Vol.2 No.3 2017 70 @2017 kitektro
Rancang Bangun Prototipe Perahu Pembersih Tambak dengan Kendali Jarak Jauh Menggunakan
Smartphone
Ibnu Gibran Syafiansyah#1, Zulhelmi*2, Mohd. Syaryadhi#3
# Jurusan Teknik Elektro dan Komputer, Fakultas Teknik Universitas Syiah Kuala Jl. Tgk. Syech Abdul Rauf No. 7, Darussalam, Banda Aceh 23111 Indonesia
Abstrak— Kebersihan tambak merupakan faktor penting dalam meningkatkan produktifitas usaha budidaya perikanan.
Sampah organik dan non-organik pada dasarnya mempengaruhi tingkat kesehatan ikan, udang, dan makhluk air lainnya. Kebersihan air merupakan faktor penting dalam peningkatan produktifitas usaha budidaya perikanan seperti tambak. Salah satu cara menjaga kebersihan tambak adalah melakukan pembersihan secara rutin. Pada umumnya, sampah-sampah tersebut akan diambil dan disingkirkan.
Keterlibatan manusia secara langsung sangat dibutuhkan karena harus menelusuri perairan dengan menggunakan perahu. Hal tersebut dapat memakan waktu dan tenaga lebih.
Untuk itu, dibutuhkan sebuah alat yang dapat dikendalikan dan dirancang untuk membersihkan sampah tambak yang mengapung. Tujuan penelitian ini adalah merancang dan membangun sebuah prototipe yang dapat dikendalikan menggunakan smartphone melalui jaringan bluetooth untuk membersihkan sampah. Prototipe ini mempunyai berat 12.58 kg dengan volume penampung sampah sebesar 0.12 m3 panjang alas 65 cm, lebar alas 74 cm dan tinggi 50 cm dan menggunakan pipa sebagai pelampung dari penampung sampah di sisi kiri dan kanan. Prototipe ini menggunakan sebuah arduino uno r3 sebagai mikrokontroler yang terhubung melalui bluetooth ke smartphone. Sebagai penggerak perahu, digunakan dua buah motor DC pada sisi kanan dan sisi kiri perahu. Bluetooth akan menerima data perintah berupa char F, L, R, dan S. Kemudian data char yang diterima tersebut diolah pada arduino sehingga menghasilkan output yang berfungsi sebagai penggerak perahu.
Kata Kunci
—
remote, module bluetooth, arduino, smartphone, motor listrik.I. PENDAHULUAN
Sampah merupakan salah satu permasalahan yang dihadapi setiap negara. Kota-kota besar bahkan ibukota negara dari seluruh pelosok Negara mengalami persoalan yang sama, yaitu penanganan sampah. Sistem pengumpulan yang tidak tuntas,karena kurangnya alat teknologi angkut sampah ataupun pembersih sampah, kurangnya fasilitas- fasilitas pendukung dan terbatasnya kapasitas pengelolahan akhir [1].
Sampah diperairan lebih sulit dibersihkan, apalagi penanganannya pada saat ini dengan menggunakan perahu dan dilakukan secara manual. Proses tersebut membutuhkan campur tangan manusia secara langsung untuk memungut sampah, hal tersebut sangat tidak praktis dan tidak efisien.
Untuk itu diperlukan peralatan pembersih (perahu) yang dapat dikendalikan dengan jarak tententu sehingga tidak dibutuhkan campur tangan manusia manusia untuk terjun langsung ke lapangan(perairan) dan melakukan pembersihan.
Sehingga perlu dirancang dan membangun prototipe perahu pembersih sampah perairan tenang yang dapat dikendalikan dengan aplikasi android melalui jaringan bluetooth secara jarak jauh. Menguji dan menganalisa performansi perahu pembersih dalam melakukan tugasnya, dan menganalisa kemampuan jarak komunikasi antara perahu dan smatphone. Alat ini dapat menjadi salah satu metode untuk menyelesaikan masalah kebersihan lingkungan perairan.
