A-35
Aplikasi Firefly Algorithm Pada Kontroler PID
Untuk Mengatur Kecepatan Motor DC
Rodhi Kelvianto1, Dwi Didit Prasetiyo2, Imam Robandi3
1,2,3Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember 1[email protected], 2[email protected],3[email protected]
Abstrak
Proportional-Integral-Derivative controller merupakan kontroler yang paling banyak digunakan pada motor DC
karena berbagai macam kemudahan dalam penggunaannya. Namun, kontroler ini memiliki kekurangan karena diperlukan penalaan parameter yang seringkali menyebabkan terjadinya overshoot dan ketidakstabilan sistem. Hal ini tentu saja menyulitkan untuk mendapatkan nilai parameter Kp, Ki, dan Kd yang optimal. Oleh karena itu, diperlukan metode untuk menentukan nilai parameter optimal. Firefly algorithm digunakan untuk menala parameter optimal bagi motor DC. Firefly algorithm terinspirasi dari perilaku kunang-kunang. Kunang-kunang merupakan hewan unisex yang tertarik satu sama lain. Kunang-kunang mempunyai ciri khas dengan cahaya yang dimilikinya. Tingkat ketertarikan kunang-kunang berdasarkan pada tingkat kecerahan. Kunang-kunang dengan tingkat kecerahan lebih rendah tertarik pada kunang-kunang dengan kecerahan lebih tinggi. Dengan metode inilah dapat diperoleh nilai parameter kontroler PID yang optimal. Pada penelitian ini, dibandingkan antara menentukan parameter kontroler PID dengan trial-error dan dengan metode firefly algorithm. Pengujian dengan
firefly algorithmpada motor DC dengan set point 0.75 PU didapatkan nilai overshoot maksimal adalah 0,748.
Pada set point 1 PU, didapatkan nilai overshoot maksimal adalah 0,9974.
Kata kunci : firefly algorithm, PID controller, motor DC, trial-error
1. Pendahuluan
Kontroler PID telah banyak berperan dalam menentukan kestabilan sistem dalam berbagai aplikasi di berbagai bidang industri. Kontroler PID memiliki struktur yang sederhana sehingga mudah digunakan. Kontroler PID sering digunakan pada berbagai peralatan industri seperti Motor DC.[BHATESHVAR,2014]
Penggunaan kontroler PID pada motor DC dilakukan untuk mengatur berbagai variabel seperti kecepatan motor DC. Dari berbagai penelitian yang telah dilakukan didapatkan berbagai metode dalam menentukan parameter optimal bagi kontroler PID. Metode trial and error sering digunakan karena kemudahan dalam aplikasinya. Namun, metode ini membutuhkan waktu yang lama dan tingkat akurasi yang rendah untuk menentukan parameter yang optimal.[K. PREMKUMAR,2015]
Dari berbagai penelitian akhir-akhir ini, metode penalaan parameter PID lebih banyak menggunakan berbagai macam kecerdasan buatan
(artificial intelligent) karena tingkat akurasi yang
lebih tinggi. Para peneliti telah meneliti berbagai macam perilaku berbagai macam hewan seperti lebah, semut, dan tawon. Dari perilaku hewan tersebut didapatkan perilaku atau tingkah laku yang kemudian digunakan sebagai metode optimisasi kontroler PID.[ASHU AHUJA,2014]
Firefly algorithm diformulasikan pertama kali
oleh Xin-She Yang. Algoritma initerinspirasi oleh perilaku kunang-kunang. Kunang-kunang memiliki perilaku khas dengan mengeluarkan cahaya. Tingkat kecerahan tiap kuang-kunang berbeda-beda. Kunang-kunang merupakan hewan unisex yang tertarik satu sama lain. Tingkat ketertarikan dipengaruhi oleh tingkat kecerahan dari cahaya yang dihasilkan.[YANG,2013]
Beberapa metode konvensional maupun metode cerdas telah digunakan untuk optimimisasi kontroler PID, antara lain Genenti Algorithm,
Particle Swarm Optimization, dan Artificial Bee Colony.Wudai Liao, (2014) ;D. Chen, (2007) W. Zhang, 2010.
