IMPLEMENTASI KONTROLER PID PADA PLC UNTUK PENGATURAN KECEPATAN MOTOR DC
Josaphat Pramudijanto dan Handy Wicaksono
Jurusan Teknik Elektro FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Surabaya 60111, Indonesia.
Email: [email protected], [email protected]
Abstrak:
Kontroler PID merupakan kontroler yang sampai sekarang masih banyak digunakan di dunia industri. Hal yang krusial pada disain kontroler PID ini ialah menentukan parameter kontroler atau tuning. Karena sangat banyak metode tuning yang telah dikembang kan maka perlu ditetapkan metode terbaik yang memenuhi kriteria performansi yang kita inginkan dan masih ada dalam jangkauan keterbatasan plant.
PLC merupakan perangkat kontrol yang sering digunakan pada kontrol sekuensial, bisa melakukan algoritma kontrol PID pada salah satu sekuennya.
Algoritma PID dituliskan dalam bahasa basic dimasukkan pada modul ASCII. Dengan mengin tegrasikan PLC sebagai kontroler dan motor DC sebagai plant, kita dapat menganalisa metode–metode tuning yang diterapkan ke pengaturan kecepatan motor DC.
Kata kunci : kontroler PID, PLC.
1. PENDAHULUAN
Kontroler PID adalah kontroler berumpanbalik yang paling populer di dunia industri karena memberikan performa kontrol yang baik meski mempunyai algoritma sederhana yang mudah dipahami [Willis, 1999]. Hal krusial dalam desain kontroler PID ialah tuning kontroler.
Pada tahun 1942, Ziegler-Nichols mengembangkan metode kurva reaksi yaitu tuning berdasar respon open loop sistem. Selain itu juga dikembangkan metode osilasi (close loop tuning) yang bisa menangani plan yang mengandung integrator (tidak stabil). Setelah itu pada tahun 1967 dikembangkan metode tuning yang bertujuan meminimasi nilai integral kesalahan [Smith dan Corripio, 1997].
Kemudian muncul metode tuning yang berdasar model plan. Metode pertama ialah Direct Synthesis yang memerlukan model plan sebenarnya dan model plan yang diinginkan untuk mendapatkan parameter P, I, D dari kontroler. Metode berikutnya yang hampir sama ialah Internal Model Control yang dikembangkan oleh Garcia dan Morrari pada tahun 1982. [Ray dan Oguinnake, 1994].
Sementara itu Programmable Logic Controller (PLC) sebagai alat pengatur urutan proses secara digital, salah satunya dengan memanfaatkan modul ASCII yang bisa mengadaptasi pemrograman dalam bahasa BASIC [Omron, 1988].
Penggunaan modul ASCII sebagai media belajar di dunia pendidikan masih sangat sedikit. Hutomo [Hutomo, 1995] mencoba mengaplikasikan algoritma fuzzy pada modul ASCII PLC 200H. Sementara pemahaman
penggunaan kontroler PID memerlukan penanganan yang serius. Karena itu, pada penelitian kali ini dicoba untuk mengimplementasikan kontroler PID pada modul ASCII untuk mengatur kecepatan motor DC. Meskipun implementasi kontroler PID dengan tuning tertentu telah dicoba oleh Chairuzzani [Chairuzzani dkk., 1998] dengan hasil kurang memuaskan.
2. KONTROLER 2.1 Kontroler PID
Kontroler merupakan salah satu komponen sistem yang berfungsi mengolah sinyal umpan balik dan sinyal referensi menjadi sinyal kontrol sedemikian rupa sehingga performansi sistem yang dikendalikannya sesuai dengan spesifikasi performansi yang diinginkan. Tipe kontroler paling populer ialah kontroler PID. Elemen-elemen kontroler P, I dan D masing-masing secara keseluruhan bertujuan untuk mempercepat reaksi sebuah sistem, menghilangkan offset dan menghasilkan perubahan awal yang besar.
Persamaan kontroler PID dalam bentuk Laplace : )) ( )
1 ( ) ( ( )
( E s T sE s
s s T E K s
M D
I
C + +
= (2.1)
2.2 Tuning Kontroler dengan Pendekatan Model Plan Aspek yang sangat penting dalam desain kontroler PID ialah tuning kontroler. Ziegler Nichols [Muhidin, 1999]
mengembangkan metode kurva reaksi pada plan dengan sistem lup terbuka dan hasil penalan parameter seperti tabel berikut:.
