Pengontrolan Temperatur Menggunakan Metode Kontrol PID
Berbasis Mikrokontroler AT90S8515
Agung S. Majid (L2F098579)
Jurusan Teknik Elektro Fakultas Teknik Universitas Diponegoro Email : [email protected]
Abstrak Budidaya ikan Kerapu banyak dilakukan pada karamba jaring apung (kajapung) yang berada di perairan di lepas
pantai. Namun demikian, banyak kendala yang dihadapi para peternak ikan Kerapu.
Penelitian ini bertujuan memberikan sebuah alternatif pembudidayaan ikan Kerapu di darat, dengan cara membuat habitat air laut tiruan pada sebuah akuarium dengan parameter – parameter (suhu, kadar garam, kadar oksigen, pH dan kecepatan arus air) yang dikontrol sesuai dengan karakteristik habitat aslinya.
Pada tugas akhir ini dilakukan perancangan dan pembuatan pengontrol suhu berbasis mikrokontroler AVR AT90S8515. Secara umum proses yang terjadi adalah proses pengambilan data setpoint, proses pendefinisian variabel-variabel kontrol yang penting, proses perhitungan aksi kontrol dan algoritma kontrol, dan proses penyimpanan data yang diperlukan. Untuk mengetahui kemampuan dan unjuk kerja dari alat/sistem yang dirancang, maka sistem diaplikasikan untuk melakukan pengaturan temperatur air akuarium.
I. PENDAHULUAN 1.1 Latar Belakang
Wilayah perairan Indonesia yang memiliki luas hampir 2/3 dari luas daratan, memiliki potensi pengembangan dan budidaya perikanan yang besar. Terdapat banyak sumber daya perikanan yang dapat dijadikan komoditas ekspor andalan sebagai sumber penghasil devisa negara. Salah satu ikan laut komersil yang sekarang banyak dibudidayakan dan merupakan komoditas ekspor yaitu ikan Kerapu.
Tugas Akhir ini merancang alat/sistem untuk melakukan pengaturan daya pemanas secara kontrol fasa pada sistem pengaturan temperatur dengan menggunakan algoritma kontrol PID yang akan diterapkan pada akuarium. 1.2 Tujuan Tugas Akhir
Membuat sebuah aplikasi sistem kontrol PID pada pengontrolan temperatur yang meliputi pembuatan perangkat lunak dan perangkat keras berbasis mikrokontroler AT90S8515.
1.3 Batasan Masalah
Pembahasan dalam tugas akhir ini dibatasi oleh : 1. Obyek pengaturan adalah temperatur akuarium dengan
kisaran ukur antara 27 oC hingga 32 oC.
2. Aplikasi alat yang dibuat hanya untuk proses pemanasan.
3. Metode pengaturan yang digunakan adalah PID (Proporsional Integral Derivatif) yang diimplementasikan secara digital.
4. Metode penalaan kontrol PID yang digunakan adalah metode manual (trial and error).
5. Instrumen pengatur berupa sistem minimum berbasis AT90S8515.
6. Tidak dilakukan pemodelan sistem sehingga persamaan matematis sistem tidak diketahui.
7. Pengujian instrumen hanya dilakukan pada plant akuarium.
8. Tidak memperhitungkan efek perpindahan panas yang terjadi dari sistem ke lingkungan atau sebaliknya. 9. Pengontrol tegangan AC yang digunakan adalah
pengontrolan sudut fase, dan digunakan triac sebagai komponen pengatur tegangan. Pengamatan hanya
dilakukan pada bentuk sinyal pemicu dan gelombang keluaran.
10. Tidak memperhitungkan perubahan volume dalam jumlah besar.
II. DASAR TEORI 2.1 Sistem Pengaturan Temperatur [6], [10], [20]
Suatu sistem termal ditunjukkan pada Gambar 2.1. Cairan dengan temperatur T (C) mengalir keluar dari tangki dengan laju tertentu dan cairan ini digantikan dengan cairan yang masuk ke tangki dengan temperatur Ti (C), dimana Ti < T. Cairan yang berada di dalam tangki dipanaskan menggunakan sebuah pemanas (heater) listrik. Cairan diaduk sedemikian rupa sehingga seluruh cairan yang berada dalam tangki dapat dianggap memiliki temperatur yang sama.
Gambar 2.1 Sistem termal
Dalam kasus sistem kontrol, temperatur T adalah variabel yang akan dikontrol, dan nilai T inilah yang diinginkan sebagai output. Kemudian input kontrol adalah output dari pemanas listrik (electric heater) qe. Sedangkan Ti dan Ta disebut input-input gangguan, atau dikenal sebagai gangguan dimana input berupa gangguan ini tidak dikontrol. Besarnya kalor sebagai input kontrol selalu diatur dengan mengatur tegangan yang diberikan ke pemanas. Jika pemanas dimodelkan sebagai suatu beban resistif, maka besarnya kalor per unit waktu adalah:
(2-1) h h R V P 2
Dengan P adalah daya pemanas (watt), Vh adalah tegangan efektif (volt) yang diberikan ke pemanas, dan Rh adalah resistansi pemanas (ohm). Ini menunjukkan bahwa energi listrik yang dikonversi ke pemanas merupakan sebuah fungsi nonlinier terhadap tegangan yang diberikan ke pemanas, dan tidak dapat diperoleh transfer function yang menunjukkan hubungan antara temperatur T dengan tegangan input Vh. Namun telah ditunjukkan bahwa besarnya temperatur dapat diatur dengan mengatur besarnya tegangan yang diberikan ke pemanas.