Penelitian ini menggunakan metode firefly
algorithm untuk menala parameter PID. Hasil
penelitian membandingkan penalaan kontroler PID dengan metode trial and error dengan metode
firefly algorithm.
2. Pemodelan Sistem
2.1 Motor DC[NITISH KATAL, 2012]
Motor DC yang digunakan pada penelitian ini adlah motor DC magnet permanen. Motor DC bekerja berdasarkan arus searah. Motor DC terdiri atas stator rotor, dan komutator. Stator merupakan bagian yang menghasilkan medan magnet dan tidak berputar. Bagian yang berputar pada motor DC
A-36 disebut rotor. Permodelan motor DC mengacu pada penelitian sebelumnya. Motor DC yang digunakan memiliki rating kecepatan 1400 rpm. Kecepatan pada saat pengukuran adalah 1250 rpm. Motor DC dimodelkan dalam bentuk transfer function,
𝐺 (𝑠) = 𝐾𝑚
𝑇𝑚𝑆+1 (1)
di mana Km adalah mechanical gain dan Tm adalah mechanical time constant. Sebuah step voltage signal ditambahkan ke motor berdasarkan nilai
pengukuran sehingga didapatkan persamaan sebagai berikut,
𝐺 (𝑠) =0,18𝑠+12,75 (2)
2.2 Kontroler PID [WUDAI LIAO,2014]
Kontroler PID merupakan kontroler yang paling sering dipakai dalam dunia industri terutama untuk peralatan motor DC [1]. Persamaan kontroler PID dimodelkan, 𝑢(𝑡) = 𝐾𝑝 [𝑒(𝑡) +𝑇1 𝑖∫ 𝑒(𝑡)𝑑𝑡 + 𝑇𝑑 𝑑𝑒𝑡 𝑑𝑡] 1 0 (3)
di mana u(t) adalah nilai yang dihitung oleh kontroler PID. Kpmerupakan koefisisen
proportional, Ti merupakan integral time, dan Td
merupakan differential time constant. Fungsi dari setiap bagian pada kontroler PID adalah sebagai berikut.
- Proportional menunjukkan deviasi sinyal e(t). Ketika sinyal dihasilkan maka kontroler akan mengurangi penyimpangan (error) sinyal. - Integtral digunakan untuk menghilangkan
error dan meningatkan stabilitas sistem
- Differentialdigunakan untuk menunjukkan perubahan penyimpangan sinyal, memperbaiki respon sinyal sebelum penyimpangannya menjadi lebih besar, dan mempercepat respon sistem untuk mengurangi setting time. Kontroler PID memiliki parameter Kp, Ki, dan
Kd. Nilai parameter inilah yang mempengaruhi
kinerja sistem secara keseluruhan. Pada penelitian ini, firefly algorithm berfungsi untuk mencari parameter yang optimal. Pada sistem kontrol motor DC, variabel yang dikontrol adalah kecepatan motor DC dan tegangan sebagi output. Blok diagram sistem kontrol motor DC ditunjukkan pada Gambar 1 berikut ini.
Gambar 1. Blok diagram sistem kontrol motor DC
3. Firefly Algorithm[YANG,2013]
Firefly Algorithm adalah salah satu swarm intelligence yang merupakan sebuah algoritma
metaheuristik yang terinspirasi dari perilaku berkedip kunang-kunang. Algortima ini diformulasikan denga pemodelan matematika analisis untuk pemecahan masalah dengan tujuan ekuivalen fungsi. Hasilnya dibandingkan dengan teknik optimisasi lain pada literatur untuk menunjukkan bahwa Firefly Algorithm mampu mengoptimisasi parameter PID dengan baik. Algoritma kunang-kunang yang dikembangkan Xin-Shie Yang dapat dirumuskan sebagai berikut :
1. Semua kunang-kunang berjenis kelamin satu jadi suatu kunang-kunang akan tertarik pada kunang-kunang yang lain.
2. Daya tarik sebanding dengan tingkat kecerahan kunang-kunang. Oleh karena itu, kunang-kunang dengan tingkat kecerahan akan tertarik dan bergerak ke kunang-kunang dengan tingkat kecerahan yang lebih tinggi. Kecerahan kunang-kunang akan menurun karena jarak antara kunang-kunang meningkat.