II. DASAR TEORI A. Perahu
Perahu adalah kendaraan air dari berbagai ukuran yang dirancang untuk mengapung atau mengambang, digunakan untuk melakukan perjalanan di atas air. Perahu kecil biasanya ditemukan di danau atau di wilayah pesisir dan banyak juga ditemukan di sungai.
Perahu memiliki beberapa jenis bentuk lambung, salah satunya perahu multi lambung atau dengan kata lain disebut dengan katamaran (lambung ganda). Lambung perahu adalah badan dari perahu atau kapal. Lambung perahu menyediakan daya apung yang mencegah kapal dari tenggelam [2].
B. Motor DC Magnet Permanen
Motor dc (direct current) adalah salah satu mesin elektrik yang mengubah tegangan searah (dc) menjadi tenaga mekanik. Salah satu jenis motor dc yang paling umum digunakan adalah jenis sikat (brushed). Motor dc jenis sikat menghasilkan torsi langsung dari tegangan dc melalui komutator internal, magnet statis, dan magnet berputar.
Kekurangan dari jenis sikat adalah dari segi perawatan
Vol.2 No.3 2017 71 @2017 kitektro menggantikan sikat karbon [3]. Rumus umum menghitung
daya untuk motor dc yaitu :
(1) Dimana P merupakan daya yang dihasilkan, V merupakan tegangan (volt), I adalah kuat arus (ampere).
Torsi yaitu tenaga yang diperlukan untuk memindahkan benda dari posisi diam hingga berpindah pada jarak tertentu.
Hubungan antara kecepatan dan torsi berbanding terbalik, artinya semakin cepat mesin bergerak maka semakin sedikit torsi yang dibutuhkan. Untuk menghitung torsi maksimum dari motor dc didapat dari persamaan berikut [4]:
(2) Dimana T merupakan torsi (Nm), P merupakan daya (W) dan n merupakan kecepatan sudut motor (angular speed).
C. Baterai (AKI)
Baterai (aki) atau biasa disebut accu adalah sebuah sel listrik dimana di dalamnya berlangsung proses elektrokimia yang dapat berbalikan dengan efisiensinya yang tinggi.
proses elektrokimia reversibel adalah di dalam baterai dapat berlangsung proses pengubahan kimia menjadi tenaga listrik (proses pengosongan), sebaliknya dari tenaga listrik menjadi tenaga kimia. pengisian kembali dengan cara regenerasi dari elektroda-elektroda yang dipakai, yaitu dengan melewatkan arus listrik dalam arah (polaritas) yang berlawanan [5].
Lama ketahanan baterai ditentukan oleh besarnya kapasitas kuat arus baterai dan berapa daya beban. Rumus dasarnya meliputi :
(3)
Dimana i adalah kuat arus (a), p merupakan daya (watt) dari beban, v merupakan tegangan (volt) dan dieffisiensi baterai sebesar 20% [5].
D. Komunikasi Bluetooth
Bluetooth merupakan alat media komunikasi yang dapat digunakan untuk menghubungkan sebuah perangkat komunikasi dengan perangkat komunikasi lainnya.
Bluetooth beroperasi pada pita frekuensi 2.4 MHz dengan menggunakan frequency hopping transceiver yang mampu menyediakan layanan komunikasi data secara realtime dengan jarak yang pendek. Bluetooth menggunakan standar frekuensi radio IEEE 802.11 dengan layanan jarak dan kecepatan yang lebih kecil dari Wireless Local Arean Network (WLAN). Bluetooth menggunakan modulasi GFSK (Gaussian Frequency Shift Keying) untuk berkomunikasi data. Gambar 2.4 memperlihatkan module bluetooth seri HC06 yang merupakan perangkat transceiver bluetooth [6].
E. Arduino Uno
Berdasarkan perkembangan alat terdapat suatu sistem mikrokontroler yang terbaru yaitu Arduino UNO yang bisa dimanfaatkan sebagai pengontrol. Arduino UNO merupakan board mikrokontroler yang bersifat open source yang mempunyai 14 pin digital input/output (6 di antaranya dapat digunakan sebagai output PWM), 6 input analog, sebuah osilator Kristal 16 MHz, sebuah koneksi USB, sebuah power jack, sebuah ICSP header, dan sebuat tombol reset. Arduino UNO memuat semua yang dibutuhkan untuk menunjang mikrokontroler, mudah mengkoneksikannya ke sebuah komputer dengan kabel USB atau mensuplainya dengan sebuah adaptor AC ke DC atau menggunakan baterai.