Tabel 2.1 Paramater PID dengan metode kurva reaksi Tipe Kontroler Kp Ti Td
P T/L ~ 0
PI 0,9 T/L L/0,3 0 PID 1,2 T/L 2L 0,5L
Sedang tuning parameter PID dengan metode osilasi pada sistem lup tertutup didapatkan seperti tabel berikut:
Tabel 2.2 Paramater PID dengan metode osilasi Tipe Kontroler Kp Ti Td
P 0,5 Ku
PI 0,45 Ku 1/2 Pu
PID 0,6 Ku 0,5 Pu 0,125 Pu
Selain itu, metode lain yang hampir serupa dengan kurva reaksi ialah metode Cohen Coon [Ray dan Oguinnake, 1994] yang tampak pada tabel berikut :.
Tabel 2.3 Paramater PID dengan metode Cohen-Coon
Kontroler Kc Ti Td
P
+
T L L T
K 3
1 1
1 - -
PI
+
L T L
T
K 12
9 1 ,
1 0 ( )
+
+ ) ( 20 9
3 30
TL TL
L -
PID
+
T L L
T
K 4
1 3 4
1 ( )
+ +
) ( 8 13
6 32
TL T L
L
+2( ) 11
4
T
L L
Ogunnaike dan Ray [Ogunnaike dan Ray, 1994]
mengemukakan metode tuning kontroler dengan metode direct sinthesys yang mempunyai 3 variasi, yaitu:
• Smith Predictor PI Controller )
( . r Kc K
τ
= τ ;
τ
1= τ
(2.2)• Kontroler PID komersial )
( a
K K
r
c= +
τ
τ ; τI =τ; 2
τD=α (2.3)
• Kontroler PID ideal
) (
2α τ τ α
+
= +
r
c K
K ;
2 τ α τI = + ;
2 2
α α
τ τ τ
= +
d (2.4)
Garcia dan Morrari pada tahun 1982 [Ogunnaike dan Ray, 1994], mengembangkan metode Internal Model Control, dengan tuning parameter sebagai berikut::
) ( 2
2 α λ
α τ
+
= +
Kc K ;
2 τ α τI = + ;
α τ τ τα
= +
D 2 (2.5)
di mana nilai α
λ > 0,25.
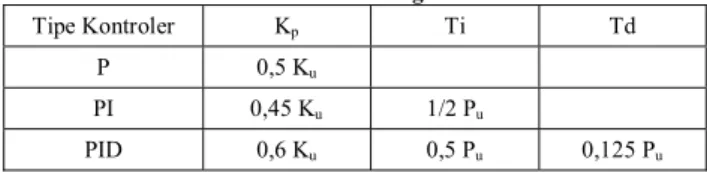
2.3 Tuning Kontroler dengan Optimasi dari Time- Integral Criteria
Tuning yang dilakukan bertujuan untuk meminimasi integral error.
Tabel 2.4 Parameter kontroler model pendekatan ITAE Kon -
troler Tipe Res- Pon
Kc Ti Td
PID PID
Set Point Distur bance
855 ,
965 0
,
0
α τ K
947 ,
357 0
.
1
α τ K
] 147 , 0 796 , 0
[
− τ α τ
738 , 0
842 ,
0
τ α τ
929 , 0
308 ,
0
τ τ α
995 , 0
381 ,
0
τ τ α
3. PERANCANGAN MODEL 3.1 Perencanaan perangkat keras
Keperluan perangkat keras untuk penelitian ini meliputi: modul ASCII (C200H-ASC02), modul DA (C200H-DA001), dan modul digital input (C200H-IM212).
Modul-modul tersebut merupakan modul pada PLC yang berfungsi sebagai kontroler pada konfigurasi sistem
pengaturan kecepatan. Hubungan secara lengkap perangkat yang dipergunakan untuk penelitian ini bisa dilihat pada gambar berikut:
Gambar 3.1 Rangkaian untuk penelitian
3.2 Perencanaan Perangkat Lunak
Perencanaan perangkat lunak dilakukan dengan menyusun algoritma yang direalisasikan kedalam bahasa Basic, dan dimasukkan ke modul ASCII. Model kontroler digital yang digunakan mengacu pada implementasi yang dilakukan oleh Bennet [Bennet, 1988] dengan ketentuan sebagai berikut:
• Persamaan kontroler PID digital :
+ + ∆
∆
= −
∑
=
− n
k k i n n n d c
n e t
e T t e T e K m
0
1) 1 .
( (3.1)
• Penggunaan Sampling time: 0,02 detik.