2.2 Pengontrol Tegangan AC[5], [15], [17]
Untuk transfer energi, dua jenis pengontrol yang biasa digunakan yaitu: Kontrol on-off dan Kontrol sudut fasa. Pada kontrol on-off, saklar thyristor menghubungkan beban dengan sumber ac selama beberapa putaran tegangan masukan dan diputus selama beberapa putaran yang lain. Pada kontrol sudut fasa, saklar thyristor menghubungkan beban dengan sumber ac untuk setiap bagian dari putaran tegangan masukan. Sehingga bila dibandingkan dengan kontrol on-off, kontrol sudut fasa dapat memberikan range pengaturan tegangan secara penuh.
2.2.1 Prinsip Kontrol Sudut Fasa
Prinsip dari kontrol sudut fasa untuk gelombang penuh satu fasa dapat dijelaskan berdasarkan rangkaian pada Gambar 2.2. Energi mengalir ke beban dikontrol dengan menunda sudut pemicuan (firing angle) thyristor T1 dan sudut
pemicuan thyristor T2
Gambar 2.2 Rangkaian pengontrol gelombang penuh satu fasa
2.2.2 Triac
Triac dapat bersifat konduktif dalam dua arah. Dalam hal ini dapat dianggap sebagai dua buah thyristor tersambung secara antiparalel. Karena triac merupakan komponen bidirectional, terminalnya tidak dapat ditentukan sebagai anode/katode. Koneksi-koneksinya diberi nama main
terminal 1 (MT1), main terminal 2 (MT2) dan gate atau
gerbang (G).
2.3 Mikrokontroler AT90S8515
Untuk mengimplementasikan sistem pengendali berbasis algoritma sistem kontrol PID digital digunakan mikrokontroler AT90S8515 produksi Atmel. Mikrokontroler ini memiliki fitur yang hampir sama dengan mikrokontroler buatan Atmel sebelumnya yaitu AT89C5x sehingga bagi para praktisi yang sudah terbiasa menggunakan At89C5x tersebut akan lebih mudah untuk memahami bagaimana menggunakan AT90S8515.
Mikrokontroler AT90S8515 memiliki beberapa keistimewaan antara lain: arsitektur RISC (Reduced Instruction Set Computer), 118 instruksi sebagian besar satu
siklus instruksi, 32x8 register kerja serbaguna, 8 MIPS
(Mega Instructions per Second) pada 8 MHZ, 8 Kbytes
In-System Programmable Flash (1000 siklus hapus/tulis), 512 bytes SRAM, 512 bytes In-System Programmable EEPROM
(100.000 siklus hapus/tulis), pemrograman terkunci untuk program Flash dan keamanan data pada EEPROM, satu 8 bit
timer/counter dengan Prescaler terpisah, satu 16 bit timer/counter dengan Prescaler terpisah yang dapat
digunakan untuk mode Compare, Mode Capture dan dual 8,9,atau 10 bit PWM, Analog comparator dalam chip, pewaktu Watchdog terprogram dengan Osilator dalam chip, UART serial terprogram,antarmuka serial SPI master/slave, mode power down dan catu rendah senggang, sumber interupsi internal dan eksternal, dan 32 jalur I/O terprogram. 2.4 ADC 0804
IC ADC 0804 adalah pengubah analog ke digital CMOS 8 bit. Beberapa karakteristik penting dari ADC 0804 adalah:
Mempunyai dua masukan analog yaitu : Vin(+) dan Vin(-)
Mengkonversikan masukan tegangan analog menjadi keluaran digital 8 bit dengan range 0 sampai 5 V. Mempunyai rangkaian clock internal, yang dapat
menghasilkan frekuensi clock sebesar f = 1/(1.1RC). Dengan frekuensi clock 640 KHz waktu konversinya
adalah sekitar 100 S.
ADC 0804 didesain untuk mudah dihubungkan dengan bus data suatu sistem mikroprosesor.
2.5 Aksi Kontrol Proporsional plus Integral (PI) [8],[9] Aksi kontrol dari kontroler proporsional plus integral plus differensial didefinisikan dengan persamaan 2-2.
dt de T d e T e Kp u d t i 0 * 1 ( 2-2 )dengan u adalah sinyal kontrol, e adalah kesalahan (error),
de/dt adalah perubahan kesalahan dan Kp, Ti dan Td
berturut-turut adalah penguatan proporsional, konstanta waktu integral dan derivatif.
Dalam bentuk diskrit dengan menggunakan aproksimasi numerik integral error, e(k) =
(e(k-1)+2e(k-1)+e(k-2))T, persamaan (2-16) dapat ditulis menjadi
( ) ( 1)
) 2 ( ) 1 ( 2 ) ( ) ( ) ( ) ( ) ( ) ( ) ( 1
k e k e K T k e k e k e T K k e K k u k e K i T K k e K k u D I P n i D s I P (2-3)Dalam bentuk fungsi alih T s s T Kp s G d i c 1 1 ) ( (2-4)
dengan Kp adalah penguat proporsional, Ti= Kp/Ki adalah konstanta waktu integral, dengan Td=Kp/Kd adalah konstanta waktu derivatif.