Kelebihan Arduino salah satunya adalah sangat mudah digunakan karena tidak perlu perangkat chip programmer.
Dalam pengoperasiannya, Arduino menggunakan slot USB, sehingga proses upload program sangat mudah karena sudah ada bootloader. Selain itu, paket Arduino juga menawarkan shield siap pakai, yaitu shield GPS, Ethernet, SD Card, dll [7].
F. IDE (Integrated Development Environment)
Untuk membangun sebuah program, maka dibutuhkan suatu software yang disebut IDE. Pada Arduino, software IDE yang ditawarkan bernama Arduino Software. Arduino Software bekerja dengan cara meng-upload file yang akan dieksekusi pada mikrokontroler ATMega 328. File ini memiliki format hex dengan header mirip bahasa C.
G. Xamarin Platform
Platform Xamarin memungkinkan pengembang yang menggunakan bahasa C# untuk membuat aplikasi mobile untuk Android dan iOS. Xamarin menawarkan IDE (Integrated Development Environtment) yaitu Xamarin Studio dan tersedia dalam bentuk add-ins Visual Studio.
Dengan add-ins tersebut maka pengembang C# dapat menggunakan Visual Studio untuk mengembangkan, menghasilkan, dan mendebug aplikasi Android dan iOS.
Dengan Xamarin, kode program yang sebelumnya ditulis dengan C# dapat digunakan kembali untuk mengembangkan aplikasi mobile [8].
H. Relay
Relay adalah saklar elektronik yang dapat dioperasikan sebagai pembuka dan penutup rangkaian yang bisa dihubungkan ke arduino. Relay terdiri atas umparan, pegas, saklar dan 2 buah kontak elektronik (normally close dan normally open).
Normally Close (NC): yaitu kondisi dimana saklar dalam kondisi terbuka.
Normally Open (NO): yaitu kondisi dimana saklar dalam kondisi tertutup.
Prinsip kerja relay pada dasarnya bekerja karena adanya medan magnet yang digunakan untuk menggerakkan saklar.
Kumparan akan diberikan tegangan kerja relay yang akan menimbulkan medan magnet pada kumparan yang
Vol.2 No.3 2017 72 @2017 kitektro disebabkan oleh arus yang mengalir pada lilitan kawat.
Relay yang digunakan pada penelitian ini adalah relay 2 channel.
III. METODOLOGI PENELITIAN A. Metode penelitian
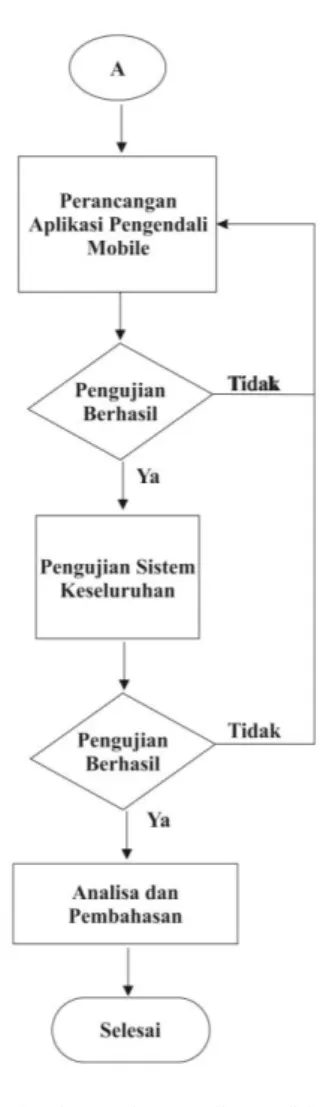
Tahapan – tahapan penelitian yang telah dilakukan adalah sebagai berikut :
Gambar 1 Diagram alir penelitian
B. Perancangan Platform Penggerak
Bagian ini menjelaskan tahap-tahap perancangan yang dilakukan dalam penelitian.