• Penambahan konstanta manipulated variable (MV) saat steady state supaya tidak terjadi keadaan sinyal kontrol =0 saat error =0. MV yang diberikan = 3,5 V.
• Mengatasi integral windup atau integral saturation dengan membatasi besarnya komponen integral atau sinyal kontrol yaitu antara 2,5 – 8 V.
3.3 Implementasi Tuning Kontroler PID
Dengan hasil pengukuran model plan dan memasukkan nilai–nilai parameter kontroler PID berdasar macam–macam metode tuning yang telah dijelaskan sebelumnya, berikut dapat dilihat hasil perhitungan parameter kontroler PID.
Tabel 3.1 Parameter kontrol PID berdasar metode tuning
No Metode Kp Ti Td
1 Ziegler Nichols :
Kurva Reaksi 34,371 0,112 0,028 2 Ziegler Nichols :
Osilasi 4,200 0,168 0,042 3 Cohen – Coon :
Kurva Reaksi 45,382 0,131 0,020 4 ITAE : Set Point
Changing 20,058 2,028 0,022
5 ITAE : Disturbance Input 38,413 0,160 0,022
PLC C200H
ASC 02
IM 212
DA
001 DRIVER
MOTOR DC
TACHO METER AMPLI ADC
FIER
PCL 712
Pengukuran data PC 1
PC 2 Programming
Console
No Metode Kp Ti Td 6 Direct Sinthesys :
PI Smith Predictor 1,894 1,604 -
7 Direct Sinthesys :
Commercial Controller 1,794 1,604 0,028
8 Direct Sinthesys :
Ideal Controller 1,826 1,632 0,028
9 Internal Model Control 1,826 1,632 0,028
4. HASIL PENGUKURAN DAN ANALISA 4.1 Percobaan Test I
Percobaan ini dilakukan dengan memberikan perubahan set point pada plan yang telah running dan steady. Dari hasil percobaan test I ini metode–metode berikut:
• Metode Ziegler Nichols : Kurva Reaksi
• Metode Ziegler Nichols : Osilasi
• Metode Cohen – Coon
• Metode ITAE – Set Point
• Metode ITAE – Disturbance
terbukti memberikan respon yang buruk (terjadi osilasi terus menerus). Hal ini dikarenakan rasio L/T plan yang tidak memenuhi syarat seperti yang disampaikan oleh Ogunnaike [Ogunnaike & Ray, 1994] dan Smith. [Smith & Corripio, 1997].
Sedang keempat metode yang termasuk Model Based Controller menunjukkan hasil yang cukup bagus, dan dapat dilihat pada tabel berikut.
Tabel 4.1 Hasil Percobaan Test I
No Metode Akurat*
Error SS.
(V)
Maximum Overshoot
(%)
Rise Time (det.)
Settling Time
(det.) 1 Tanpa
kontroler Tidak 1,106 - 0,54 1,26 2 Smith
Predictor Ya 0,144 3,9
(0,156 V) 0,54 0,9 3 Commercial
Controller Ya 0,144 3,9
(0,156 V) 0,72 1,26
4 Ideal Controller Ya 0,144 - 0,36 0,54
5 IMC
Controller Ya 0,144 - 0,36 0,54
* Akurat : berada dalam pita akurasi 5 %
Kontroler PID memberikan perbaikan yang signifikan pada plan tanpa kontroler, error steady state yang besar menjadi nyaris 0. Hasil keseluruhan yang diberikan nyaris sama. Jika dibanding simulasi, respon sistem masih mengandung error steady state.
4. 2 Percobaan Test II
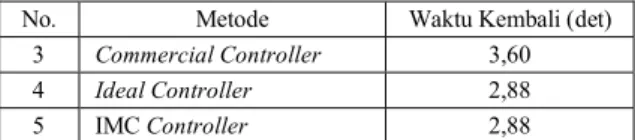
Percobaan ke dua ini dilakukan dengan memberikan disturbance pada plan yang telah running dan steady. Berikut ini tabel hasil pengukuran percobaan test II.
Tabel 4.2 Hasil Percobaan Test II
No. Metode Waktu Kembali (det) 1 Tanpa kontroler - 2 Smith Predictor Controller 2,52
No. Metode Waktu Kembali (det)
3 Commercial Controller 3,60
4 Ideal Controller 2,88
5 IMC Controller 2,88
Pemberian kontroler PID menghasilkan waktu kembali kurang dari 3,6 detik.. Kontroler Smith Predictor memberikan hasil yang sedikit lebih baik.