2.6 Ikan Kerapu
Ikan Kerapu menyenangi air laut berkadar garam 33 – 35 ppt (part per thousand ). Suhu perairan di Indonesia tidak menjadi masalah karena perubahan suhu, baik harian maupun tahunan sangat kecil ( 27 – 32 derajat C). Kadar oksigen dari habitat ikan Kerapu sendiri adalah sebesar ± 4 ppm. Untuk kadar keasaman (pH) air laut yang menjadi habitat ikan Kerapu adalah 7,6 – 7,8. Sedangkan besarnya kecepatan arus air yang ideal adalah sekitar 20 sampai 40 cm/detik[20],[21].
Dengan adanya arus air yang mengalir akan sangat berguna untuk membantu pertukaran air, membersihkan
T1 T2
I
sv
sI
o Vo R+
+
_
_
timbunan sisa-sisa metabolisme ikan, dan membawa oksigen terlarut yang sangat dibutuhkan ikan. Namun arus yang berlebihan dapat menyebabkan ikan menjadi stress, energi banyak terbuang dan selera makan berkurang[20].
III. PERANCANGAN ALAT 3.1 Perancangan Perangkat Keras
Blok diagram dari sistem yang dibuat pada perancangan Tugas Akhir ini secara keseluruhan dapat dilihat pada Gambar 3.1.
Gambar 3.1 Diagram blok perancangan perangkat keras
3.1.2 Sistem Minimum Mikrokontroler AT90S8515 Mikrokontroler AT90S8515 berfungsi sebagai penerima data masukan, melakukan pengontrolan dengan menggunakan algoritma kontrol PID, dan menghasilkan keluaran yang digunakan oleh aktuator untuk melakukan aksi kontrol secara fisik terhadap obyek pengaturan. Port A digunakan sebagai pengemudi tampilan LCD. Port B digunakan sebagai penerima masukan data dari ADC. Port C berfungsi sebagai penerima masukan keypad. Port D sebagian difungsikan sebagai masukan dan sebagian sebagai keluaran, yaitu pin 0 dan 1 untuk komunikasi serial dengan PC, pin 2 dan 3 untuk interupsi eksternal, pin 4 untuk pemberian sinyal picu triac yang akan digunakan untuk mengatur pemberian tegangan ke pemanas, pin 5 untuk penyalaan LED indikator, dan pin 6 dan 7 untuk pemberian sinyal RD dan WR pada ADC 0804.
Gambar 3.2 Alokasi port pada sistem minimum mikrokontroler AT90S8515
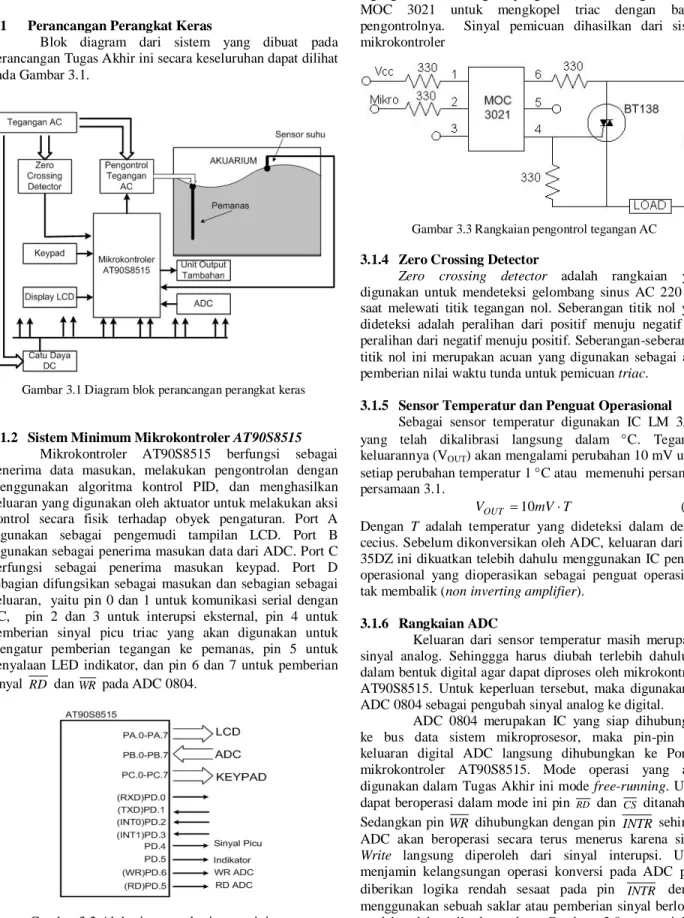
3.1.3 Pengontrol Tegangan AC
Gambar 3.4 merupakan rancangan rangkaian untuk pengontrol tegangan AC gelombang penuh satu fasa. Sebagai komponen pengontrol tegangan digunakan triac BT 138. Agar tidak membahayakan bagian yang mempunyai level tegangan rendah (bagian pengontrol), maka digunakan IC MOC 3021 untuk mengkopel triac dengan bagian pengontrolnya. Sinyal pemicuan dihasilkan dari sistem mikrokontroler
Gambar 3.3 Rangkaian pengontrol tegangan AC
3.1.4 Zero Crossing Detector
Zero crossing detector adalah rangkaian yang
digunakan untuk mendeteksi gelombang sinus AC 220 volt saat melewati titik tegangan nol. Seberangan titik nol yang dideteksi adalah peralihan dari positif menuju negatif dan peralihan dari negatif menuju positif. Seberangan-seberangan titik nol ini merupakan acuan yang digunakan sebagai awal pemberian nilai waktu tunda untuk pemicuan triac.