3. Intensitas cahaya kunang-kunang ditentukan oleh fungsi tujuan dari masalah yang diberikan.
Berdasarkan pada ketiga peraturan ini, langkah dasar firefly algorithm dapat dirumuskan sebagai
pseudo code sebagai berikut :
Fungsi objektif f(x), x = (
x
1,…,x
d)
TInisiaslisasi populasi kunang-kunang
x
i (i=1,2,…n) Tentukan koefisien penyerapan cahaya
while(t
Max generation)fori = 1 : n semua n kunang-kunang forj = 1 : i semua n kunang-kunang
Intensitas cahaya
I
i padax
i ditentukan oleh f(x
i) ( j i)if I I
Pindahkan kunang-kunang I menuju j pada dimensi d
end if
Ketertarikan populasi dengan jarak r pada exp[-
r]Evaluasi solusi baru dan perbarui intensitas cahaya
end for j end for i
Urutkan peringkat kunang-kunang dan cari posisi terbaik baru
end while
Tampilkan hasil
Dalam menerapkan firefly algorithm terdapat beberapa prosedur standar yaitu :
A-37 1. Inisialisasi populasi firefly, jumlah iterasi, dan
parameter firefly algorithm.
2. Evaluasi fungsi fitness pada tiap firefly.
3. Inisialisasi fungsi fitness awal sebagai penentuan tingkat kecerahan cahaya wal. 4. Tiap calon firefly terbaik dibandingkan dari nilai
fungsi fitness agar mendapatkan nilai firefly terbaik.
5. Lakukan sampai mendapatkan firefly dengan fungsi fitness yang cukup baik atau sampai batas iterasi yang telah ditentukan.
4. Optimisasi Kontrler PID dengan Firefly
Algorithm
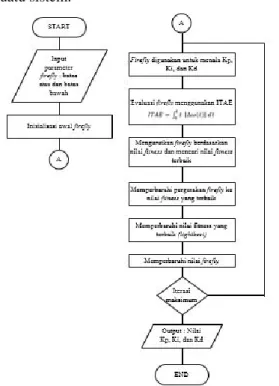
Gambar 2 menunjukkan diagram alir algoritma metode Firefly Algorithm (FA) yang digunakan pada penelitian ini untuk mengoptimisasi parameter PID. Fungsi objektif yang digunakan untuk menguji kestabilan sistem adalah dengan Integral Time Absolut Error (ITAE).
0
( )
t
ITAE
tt dt (4)Parameter PID yang dioptimisasi oleh FA adalah Kp, Ki dan Kd. Adapun untuk diagram alir proses penalaan parameter PID dengan menggunakan metode Firefly Algorithm (CSA) ditunjukkan oleh flowchart pada Gambar 5 dan gambar 4 menunjukkan pemodelan motor DC pada Simulink Matlab 2013, dengan trial-error, dan PID – Firefly Algorithm. Dengan melihat diagram alur maka akan lebih memudahkan kita untuk mengetahui proses yang dilakukan untuk menyusun suatu sistem.
Gambar 2. Diagram Alir Firefly Algorithm
Adapun data parameter-parameter adalah sebagaiberikut,
Tabel 1. Parameter Firefly Algorithm Parameter FA Nilai Alpha 0,5 Beta 0,5 Gamma 0,5 Dimensi 3 Jumlah Kunang-Kunang 50 Iterasi maksimum 50
Hasil optimisasi dengan metode FA dapat dlilihat dari gambar berikut :
Gambar 3. Hasil Optimisasi Kontroler PID dengan
FA pada MATLAB pada set point 0,75 p.u.