1) Perancangan Perahu Pengangkut Sampah:
Perancangan perahu pengangkut sampah ini dilakukan dimana rangkaian driver motor dc, baterai dan motor dc seperti yang diperlihatkan pada Gambar 2.
Gambar 2 Ilustrasi perancangan perahu
Vol.2 No.3 2017 73 @2017 kitektro 2) Perancangan Kerangka Penampung Sampah Pada
Perahu: Perancangan kerangka penampung sampah pada perahu berfungsi sebagai penahan sampah yang berhasil diangkut menggunakan perahu. Bahan yang digunakan sebagai kerangka penampung sampah adalah besi beton diameter 6 mm. Gambar 9 memperlihatkan perancangan kerangka penampung sampah.
Gambar 3 Hasil perancangan awal kerangka perahu Rancangan perahu tersebut memiliki dua buah lambung.
Penyaring sampah diletakkan antara lambung kanan dan lambung kiri. Sampah yang terjaring akan terperangkap diantara dua lambung. Lambung kiri perahu terdiri dari mikrokontroler sebagai prosesor dan modul bluetooth sebagai perangkat komunikasi antar aplikasi android dan perahu, baterai sebagai sumber tegangan utama, dan motor dc sebagai penggerak baling-baling. Lambung kanan perahu terdiri dari rangkaian driver motor dc, baterai dan motor dc.
3) Rangkaian Driver Motor DC: Rangkaian driver motor dc digunakan sebagai pengendali motor dc penggerak baling-baling sehingga perahu dapat maju, belok kanan dan belok kiri. . Rangkaian driver motor dc digunakan untuk menjembatani masukan tegangan dari mikrokontroler (low side) dengan keluaran tegangan 12 Volt yang menggerakkan motor dc (high side)
Input dari ardunio terdiri dari 2 input berupa logika digital yang mewakili status nyala atau padamnya motor dc pada perahu. Driver motor dc menerima input logika digital dari mikrokontroler dan mengendalikan motor dc pada perahu.
Input 1 merupakan logika untuk mengendalikan motor kanan dan input 2 merupakan logika untuk mengendalikan motor dc kiri.
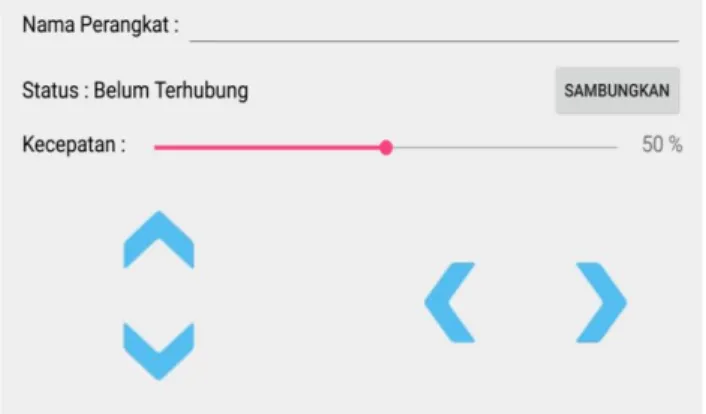
C. Perancangan Aplikasi Pengendali Perahu
Aplikasi yang dirancang memiliki 3 tombol pengendali yaitu tombol “Kiri”, tombol “Kanan”, dan tombol “Maju”.
Perancangan aplikasi android menggunakan software Visual Studio yang telah diintegrasikan dengan platform Xamarin.
Gambar 4 Ilustrasi aplikasi pengontrol perahu D. Komunikasi Bluetooth Smartphone Dengan Perahu
Pengendalian motor pada perahu menggunakan komunikasi bluetooth antara smartphone dengan mikrokontroler melalui module bluetooth HC06. Interaksi user berupa maju, berhenti, belok kanan, belok kiri diterjemahkan menjadi kode data dengan format yang diperlihatkan pada Tabel 3.5. Angka 1 pada kolom kolom interaksi user menyatakan tombol pada aplikasi ditekan, dan angka 0 menyatakan tombol pada aplikasi tidak ditekan oleh user.