3.1.5 Sensor Temperatur dan Penguat Operasional Sebagai sensor temperatur digunakan IC LM 35DZ yang telah dikalibrasi langsung dalam C. Tegangan keluarannya (VOUT) akan mengalami perubahan 10 mV untuk
setiap perubahan temperatur 1 C atau memenuhi persamaan persamaan 3.1.
T mV
VOUT 10 (3-1) Dengan T adalah temperatur yang dideteksi dalam derajat cecius. Sebelum dikonversikan oleh ADC, keluaran dari LM 35DZ ini dikuatkan telebih dahulu menggunakan IC penguat operasional yang dioperasikan sebagai penguat operasional tak membalik (non inverting amplifier).
3.1.6 Rangkaian ADC
Keluaran dari sensor temperatur masih merupakan sinyal analog. Sehinggga harus diubah terlebih dahulu ke dalam bentuk digital agar dapat diproses oleh mikrokontroler AT90S8515. Untuk keperluan tersebut, maka digunakan IC ADC 0804 sebagai pengubah sinyal analog ke digital.
ADC 0804 merupakan IC yang siap dihubungkan ke bus data sistem mikroprosesor, maka pin-pin data keluaran digital ADC langsung dihubungkan ke Port B mikrokontroler AT90S8515. Mode operasi yang akan digunakan dalam Tugas Akhir ini mode free-running. Untuk dapat beroperasi dalam mode ini pin RD dan CS ditanahkan.
Sedangkan pin WR dihubungkan dengan pin INTR sehingga ADC akan beroperasi secara terus menerus karena sinyal
Write langsung diperoleh dari sinyal interupsi. Untuk
menjamin kelangsungan operasi konversi pada ADC perlu diberikan logika rendah sesaat pada pin INTR dengan menggunakan sebuah saklar atau pemberian sinyal berlogika rendah oleh mikrokontroler. Gambar 3.8 menunjukkan rangkaian penggunaan ADC 0804.
3.1.7 Rangkaian Display
Untuk menampilkan beberapa parameter serta hasil pengaturan yang dilakukan, dipakai sebuah Liquid Crystal Display (LCD) 2x16 karakter yang kompatibel dengan LCD standar industri HD44780 dengan mode transfer data 4 bit.
3.1.8 Perancangan Unit Masukan
Unit masukan berfungsi untuk memberikan nilai bagi parameter-parameter pengontrolan yang digunakan seperti setpoint, penguatan, serta mode operasi. Sebagai unit masukan digunakan sebuah keypad matriks 4x4 dengan konfigurasi yang dapat dilihat pada Gambar 3.4.
Gambar 3.4 Konfigurasi keypad 3.1.9 Catu Daya DC
Catu daya dc digunakan untuk mencatu rangkaian-rangkaian yang membentuk perangkat keras. Catu daya yang digunakan adalah catu daya dc +5 volt, yaitu untuk semua blok rangkaian perangkat keras. Namun khusus untuk IC LM 741 digunakan catu daya simetris +12 volt dan –12 volt. Catu daya dc +12 volt juga digunakan untuk IC sensor temperatur LM 35. Untuk menghasilkan tegangan konstan +5 volt digunakan IC regulator 7805, karena keluarannya yaitu +5 volt banyak digunakan untuk mensuplay rangkaian pada perangkat keras, maka arus keluarannya dinaikkan dengan bantuan trasistor daya yaitu 2N3055. Sedangkan untuk menghasilkan tegangan konstan +12 volt digunakan IC regulator 7812 dan untuk tegangan konstan –12 volt digunakan IC regulator 7912.
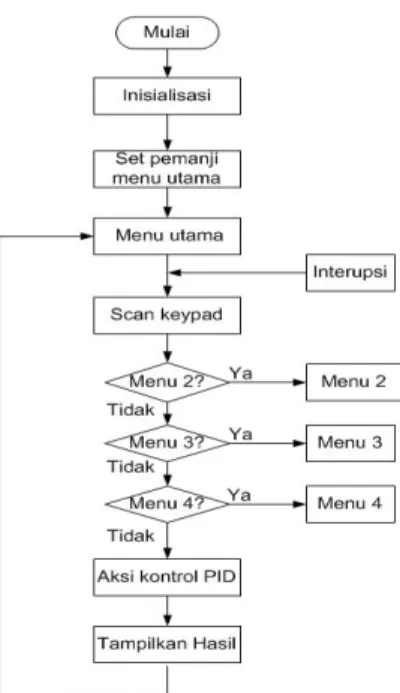
3.2 Perancangan Perangkat Lunak 3.2.1 Perancangan Program Utama
Perancangan perangkat lunak ini secara garis besar bertujuan untuk mengatur kerja sistem seperti pembacaan hasil sensor, proses pengaturan temperatur sistem dengan menggunakan algoritma kontrol PID digital, serta menghasilkan sinyal pemicuan triac yang akan menggerakkan aktuator. Dengan demikian perancangan perangkat lunak ini meliputi program utama serta beberapa fungsi-fungsi pendukung. Program utama berperan sebagai jantung perangkat lunak yang akan mengatur keseluruhan operasi yang melibatkan fungsi-fungsi pendukung. Sedangkan fungsi-fungsi pendukung akan melakukan kerja khusus sesuai kebutuhan dari program utama.
