk ke dalam box menyebabkan temperatur jadi naik seketika, namun jika ditutup kembali, maka sistem kontrol PID akan bekerja untuk menstabikan temperatur kembali sesuai dengan setpoin yang diinginkan.
4. KESIMPULAN DAN SARAN
Berdasarkan pengujian dan analisa yang telah dilakukan, maka dapat disimpulkan bahwa
1. Nilai tegangan yang lebih besar memiliki laju pendinginan lebih cepat dibandingkan nilai tegangan yang kecil. Nilai temperatur minimum pada sisi dingin termoelektrik dapat mencapai temperatur hingga -0.2˚C untuk tegangan yang besar (11,5 V). 2. Penurunan temperatur pada siang hanya mencapai 25˚C dalam kurun waktu 4080
detik dengan kecepatan rata-rata 0,002˚C/s.
3. Parameter Kp = 200, Ki = 2, Kd = 20 pada sistem kontrol pendinginan ruang telah bekerja dengan baik untuk beberapa keadaan dengan terbukti mampu mencapai setpoin kembali jika diberikan gangguan.
Beberapa perbaikan dirasa masih perlu dilakukan untuk meningkatkan kinerja alat dan pengembangannya lebih lanjut. Oleh sebab itu, penulis memberikan beberapa saran diantaranya :
203
1. Menggunakan sensor lain yang dapat menghasilkan eror yang lebih kecil, seperti SHT15 dan RTD pt 100.
2. Penggantian sistem kontrol untuk meningkatkan respon yang lebih baik
5. DAFTAR PUSTAKA
[1.] Pathak, Abinav and Goel, Vikas. Heat Pump Design Using Peltier Element for Temperature Control of The Flow Cell. International Journal of Computer Science, Engineering and Applications(IJCSEA). 2013 June; 3(3): 41-47.
[2.] Gabert, Anders. Temperature Stabilization of Electronics Module. Master’s Thesis. Dept. Of Computer Science and Electrical Engineering Lulea University of
Technology. 2006.
[3.] Nieswand, Simon. A Peltier Cooling System for SiPM Temperature Stabilization. Bachelor’s Thesis. Aachen University. 2012.
[4.] Tellurex Corporation. An introduction to thermoelectric. Tellurex Corporation. Miami. 2006
[5.] Ogata, Katsuhiko. Modern Control Engineering 5th Edition. Prentice-Hall : New Jersey. 2010.
[6.] Astrom, Karl J and Hagglund,Tore. PID Controller : Theory, Design, and Tuning 2nd Edition. Instrument Society of Amerika : USA. 1995.
[7.] Lindu Bhakti, tatag et all. Design of Bovine Semen Temperature Controller Using PID. International Journal of Computational Engineering Research. November 2012; 2(7): 52-58.
![Gambar 1 Skema Elemen peltier [4]](https://thumb-ap.123doks.com/thumbv2/123dok/2147315.3542304/2.892.329.643.345.558/gambar-skema-elemen-peltier.webp)