Tabel 2. Hasil Optimisasi PID dengan FA (set
point 0,75 p.u) Total number of iterations=5000 nbest = 0 2,0080 0,0623 Lightbest = 1,0265 Kp_ff = 0 Ki_ff = 2,0080 Kd_ff = 0,0623
Hasil optimisasi FA pada set point 0,75 p.u diperoleh nilai Kp adalah 0 dari selang parameter Kp antara 0 hingga 40, nilai Ki adalah 2,0080 dari selang parameter Ki antara 0 hingga 10, dan nilai Kd adalah 0,0623 dari selang parameter Kd antara 0 hingga 1. Dari hasil simulasi tersebut dapat disimpulkan bahwa hasil optimisasi dari parameter PID sudah berjalan dengan baik.
A-38
Gambar 4. Hasil Optimisasi Kontroler PID dengan
FA pada MATLAB pada set point 1 p.u.
Tabel 3. Hasil Optimisasi PID dengan FA (set
point 1 p.u) Total number of iterations=5000 nbest = 0 7,503 0,3698 Lightbest = 5,7328 Kp_ff = 0 Ki_ff = 0,7503 Kd_ff = 0,3698
Hasil optimisasi FA pada set point 1 p.u diperoleh nilai Kp adalah 0 dari selang parameter Kp antara 0 hingga 40, nilai Ki adalah 0,7503 dari selang parameter Ki antara 0 hingga 10, dan nilai Kd adalah 0,3698 dari selang parameter Kd antara 0 hingga 1. Dari hasil simulasi tersebut dapat disimpulkan bahwa hasil optimisasi dari parameter PID sudah berjalan dengan baik.
5. Hasil Simulasi dan Analisis
Pada sistem motor PMDC pada percobaan kali ini digunakan rating motor PMDC sebesar 1400 rpm. Set point yang digunakan pada percobaan ini adalah 0,75 p.u (937,5 rpm) dan 1 p.u (1250 rpm).
5.1 Respon Kecepatan Motor DC Dengan Set Point 0,75 P.U.
Gambar dibawah ini adalah pemodelan motor DC pada simulik dengan set point 0,75 p.u.
Gambar 5. Pemodelan Motor DC di Simulink dengan
set point 0,75 p.u.
Simulasi pertama adalah simulasi open loop Motor DC dengan set point0,75 p.u. Berikut hasil simulasi.
Gambar 6. Respon Kecepatan Motor DC dengan Set
Point 0,75 p.u.
Gambar 6 diatas menunjukkan respon kecepatan motor DC dengan set point 0,75 p.u. Dari grafik dapat dilihat bahwa PID Trial-Error memiliki
overshoot yang lebih besar dibanding PID yang
dioptimisasi dengan Firefly Algorithm. Dari grafik dapat dilihat bahwa nilai overshoot minimal PID
Trial-Error adalah 0 dan nilai overshoot maksimal
adalah 0,8781 sedangkan PID yang dioptimisasi dengan Firefly Algorithm, nilai overshoot minimal adalah 0 dan nilai overshoot maksimal adalah 0,748. 5.2 Respon Kecepatan Motor DC Dengan Set
Point 1 P.U.
Gambar dibawah ini adalah pemodelan motor DC pada simulik dengan set point 1 p.u.
Gambar 7. Pemodelan Motor DC di Simulink
dengan set point 1 p.u.
Simulasi kedua adalah simulasi open loop Motor PMDC dengan set point 1 p.u. Berikut hasil simulasi.
A-39
Gambar8. Respon Kecepatan Motor DC dengan Set
Point 1 p.u.