Dari diagram alir program utama pada Gambar 3.5 dapat terlihat bahwa program dimulai dengan melakukan inisialisasi semua variabel-variabel utama dari proses pengontrolan dan mikrokontroler.
Terlihat pula program terbagi dalam beberapa 4 menu termasuk menu utama yang memiliki fungsi yang berbeda. Menu utama sebagai default berfungsi untuk
memasukkan nilai-nilai penguatan yang diperlukan seperti Kp, Ki, dan Kd serta nilai setpoint.
Setelah semua nilai dimasukkan, proses pengontrolan temperatur dengan menggunakan aksi kontrol PID dilakukan dengan menekan tombol menu 2 dan menampilkan hasilnya pada LCD berupa tampilan setpoint dan suhu aktual, serta menampilkan hasil sampling suhu setiap 0,5 detik ke komputer melalui komunikasi serial RS 232 yang akan digunakan untuk pembuatan grafik analisa respon suhu hasil pengaturan.
Gambar 3.5 Diagram alir program utama 3.2.2 Kontrol PID
Proses pengontrolan dengan menggunakan algoritma kontrol PID digital diimplementasikan dalam program sebagai berikut:
void kontrol(void) { int integral; int deriv; integral=0; error = SP-suhu;
deriv = error - error_akhir; integral += error;
output = (int)(Kprop*error + Kint*integral + Kderiv*deriv); if (output>Maxoutput) output=Maxoutput; if (output<Minoutput) output=Minoutput; tunda=40000-output*160; OCR1A=tunda; error_akhir=error; } 3.2.3 Interupsi
3.2.3.1 Interupsi Eksternal INT0
Sumber interupsi ini adalah pemicuan sisi turun dari sinyal yang dihasilkan oleh rangkaian zero cross detector. Setiap terjadi interupsi, maka Timer A akan diaktifkan dengan memberikan nilai 0x09 pada register TCCR1B.
3.2.3.2 Interupsi Timer 0
Interupsi ini bersumber pada limpahan pencacah 8 bit yang digunakan untuk menentukan pewaktuan jam digital serta proses sampling suhu yang terdeteksi oleh sensor suhu. 3.2.3.3 Interupsi Compare Match A
Interupsi ini akan terjadi bila nilai pencacah sama dengan nilai tundaan hasil perhitungan kontrol PID yang diberikan pada register pembanding keluaran timer A (OCR1A) yang diperoleh dari persamaan
OCR1A = 40000- (output *160) (3-2) Setiap kali terjadi interupsi akan dihasilkan cuplikan sinyal pemicuan komponen IC MOC3021 selama 4 mikrodetik yang kemudian mengaktifkan komponen triac dan mengalirkan daya ke pemanas.
IV. PENGUJIAN DAN ANALISA 4.1 Pengujian Perangkat Keras
Pengujian perangkat keras dilakukan untuk mengetahui apakah perangkat keras yang telah dirancang dapat bekerja atau berfungsi dengan baik sebagaimana yang diinginkan. Pengujian yang dilakukan terhadap perangkat keras meliputi beberapa blok rangkaian perangkat keras yang telah dirancang dan juga pengujian terhadap gabungan dari beberapa blok rangkaian.
4.1.1 Pengujian Linieritas Sensor Temperatur
Pengujian linieritas sensor temperatur digunakan sebuah termometer analog untuk cairan dan voltmeter digital. Sensor temperatur LM 35DZ diberikan tegangan +12 Volt, dan bagian keluarannya dihubungkan dengan voltmeter digital. Grafik hubungan antara temperatur (hasil pengukuran termometer) dengan tegangan keluaran sensor temperatur LM 35DZ ditunjukkan pada Gambar 4.1
0 100 200 300 400 500 600 21 23 25 27 29 31 34 36 38 40 42 44 46 Temperatur(Celcius) T e g a n g a n k e lu a ra n L M 3 5 (m V )
Gambar 4.1 Grafik linieritas sensor temperatur LM 35DZ Dari grafik pada Gambar 4.1 terlihat bahwa hubungan antara temperatur terdeteksi dengan tegangan keluran sensor temperatur adalah linier. Hal ini sesuai dengan
data sheet LM 35DZ bahwa tegangan keluran sensor
bertambah sebesar 10 mV untuk setiap kenaikan temperatur 1 C.