5. KESIMPULAN
Dari hasil percobaan yang dilakukan pada penelitian ini dapat disimpulkan bahwa :
1. Implementasi kontroler PID pada modul ASCII- PLC C200H untuk mengatur kecepatan motor DC dapat dilakukan dengan beberapa pendekatan berikut :
• Penggunaan persamaan kontroler PID digital.
• Menggunakan sampling time 0,02 detik.
• Memberikan konstanta untuk keadaan zero error (MV=3,5 V).
• Memberi batas saturasi motor (2,5 V – 8 V) 2. Metode tuning kontroler yang dapat dipakai untuk
pengaturan kecepatan motor DC yaitu :
• Metode Direct Sinthesys : Smith Predictor
• Metode Direct Sinthesys : Commercial Con.
• Metode Direct Sinthesys : Ideal Controller
• Metode Internal Model Controller
Yang mampu menghasilkan respon akurat, error steady state dan maximum overshoot relatif kecil (di bawah 5 %), dan rise time - settling time relatif cepat (di bawah 0,72 detik dan 1,26 detik).
3. Untuk penggunaan kontroler lewat komputer, metode Direct Sinthesys : Ideal Controller memiliki pendekatan model yang paling ideal dan kriteria performansi yang cukup baik (memberi akurasi, error steady state : 0,144 detik, maximum overshoot : 0, rise time : 0,36 detik, dan settling time : 0,54 detik).
DAFTAR PUSTAKA
Annexe, 1998. Methode D’identification De Strejc,
<URL:http://www.univ-lille1.fr/eudil/belk/ pra1.htm> . Bennet, S., 1988. Real Time Computer Control : An
Introduction, Prentice Hall Inc.
Chairuzzaini dkk., 1998. Metode Ziegler-Nichols pada Sistem Kontrol Servo Posisi Berbasis Komputer IBM-PC, <URL:http://www.elektroindonesia.com/
elektro/kend15.html>.
Hutomo, H., 1995. Perencanaan dan Pembuatan Fuzzy Logic Unit dengan Memakai ASCII Unit pada PLC C200H dan Salah Satu Aplikasinya, Tugas Akhir STTS.
Johnson, C. D., 1997. Process Control Instrumentation Technology, Prentice Hall Inc.
Lelic, M., 1999. PID Controllers in Nineties, Corning Incorporated Science and Technology Division Corning, New York.
Ogata, K., 1997. Teknik Kontrol Automatik I, Penerbit Erlangga.
Ogunnaike, B.A., dan Ray, W.H., 1994. Process Dynamics, Modelling and Control, Oxford University Press.
Smith, C.A., dan Corripio, A.B., 1997. Principles And Practice of Automatic Process Control, John Wiley and Sons Inc.
Willis, M. J., 1999. Proportional-Integral-Derivative Control, <URL:http://lorien.ncl.ac.uk/ming/pid/
pid.pdf>.
…., 1988. Sysmac Programmable Controller C200H Operation Manual, OMRON.
…., 1988. Sysmac C200H Analog I/O Units Operation Guide, OMRON.
…., 1992. C200H-ASC02 ASCII Unit, OMRON.
DAFTAR RIWAYAT HIDUP
Josaphat Pramudijanto dilahirkan di Pasuruan. Lulus dari bidang studi Teknik Sistem Pengaturan Jurusan Teknik Elektro ITS tahun 1989.
Kesempatan mengikuti program S2 di AIT Thailand diselesaikan pada bulan Desember 1997. Bidang PLC merupakan salah satu bidang yang ditekuni saat ini, selain topik yang terkait dengan implementasi suatu metoda pada plan riil.
Handy Wicaksono dilahirkan di Trenggalek, 4 Juni 1980. Pendidikan dasar sampai menengah ditempuh sampai tahun 1998 di kota ini juga. Tamat dari SMUN I Trenggalek dan diterima di jurusan Teknik Elektro ITS pada tahun yang sama. Lulus dari bidang studi Teknik Sistem Pengaturan Jurusan Teknik Elektro ITS dan ikut wisuda pada bulan Maret 2003.
![Tabel 2.4 Parameter kontroler model pendekatan ITAE Kon - troler Tipe Res- Pon K c T i T d PID PID Set Point Distur bance 855,9650,0ατK 947,3570.1ατK ]147,0796,0[−τατ738,0 842,0 τατ 929,0308,0ττα995,0381,0ττ](https://thumb-ap.123doks.com/thumbv2/123dok/3586494.3871589/2.892.434.859.157.464/tabel-parameter-kontroler-pendekatan-troler-point-distur-τατ.webp)