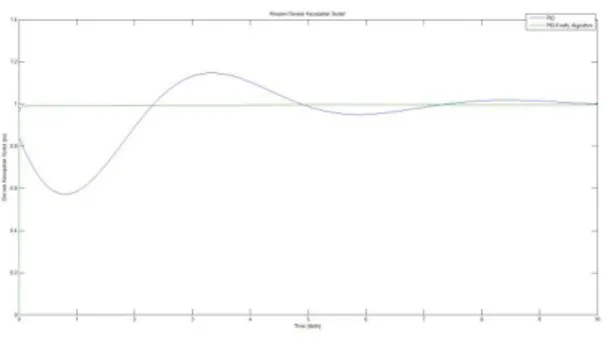
Gambar 8.diatas menunjukkan respon kecepatan motor DC dengan set point 1 p.u. Dari grafik dapat dilihat bahwa PID Trial-Error memiliki overshoot yang lebih besar dibanding PID yang dioptimisasi dengan Firefly Algorithm. Dari grafik dapat dilihat bahwa nilai overshoot minimal PID Trial-Error adalah 0 dan nilai overshoot maksimal adalah 1,147 sedangkan PID yang dioptimisasi dengan Firefly Algorithm, nilai
overshoot minimal adalah 0 dan nilai overshoot
maksimal adalah 0,9974.
6. Kesimpulan
Dengan menggunakan metode Artificial Intelligent Firefly Algorithm (FA) sebagai metode
penalaan kontroler PIDdiperoleh hasil bahwarespon kecepatan motor DC dengan PID-FA diperoleh nilai overshoot yang lebih kecil dibanding dengan metode trial-error, ini berarti dengan menggunakan metode kecerdasan buatan untuk mengoptimisasi parameter PID, hasil yang diperoleh untuk kinerja PID sangat baik karena menunjukkan respon yang cepat untuk pengaturan motor DC. . Pengujian dengan firefly algorithm pada motor DC dengan set point 0.75 PU didapatkan nilai overshoot maksimal adalah 0,748. Pada set point 1 PU, didapatkan nilai
overshoot maksimal adalah 0,9974.
DAFTAR PUSTAKA
B. Liu, J. Tan, and C. Huang, (2007) :Research and
Application of an Improved PID Control Algorithm. Microcomputer Information, vol. 6,
no. 1, pp. 15-17, 2007.
Bhateshvar,Y,K. (2014) : Power–Frequency Balance With Superconducting Magnetic Energy Storage Using Optimized Intelligent Controller. Energetika.2014.
K. Premkumar. (2015) :Fuzzy PID supervised
online ANFIS based speed controller for brushless dc motor. Sciencedirect. Neurocomputing.2015.
Ashu Ahuja. (2014) :Design of fractional order
PID controller for DC motor usingevolutionary
optimization techniques".WSEAS Transactions
on Systems and Control.2014.
Umesh Kumar Bansal.(2013) : Speed Control of
DC Motor Using Fuzzy PID Controller.
Advance in Electronic and Electric Engineering.2013.
Yang, X,S. (2013) : Cuckoo Search and Firefly
Algorithms Theory and Applications. 2013.
Wudai Liao, (2014) : Optimization of PID Control for DC Motor Based On Artificial Bee Colony Algorithm.2014.
Yang, X,S. (2008) : Nature-Inspired Metaheuristic
Algorithms. Frome: Luniver Press. 2008.
X. Wang, and M. Zhang, (2004) :Optimizing PID
parameters by using improved particle swarm optimization algorithm. Process Automation
Instrumentation, no. 2, pp. 1-9, 2004.
D. Chen, K. Fang, and Q. Chen. (2007) :Application of genetic algorithm in PID
parameters optimization. Microcomputer Information, vol. 23, no.3, pp. 35-36, 2007. H. He and F. Qian.(2007) : The PID parameter
tuning based on immune evolutionary algorithm. Microcomputer Information, vol. 27,
no. 5, pp. 1174-1176, 2007.
W. Zhang. (2010) : Increment PID controller based
on immunity particle swarm optimization algorithm, Microcomputer Information, vol. 28,
no.7, pp. 67-69, 2010.
Nitish Katal. (2012) :Optimal Tuning of PID
Controller for DC Motor usingBio-Inspired Algorithms".International Journal of Computer
Applications.2012.
Bharat Bhushan. (2011) :Adaptive control of DC
motor using bacterial foraging algorithm".Applied Soft Computing sciencedirect.2011.
Anant Oonsivilai. (2008) : Optimum PID Controller tuning for AVR System using Adaptive Tabu Search, 12th WSEAS International Conference on COMPUTERS, Heraklion, Greece, July 23-25, 2008.
A-40