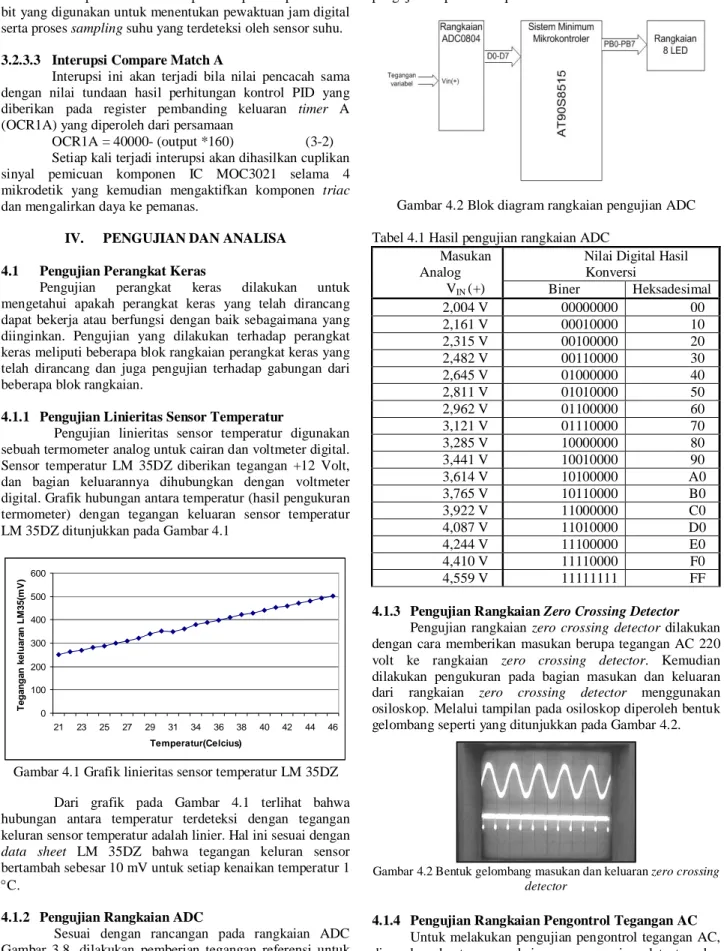
4.1.2 Pengujian Rangkaian ADC
Sesuai dengan rancangan pada rangkaian ADC Gambar 3.8, dilakukan pemberian tegangan referensi untuk ADC (VRef/2) sebesar 1,28 volt dan untuk tegangan masukan
VIN(-) diberikan sebesar 2 volt. Blok diagram rangkaian
untuk pengujian ADC ditunjukkan pada Gambar 4.2. Hasil pengujian dapat dilihat pada Tabel 4.1.
Gambar 4.2 Blok diagram rangkaian pengujian ADC Tabel 4.1 Hasil pengujian rangkaian ADC
Nilai Digital Hasil Konversi Masukan Analog VIN (+) Biner Heksadesimal 2,004 V 00000000 00 2,161 V 00010000 10 2,315 V 00100000 20 2,482 V 00110000 30 2,645 V 01000000 40 2,811 V 01010000 50 2,962 V 01100000 60 3,121 V 01110000 70 3,285 V 10000000 80 3,441 V 10010000 90 3,614 V 10100000 A0 3,765 V 10110000 B0 3,922 V 11000000 C0 4,087 V 11010000 D0 4,244 V 11100000 E0 4,410 V 11110000 F0 4,559 V 11111111 FF
4.1.3 Pengujian Rangkaian Zero Crossing Detector Pengujian rangkaian zero crossing detector dilakukan dengan cara memberikan masukan berupa tegangan AC 220 volt ke rangkaian zero crossing detector. Kemudian dilakukan pengukuran pada bagian masukan dan keluaran dari rangkaian zero crossing detector menggunakan osiloskop. Melalui tampilan pada osiloskop diperoleh bentuk gelombang seperti yang ditunjukkan pada Gambar 4.2.
Gambar 4.2 Bentuk gelombang masukan dan keluaran zero crossing
detector
4.1.4 Pengujian Rangkaian Pengontrol Tegangan AC Untuk melakukan pengujian pengontrol tegangan AC, digunakan bantuan rangkaian zero crossing detector dan sistem mikrokontroler AT90S8515. Karena sistem minimum menggunakan kristal osilator dengan frekuensi 4 MHz maka 1 siklus operasi membutuhkan waktu 0,25 µs. Pengujian
dilakukan dengan memberikan nilai antara 0 – 40000 secaara langsung pada register OCR1A yang akan memberikan tundaan maksimum 10000 µs.
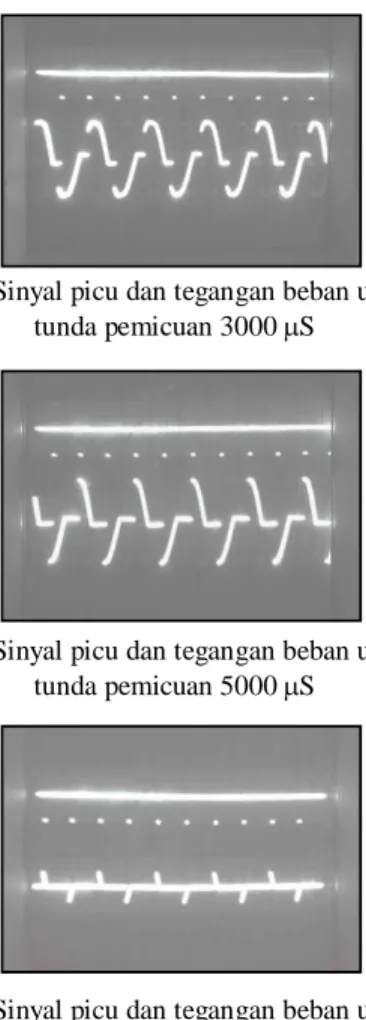
Hasil pengujian untuk lima nilai waktu tundaan pemicuan triac ditunjukkan pada Gambar 4.3 sampai Gambar 4.5.