TABEL I
FORMAT DATA UNTUK PENGENDALIAN PERAHU DENGAN APLIKASI SMARTPHONE
No
Interaksi User
ASCII Maju Berhenti Belok
Kanan
Belok Kiri
1 1 0 0 0 F
2 0 1 0 0 S
3 1 0 1 0 R
4 0 0 0 1 L
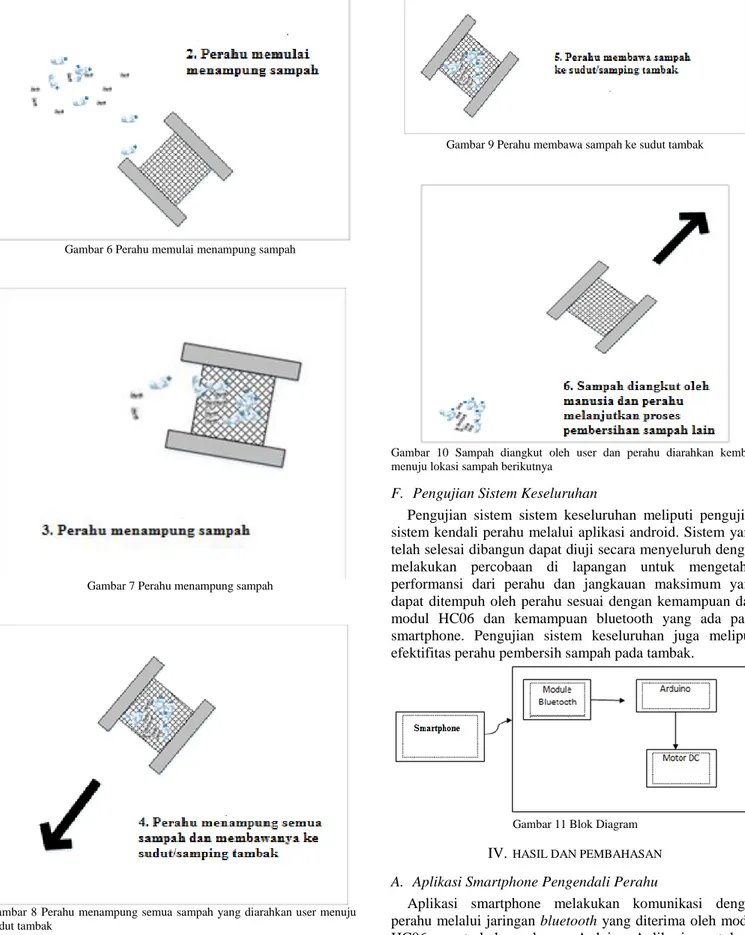
E. Metode Pembersihan Tambah Dengan Perahu
Bagian ini menjelaskan metode pembersihan sampah terapung pada tambak menggunakan perahu yang dikontrol menggunakan aplikasi samrtphone.
Gambar 5 perahu dikendalikan user menuju lokasi sampah
Vol.2 No.3 2017 74 @2017 kitektro Gambar 6 Perahu memulai menampung sampah
Gambar 7 Perahu menampung sampah
Gambar 8 Perahu menampung semua sampah yang diarahkan user menuju sudut tambak
Gambar 9 Perahu membawa sampah ke sudut tambak
Gambar 10 Sampah diangkut oleh user dan perahu diarahkan kembali menuju lokasi sampah berikutnya
F. Pengujian Sistem Keseluruhan
Pengujian sistem sistem keseluruhan meliputi pengujian sistem kendali perahu melalui aplikasi android. Sistem yang telah selesai dibangun dapat diuji secara menyeluruh dengan melakukan percobaan di lapangan untuk mengetahui performansi dari perahu dan jangkauan maksimum yang dapat ditempuh oleh perahu sesuai dengan kemampuan dari modul HC06 dan kemampuan bluetooth yang ada pada smartphone. Pengujian sistem keseluruhan juga meliputi efektifitas perahu pembersih sampah pada tambak.