Gambar 4.3 Sinyal picu dan tegangan beban untuk waktu tunda pemicuan 3000 S
Gambar 4.4 Sinyal picu dan tegangan beban untuk waktu tunda pemicuan 5000 S
Gambar 4.5 Sinyal picu dan tegangan beban untuk waktu tunda pemicuan 9500 S
Dari Gambar 4.3 sampai 4.5 dapat dilihat bahwa semakin besar waktu tunda untuk pemicuan triac, maka tegangan pada beban untuk setiap fasenya (fase positif dan fase negatif) akan semakin kecil yang berarti juga bahwa daya listrik yang diberikan ke beban akan semakin kecil. 4.2 Pengujian Perangkat Lunak
Pengujian perangkat lunak dilakukan untuk beberapa sub rutin program, sehingga tiap sub rutin program dapat dipastikan telah berjalan sesuai dengan kondisi yang diinginkan. Untuk sub rutin yang tidak menerima masukan dari perangkat keras, seperti sub rutin untuk algoritma control PID dan sub rutin untuk operasi aritmatik, maka pengujiannya dilakukan dengan menggunakan program simulator AVRStudio.Sedangkan untuk sub rutin yang membutuhkan masukan dari perangkat keras dan juga memberikan keluaran ke perangkat keras, maka untuk pengujiannya sistem mikrokontroler langsung dihubungkan ke perangkat keras yang bersangkutan.
4.3 Pengujian dan Analisa Respon Sistem
Pengujian ini dilakukan pada suhu awal 25.5 dengan memberikan nilai acuan 30 oC, berdasarkan pada habitat hidup ikan Kerapu yaitu antara 27 – 32 oC.
Pemberian nilai parameter Kp, Ki, dan Kd untuk memperoleh respon sistem yang optimal dilakukan dengan menggunakan metode manual (hand tuning / trial and error). Langkah-langkah penalaan yang dilakukan dapat diuraikan sebagai berikut :
1. Temperatur air akuarium dinaikkan hingga mencapai suhu 30 oC.
2. Memberikan nilai Kp hingga kontroler masih menghasilkan keluaran dan osilasi, dengan mengamati keluaran kontroler pada osiloskop.
3. Mengatur nilai Kd dan Ki untuk mengurangi osilasi keadaan tunak.
Berdasarkan hasil penalaan untuk setpoint 30 oC, diperoleh harga yang baik untuk Kp adalah 10 dan Kd = 0.3. Pemberian Kp dibawah 10 akan mengakibatkan waktu naik respon transien dari sistem menjadi lebih lama dan suhu sistem akan mengalami offset sehingga suhu akuarium tidak akan dapat mencapai suhu setpoint. Untuk nilai Kd = 0,3 suhu system akan berosilasi antara 0,2 di bawah setpoint dan 0,4 di atas setpoint, sedangkan untuk nilai Kd kurang atau lebih dari 0,3 akan menyebabkan kisaran osilasi suhu lebih besar. Pemberian nilai Ki tidak menyebabkan perubahan yang signifikan pada keluaran kontroler sehingga dapat diabaikan.
Hasil pengujiannya dalam bentuk grafik respon sistem ditunjukkan pada Gambar 4.6.
Gambar 4.6 Grafik respon sistem untuk nilai acuan = 30 C Dari grafik respon sistem yang diperoleh (Gambar 4.8), secara umum terlihat bahwa hasil pengaturannya tidak stabil secara sempurna sesuai setpoint. Respon sistem berosilasi sebesar kurang lebih 0,4C dari nilai akhirnya.
Hasil pengujian berupa grafik respon sistem terhadap gangguan pendinginan dapat dilihat pada Gambar 4.7. 0 5 10 15 20 25 30 35 40 45 50 0 100 200 300 400 500 Waktu(me nit) T e m p e ra tu r( C e lc iu s ) Suhu Setpoint
Gambar 4.7 Grafik respon sistem terhadap gangguan pendinginan untuk nilai acuan 30 oC.
Dari grafik respon sistem terhadap gangguan pendinginan terlihat bahwa sistem dapat mengatasi gangguan yang terjadi dengan waktu pemulihan yang dibutuhkan sekitar 150 menit terhitung dari pencapaian suhu terendah setelah gangguan hingga suhu sistem kembali berada pada nilai acuan. 0 5 10 15 20 25 30 35 40 45 50 0 50 100 150 200 250 Waktu(menit) T e m p e ra tu r( C e lc iu s ) Suhu Setpoint Kp = 10 Kd=0,3 Kp = 10 Kd=0,3
V. KESIMPULAN 5.1 Kesimpulan
Berdasarkan perancangan, pengujian dan analisa yang telah dilakukan dalam tugas akhir ini, maka dapat disimpulkan hal-hal sebagai berikut.
1. Sistem pengaturan temperatur yang dibuat mampu mempertahankan suhu akuarium pada suhu 30 oC, sesuai dengan kisaran suhu habitat ikan antara 27 hingga 32 oC. 2. Sistem pengaturan yang dibuat dapat bekerja dengan
baik dengan amplitudo osilasi sebesar 0,8 oC.
3. Pemerataan panas yang dihasilkan dalam akuarium sangat diperlukan untuk meningkatkan akurasi pengaturan serta mengurangi pengaruh jarak antara sensor dengan pemanas.
4. Daya pemanas yang digunakan kurang besar bila dibandingkan dengan volume air yang akan dipanaskan sehingga waktu naik respon transien sistem menjadi lama.
5.2 Saran
Beberapa hal yang dapat disarankan dari pelaksaan tugas akhir ini adalah:
1. Untuk memperoleh respon sistem yang lebih baik lagi, maka dapat dicoba dengan:
Menggunakan sensor yang memiliki keakuratan dan stabilitas yang cukup baik.
Menggunakan metode pengontrolan lain seperti
fuzzy, fuzzy hibrid,
2. Dapat dibuat program komputer untuk proses akuisisi data dari plant secara langsung pada tiap periode samplingnya, sehingga respon sistem langsung dapat diamati dalam bentuk grafik dan program untuk mengatur nilai Kp,Ki, dan Kd dan Setting Point secara
langsung dari komputer.
3. Untuk penggunaan daya pemanas yang lebih besar lagi, maka sebaiknya dibuat box/tempat yang terpisah antara kontroler dengan rangkaian pengatur tegangan pemanas
DAFTAR PUSTAKA
1. Albert Paul Malvino, Ph.D , Prinsip-Prinsip Elektronika, Penerbit Erlangga, Jakarta, 1985.
2. Albert Paul Malvino, Ph.D , Donald P. Leach, Ph.D,
Prinsip-Prinsip dan Penerapan Digital, Diterjemahkan
Oleh Ir. Irwan Wijaya, Penerbit Erlangga, Jakarta, 1992. 3. Charles A. Schuler, William L. McNamee, Industrial
Electronics and Robotics, Mc Graw Hill, New
York,1986.
4. Charles L. Philips and Royce D. Harboy, Feedback
Control System, Prentice Hall Inc, New Jersey, 1991.
5. David Halliday, Robert Resnick, Fisika, Diterjemahkan Oleh Pantur Silaban Ph.D dan Drs. Erwin Sucipto M.Sc, Penerbit Erlangga, Jakarta, 1992.
6. Edward Danakusumah, Studi Pendahuluan Budidaya
Ikan Kerapu dengan Sistem Air Deras, Makalah yang
dipresentasikan dalam Simposium Perikanan Indonesia II, Ujung Pandang, 1997.
7. Katsuhiko Ogata, Teknik Kontrol Automatik Jilid 1-2, Diterjemahkan Oleh Ir. Edi Laksono, Penerbit Erlangga, Jakarta, 1996.
8. Muhammad Rashid, Power Electronics, Circuit, Devices
and Applications, Second Edition, Prentice Hall Inc,
New Jersey, 1988.
9. P. Hogenboom, Data Sheet Book 3, Catatan Aplikasi, PT Elex Media Komputindo, Jakarta, 1996.
10. Ronald J. Tocci, Digital Systems : Principle and
Applications, Prentice Hall Inc, New Jersey, 1991.
11. Sheingold, Danield H. Transducer Interfacing Handbook
: A Guide to Analog Signal Conditioning. Analog
Devices, Inc. USA, 1980.
12. Shinkey, F.G. Process Control Systems : Application,
Design, and Tuning - 3rd Edition. McGraw-Hill Book
Co. Singapore, 1988.
13. Stuart Bennet, Real Time Computer Control, An
Introduction, Prentice Hall International, UK, 1994.
14. William David Cooper, Instrumentasi Elektronik dan
Teknik Pengukuran, Penerbit Erlangga, Jakarta, 1994.
15. William Hayt H Jr, Kemmerley Jack, Rangkaian listrik I, Diterjemahkan Oleh Silaban, Erlangga, Jakarta, 1985. 16. Zuhal, Dasar Teknik Tenaga Listrik dan Elektronika
Daya, PT. Gramedia, Jakarta, 1993.
17. ---, Pembesaran Kerapu Macan (Epinephelus Fuscogutattus) dan Kerapu Tikus (Cronileptes Altivelis) di Keramba Jaring Apung, Juknis Seri No. 7,
Departemen Kelautan dan Perikanan, Direktorat Jenderal Perikanan Budidaya, Balai Budidaya Laut, Lampung, 2001. 18. ---, www.agribussinessonline.com/ kerapu 19. ---, www.atmel.com/avr/8515 20. ---, www.barello.com/papers/index 21. ---, suharjawanasuria.tripod.com/budi_daya_dan _pengembangan_kerapu.htm
AGUNG SAIFULLOH MAJID – L2F098579
Mahasiswa Jurusan Teknik Elektro, Fakultas Teknik Universitas Diponegoro Semarang, dengan pilihan konsentrasi Kontrol.
Disetujui oleh,
Dosen Pembimbing I Dosen Pembimbing II
Ir. Agung Warsito, DHET Sumardi, ST, MT NIP. 131668485 NIP. 132125670