Gambar 11 Blok Diagram
IV. HASIL DAN PEMBAHASAN A. Aplikasi Smartphone Pengendali Perahu
Aplikasi smartphone melakukan komunikasi dengan perahu melalui jaringan bluetooth yang diterima oleh modul HC06 yang terhubung dengan Arduino. Aplikasi smartphone ini bertugas untuk menerjemahkan perintah dari user berupa
Vol.2 No.3 2017 75 @2017 kitektro maju, berhenti, belok kiri dan belok kanan. Perintah dari user
kemudian dikirim ke modul HC06 pada perahu dan diterjemahkan menjadi perintah untuk menghidupkan motor kiri atau kanan perahu.
1) Pengujian Aplikasi Smartphone Dengan Modul Bluetooth: Pengujian aplikasi smartphone dengan modul bluetooth ini dilakukan untuk mengetahui apakah modul bluetooth HC-06 ini dapat berkomunikasi dengan aplikasi smartphone. Pengujian ini dilakukan dengan memberikan power 5V pada modul bluetooth yang kemudian di pairing oleh smartphone dengan memindai bluetooth.
Setelah android selesai melakukan pairing pada bagian available device terdapat device yang terdeteksi oleh android yaitu modul bluetooth HC-06 (itead) yang saya gunakan pada prototipe perahu pembersih sampah. Kemudian muncul kotak dialog bluetooth pairing request yang meminta PIN (default 1234) untuk pairing ke android.
2) Pengujian Jarak Bluetooth: Pengujian jarak bluetooth ini dilakukan dengan cara mengirimkan data dari bluetooth android ke modul bluetooth HC-06 dengan mengatur jarak posisi antara prototipe perahu dengan android. Pengujian ini dilakukan di area terbuka tanpa ada penghalang. Hasil pengujian yang didapat yaitu prototipe perahu berhasil mengikuti perintah yang diberikan dari aplikasi android berupa perintah maju, berhenti, balik kanan dan balik kiri dalam jarak yang tidak lebih dari 10 meter.
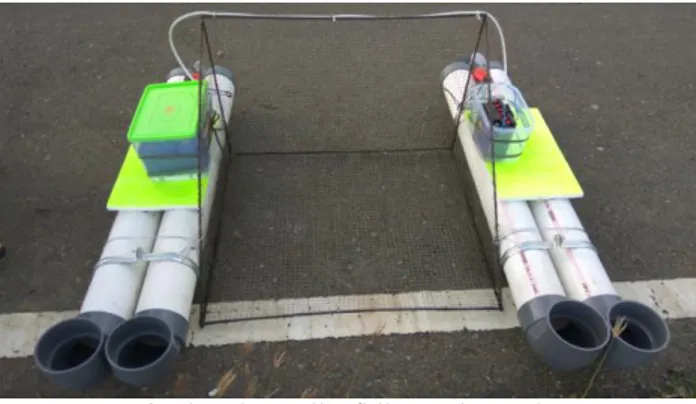
B. Platform Penggerak Perahu
Platform penggerak terdiri dari arduino, relay, baterai, motor dc dan propeller yang diletakkan di atas dua lambung.
Tampak dari depan, lambung kiri terdiri dari baterai sebagai sumber daya untuk menghidupkan arduino, relay dan motor dc sehingga propeller dapat bergerak untuk mendorong perahu. Sedangkan lambung kanan terdiri dari baterai sebagai sumber daya untuk menghidupkan motor dc di lambung kanan, sehingga propeller dapat bergerak untuk mendorong perahu.
Gambar 12 Tampilan fisik prototipe perahu
Prototipe perahu pembersih sampah ini mempunyai panjang alas 0,65 meter, lebar alas 0,74 meter dan tinggi 0.5
meter. Tempat penampungan sampah mempunyai volume sebesar 0.12 m3. Prototipe perahu pembersih sampah ini hanya bisa mengangkut sampah yang mengapung di permukaan air seperti sampah plastik, botol plastik, dan dedaunan. Prototipe perahu ini tidak dapat membawa sampah dalam ukuran besar dan berat.
C. Pengujian Prototipe Perahu Pembersih Sampah Tambak
1) Pengujian Prototipe Perahu Tanpa Beban:
Pengujian prototipe perahu pembersih sampah tambak ini dilakukan di kawasan lamdingin. Pengujian ini dilakukan tanpa memberikan beban terhadap prototipe. Dari hasil pengujian di tambak, prototipe perahu dapat bergerak maju sejauh 9.6 m dalam waktu 60 detik.
Berdasarkan data di atas dapat dihitung kecepatan prototipe perahu pembersih sampah tambak menggunakan persamaan berikut ini :
2) Pengujian Prototipe Perahu Dengan Beban: Pada tahap ini dilakukan pengujian prototipe perahu yang diberikan beban. Pengujian ini dilakukan sebanyak 4 kali percobaan dengan berat beban yang berbeda-beda. Pengujian prototipe perahu tersebut dijalankan selama 60 detik setiap beban sesuai dengan program yang di unduh pada arduino.
TABEL II
PENGUJIAN PROTOTIPE PERAHU DENGAN BEBAN No Beban
(kg)
Waktu (s)
Jarak (m) Kecepatan Perahu (m/s)
1 0.5 60 9.2 0.153
2 1.5 60 8.8 0.146
3 3 60 8.1 0.135
4 5 60 7.5 0.125
V. KESIMPULAN
Sistem prototipe ini dirancang dengan menggunakan Arduino Uno R3 sebagai pemroses data dari modul bluetooth ke relay, relay dapat berfungsi sebagai saklar untuk menghidupkan dan mematikan motor. Motor dapat berfungsi untuk menggerakkan propeller dan baterai dapat digunakan untuk menyuplai daya ke komponen-komponen pada sistem.
Vol.2 No.3 2017 76 @2017 kitektro Prototipe perahu pembersih sampah ini dapat mengangkut
sampah 5 kg dengan volume tempat penampung sampah sebesar 0.12 m3 panjang alas 65 cm, lebar alas 74 cm dan tinggi 50 cm. Prototipe ini menggunakan pipa sebagai pelampung dari penampung sampah di sisi kiri dan kanan.
Prototipe perahu pembersih sampah ini dapat dikenadilkan dengan smartphone melalui jaringan bluetooth dan dapat terhubung hingga radius 10 m. Dari hasil pengujian dapat disimpulkan semakin berat beban maka
kecepatan perahu semakin berkurang sehingga jarak tempuhnya juga ikut berkurang.
UCAPAN TERIMA KASIH
Secara khusus penulis mengucapkan terima kasih kepada Bapak Zulhelmi, S.T., M.Sc selaku pembimbing I, dan Bapak Mohd. Syaryadhi, S.T., M.Sc selaku pembimbing II yang telah membimbing penulis dalam penulisan karya ilmiah ini.
REFERENSI
[1] F. Fitriyani, ”Kapal Pengangkut Sampah”, Jakarta, http://wartakota.tribunnews.com/2014/03/12 , 2014
[2] Sumaryanto, “Konsep Dasar Kapal”, Jakarta, Kementerian Pendidikan & Kebudayaan, 2013
[3] D. Frank, “Electric Motor and Control System”, New York, McGraw-Hill, 2010
[4] Dahmir Dahlan, “Elemen Mesin”, Jakarta, Harta Prima, 2012
[5] Nia Nuraini, “Fungsi dan Konstruksi Baterai Aki”, Fakultas Keguruan dan Ilmu PendidikanUniversitas 10 November 2016 [6] T. Kevin, “Getting Started with Bluetooth Low Energy, USA,
O’Reilly, 2014 [7] Farnell,ArduinoUno,
(http://www.farnell.com/grh/?mpn=A000066%20ARDUINO&cmp=
os_pdf-datasheet, diakses tanggal 10 November 2016)
[8] R. Mark, Xamarin Mobile Application Development For Android”, Birmingham, 2014